һ������
- IIC��Inter-Intergrated Circuit(���ɵ�·����),I2C��������һ���������ź���,һ����˫���������SDA,��һ����ʱ����SCL��
- ʱ���߱���������(ͨ��Ϊ������)����,������������ʱ��(SCL)�������ߵĴ��䷽��,��������ʼ��ֹͣ������I2C������������(MCU)�ʹӻ�(Ƭ������,��AT24C02)֮��,�����ж�������Ͷ���ӻ����ӻ���Զ���������������������ݡ�
- ÿ���ӵ�I2C���ߵ��豸����һ��Ψһ�ĵ�ַ,�Ա�������Ѱ�á�
- IIC��ͨ���ٶȷ�Ϊ����:��ģʽ��������:100KHZ,����ģʽ:400KHZ,����ģʽ:3.4MHZ
�����źŸ���
I2Cͨ��,���ڼ����ź�
- ��ʼ�ź�(����):֪ͨ�ӻ�����ͨ�ŵ�����
- Ӧ���ź�:��Ӧ�����Ӧ����Ӧ���ǵ͵�ƽ,��Ӧ���Ǹߵ�ƽ��
- ֹͣ�ź�(����):���ߴӻ�ͨ���Ѿ�������
�����ؼ�ʱ��ͼ
����λ�Ĵ���:������ʱ�ӵ�������ʱ��������,�½���ʱ��������,һ�����ݵĴ������8λ,��λ�ȷ�
���ݵ���Ч��:
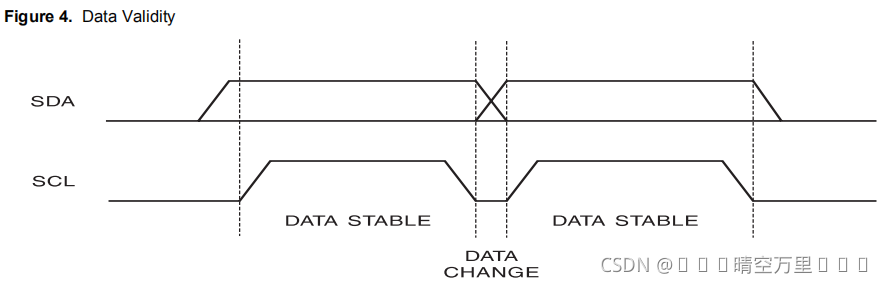
��ͼ��֪:ʱ����Ϊ�ߵ�ƽʱ,�������ϵ����ݲ��ȶ�;ʱ����Ϊ�͵�ƽʱ,�������ϵ����ݸı�
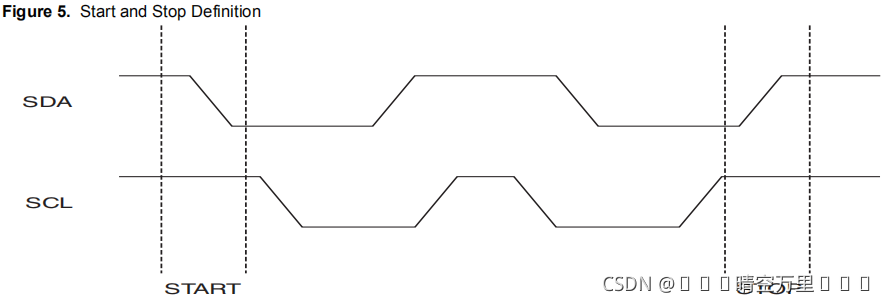
��ʼ��ֹͣ����:
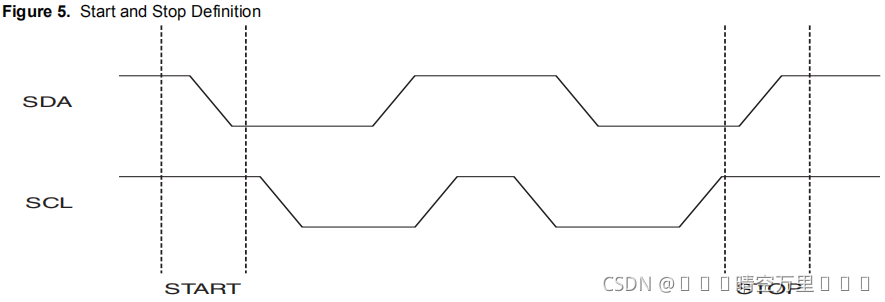
