Ŀ¼
��.��װSTM32CubeMX,�STM32�Ŀ�������
һ.����ͨ�ź�RS-232��
1.����ͨ��
����������ͨ�Žӿ�,�书������Ϊ CPU �ʹ����豸��ı���ת�����������ݴ� CPU �������ж˿ڷ��ͳ�ȥʱ,�ֽ�����ת��Ϊ���е�λ;�ڽ�������ʱ,���е�λ��ת��Ϊ�ֽ����ݡ�
����ͨ��ָ���ڰ�λ���ͺͽ����ֽڡ��ڴ���ͨ����,���õ�Э�����RS-232��RS-422��RS-485������ͨ������Ҫ�IJ����Dz����ʡ�����λ��ֹͣλ����żУ�顣
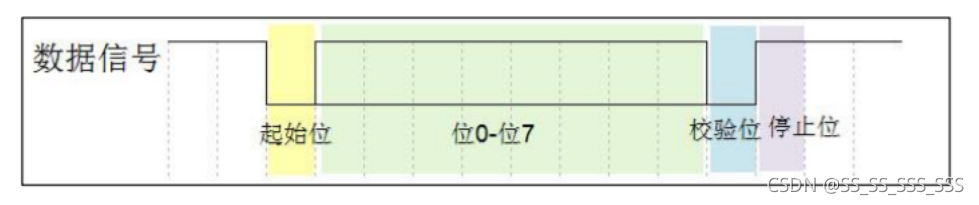
������
����һ���������Ŵ������ʵIJ�����ָ�����źű������Ժ��ڵ�λʱ���ڵı仯,����λʱ�����ز������仯�Ĵ�����
����λ
���Ǻ���ͨ����ʵ������λ�IJ����������������һ����Ϣ��,ʵ�ʵ���������������8λ��,����ֵ��6��7��8λ���������ȡ�������봫�͵���Ϣ��
ֹͣλ
���ڱ�ʾ�����������һλ�����͵�ֵΪ1,1.5��2λ�������������ڴ������϶�ʱ��,����ÿһ���豸�����Լ���ʱ��,�ܿ�����ͨ������̨�豸��������СС�IJ�ͬ�������ֹͣλ�������DZ�ʾ����Ľ���,�����ṩ�����У��ʱ��ͬ���Ļ��ᡣ������ֹͣλ��λ��Խ��,��ͬʱ��ͬ�������̶̳�Խ��,�������ݴ�����ͬʱҲԽ����
��żУ��
��У��Ҫ����Ч���ݺ�У��λ�С�1���ĸ���Ϊ����,����һ��8λ������Ч����Ϊ:01101001,��ʱ����4����1��,Ϊ�ﵽ��У��Ч��,У��λΪ��1��,��������8λ��Ч���ݼ�1λУ��λ,��9λ��żУ��պ��෴,Ҫ����Ч���ݺ�У��λ�ġ�1������Ϊż��,���ʱΪ�ﵽżУ��Ч��,У��λΪ��0������0У����������Ч��������ʲô��������,У��λ����Ϊ��0��,1У��У��λ����Ϊ��1����
2.RS-232��
RS-232���ӿ��dz��õĴ���ͨ�Žӿڱ�֮һ��RS232�����õĽӿ���9���25���D�Ͳ�ͷ,���õ�һ����9���ͷ��?
RS-232����-12~3V��Ϊ1,��+3V~+15V��Ϊ0��
TTL��������͵�ƽҪС��0.8V,�ߵ�ƽҪ����2.4V������,����1.2V����Ϊ��0,����2.0����Ϊ��1��
���� RS-232��ƽ�����źŲ���ֱ�ӱ� ������ֱ��ʶ��,������Щ�źŻᾭ��һ������ƽת��оƬ��ת���ɿ�������ʶ��� ��TTL �����ĵ�ƽ�ź�,����ʵ��ͨѶ��??
��.��װSTM32CubeMX,�STM32�Ŀ�������
1.��װjdk
����STM32CubeMX��Javaʵ�ֵ�,��Ҫ��װjdk������
jdk������������:Java Downloads | Oracle
ѡWindows������:

�����װ�ܼ�,���Ű�װ����һ��һ����װ��ȥ�Ϳ����ˡ��������Ѿ���װ�����,���ԾͲ���ͼ���岽���ˡ�
2.��װSTM32CubeMX
��������:
STM32CubeMX - STM32Cube initialization code generator - STMicroelectronics
2.1�Թ���Ա�������в���װ SetupSTM32CubeMX-4.27.0.exe ,����������������,���Next?

?2.2���"I accept the terms of this license agreement",����ѡ��Next
?2.3ѡ��װλ��,��װλ�ò�Ҫ��������,��Ȼ���ܳ������⡣ѡ��ð�װλ�ú�,���next
2.4?������һ��,���next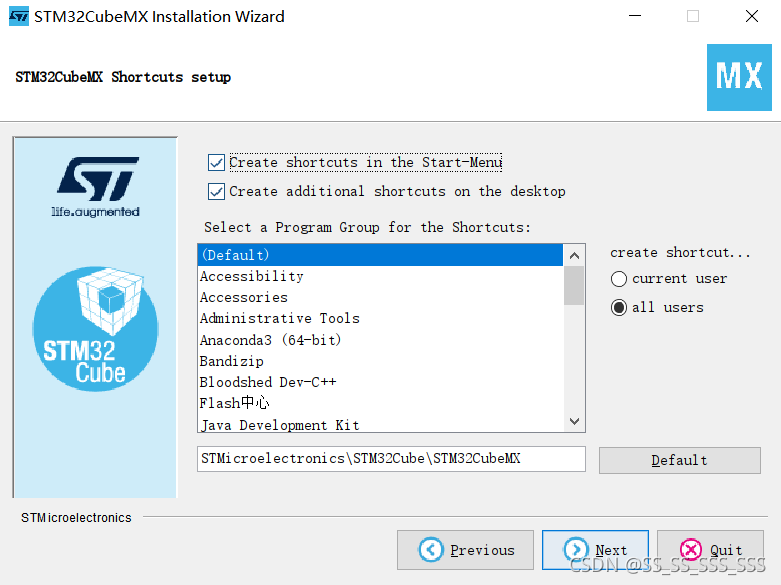
?2.5Ȼ��ȴ���װ���

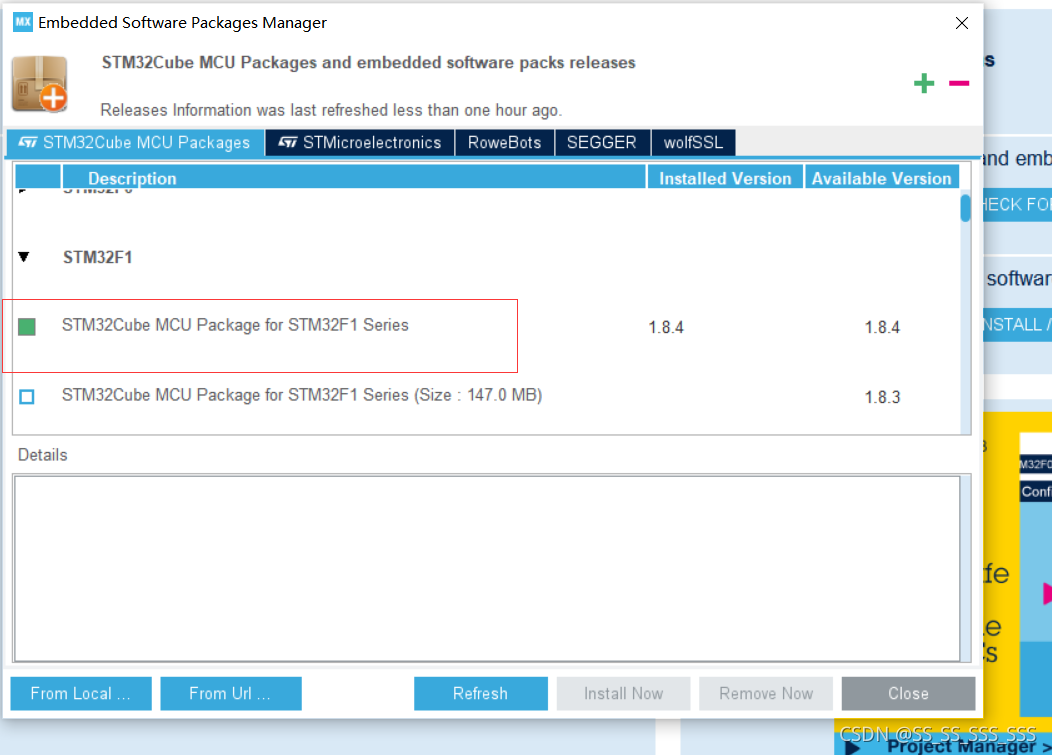
3.��װ�̼���?
