基于从零启动的无感FOC控制方法,实现了航模电机的高动态响应控制。
使用某M0芯片,20k开关频率,采样和中断计算无法倍频,整个FOC计算时间不超过33us。48V供电,满载60A,瞬态90A。
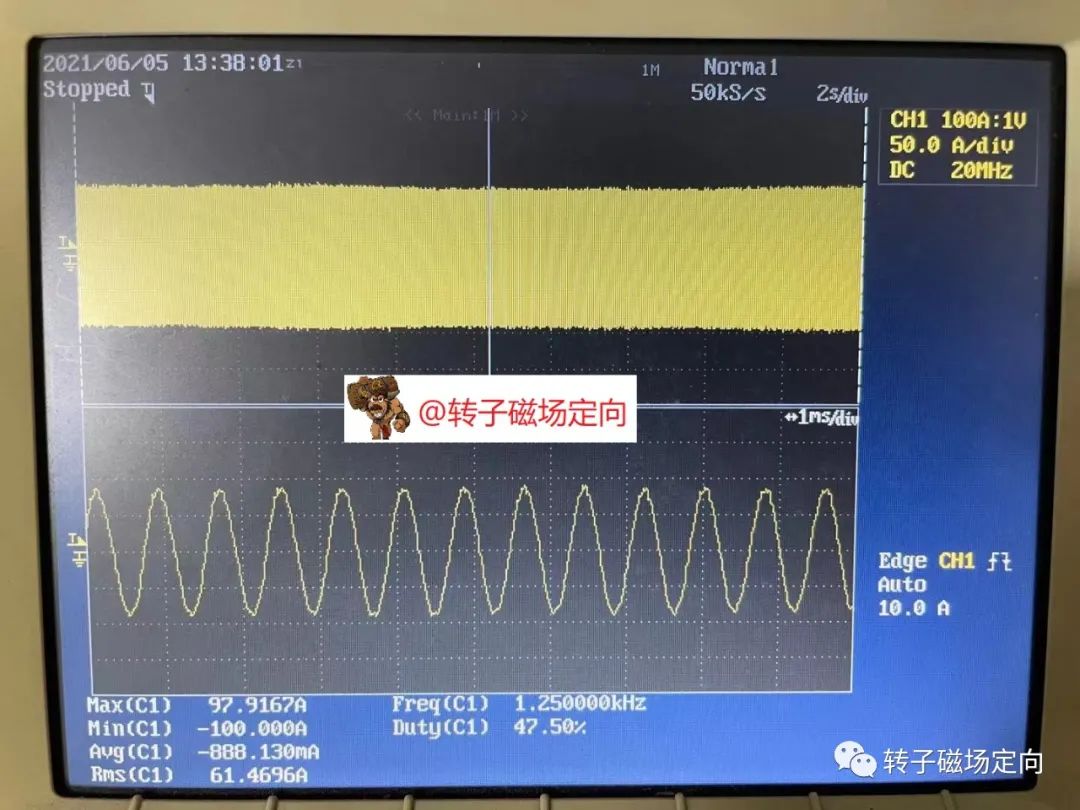
使用20k开关频率,航模电机电角频率1300Hz,波形正弦度高。
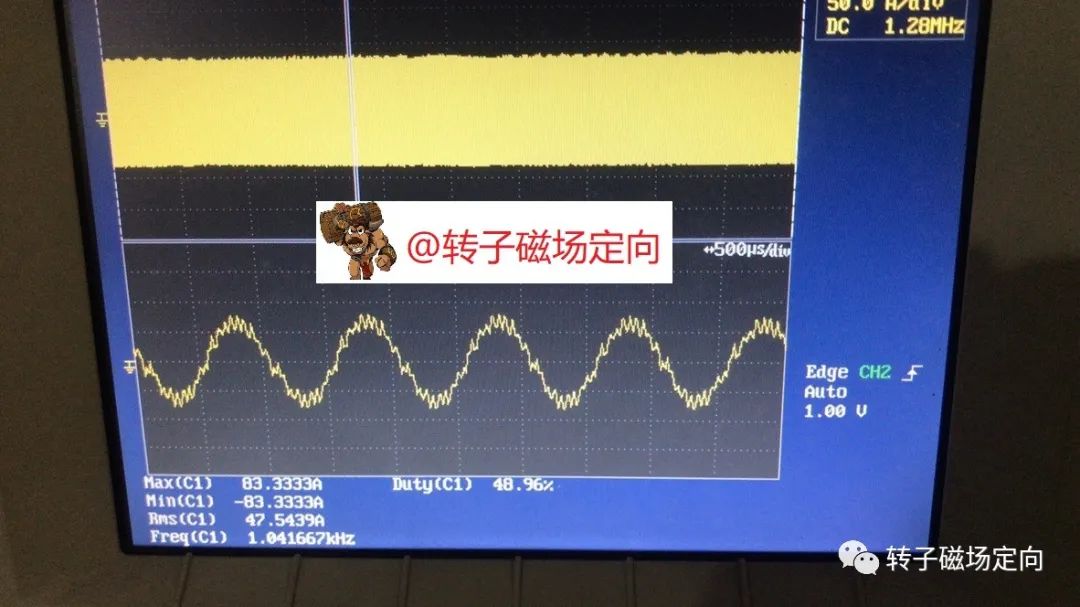
调试过程中,电角频率1000Hz,尝试10k开关频率,依然能获得较高的波形正弦度。动态响应依然不错,当然因为开关频率只有10k,电流的谐波相比20k大一些。
