一、中断原理
1.数据传输方式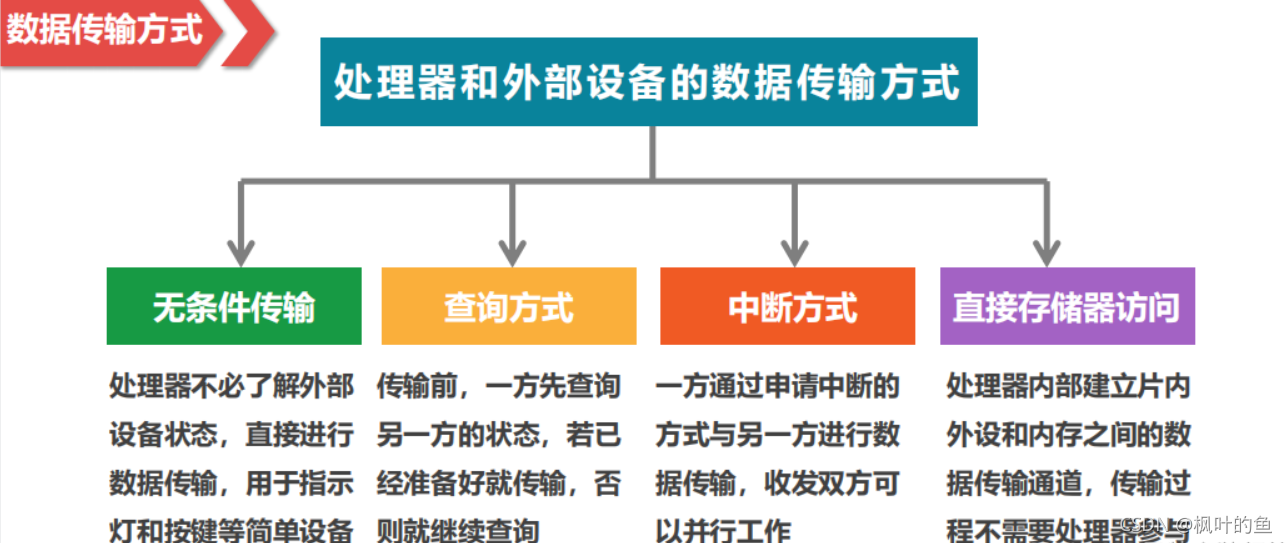
2.全过程
 ?
?
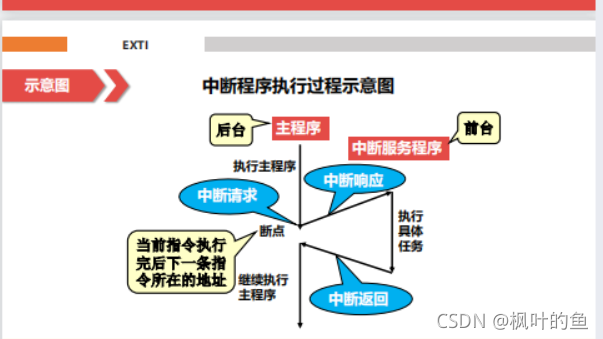
3.执行过程
?
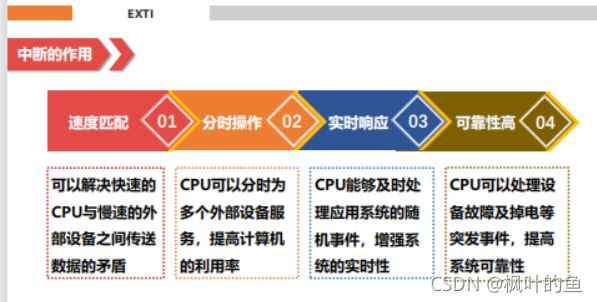
?4.作用
5.优先级
 ?
?
6.中断响应过程
?
?