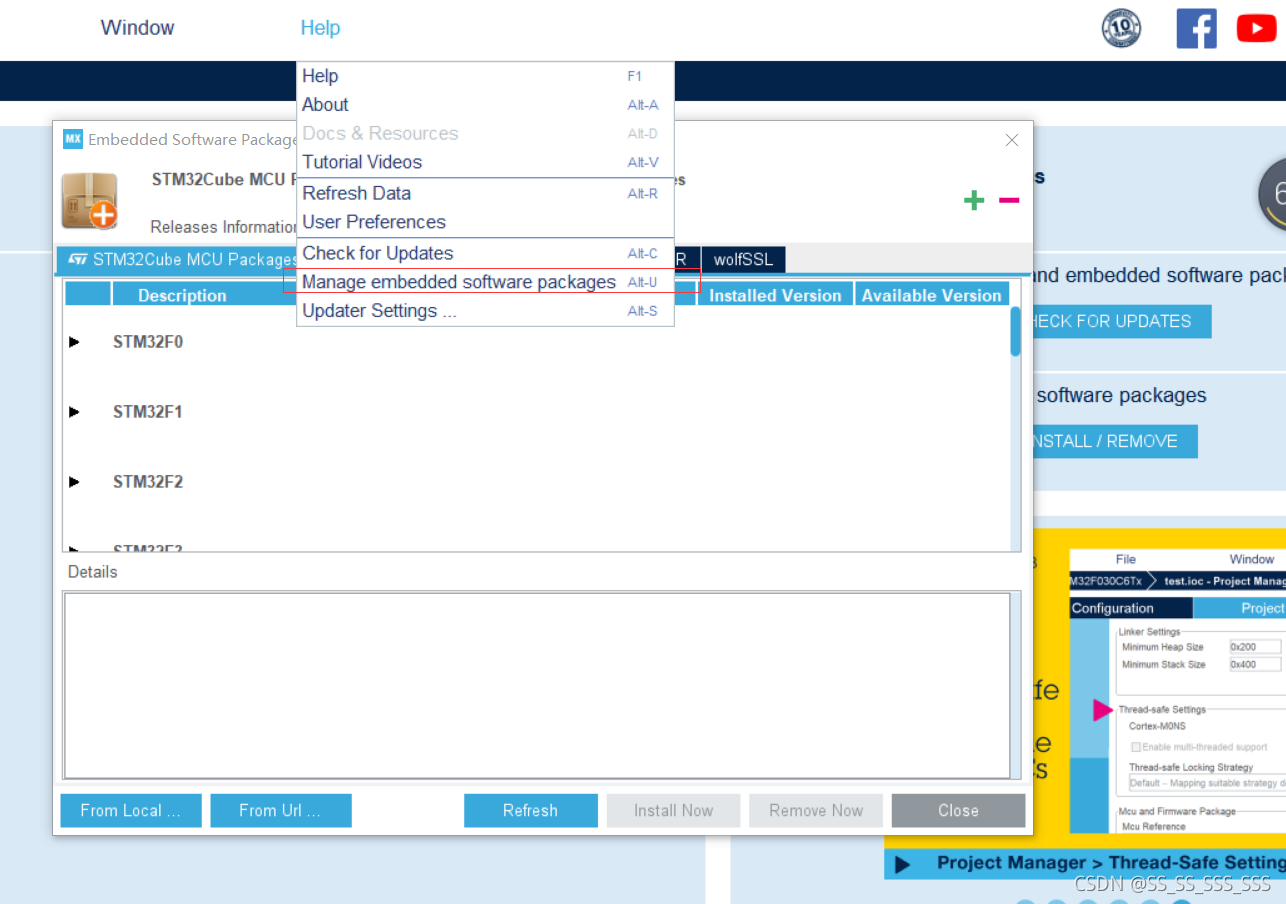
3.1��STM32cubemx,ѡ�� Help->Magne ��װ�̼���
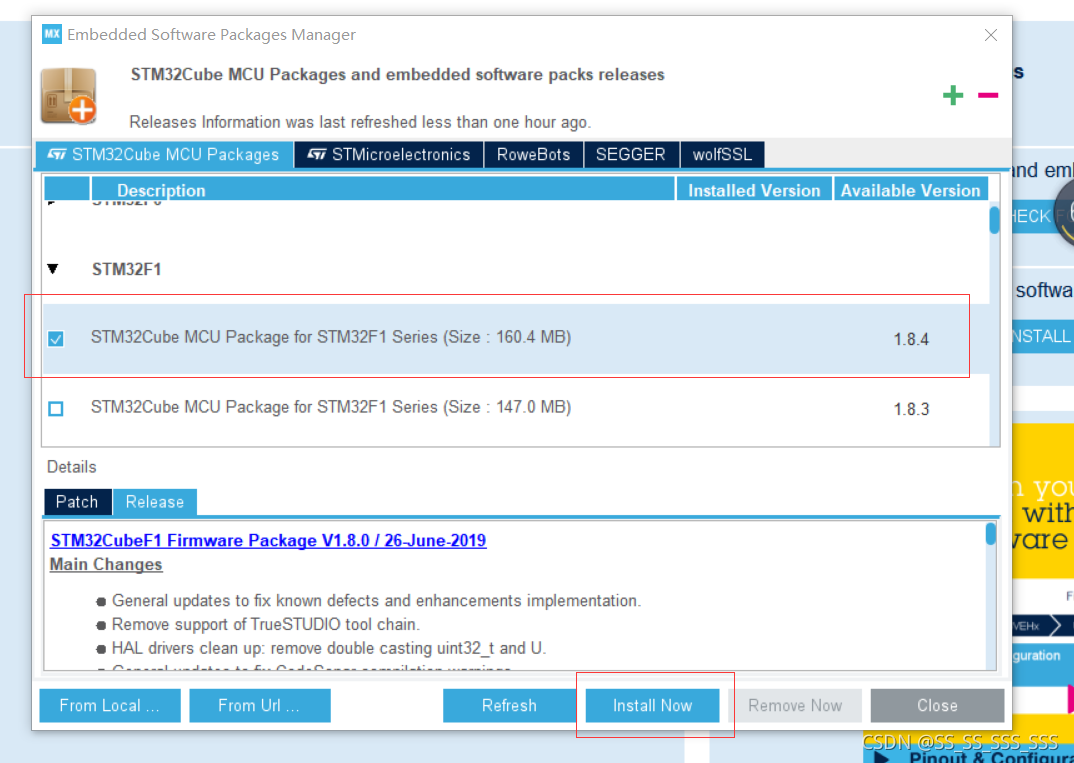
?3.2ѡ��F1ϵ���µİ�װ��,���Install Now
?3.3�ȴ�����,������ɺ������̿�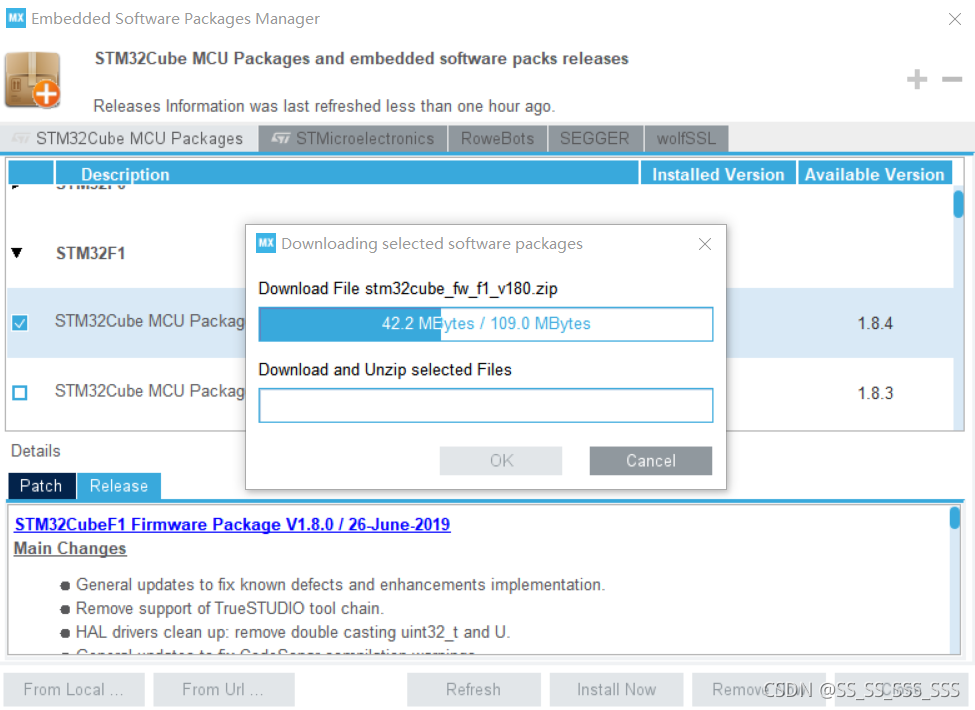
��.LED��ˮ��
1.�½�����
1.1���new?project
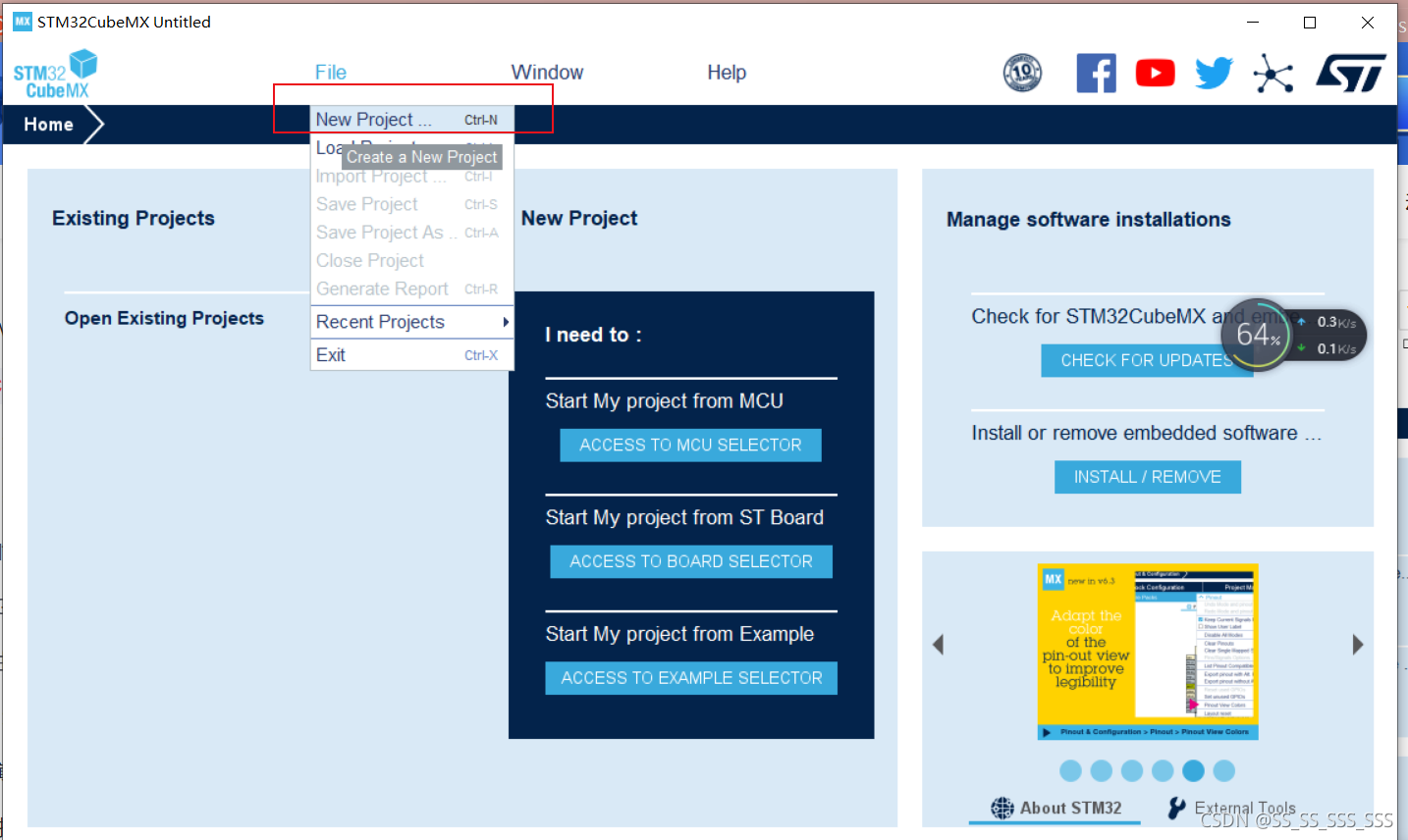
?1.2ѡ��STM32F103C8оƬ
?1.3���System Core,˫��SYS,��Debug��ѡSerial Wire

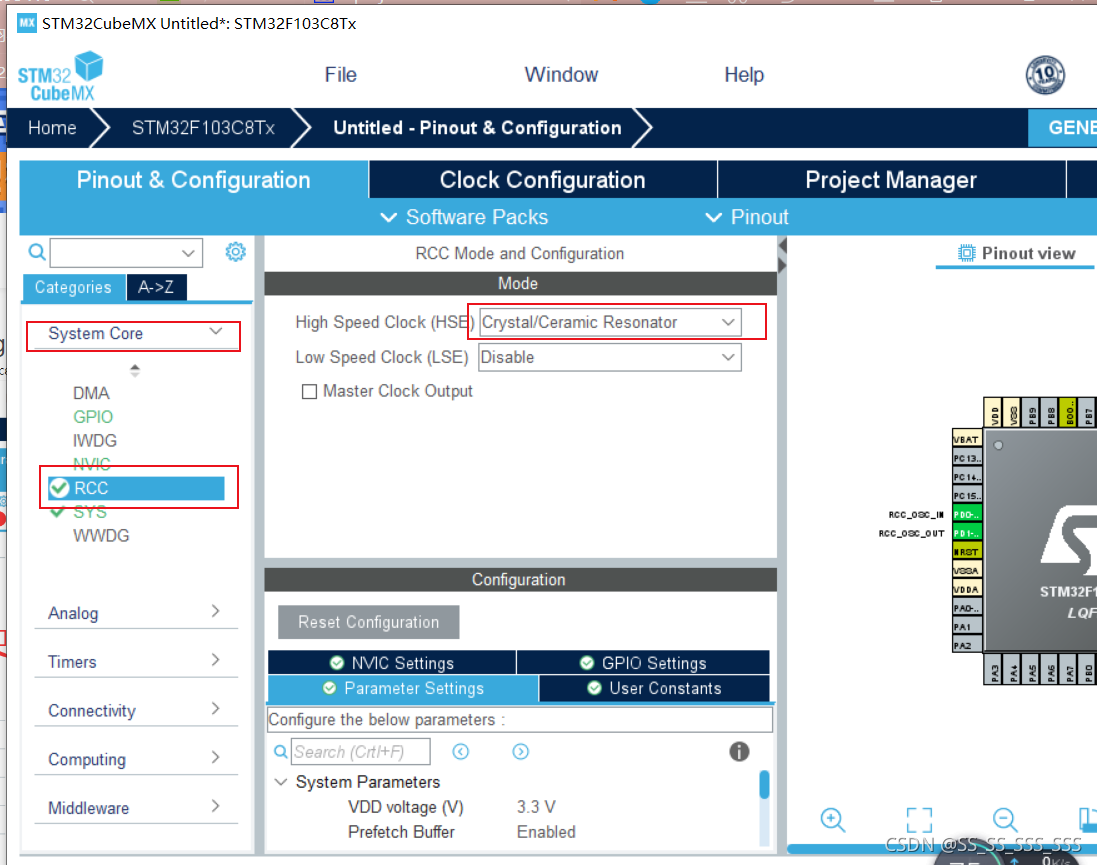
?1.4���System Core,˫��RCC,��High Speed Clock(HSE)��ѡCrystal/Ceramic Resonator
?1.5��Clock Configuration��HSI��ΪPLLOCK,ѡ��ʱ��Ƶ��Ϊ72M,������ɺس�����
?1.6��Pinout&Configuration��,����PA12,PB1,PC14����,ѡ��GPIO_Output,�������š�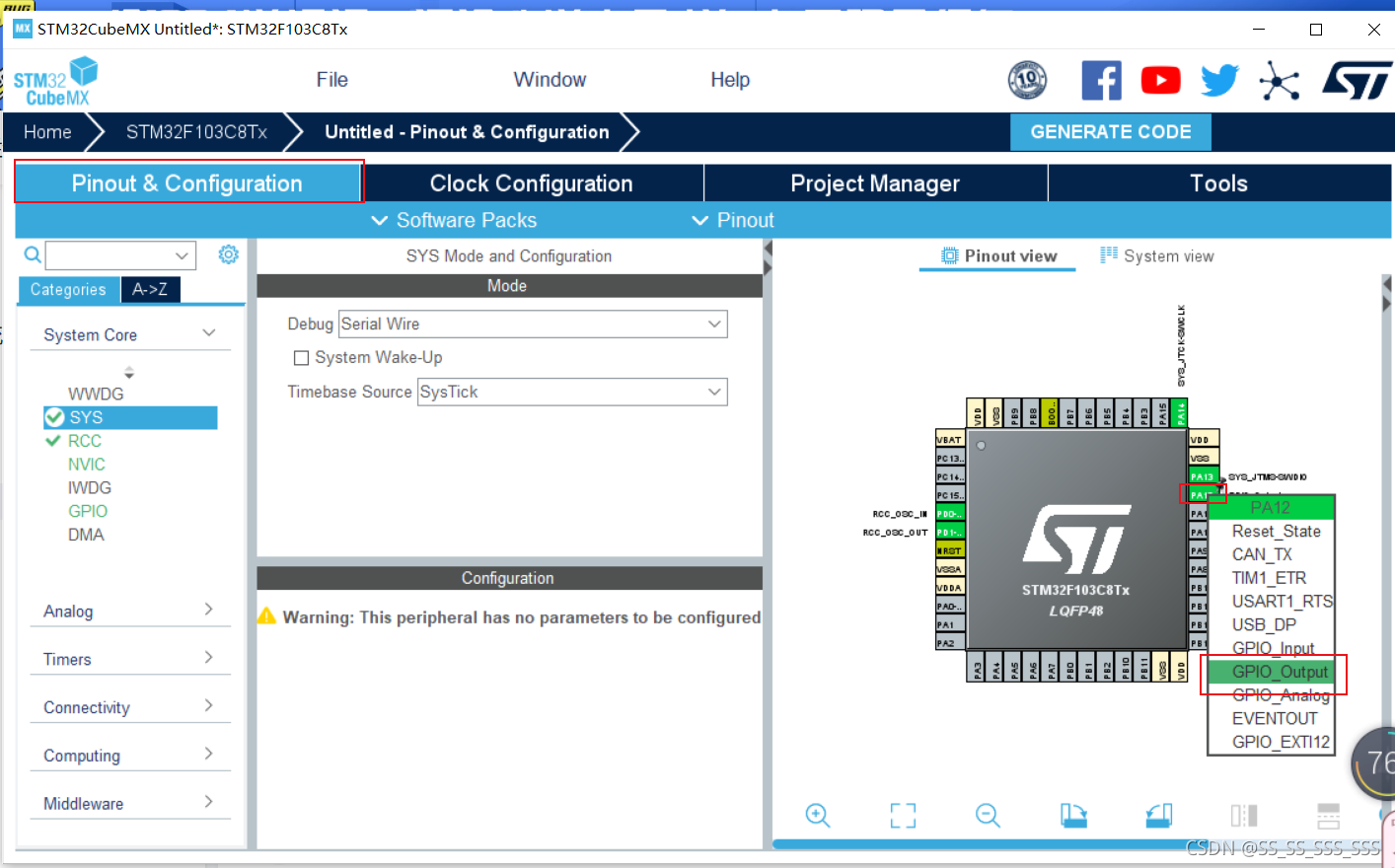

?1.7���Pinout&Configuration��System Core? GPIO���ҵ������õ���������,GPIO output level:��low��high����ѡ��,һ��ѡ��low��

?1.8������Ŀ,��Project Manager�CProject��,������Ŀ���ƺ���Ŀ��ַ(��Ҫ������·��!!��Ȼ���ܻ����),��Toolchain/IDEѡ��MDK-ARM��
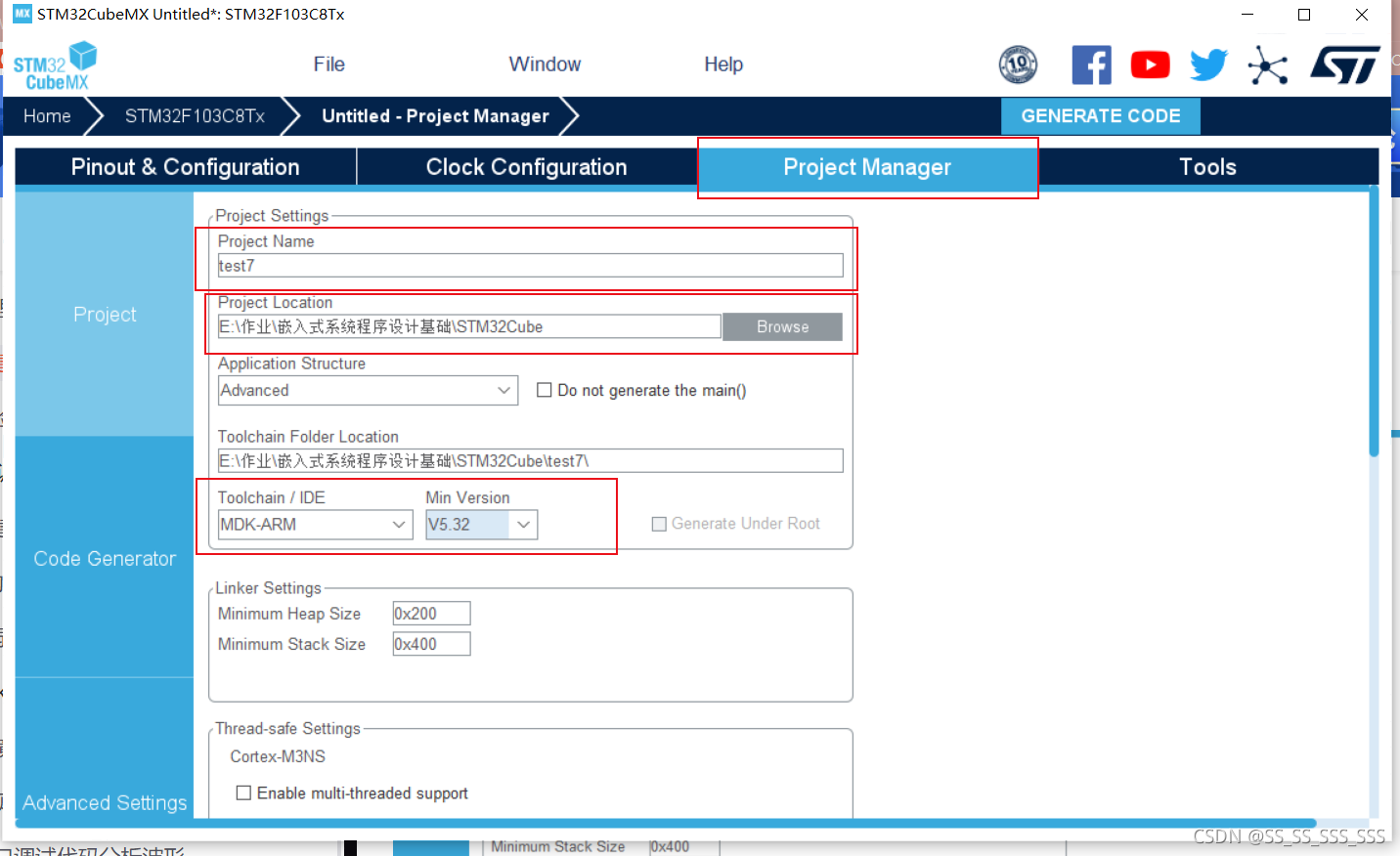
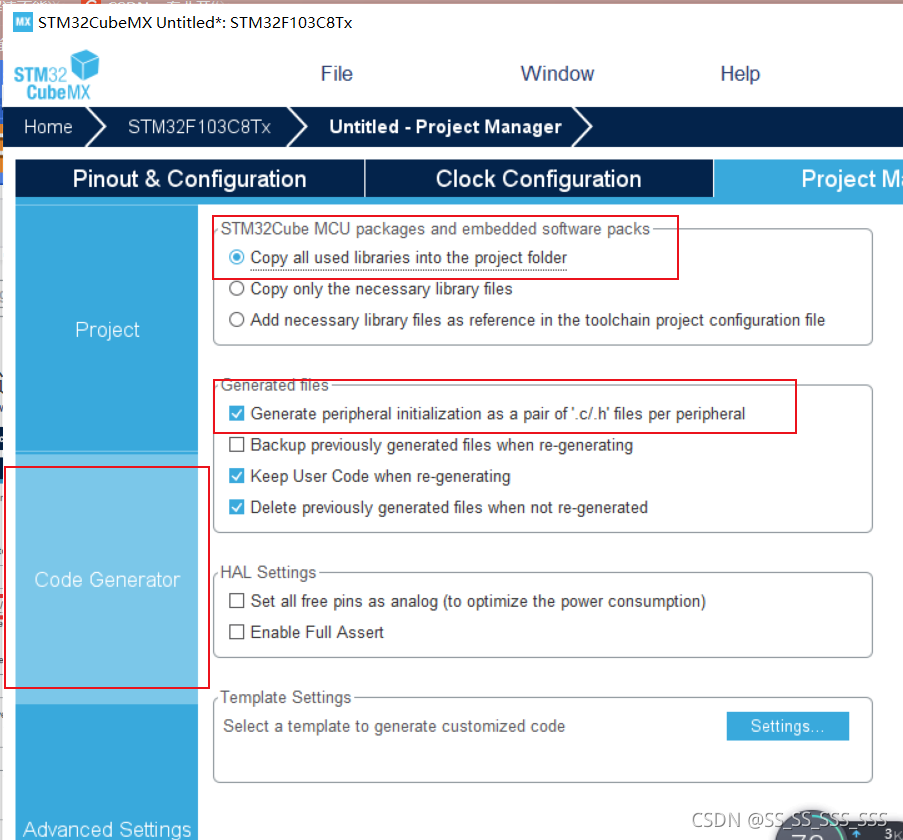
?1.9���code generate,ѡ�����ɳ�ʼ��.c/.h�ļ���
?1.10���generate code���ɴ��벢���ļ���

2.main.c
��main.c,��whileѭ���м�������Ϩ�ƴ��롣STM32CubeMX���ɵĹ��������Ӵ���Ҫ��?/* USER CODE BEGIN?/��/?USER CODE END*/֮�����Ӵ���,����STM32CubeMX�������ɴ���ʱ���Ὣ�Լ����ӵĴ���ɾ������
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_12,GPIO_PIN_SET);//PA12Ϩ��
HAL_Delay(500);//��ʱ0.5s
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_12,GPIO_PIN_RESET);//PA12����
HAL_Delay(500);//��ʱ0.5s
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_1,GPIO_PIN_SET);//PB1Ϩ��
HAL_Delay(500);//��ʱ0.5s
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_1,GPIO_PIN_RESET);//PB1����
HAL_Delay(500);//��ʱ0.5s
