OPENMV-STM32����ͨ��
ǰ��
���Ҫ����Ѳ��,ͻȻҪ������Ҫ�����Ӿ�����,����������������¹���һ��Openmv,��ǰѧϰOpenmv����ͨ�����Զ�����п���,��������ѧϰOpenMV��ԶԶ������,����Ҫʵ���뵥Ƭ����ͨ��,����Ϊ�ܼ�,��CSDN,github������һЩ��Դ����,Ȼ����и�����ճ��,ԭ������Ϊ���������,�����ں��ڵĴ����ҷ�������ͼ��Ĵ���,�м�Ҳ��ӳ���ҵ�һЩ����,�����ͨ��OLED���������ݴ���,���Ժ�,���ص�д�´˲�������¼���Լ���ѧϰ������
Ӳ��ѡ��
��ѡ�����openmv4 CamH7��������ͷ,OLED, stm32f104c8t6, ST-JINK, ���������ߺͶŰ���
Ӳ����ͨ������
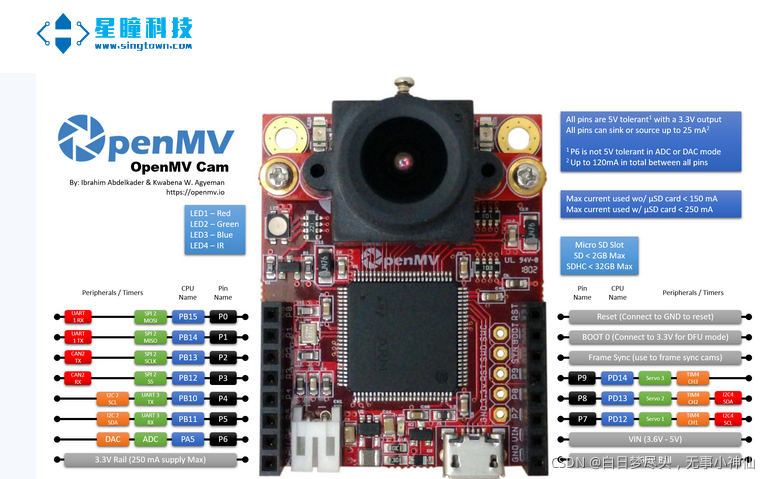 ����openmv4 CamH7��������ͷ,��ͼ��֪openmv4 CamH7ֻ��1������,USART3,
����openmv4 CamH7��������ͷ,��ͼ��֪openmv4 CamH7ֻ��1������,USART3,
��ͼ֪UART_RX��P5 UART_TX��P4
��ô��STM32��
 ����ѡ��PB10,PB11,�����д���ѡ��USART3.
����ѡ��PB10,PB11,�����д���ѡ��USART3.
STM32��TX(RX)��OpenMV��RX(TX),OLED���ӵ�STM32����
OPENMV��������
import sensor, image, time,math,pyb
from pyb import UART,LED
import json
import ustruct
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.skip_frames(time = 2000)
sensor.set_auto_gain(False) # must be turned off for color tracking
sensor.set_auto_whitebal(False) # must be turned off for color tracking
red_threshold_01=(10, 100, 127, 32, -43, 67)
clock = time.clock()
uart = UART(3,115200) #���崮��3����
uart.init(115200, bits=8, parity=None, stop=1) # init with given parameters
def find_max(blobs): #����Ѱ��ɫ��������ĺ���
max_size=0
for blob in blobs:
if blob.pixels() > max_size:
max_blob=blob
max_size = blob.pixels()
return max_blob
def sending_data(cx,cy,cw,ch):
global uart;
#frame=[0x2C,18,cx%0xff,int(cx/0xff),cy%0xff,int(cy/0xff),0x5B];
#data = bytearray(frame)
data = ustruct.pack("<bbhhhhb", #��ʽΪ�����ַ�����������(2�ֽ�)
0x2C, #֡ͷ1
0x12, #֡ͷ2
int(cx), # up sample by 4 #����1
int(cy), # up sample by 4 #����2
int(cw), # up sample by 4 #����1
int(ch), # up sample by 4 #����2
0x5B)
uart.write(data); #����Ҫ����һ���ֽ�����
while(True):
clock.tick()
img = sensor.snapshot()
blobs = img.find_blobs([red_threshold_01])
cx=0;cy=0;
if blobs:
max_b = find_max(blobs)
#����ҵ���Ŀ����ɫ
cx=max_b[5]
cy=max_b[6]
cw=max_b[2]
ch=max_b[3]
img.draw_rectangle(max_b[0:4]) # rect
img.draw_cross(max_b[5], max_b[6]) # cx, cy
FH = bytearray([0x2C,0x12,cx,cy,cw,ch,0x5B])
#sending_data(cx,cy,cw,ch)
uart.write(FH)
print(cx,cy,cw,ch)
�������ҽ������λ�����Ĵ�������
����Ϊʲô��ֱ��ʹ��send()����,������������ô��Ϊ��
bytearray([, , ,])���uart.write()��������ֱ�ӵ���sending_data(cx,cy,cw,ch)������һ����
�ҿ���������ν,����ʹ����send()����,��ʵ����������ν��,ֻҪ�ܹ��������ݾ��С�
����������ͨ��openmv�Ե��Խ��д���ͨ�����ж�openmv�Ƿ�ͨ�ųɹ�,��openmv��TTL����,��������XCOM�����в鿴�����Ƿ���ɹ�
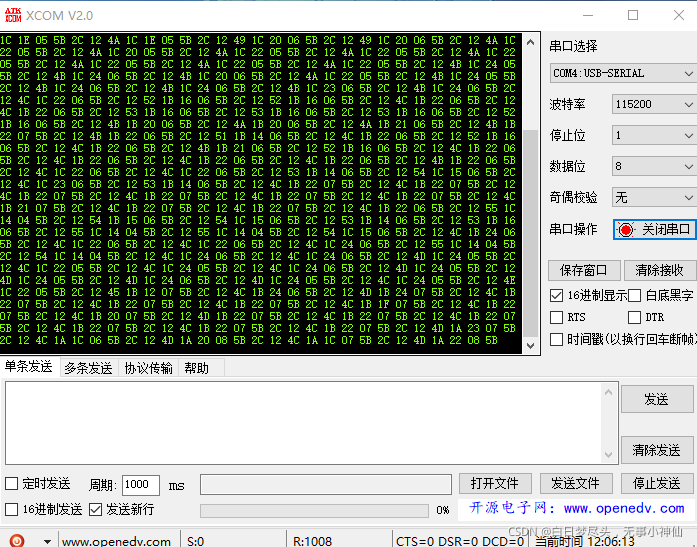
����ͨ�ųɹ�,������Ч
�����ǿ���STM32�ij���,����Ҫ���ڵ�����,����Ҫ�Ĵ�������ΪUSART3,
#include "uart.h"
#include "show.h"
#include "gpio.h"
u8 Cx=0,Cy=0,Cw=0,Ch=0;
void uart3_Init(void)
{
//USART3_TX PB10
//USART3_RX PB11
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_11;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel=USART3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority=2;
NVIC_Init(&NVIC_InitStructure);
USART_InitStructure.USART_BaudRate = 115200; //���ڲ�����Ϊ115200
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //�ֳ�Ϊ8λ���ݸ�ʽ
USART_InitStructure.USART_StopBits = USART_StopBits_1; //һ��ֹͣλ
USART_InitStructure.USART_Parity = USART_Parity_No; //����żУ��λ
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //��Ӳ������������
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //�շ�ģʽ
USART_Init(USART3, &USART_InitStructure);
USART_ITConfig(USART3, USART_IT_RXNE, ENABLE); //ʹ���ж�
USART_Cmd(USART3, ENABLE); //ʹ�ܴ���3
USART_ClearFlag(USART3, USART_FLAG_TC); //�崮��3���ͱ�־
}
void USART3_IRQHandler(void)
{
u8 com_data;
u8 i;
static u8 RxCounter1=0;
static u16 RxBuffer1[10]={0};
static u8 RxState = 0;
static u8 RxFlag1 = 0;
if( USART_GetITStatus(USART3,USART_IT_RXNE)!=RESET) //�����ж�
{
USART_ClearITPendingBit(USART3,USART_IT_RXNE); //����жϱ�־
com_data = USART_ReceiveData(USART3); //����3��������
if(RxState==0&&com_data==0x2C) //0x2c֡ͷ��ʼ���ݽ��մ���
{
RxState=1;
RxBuffer1[RxCounter1++]=com_data;
OLED_Refresh_Gram();
// GPIO_SetBits(GPIOB,GPIO_Pin_4);
}
else if(RxState==1&&com_data==0x12) //0x12֡ͷ
{
RxState=2;
RxBuffer1[RxCounter1++]=com_data;
}
else if(RxState==2)
{
RxBuffer1[RxCounter1++]=com_data;
if(RxCounter1>=10||com_data == 0x5B) //RxBuffer1��������,���߽������ݽ���
{
RxState=3;
RxFlag1=1;
Cx=RxBuffer1[RxCounter1-5];
Cy=RxBuffer1[RxCounter1-4];
Cw=RxBuffer1[RxCounter1-3];
Ch=RxBuffer1[RxCounter1-2];
}
}
else if(RxState==3) //����Ƿ���ܵ�������־
{
if(RxBuffer1[RxCounter1-1] == 0x5B)
{
USART_ITConfig(USART3,USART_IT_RXNE,DISABLE);//�ر�DTSABLE�ж�
if(RxFlag1)
{
OLED_Refresh_Gram();
OLED_ShowNumber(0, 0,Cx,3,16);