二、 CubeMX中断控制LED灯(STM32F103C8)
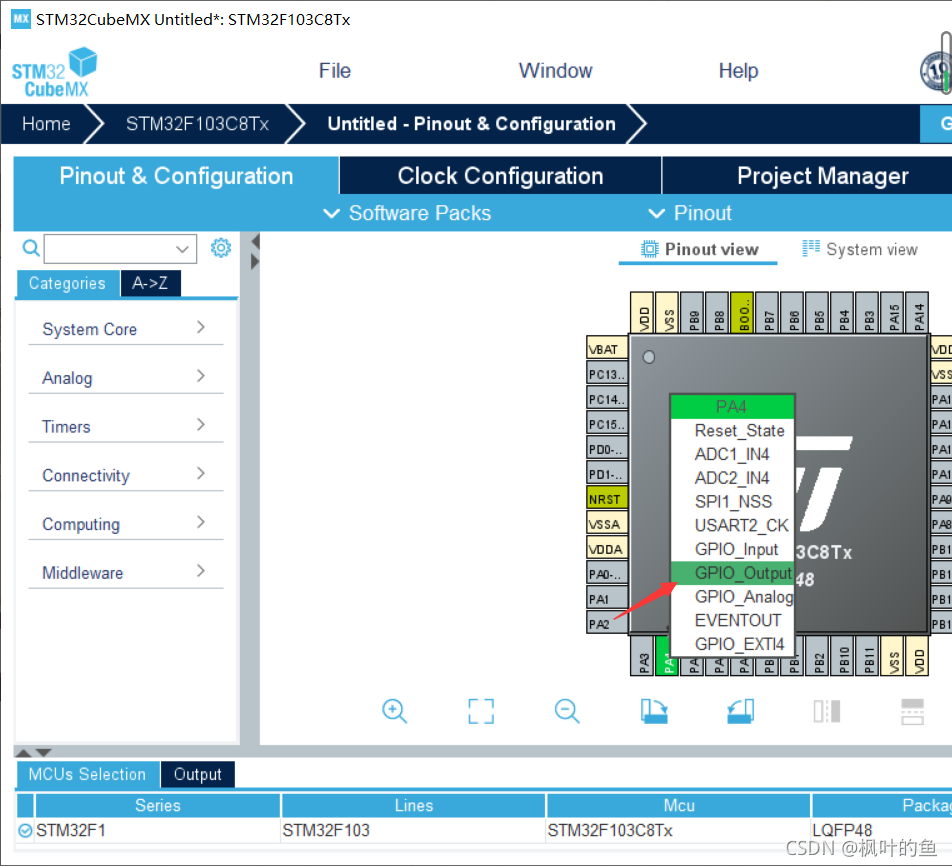
1.选择PA4设置为GPIO_Output输出模式,PB9设置为GPIO_EXTI9中断模式
 ?
?
?2.PB9的GPIO mode