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_14,GPIO_PIN_SET);//PC14Ϩ��
HAL_Delay(500);//��ʱ0.5s
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_14,GPIO_PIN_RESET);//PC14����
HAL_Delay(500);//��ʱ0.5s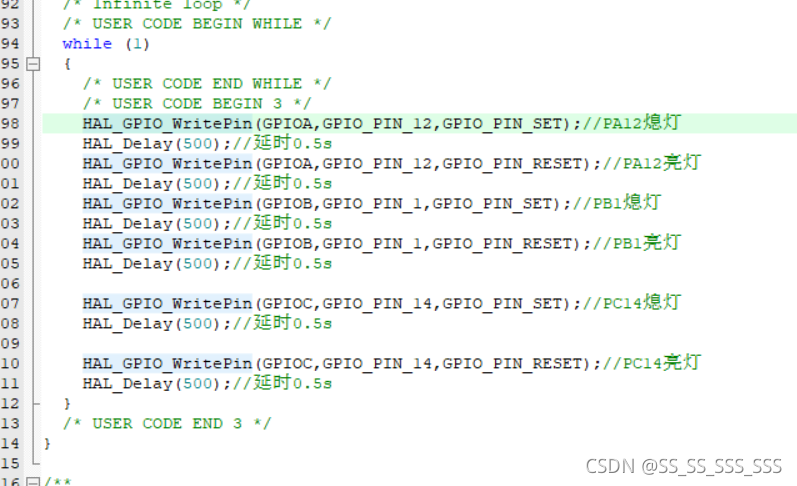
?���벢����hex�ļ�

?�����ļ�ѡ��ո����ɵ�hex�ļ�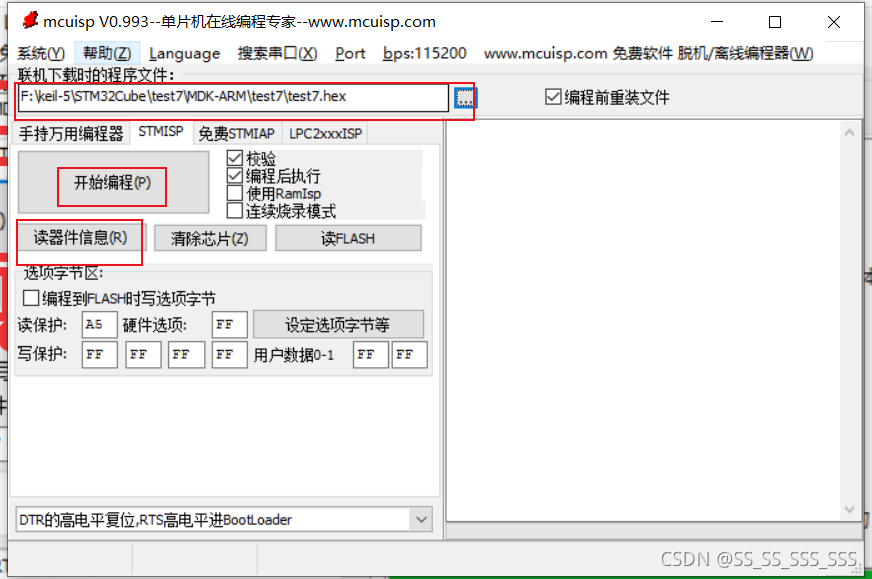
��������ƪ������ͬ,�ٴξͲ����ˡ�������Ҫǿ������,�Ƶĸ����ӵ�ʱ,Ҫ���߽���LED����������5�����,��Ȼ�ƾͲ�������
3.ʵ��Ч��

��.USART����ͨѶ����
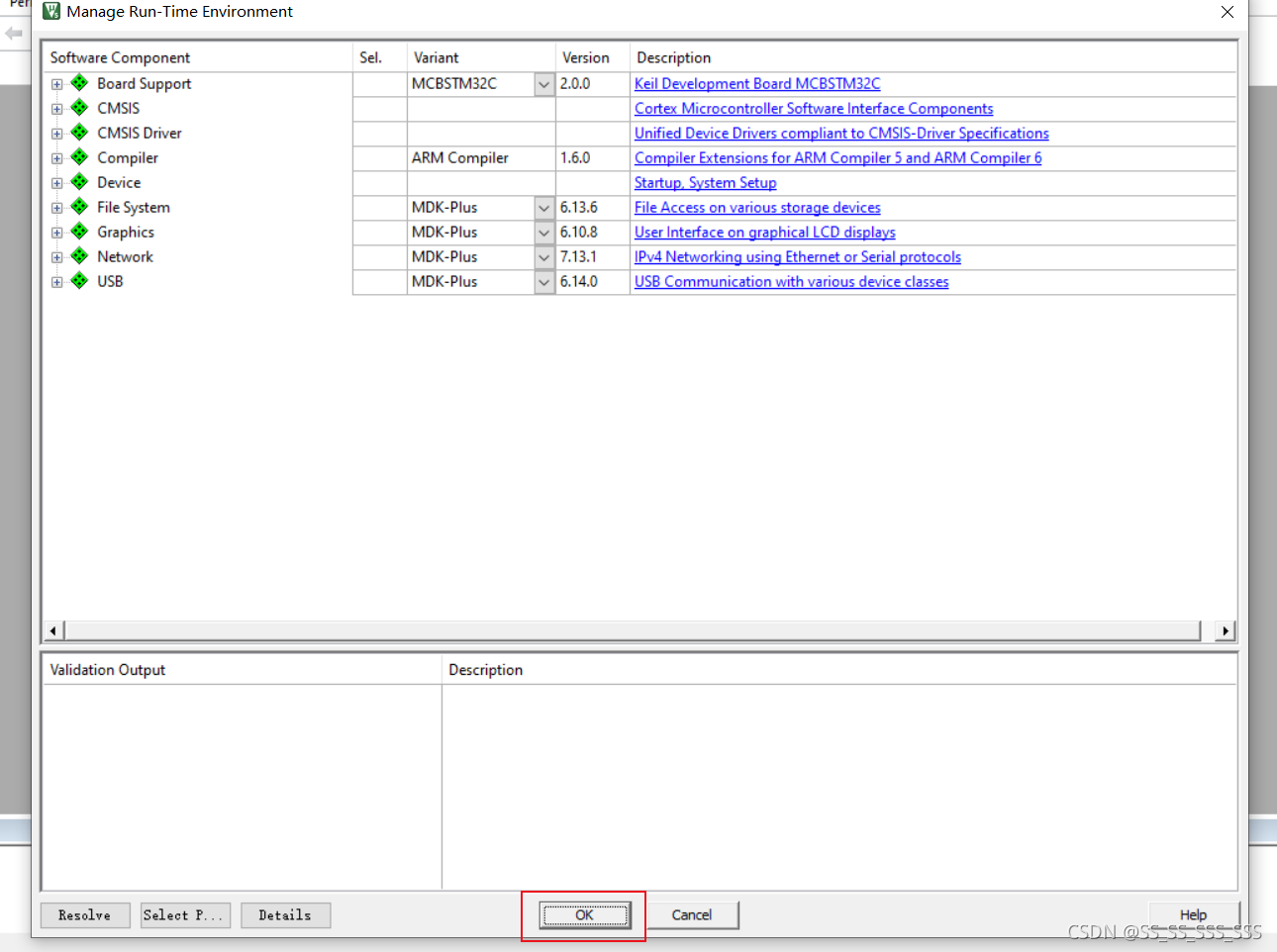
1.�½�����

?�����벻��Ҫ��ѡStartup��CORE
����Դ�ļ�?
 ?
?
2.������
;RCC�Ĵ�����ַӳ��
RCC_BASE EQU 0x40021000
RCC_CR EQU (RCC_BASE + 0x00)
RCC_CFGR EQU (RCC_BASE + 0x04)
RCC_CIR EQU (RCC_BASE + 0x08)
RCC_APB2RSTR EQU (RCC_BASE + 0x0C)
RCC_APB1RSTR EQU (RCC_BASE + 0x10)
RCC_AHBENR EQU (RCC_BASE + 0x14)
RCC_APB2ENR EQU (RCC_BASE + 0x18)
RCC_APB1ENR EQU (RCC_BASE + 0x1C)
RCC_BDCR EQU (RCC_BASE + 0x20)
RCC_CSR EQU (RCC_BASE + 0x24)
;AFIO�Ĵ�����ַӳ��
AFIO_BASE EQU 0x40010000
AFIO_EVCR EQU (AFIO_BASE + 0x00)
AFIO_MAPR EQU (AFIO_BASE + 0x04)
AFIO_EXTICR1 EQU (AFIO_BASE + 0x08)
AFIO_EXTICR2 EQU (AFIO_BASE + 0x0C)
AFIO_EXTICR3 EQU (AFIO_BASE + 0x10)
AFIO_EXTICR4 EQU (AFIO_BASE + 0x14)
;GPIOA�Ĵ�����ַӳ��
GPIOA_BASE EQU 0x40010800
GPIOA_CRL EQU (GPIOA_BASE + 0x00)
GPIOA_CRH EQU (GPIOA_BASE + 0x04)
GPIOA_IDR EQU (GPIOA_BASE + 0x08)
GPIOA_ODR EQU (GPIOA_BASE + 0x0C)
GPIOA_BSRR EQU (GPIOA_BASE + 0x10)
GPIOA_BRR EQU (GPIOA_BASE + 0x14)
GPIOA_LCKR EQU (GPIOA_BASE + 0x18)
;GPIO C�ڿ���
GPIOC_BASE EQU 0x40011000
GPIOC_CRL EQU (GPIOC_BASE + 0x00)
GPIOC_CRH EQU (GPIOC_BASE + 0x04)
GPIOC_IDR EQU (GPIOC_BASE + 0x08)
GPIOC_ODR EQU (GPIOC_BASE + 0x0C)
GPIOC_BSRR EQU (GPIOC_BASE + 0x10)