OLED_ShowNumber(0,17,Cy,3,16);
OLED_ShowNumber(0,33,Cw,3,16);
OLED_ShowNumber(0,49,Ch,3,16);
oled_show();
}
RxFlag1 = 0;
RxCounter1 = 0;
RxState = 0;
USART_ITConfig(USART3,USART_IT_RXNE,ENABLE);
}
else //���մ���
{
RxState = 0;
RxCounter1=0;
for(i=0;i<10;i++)
{
RxBuffer1[i]=0x00; //�����������������,���¿�ʼ����
}
}
}
else //�����쳣
{
RxState = 0;
RxCounter1=0;
for(i=0;i<10;i++)
{
RxBuffer1[i]=0x00; //�����������������
}
}
}
}
�������:RxBuffer1[]�����������洢���ݵ�,�ȴ洢֡ͷ,��洢����,֡ͷ����ֵ������ѡ,0x2cΪ����֡��֡ͷ,�����������Ŀ�ʼ,����һ��֡ͷ���ܻ����żȻ��,�����������֡ͷ0x2c��0x12�Ա����ж��м���Ƿ����֡ͷ�Ա����������ݡ�0x5bΪ֡β,������֡�����ı�־�����Ǵ������������Ҫ7���ж�,������7���жϺ���ܽ����������ȥ��
OLEDģ�����ڴ��������������,������ʹ�õ�������OLED,����OLED���������ܻ����г�������OLED���ܲ�һ��,���������Ȱ�OLED��������д��,
#include "oled.h"
#include "stdlib.h"
#include "oledfont.h"
#include "delay.h"
u8 OLED_GRAM[128][8];
/**************************************************************************
Function: Refresh the OLED screen
Input : none
Output : none
��������:ˢ��OLED��Ļ,���»���,��ʾ����
��ڲ���:��
���� ֵ:��
**************************************************************************/
void OLED_Refresh_Gram(void)
{
u8 i,n;
for(i=0;i<8;i++)
{
OLED_WR_Byte (0xb0+i,OLED_CMD); //����ҳ��ַ(0~7)
OLED_WR_Byte (0x00,OLED_CMD); //������ʾλ�á��е͵�ַ
OLED_WR_Byte (0x10,OLED_CMD); //������ʾλ�á��иߵ�ַ
for(n=0;n<128;n++) OLED_WR_Byte(OLED_GRAM[n][i],OLED_DATA);
}
}
/**************************************************************************
Function: Refresh the OLED screen
Input : Dat: data/command to write, CMD: data/command flag 0, represents the command;1, represents data
Output : none
��������:��OLEDд��һ���ֽ�
��ڲ���:dat:Ҫд�������/����,cmd:����/�����־ 0,��ʾ����;1,��ʾ����
���� ֵ:��
**************************************************************************/
void OLED_WR_Byte(u8 dat,u8 cmd)
{
u8 i;
if(cmd) //�����������
OLED_RS_Set(); //DC�ж�
else
OLED_RS_Clr(); //DC�ж�
for(i=0;i<8;i++) //��������
{
OLED_SCLK_Clr();
if(dat&0x80)
OLED_SDIN_Set();
else
OLED_SDIN_Clr();
OLED_SCLK_Set();
dat<<=1;
}
OLED_RS_Set();
}
/**************************************************************************
Function: Turn on the OLED display
Input : none
Output : none
��������:����OLED��ʾ
��ڲ���:��
���� ֵ:��
**************************************************************************/
void OLED_Display_On(void)
{
OLED_WR_Byte(0X8D,OLED_CMD); //SET DCDC����
OLED_WR_Byte(0X14,OLED_CMD); //DCDC ON
OLED_WR_Byte(0XAF,OLED_CMD); //DISPLAY ON
}
/**************************************************************************
Function: Turn off the OLED display
Input : none
Output : none
��������:�ر�OLED��ʾ
��ڲ���:��
���� ֵ:��
**************************************************************************/
void OLED_Display_Off(void)
{
OLED_WR_Byte(0X8D,OLED_CMD); //SET DCDC����
OLED_WR_Byte(0X10,OLED_CMD); //DCDC OFF
OLED_WR_Byte(0XAE,OLED_CMD); //DISPLAY OFF
}
/**************************************************************************
Function: Screen clear function, clear the screen, the entire screen is black, and did not light up the same
Input : none
Output : none
��������:��������,������,������Ļ�Ǻ�ɫ��,��û����һ��
��ڲ���:��
���� ֵ:��
**************************************************************************/
void OLED_Clear(void)
{
u8 i,n;
for(i=0;i<8;i++)for(n=0;n<128;n++)OLED_GRAM[n][i]=0X00;
OLED_Refresh_Gram();//������ʾ
}
/**************************************************************************
Function: Draw point
Input : x,y: starting coordinate;T :1, fill,0, empty
Output : none
��������:����
��ڲ���:x,y :�������; t:1,���,0,���
���� ֵ:��
**************************************************************************/
void OLED_DrawPoint(u8 x,u8 y,u8 t)
{
u8 pos,bx,temp=0;
if(x>127||y>63)return;//��������.
pos=7-y/8;
bx=y%8;
temp=1<<(7-bx);
if(t)
OLED_GRAM[x][pos]|=temp;
else
OLED_GRAM[x][pos]&=~temp;
}
/**************************************************************************
Function: Displays a character, including partial characters, at the specified position
Input : x,y: starting coordinate;Len: The number of digits;Size: font size;Mode :0, anti-white display,1, normal display
Output : none
��������:��ָ��λ����ʾһ���ַ�,���������ַ�
��ڲ���:x,y :�������; len :���ֵ�λ��; size:�����С; mode:0,������ʾ,1,������ʾ
���� ֵ:��
**************************************************************************/
void OLED_ShowChar(u8 x,u8 y,u8 chr,u8 size,u8 mode)
{
u8 temp,t,t1;
u8 y0=y;
chr=chr-' '; //�õ�ƫ�ƺ��ֵ,ASALLѰ��λ�� ,��һȥ��
for(t=0;t<size;t++)
{
if(size==12) temp=oled_asc2_1206[chr][t]; //����1206����
else temp=oled_asc2_1608[chr][t]; //����1608���� ��16��8