 ?3.
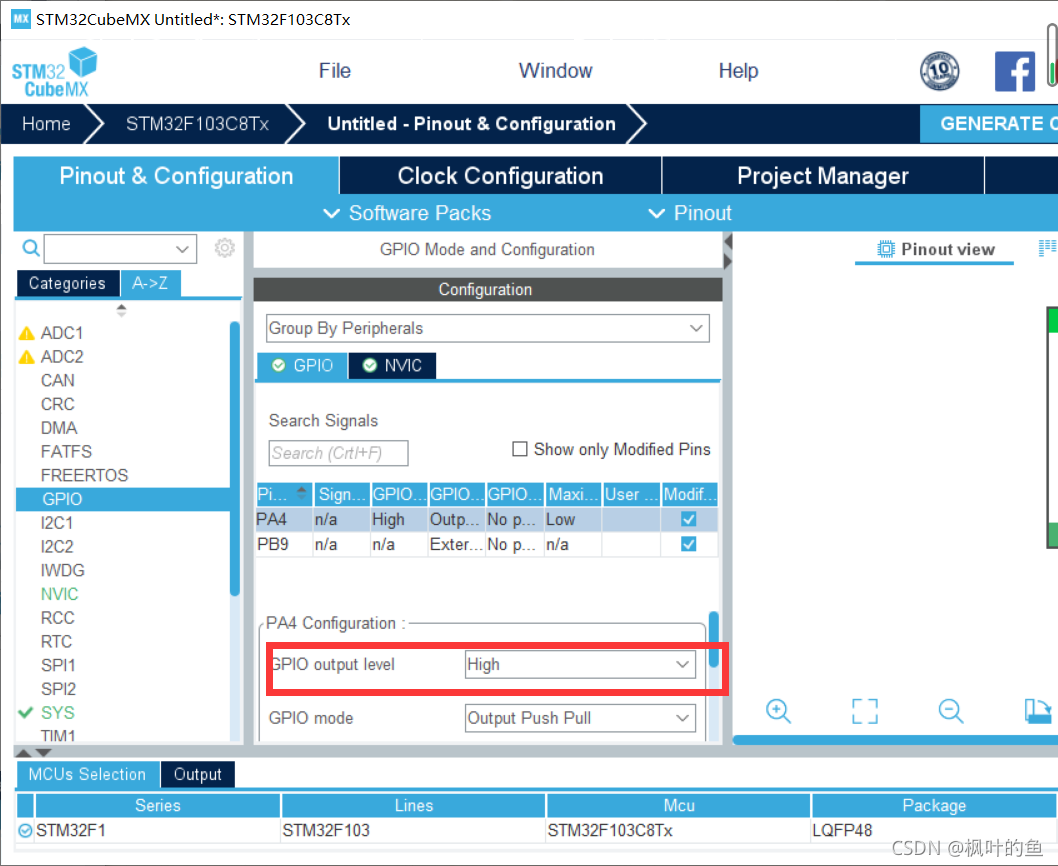
?3.PA4引脚配置,默认设置为High,处于熄灭状态?
4.RCC配置时钟和SYS配置?
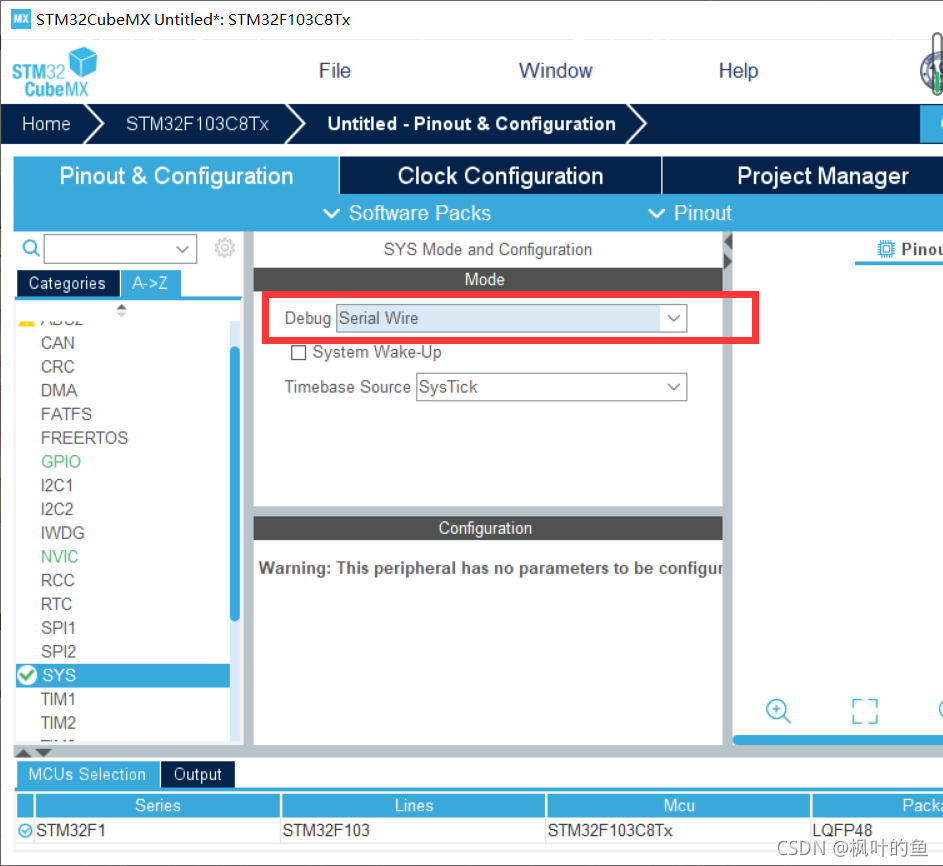
 ?
?