GPIOC_BRR EQU (GPIOC_BASE + 0x14)
GPIOC_LCKR EQU (GPIOC_BASE + 0x18)
;����1����
USART1_BASE EQU 0x40013800
USART1_SR EQU (USART1_BASE + 0x00)
USART1_DR EQU (USART1_BASE + 0x04)
USART1_BRR EQU (USART1_BASE + 0x08)
USART1_CR1 EQU (USART1_BASE + 0x0c)
USART1_CR2 EQU (USART1_BASE + 0x10)
USART1_CR3 EQU (USART1_BASE + 0x14)
USART1_GTPR EQU (USART1_BASE + 0x18)
;NVIC�Ĵ�����ַ
NVIC_BASE EQU 0xE000E000
NVIC_SETEN EQU (NVIC_BASE + 0x0010)
;SETENA�Ĵ������е���ʼ��ַ
NVIC_IRQPRI EQU (NVIC_BASE + 0x0400)
;�ж����ȼ��Ĵ������е���ʼ��ַ
NVIC_VECTTBL EQU (NVIC_BASE + 0x0D08)
;������ƫ�ƼĴ����ĵ�ַ
NVIC_AIRCR EQU (NVIC_BASE + 0x0D0C)
;Ӧ�ó����жϼ���λ���ƼĴ����ĵ�ַ
SETENA0 EQU 0xE000E100
SETENA1 EQU 0xE000E104
;SysTick�Ĵ�����ַ
SysTick_BASE EQU 0xE000E010
SYSTICKCSR EQU (SysTick_BASE + 0x00)
SYSTICKRVR EQU (SysTick_BASE + 0x04)
;FLASH����Ĵ�����ַӳ��
FLASH_ACR EQU 0x40022000
;SCB_BASE EQU (SCS_BASE + 0x0D00)
MSP_TOP EQU 0x20005000
;����ջ��ʼֵ
PSP_TOP EQU 0x20004E00
;���̶�ջ��ʼֵ
BitAlias_BASE EQU 0x22000000
;λ����������ʼ��ַ
Flag1 EQU 0x20000200
b_flas EQU (BitAlias_BASE + (0x200*32) + (0*4))
;λ��ַ
b_05s EQU (BitAlias_BASE + (0x200*32) + (1*4))
;λ��ַ
DlyI EQU 0x20000204
DlyJ EQU 0x20000208
DlyK EQU 0x2000020C
SysTim EQU 0x20000210
;��������
Bit0 EQU 0x00000001
Bit1 EQU 0x00000002
Bit2 EQU 0x00000004
Bit3 EQU 0x00000008
Bit4 EQU 0x00000010
Bit5 EQU 0x00000020
Bit6 EQU 0x00000040
Bit7 EQU 0x00000080
Bit8 EQU 0x00000100
Bit9 EQU 0x00000200
Bit10 EQU 0x00000400
Bit11 EQU 0x00000800
Bit12 EQU 0x00001000
Bit13 EQU 0x00002000
Bit14 EQU 0x00004000
Bit15 EQU 0x00008000
Bit16 EQU 0x00010000
Bit17 EQU 0x00020000
Bit18 EQU 0x00040000
Bit19 EQU 0x00080000
Bit20 EQU 0x00100000
Bit21 EQU 0x00200000