1. ��ʼ����:ʱ���ߴ��ڸߵ�ƽ�ڼ�,�����߲�����һ���½���
2. ֹͣ����:ʱ���ߴ��ڸߵ�ƽ�ڼ�,�����߲�����һ��������
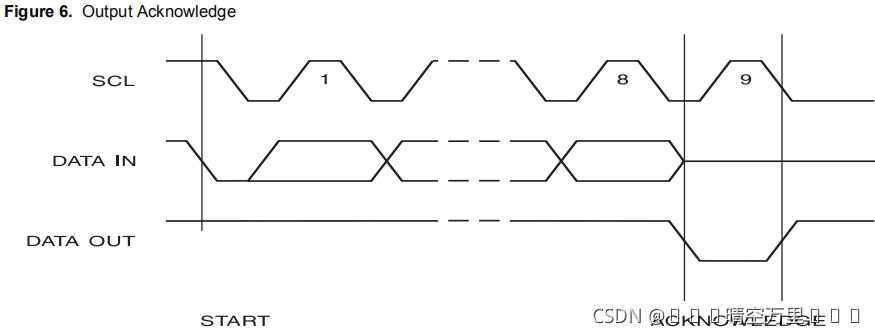
Ӧ���ź�:�жϸոս��յ���������û��������Ӧ,Ӧ��λһ���ǽ��շ���������,���ͺͽ��յ�ʱ�����ͨ��һ��λ����û�����𡣷����ڵ�9��ʱ�����ڡ�
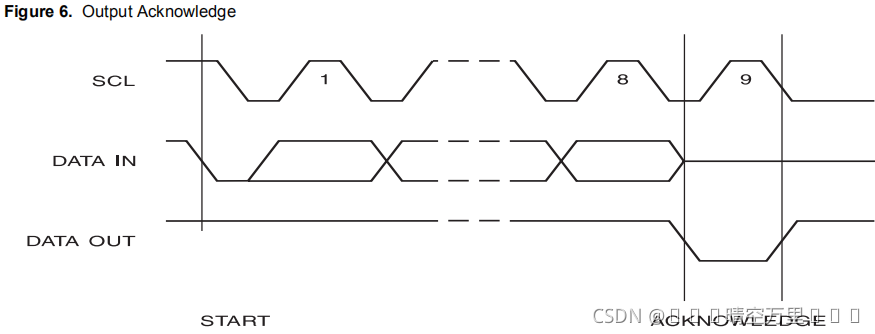
3. ��������һ��Ӧ��λ:�ڵ�9��ʱ������,ʱ�ӵ͵�ƽʱ,������������͵�ƽʱ��Ӧ��,�ߵ�ƽʱ����Ӧ��
- ��������һ��Ӧ��λ:�ڵ�9��ʱ������,ʱ�Ӵӵ͵�ƽ���ߵ�ƽ�仯ʱ,��ȡSDA���ŵĵ�ƽ,��������λ�͵�ƽ��ʱӦ��,�ߵ�ƽʱ����Ӧ��
һ���ֽڵķ��ͺͽ���:
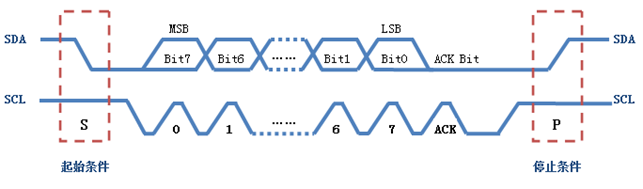
����һ���ֽ�:�ͷ���һ��Ӧ��λ���,forѭ��8�μ���,�ȷ���λ``��
����һ���ֽ�:�ͽ���һ��Ӧ��λ���
ʱ�Ӻ�����ת��:SDA����ͨ��ʹ���ⲿ�豸���ߡ�SDA�����ϵ����ݿ��ܽ���SCL��ʱ�η����仯��SCL���ڼ�����ݱ仯��ָʾ�������ʼ��ֹͣ������
I2C��ͨ�Ų���:
- ��ʼ����
- ����8λ������(����������ַ+д/������)
- �ȴ�Ӧ��λ
- ����������Ӧ���ֽ�����
- ֹͣ����
��������Ǻ��ĸ��ӻ�����ͨ��?