暴力加减速测试,动态响应好,电流波形处于频繁的加减速调节过程中。同时减速时在发电模式下必须限制转矩,保证电池不过压:
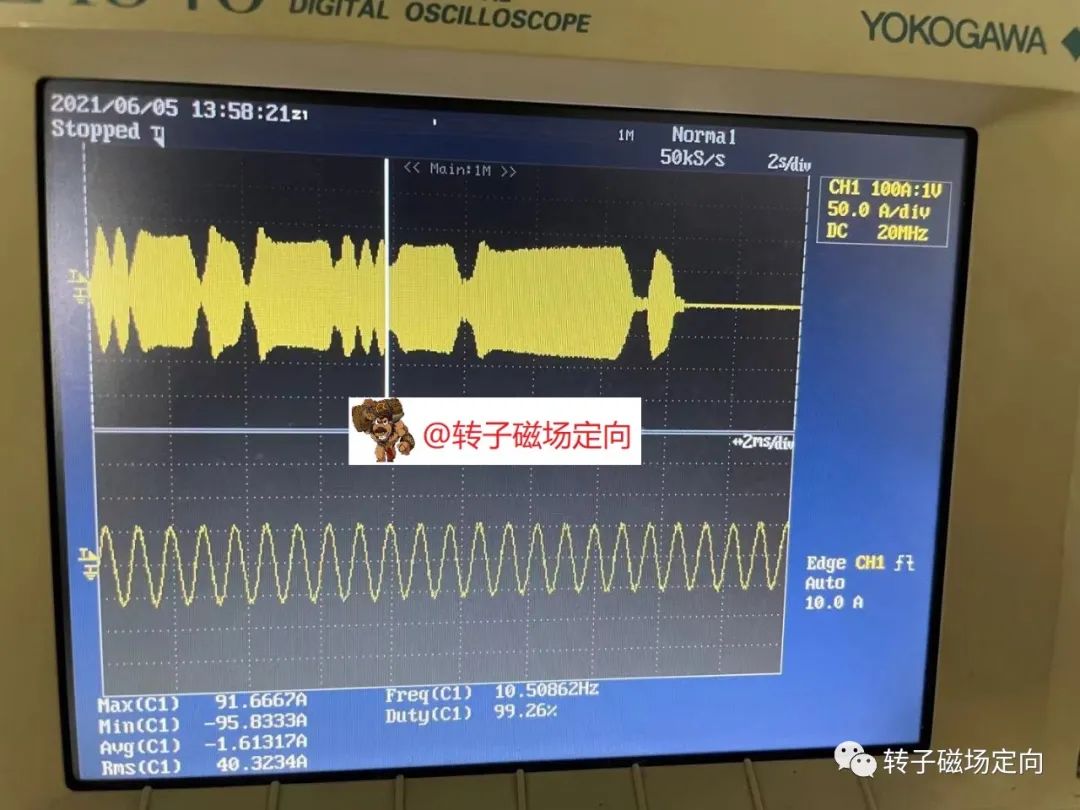
使用遥控器进行频繁暴力的加减速测试,视频如下:
最大拉力测试,设计载重10kg,在3500rpm左右实测稳态拉力输出可以达到17kg。
后续改版后,最大转速3800rpm左右在稳态下输出20kg的拉力。
户外飞行视频,载重10kg,调节速度快,飞行姿态稳,视频如下:
―― The End?――
推荐好文??点击蓝色字体即可跳转

欢迎转发、留言、点赞、分享给你的朋友,感谢您的支持!
点击上方即可关注公众号
分享?💬??点赞?👍??在看????
以“三连”行动支持优质内容!