Bit22 EQU 0x00400000
Bit23 EQU 0x00800000
Bit24 EQU 0x01000000
Bit25 EQU 0x02000000
Bit26 EQU 0x04000000
Bit27 EQU 0x08000000
Bit28 EQU 0x10000000
Bit29 EQU 0x20000000
Bit30 EQU 0x40000000
Bit31 EQU 0x80000000
;������
AREA RESET, DATA, READONLY
DCD MSP_TOP ;��ʼ������ջ
DCD Start ;�����
DCD NMI_Handler ;NMI Handler
DCD HardFault_Handler ;Hard Fault Handler
DCD 0
DCD 0
DCD 0
DCD 0
DCD 0
DCD 0
DCD 0
DCD 0
DCD 0
DCD 0
DCD 0
DCD SysTick_Handler ;SysTick Handler
SPACE 20 ;Ԥ���ռ�20�ֽ�
;�����
AREA |.text|, CODE, READONLY
;������ʼ
ENTRY
;ָʾ��������↑ʼִ��
Start
;ʱ��ϵͳ����
ldr r0, =RCC_CR
ldr r1, [r0]
orr r1, #Bit16
str r1, [r0]
;�����ⲿ����ʹ��
;�����ⲿ8M����
ClkOk
ldr r1, [r0]
ands r1, #Bit17
beq ClkOk
;�ȴ��ⲿ�������
ldr r1,[r0]
orr r1,#Bit17
str r1,[r0]
;FLASH������
ldr r0, =FLASH_ACR
mov r1, #0x00000032
str r1, [r0]
;����PLL�������Ϊ7,HSE���벻��Ƶ
ldr r0, =RCC_CFGR
ldr r1, [r0]
orr r1, #(Bit18 :OR: Bit19 :OR: Bit20 :OR: Bit16 :OR: Bit14)
orr r1, #Bit10
str r1, [r0]
;����PLL���
ldr r0, =RCC_CR
ldr r1, [r0]
orr r1, #Bit24
str r1, [r0]
PllOk
ldr r1, [r0]
ands r1, #Bit25
beq PllOk
;ѡ��PLLʱ����Ϊϵͳʱ��
ldr r0, =RCC_CFGR
ldr r1, [r0]
orr r1, #(Bit18 :OR: Bit19 :OR: Bit20 :OR: Bit16 :OR: Bit14)
orr r1, #Bit10
orr r1, #Bit1
str r1, [r0]
;����RCC�������
ldr r0, =RCC_APB2ENR
mov r1, #(Bit14 :OR: Bit4 :OR: Bit2)
str r1, [r0]
;PA9����0�����
ldr r0, =GPIOA_CRH
ldr r1, [r0]
orr r1, #(Bit4 :OR: Bit5)
;PA.9���ģʽ,����ٶ�50MHz
orr r1, #Bit7
and r1, #~Bit6
;10:���ù����������ģʽ
str r1, [r0]
ldr r0, =USART1_BRR
mov r1, #0x271
str r1, [r0]
;������-> 115200
ldr r0, =USART1_CR1
mov r1, #0x200c
str r1, [r0]
;USARTģ����ʹ�� ���������ʹ��
;71 02 00 00 2c 20 00 00
;AFIO ��������
;Systick ��������
ldr r0, =SYSTICKRVR
;Systickװ��ֵ
mov r1, #9000
str r1, [r0]
ldr r0, =SYSTICKCSR
;�趨,����Systick
mov r1, #0x03
str r1, [r0]
;�л����û����߳���ģʽ
ldr r0, =PSP_TOP
;��ʼ���̶߳�ջ
msr psp, r0
mov r0, #3
msr control, r0
;��ʼ��SRAM�Ĵ���
mov r1, #0
ldr r0, =Flag1
str r1, [r0]
ldr r0, =DlyI
str r1, [r0]
ldr r0, =DlyJ
str r1, [r0]
ldr r0, =DlyK
str r1, [r0]
ldr r0, =SysTim
str r1, [r0]
;��ѭ��
main
ldr r0, =Flag1
ldr r1, [r0]
tst r1, #Bit1
;SysTick����0.5s,��λbit 1
beq main ;0.5s��־��û����λ
;0.5s��־�Ѿ���λ
ldr r0, =b_05s
;λ����������0.5s��־
mov r1, #0
str r1, [r0]
mov r0, #'H'
bl send_a_char
mov r0, #'e'
bl send_a_char
mov r0, #'l'
bl send_a_char
mov r0, #'l'
bl send_a_char
mov r0, #'o'
bl send_a_char
mov r0, #' '
bl send_a_char
mov r0, #'W'
bl send_a_char
mov r0, #'o'
bl send_a_char
mov r0, #'r'
bl send_a_char
mov r0, #'l'
bl send_a_char
mov r0, #'d'
bl send_a_char
mov r0, #'\n'
bl send_a_char
b main
;�ӳ��� ����1����һ���ַ�
send_a_char
push {r0 - r3}
ldr r2, =USART1_DR
str r0, [r2]
b1
ldr r2, =USART1_SR
ldr r2, [r2]
tst r2, #0x40
beq b1
;�������(Transmission complete)�ȴ�
pop {r0 - r3}
bx lr
;�쳣����
NMI_Handler
bx lr
HardFault_Handler
bx lr
SysTick_Handler
ldr r0, =SysTim
ldr r1, [r0]
add r1, #1
str r1, [r0]
cmp r1, #500
bcc TickExit
mov r1, #0
str r1, [r0]
ldr r0, =b_05s
;���ڵ���500�� ����ʱ�ӵδ������ ����0.5s��־λ
;�������1
mov r1, #1
str r1, [r0]
TickExit
bx lr
ALIGN
;ͨ��������ָ��NOP���,��ʹ��ǰλ����һ��ָ���ı߽����
END��ѡ����hex�ļ�!?
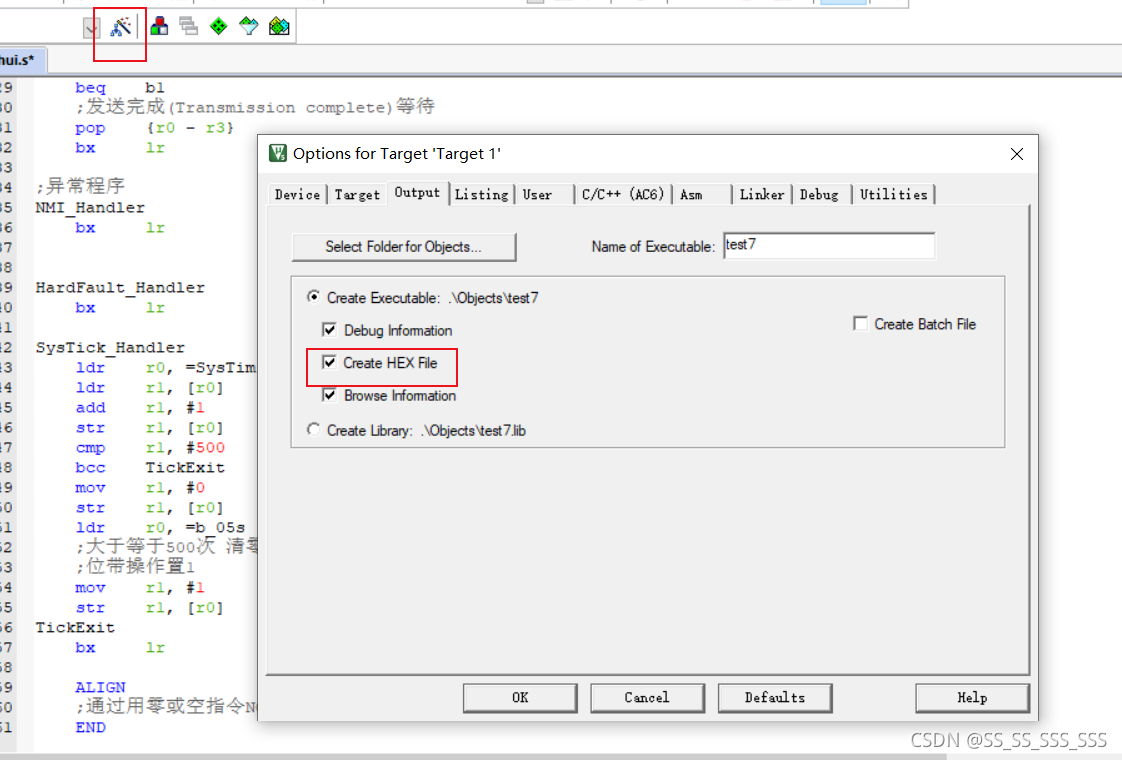
?�����ļ�

?3.��¼
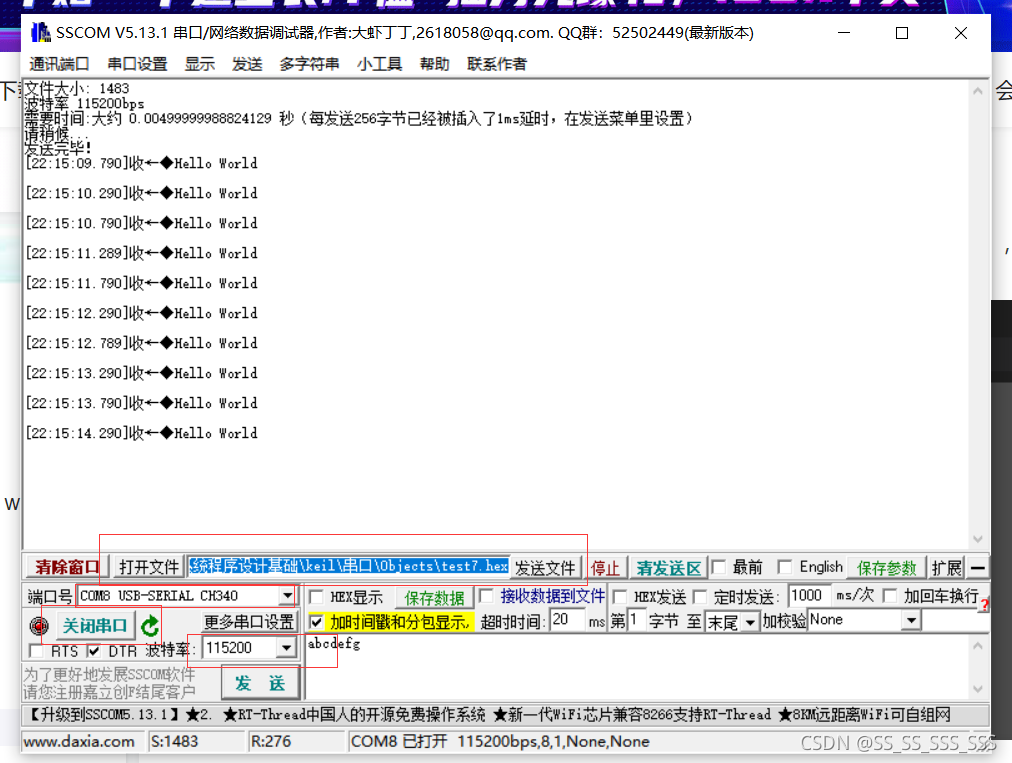
��boot0Ϊ1�������¼,Ȼ��boot0��Ϊ0,Ȼ��ϵ���ͨ�硣�����ڵ�������,�ո����ɵ�hex�ļ�,�ٵ�������ļ�,�˿ںŸ�Ϊ![]() ,������Ĭ����115200,������ڼ��ɽ��յ�hello world.