for(t1=0;t1<8;t1++)
{
if(temp&0x80) OLED_DrawPoint(x,y,mode); //���
else OLED_DrawPoint(x,y,!mode);
temp<<=1;
y++;
if((y-y0)==size) //1206�Ŀ���,������Ƶ�12λ��ֹͣ
{
y=y0;
x++;
break;
}
}
}
}
/**************************************************************************
Function: Find m to the NTH power
Input : m: base number, n: power number
Output : none
��������:��m��n�η��ĺ���
��ڲ���:m:����,n:�η���
���� ֵ:��
**************************************************************************/
u32 oled_pow(u8 m,u8 n)
{
u32 result=1;
while(n--)result*=m;
return result;
}
/**************************************************************************
Function: Displays 2 numbers
Input : x,y: starting coordinate;Len: The number of digits;Size: font size;Mode: mode, 0, fill mode, 1, overlay mode;Num: value (0 ~ 4294967295);
Output : none
��������:��ʾ2������
��ڲ���:x,y :�������; len :���ֵ�λ��; size:�����С; mode:ģʽ, 0,���ģʽ, 1,����ģʽ; num:��ֵ(0~4294967295);
���� ֵ:��
**************************************************************************/
void OLED_ShowNumber(u8 x,u8 y,u32 num,u8 len,u8 size)
{
u8 t,temp;
u8 enshow=0;
for(t=0;t<len;t++)
{
temp=(num/oled_pow(10,len-t-1))%10;
if(enshow==0&&t<(len-1))
{
if(temp==0)
{
OLED_ShowChar(x+(size/2)*t,y,' ',size,1);
continue;
}
else enshow=1;
}
OLED_ShowChar(x+(size/2)*t,y,temp+'0',size,1);
}
}
/**************************************************************************
Function: Display string
Input : x,y: starting coordinate;*p: starting address of the string
Output : none
��������:��ʾ�ַ���
��ڲ���:x,y :�������; *p:�ַ�����ʼ��ַ
���� ֵ:��
**************************************************************************/
//��16����
void OLED_ShowString(u8 x,u8 y,const u8 *p)
{
#define MAX_CHAR_POSX 122
#define MAX_CHAR_POSY 58
while(*p!='\0')
{
if(x>MAX_CHAR_POSX){x=0;y+=16;}
if(y>MAX_CHAR_POSY){y=x=0;OLED_Clear();}
OLED_ShowChar(x,y,*p,12,1);
x+=8;
p++;
}
}
/**************************************************************************
Function: Initialize the OLED
Input : none
Output : none
��������:��ʼ��OLED
��ڲ���: ��
���� ֵ:��
**************************************************************************/
void OLED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //ʹ��PB�˿�ʱ��
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3|GPIO_Pin_4|GPIO_Pin_5;//�˿�����
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //�������
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz; //2M
GPIO_Init(GPIOB, &GPIO_InitStructure); //�����趨������ʼ��GPIO
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //��A��ʱ�ӡ�
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz; //�������
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
PWR_BackupAccessCmd(ENABLE); //������RTC �ͺĴ���
RCC_LSEConfig(RCC_LSE_OFF); //�ر��ⲿ�����ⲿʱ���źŹ��� ��,PC13 PC14 PC15 �ſ��Ե���ͨIO�á�
BKP_TamperPinCmd(DISABLE); //�ر����ּ���,Ҳ���� PC13,Ҳ���Ե���ͨIO ʹ��
PWR_BackupAccessCmd(DISABLE);//��ֹ�ĺĴ���
OLED_RST_Clr();
delay_ms(100);
OLED_RST_Set();
OLED_WR_Byte(0xAE,OLED_CMD); //�ر���ʾ
OLED_WR_Byte(0xD5,OLED_CMD); //����ʱ�ӷ�Ƶ����,��Ƶ��
OLED_WR_Byte(80,OLED_CMD); //[3:0],��Ƶ����;[7:4],��Ƶ��
OLED_WR_Byte(0xA8,OLED_CMD); //��������·��
OLED_WR_Byte(0X3F,OLED_CMD); //Ĭ��0X3F(1/64)
OLED_WR_Byte(0xD3,OLED_CMD); //������ʾƫ��
OLED_WR_Byte(0X00,OLED_CMD); //Ĭ��Ϊ0
OLED_WR_Byte(0x40,OLED_CMD); //������ʾ��ʼ�� [5:0],����.
OLED_WR_Byte(0x8D,OLED_CMD); //��ɱ�����
OLED_WR_Byte(0x14,OLED_CMD); //bit2,����/�ر�
OLED_WR_Byte(0x20,OLED_CMD); //�����ڴ��ַģʽ
OLED_WR_Byte(0x02,OLED_CMD); //[1:0],00,�е�ַģʽ;01,�е�ַģʽ;10,ҳ��ַģʽ;Ĭ��10;
OLED_WR_Byte(0xA1,OLED_CMD); //���ض�������,bit0:0,0->0;1,0->127;
OLED_WR_Byte(0xC0,OLED_CMD); //����COMɨ�跽��;bit3:0,��ͨģʽ;1,�ض���ģʽ COM[N-1]->COM0;N:����·��
OLED_WR_Byte(0xDA,OLED_CMD); //����COMӲ����������
OLED_WR_Byte(0x12,OLED_CMD); //[5:4]����
OLED_WR_Byte(0x81,OLED_CMD); //�Աȶ�����
OLED_WR_Byte(0xEF,OLED_CMD); //1~255;Ĭ��0X7F (��������,Խ��Խ��)
OLED_WR_Byte(0xD9,OLED_CMD); //����Ԥ�������
OLED_WR_Byte(0xf1,OLED_CMD); //[3:0],PHASE 1;[7:4],PHASE 2;
OLED_WR_Byte(0xDB,OLED_CMD); //����VCOMH ��ѹ����
OLED_WR_Byte(0x30,OLED_CMD); //[6:4] 000,0.65*vcc;001,0.77*vcc;011,0.83*vcc;
OLED_WR_Byte(0xA4,OLED_CMD); //ȫ����ʾ����;bit0:1,����;0,�ر�;(����/����)
OLED_WR_Byte(0xA6,OLED_CMD); //������ʾ��ʽ;bit0:1,������ʾ;0,������ʾ
OLED_WR_Byte(0xAF,OLED_CMD); //������ʾ
OLED_Clear();
}
������OLED������,��Ե���0.96���6��OLED������Ļ,
Ч��չʾͼ
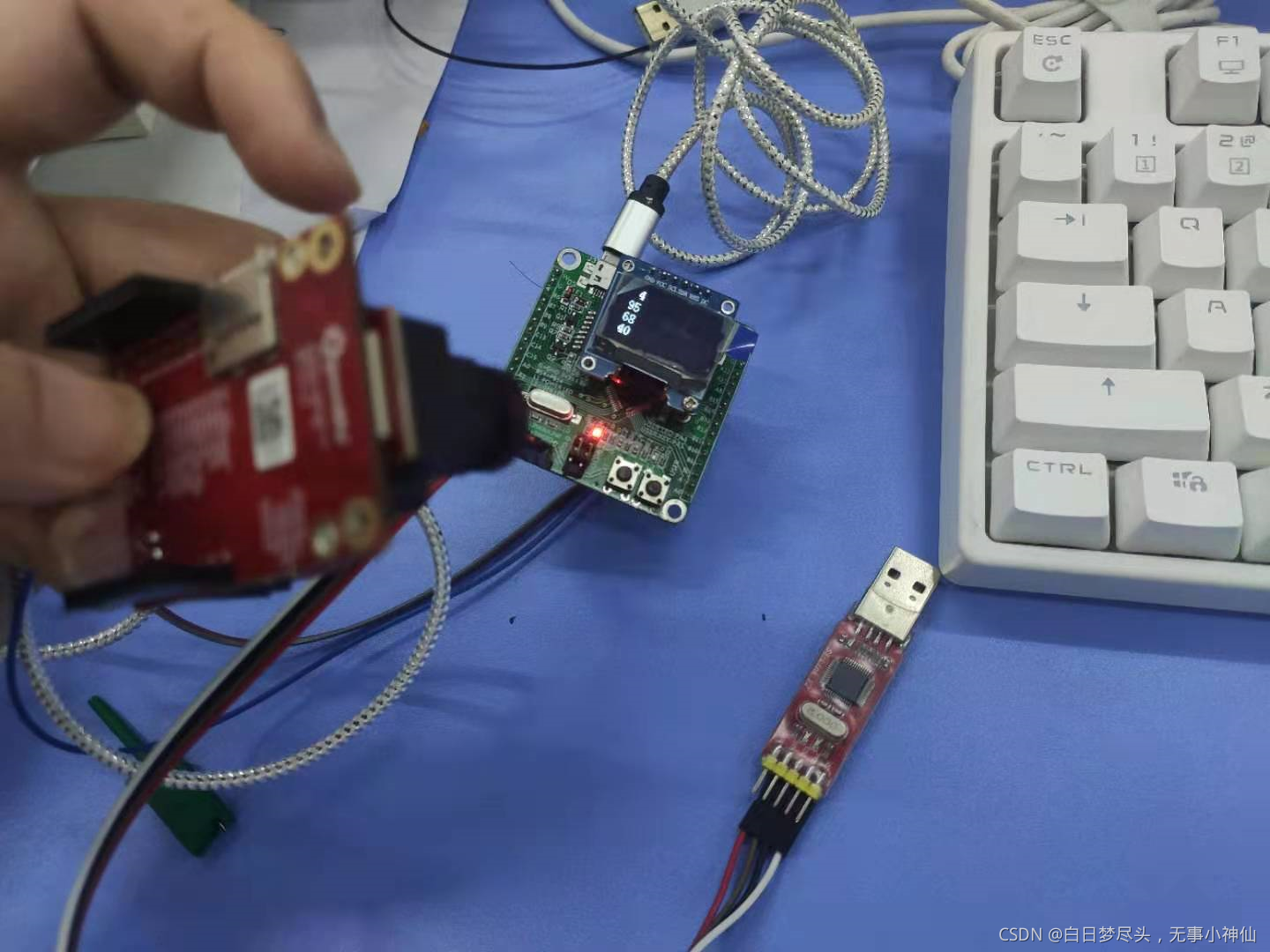 CX,CY,CW,CH����OLED��չ�ֳ���
CX,CY,CW,CH����OLED��չ�ֳ���
���,�о����Լ�д�IJ��Ͳ�զ����,�һ��ǰ��ҵĴ����������Ұ�,
����:https://pan.baidu.com/s/1uObuYJZnwb1hMOb5AYUdQw
��ȡ��:1234
�C���ٶ����̳�����ԱV3�ķ���
���ֳ���д����,ϣ������ܹ�һ����