定时器的Encoder Mode(编码器模式)使用
1、编码器相关知识
1.1 相关编码器的知识点:
机器人开发过程中,对于直流电机来说,编码器至关重要,它不仅可以使我们对电极进行精确的速度闭环,位置闭环,还可以通过时间积分,根据运动学关系,获得速度、位置等信息
STM32的定时器有编码器模式,大大的方便我们的开发。使用STM32cubeMX配置工具,使得这个过程变得无比简单
该笔记中使用STM32cubeMX 开发配置编码器,STM32定时器编码器模式(Encoder Mode),使用定时器TIM4编码器模式读取编码器的值,做闭环控制
1.2 STM32相关定时器编码器模式(Encoder Mode)的知识点:
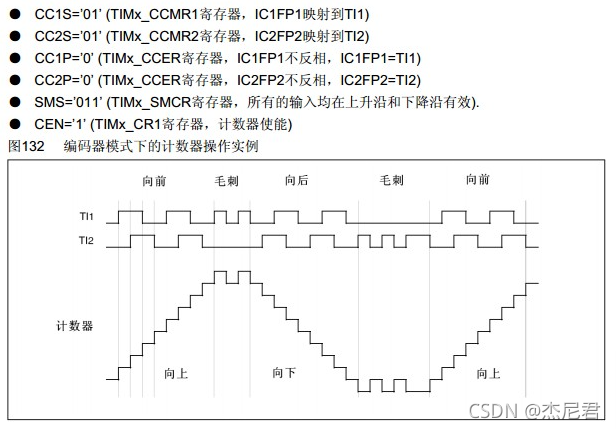
stm32使用手册可以看到如下的配置,和图片。基本上程序也是这样去设置的相关寄存器的。
如果TI1和TI2分别接电机的A相和B相的话,那么,当电机正转的时候,如下图计数器回想上计数,反转的时候会向下计数,注意了这个向下计数并不会出现负的值,依旧是从(0-ARR)计数。
这种模式的好处:1.上升沿和下降沿都会计数,所以被软件4倍频了。2.当某一相有毛刺的时候,计数器会在硬件上停止计数。
2、STM32CubeMX引脚设置和代码生成
2.1 相关STM32CubeMX生成代码配置如下:
2.1.1 配置定时器TIM4的编码器模式
- 1、设置定时器TIM4的
Combined Channels的选项为Encoder Mode,编码器模式; - 2、设置定时器TIM4相关参数:
PSC:0;Counter:65535(设置计数器的值为65535,最大值);
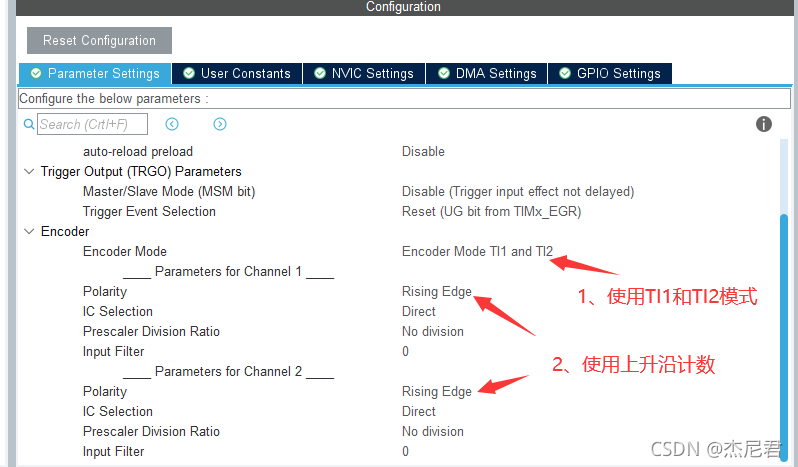
2.1.2 配置定时器TIM4的编码器模式相关参数
- 1、在参数配置中的
Econder Mode中选择Econder Mode TI1 and TI2; - 2、在TI1、TI2的选项中选择Rising Edge上升沿计数;
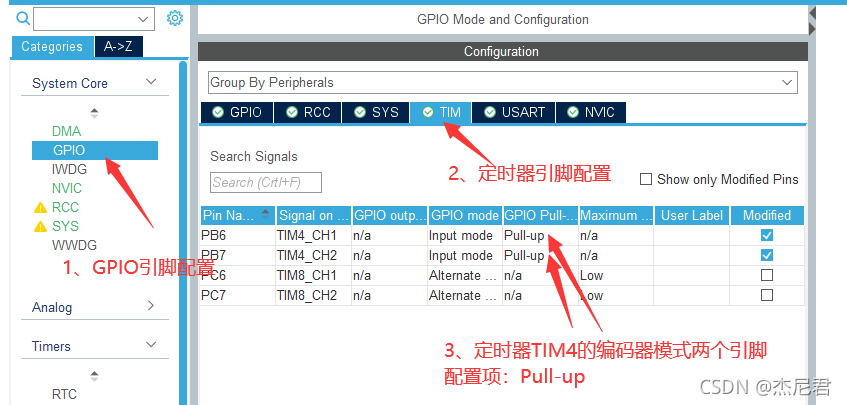
- 3、选择
GPIO模式配置,配置定时器两个GPIO引脚模式,全部改成Pull-Up,即上拉模式,主要用于没有外部上拉的编码器读取时,可以确定引脚电平,防止出错;
配置定时器TIM4的编码器模式

编码器模式配置
定时器引脚设置上拉模式
3、编写相关的C函数文件
3.1、相关定时器的Encoder Mode配置函数开启:
1)添加定时器4的通道1和通道2的Encoder Mode开启使能函数,放置于到main.c中的用户代码区。
定时器TIM4的Encoder Mode(编码器模式)使用的是TIM4的通道1和通道2;
/* USER CODE BEGIN 2 */
HAL_TIM_Encoder_Start(&htim4,TIM_CHANNEL_1 | TIM_CHANNEL_2);
/* USER CODE END 2 */
3.2、编码器数据的读取使用
2)编码器数据的读取使用:
在循环中调用 __HAL_TIM_IS_TIM_COUNTING_DOWN 可以获得当前电机的转向 0为正、1为负;
在循环中调用 __HAL_TIM_GET_COUNTER 获取计数器的计数值,即编码器的脉冲数;
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