,������Ĭ����115200,������ڼ��ɽ��յ�hello world.
��.��keil�۲�ʱ����
1?.��������
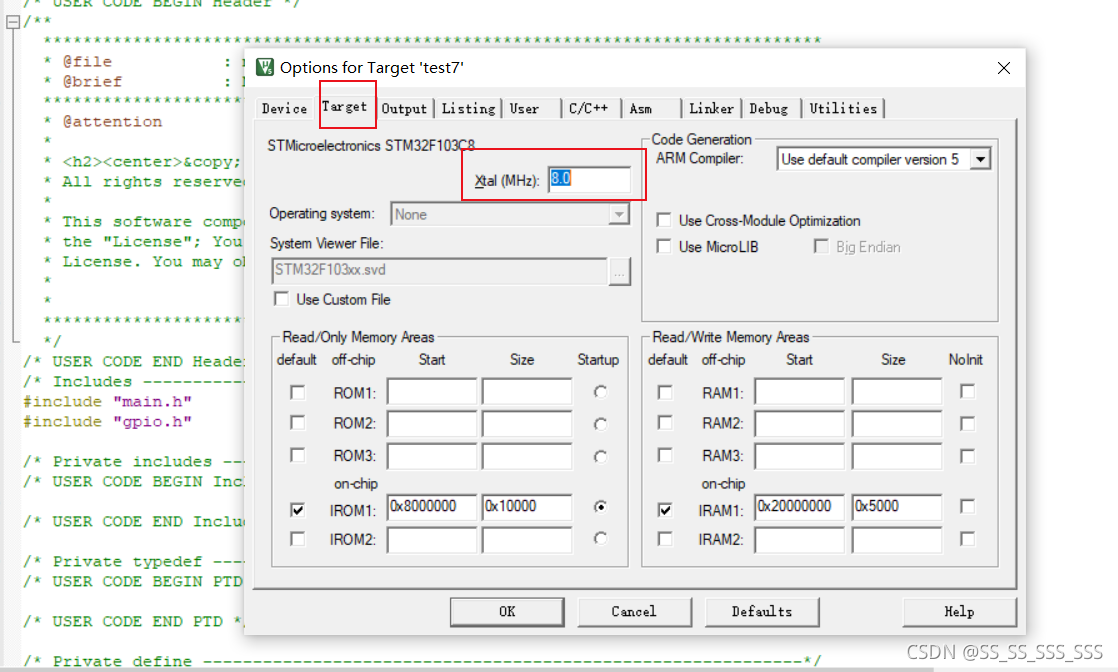
1.1ѡ���ⲿ����,����Ϊ8.0
1.2���õ��ԵIJ�����
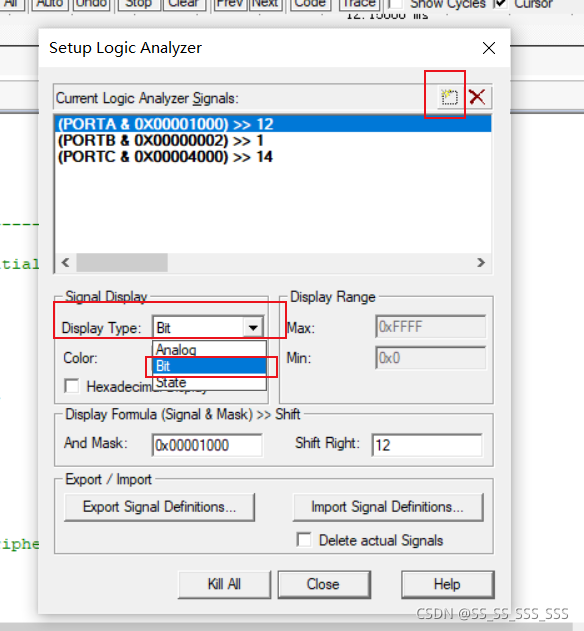
 ??1.3�������ģʽ,�����������ܡ����setup,��������,�����������ƺ�չʾ��������Ϊbit��?
??1.3�������ģʽ,�����������ܡ����setup,��������,�����������ƺ�չʾ��������Ϊbit��?
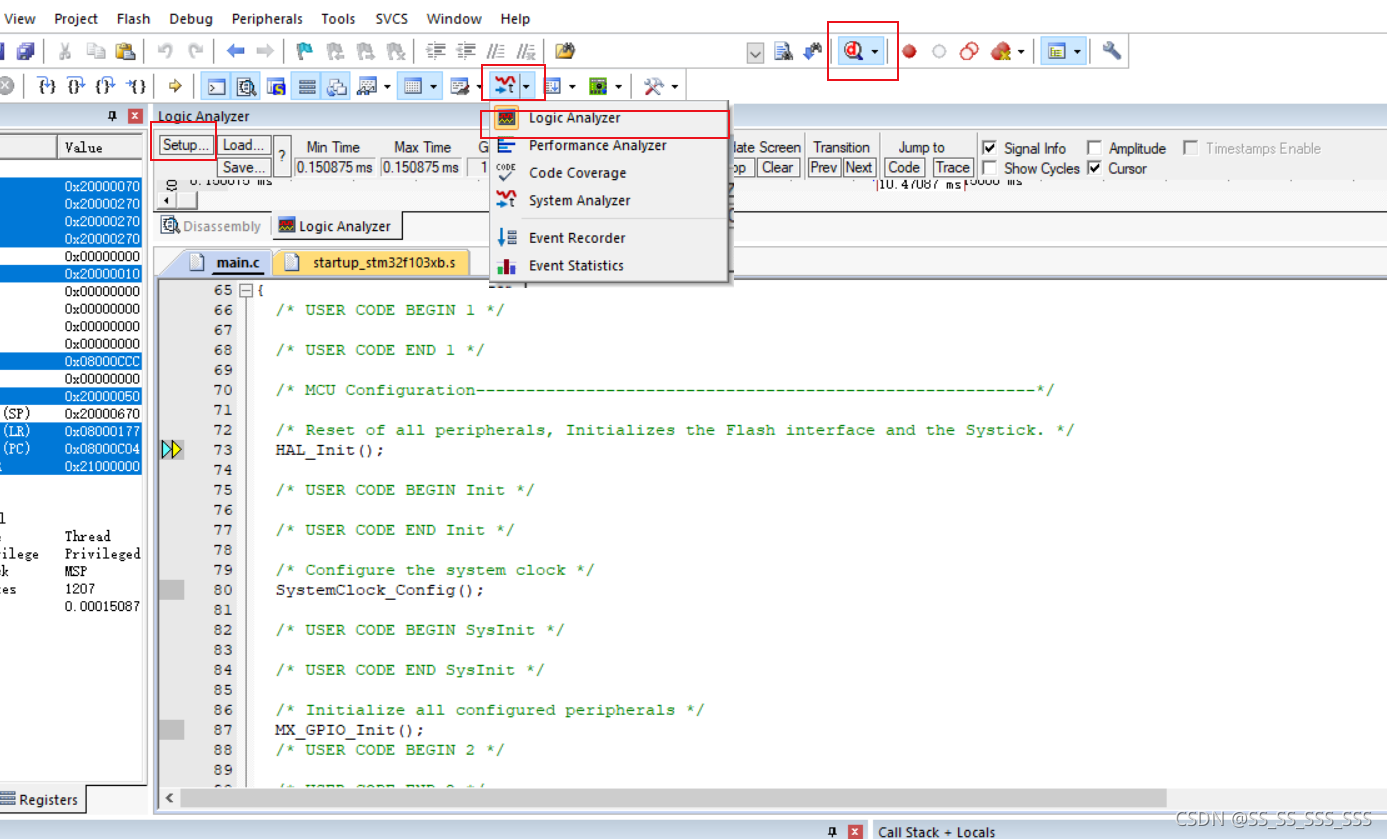
?1.4�����

?2.�۲�����GPIO�˿ڵ��������
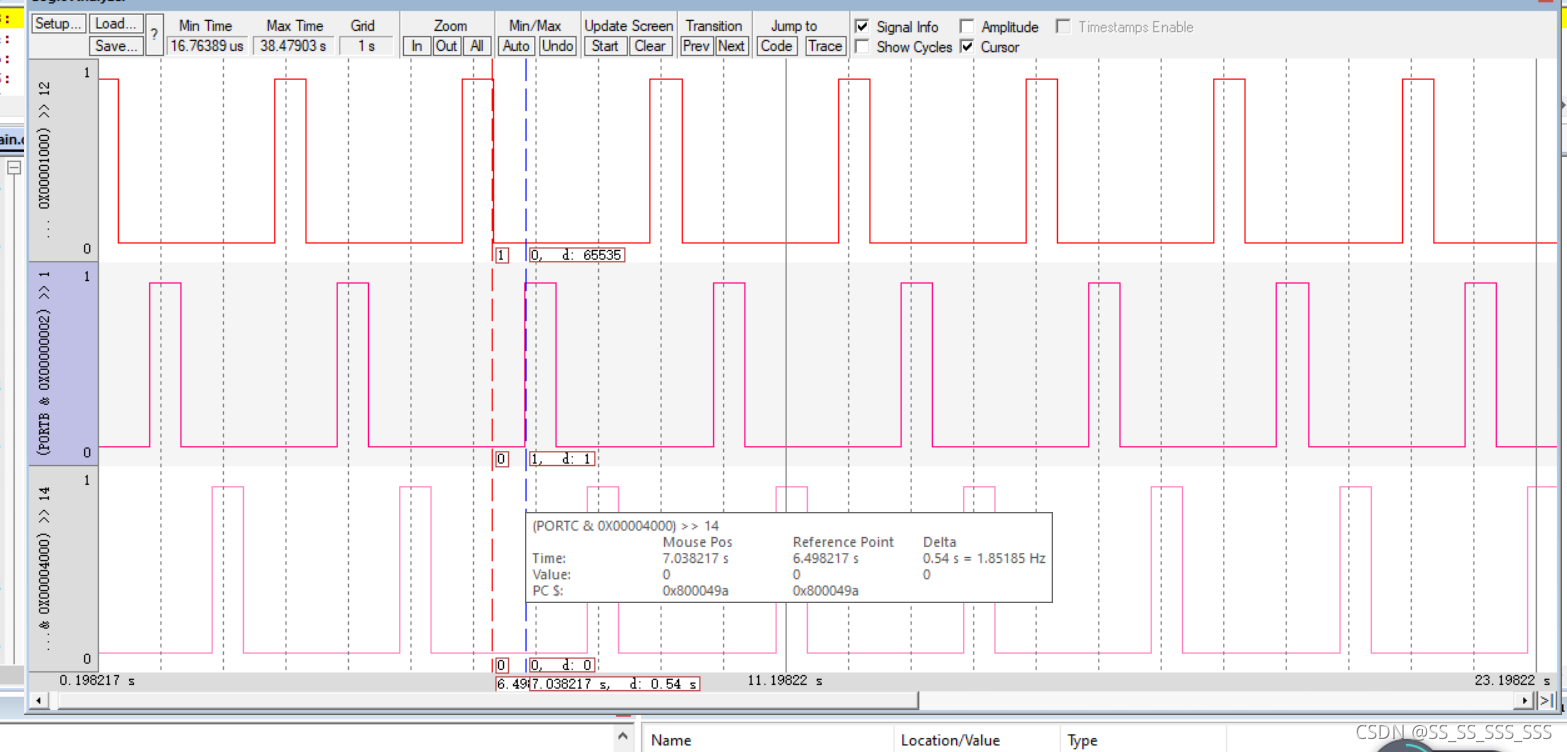
���ݲ���ͼ����,���η�ӳ��ʱ��״̬��ȷ,�������ŵĸߵ�ƽ������Ϊ0.5s�Ľ������,�Ӷ�ʵ����ˮ�Ƶ���˸��
3.�����������
3.1�������ú�ǰ�沽����ͬ,�ڴ�������ʱ��ͬ��

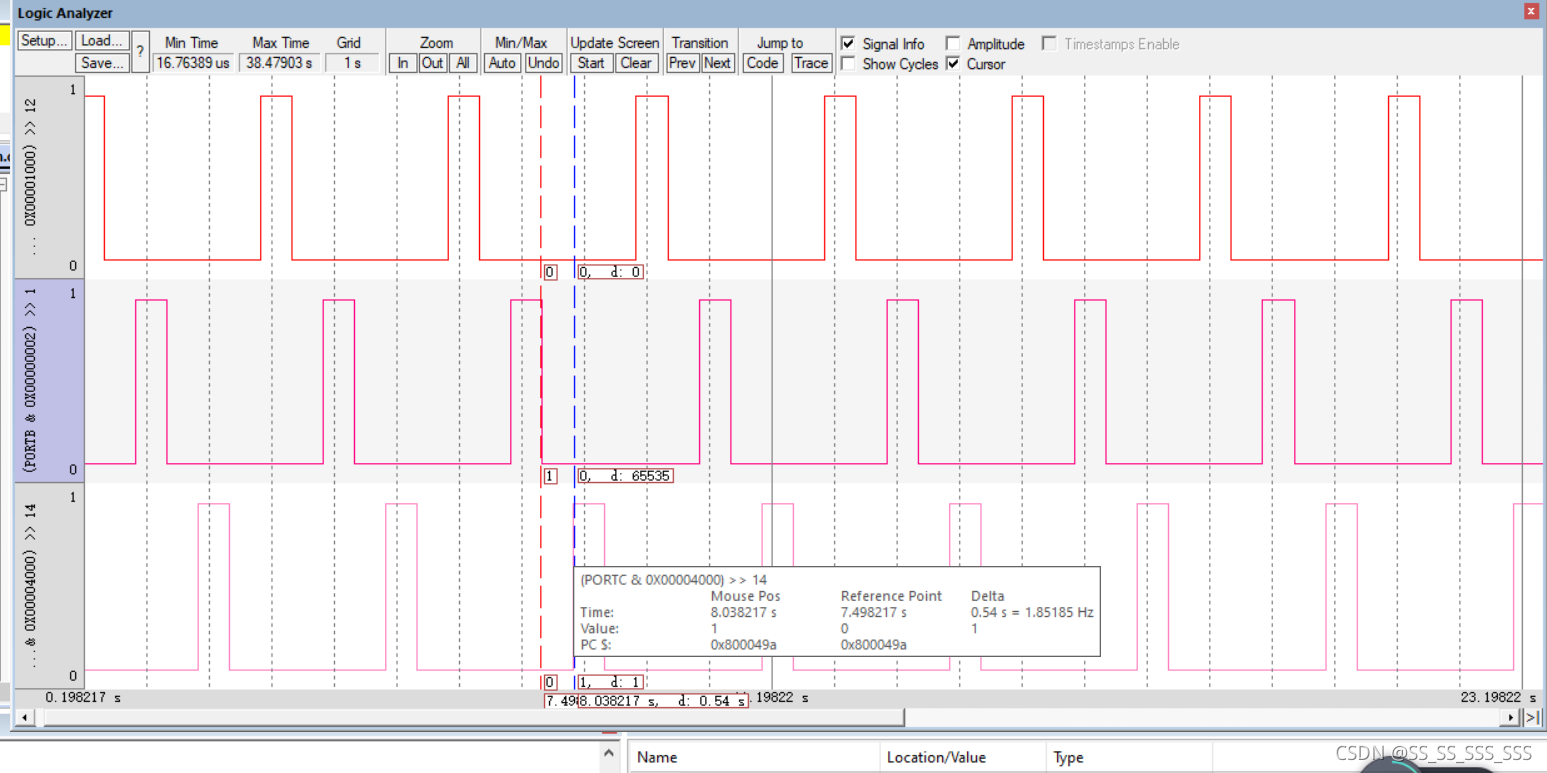
?3.2���г���۲Ⲩ��
?���ݲ���ͼ�ɵó���¼��hello world���������Ϊ0.5s,ÿ��0.5s�ı�ߵ͵�ƽ�����η�ӳ��ʱ��״̬��ȷ��
��.�ܽ�
? ���ǵ�һ��ʹ��STMCubeMX,������ú�оƬ���ŵȺ�,�Ϳ����Զ����ɲ��ִ���,�����������ֶ�д�����ʱ��ȷ��Ҳ�ߡ�Ȼ��;��������������Ҫ����·������,�Ժ���ñ����ļ��ȶ���Ҫ��������,���ױ�����
?�����:
����stm32CubeMX(Hal��)��stm32����ͨ��_Laul Ken-Yi�IJ���-CSDN����STM32CubeMX�������ʹ��_��&&�ӵIJ���-CSDN�����STM32������������STM32CubeMX,Keil5_Harriet�IJ���-CSDN����stm32֮����ͨ��_��&&�ӵIJ���-CSDN�����STM32������������STM32CubeMX,Keil5_Harriet�IJ���-CSDN����