ͨ��IIC�����Դ��ĵ�ַ:һ����7bit��Ӳ����ַ,����1bit�Ķ�дλ
�������������:������ַ+д����(0)
�������������:������ַ+������(1)
�ġ�����ʵ��
��Ҫ��ʱ��ͼ��д
ģ��I2C��ʼ��,
ʹ�õ�����:PB8�CSCL , PB9�CSDA
����ͨ��ʱ����������ߵ͵�ƽ,������Ϊ�������
������ʱͨ�����������������,��ʱ��Ҫ�����������ж�ȡ����,��������Ϊ�������
/*
***************************
��������:I2C��ʼ��
��������:None
��������ֵ:None
����˵��:SCL_PIN--SCL �������
SDA_PIN--SDA �������
***************************
*/
void i2c_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
//PBӲ��ʱ��ʹ��
RCC_AHB1PeriphClockCmd(GPIO_CLK, ENABLE);
//����PB8 pB9���ģʽ
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_Pin = SCL_PIN|SDA_PIN;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_Init(GPIO_PORT, &GPIO_InitStructure);
//��ʱ��ͼ,PB8 PB9����һ����ʼ��ƽ
SCL_W = 1;
SDA_W = 1;
}
����������/������ú���
����Ҫ��ȡSDA�����ϵĵ�ƽʱ,����Ϊ����ģʽ:GPIO_Mode_IN
����Ҫ��SDA�������������ʱ,����Ϊ���ģʽ:GPIO_Mode_OUT
//���������ߵ�����/���
void sda_pin_mode(GPIOMode_TypeDef pin_mode)
{
GPIO_InitTypeDef GPIO_InitStructure;
//���� pB9���ģʽ
GPIO_InitStructure.GPIO_Mode = pin_mode; //�����������ģʽ
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_Pin = SDA_PIN;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_Init(GPIO_PORT, &GPIO_InitStructure);
}
/*
**********************************************************************
��������:iic��ʼ��������
�����β�:u8 delay
��������ֵ:None
��ע:ʱ���߸ߵ�ƽ�ڼ�,�����߲����½���
**********************************************************************
*/
void i2c_start(u8 delay)
{
//��֤SDA����Ϊ���ģʽ
sda_pin_mode(GPIO_Mode_OUT);
SCL_W = 1;
SDA_W = 1;
delay_us(delay); //��ʼ�����Ľ���ʱ��
SDA_W = 0;
delay_us(delay);//��ʼ������ά��ʱ��
SCL_W = 0;
delay_us(delay); //ǯסI2C����,�����ͻ��������
}
��ʼ�����ͽ���������ʱ��ͼ
/*
**********************************************************************
��������:iicֹͣ��������
�����β�:u8 delay
��������ֵ:None
��ע:ʱ���߸ߵ�ƽ�ڼ�,�����߲���������
**********************************************************************
*/
void i2c_stop(u8 delay)
{
//��֤SDA����Ϊ���ģʽ
sda_pin_mode(GPIO_Mode_OUT);
SCL_W = 1;
SDA_W = 0;
delay_us(delay);
SDA_W = 1; //����I2C���߽����ź�
delay_us(delay);
}
/*
**********************************************************************
��������:��������Ӧ���ź�
�����β�:u8 ack,u8 delay
��������ֵ:None
**********************************************************************
*/
void i2c_send_ack(u8 ack,u8 delay)
{
//��֤SDA����Ϊ���ģʽ
sda_pin_mode(GPIO_Mode_OUT);
SCL_W=0;
//�ȸ���SDA���ŵĵ�ƽ
if(ack)
{
SDA_W = 1; //��Ӧ��
}
else
{
SDA_W = 0; //Ӧ��
}
delay_us(delay);//����������Ҫ��ʱ��
SCL_W=1;
delay_us(delay);//����������Ҫ��ʱ��
SCL_W=0;
delay_us(delay);//��֤һ������������
}
����Ӧ��λ�ͽ���Ӧ��λ��ʱ��ͼ
/*
**********************************************************************
��������:��������Ӧ���ź�
�����β�:u8 delay
��������ֵ:���յ���Ӧ���ź�
**********************************************************************
*/
u8 i2c_recv_ack(u8 delay)
{
u8 ack = 0;
//��֤SDA����Ϊ����ģʽ
sda_pin_mode(GPIO_Mode_IN);
SCL_W = 1; //ʱ����Ϊ�ߵ�ƽʱ,���ܶ�ȡSDA�����ȶ��ĵ�ƽ
delay_us(delay);
//��ȡSDA���ŵĵ�ƽ
if(SDA_R) ack = 1; //��Ӧ���ź�
else ack = 0; //��Ӧ���ź�
SCL_W = 0; //������æ��״̬
delay_us(delay);
return ack;
}
����һ���ֽ�:�ͷ���һ��Ӧ��λ���,forѭ��8�μ���,�ȷ���λ``��
/*
**********************************************************************
��������:��������һ���ֽ�����,�ٽ���һ��Ӧ���źź���
�����β�:�����͵�����,u8 delay
��������ֵ:���յ���Ӧ���ź�
��ע:0:Ӧ�� 1:��Ӧ�� 8bit �ȸߺ��
**********************************************************************
*/
u8 i2c_send_byte(u8 byte,u8 delay)
{
u8 ack;
int i = 0;
//��֤SDA����Ϊ���ģʽ
sda_pin_mode(GPIO_Mode_OUT);
//���λ���ȴ���,1�ֽ�=8λ
for(i=7;i>=0;i--)
{
SCL_W = 0;
//�ȸ���SDA���ŵĵ�ƽ
if(byte & (1<<i)) //�ж�bitλΪ1
{
SDA_W = 1;
}
else
{
SDA_W = 0;
}
delay_us(5);
SCL_W = 1;
delay_us(5); //���ָߵ�ƽ
SCL_W = 0; //ʱ����Ϊ�͵�ƽʱ,���ܱ������,������һλ����
delay_us(5);
}
//SCL_W = 0;
ack = i2c_recv_ack(delay);
return ack;
}
/*
**********************************************************************
��������:��������һ���ֽ�����,�ٷ���һ��Ӧ���źź���
�����β�:�����͵�Ӧ��,u8 delay
��������ֵ:���յ�������
��ע:0:Ӧ�� 1:��Ӧ�� 8bit �ȸߺ��
**********************************************************************
*/
u8 i2c_recv_byte(u8 ack,u8 delay)
{
u8 d = 0;
int i;
//��֤SDA����Ϊ����ģʽ
sda_pin_mode(GPIO_Mode_IN);
for(i=7; i>=0; i--)
{
SCL_W = 1;
delay_us(delay);
if(SDA_R)
d|=1<<i;
SCL_W = 0;
delay_us(delay);
}
// SCL_W = 1;//ERR
i2c_send_ack(ack,delay);
return d;
}