int Direction = __HAL_TIM_IS_TIM_COUNTING_DOWN(&htim4); //读取电机转动方向
int CaptureNumber = (short)__HAL_TIM_GET_COUNTER(&htim4); //读取编码器数据
__HAL_TIM_GET_COUNTER(&htim4) = 0; //计数器值重新置位
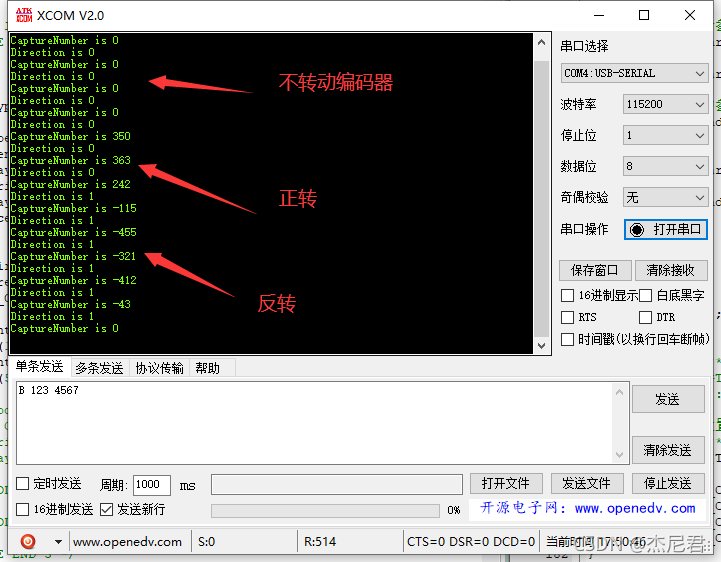
UART1_printf_DMA("Direction is %d \r\n",Direction);
HAL_Delay(10);
UART1_printf_DMA("CaptureNumber is %d \r\n",CaptureNumber);
HAL_Delay(500);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
以下代码与上面代码片相同,直接使用读取寄存器的值,进行读取编码器数据;
int CaptureNumber= (short)TIM4 -> CNT; //读取定时器2的计数值
TIM4 -> CNT=0; //清零计数
UART1_printf_DMA("Encoder_TIM is %d \r\n",CaptureNumber);
HAL_Delay(500);
3.3、使用(short)强制类型转换,编码器数据正负处理
使用(short)强制类型转换,读取编码器数据正负
上面这样传进去要读的定时器,返回的是相关编码器的速度值。但是为什么,会是一个负数呢。计数器只能计数(0-ARR);
注意看上面使用了强制类型转换。把寄存器的值读出来了之后,转换成了short型(2字节,32位系统下),范围为(-32768-32767),此时当我们把计数器的初始值设置为0之后,如果出现反转,它就会从0开始向下计数(0,65535,65534,…)但是经过强制类型转换之后就变成了(0,-1,-2,…)。
short的表示范围(-32768-32767),也就是说当读出来的值为(32767, 32768, 32769,…,65535,65536,65537…)的时候会因为溢出而转换为
(32767,-32768,-32767,…, -1, ,0, , 1)就这样不断地循环下去。所以我们的电机反转的时候读出的数就是反方向的速度值。而不必用65535去减去读出的值再加上负号才可以的到方便观察的值。只需要一个强制类型转换就可以了。
3.4、编码器数据读取函数整理
可以根据下面的代码片改成自己的代码风格
int Read_Encoder(u8 TIMX)
{
int Encoder_TIM;
switch(TIMX)
{
case 2: Encoder_TIM= (short)TIM2 -> CNT; TIM2 -> CNT=0; break;
case 3: Encoder_TIM= (short)TIM3 -> CNT; TIM3 -> CNT=0; break;
case 4: Encoder_TIM= (short)TIM4 -> CNT; TIM4 -> CNT=0; break;
default: Encoder_TIM=0;
}
return Encoder_TIM;
}
4、编译工程文件,使用ST-Link烧录,测试定时器TIM4的Encoder Mode(编码器模式)使用