5,开启中断
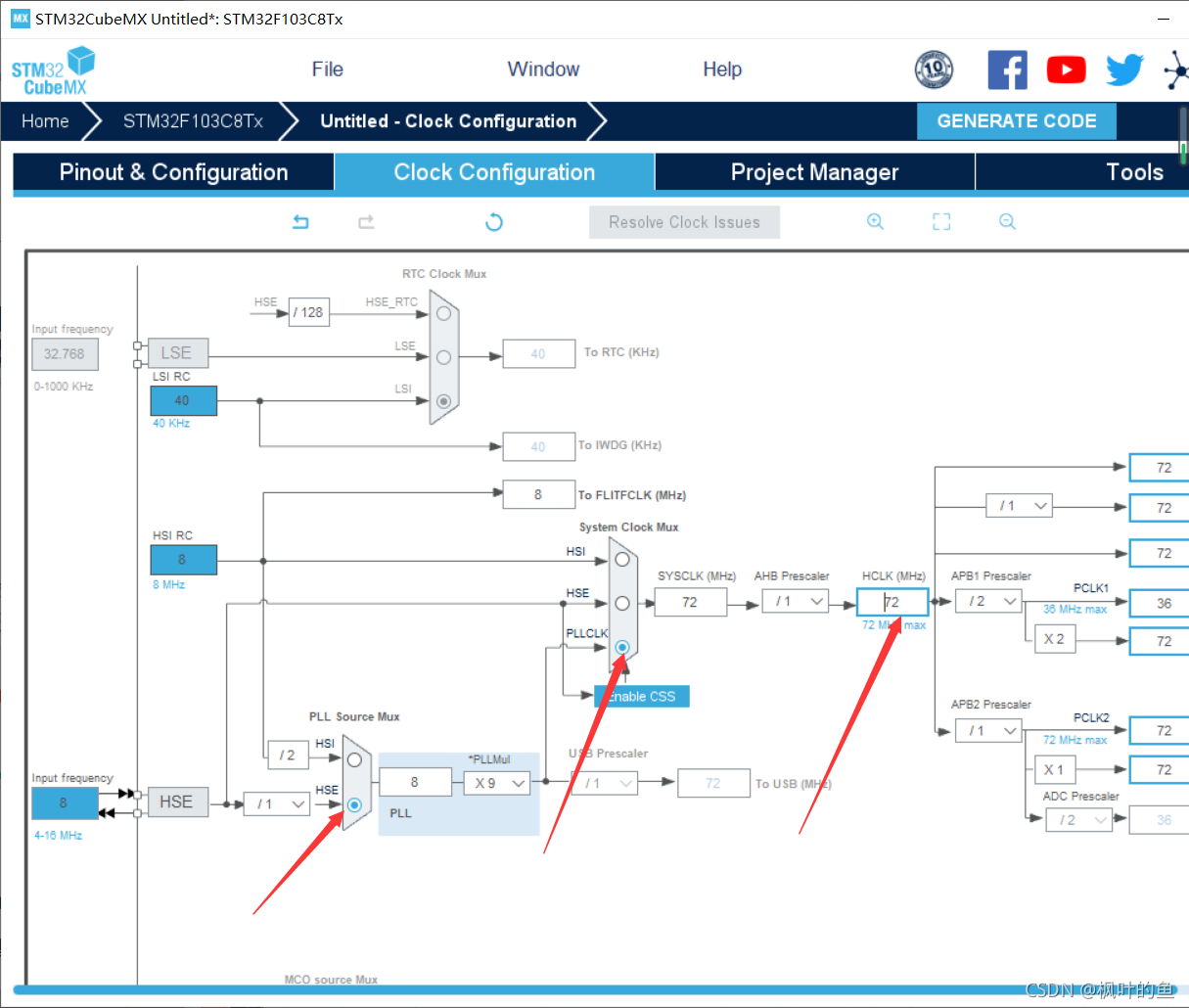
 ?6.时钟树设置
?6.时钟树设置
?7.用keil5打开
 ?
?
(二)代码修改
在main.c中加入以下代码
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
/* Prevent unused argument(s) compilation warning */
HAL_GPIO_TogglePin(GPIOA,GPIO_PIN_4); //翻转电平
/* NOTE: This function Should not be modified, when the callback is needed,
the HAL_GPIO_EXTI_Callback could be implemented in the user file
*/
}
(三)编译运行
1.烧录boot0置1,boot1置0
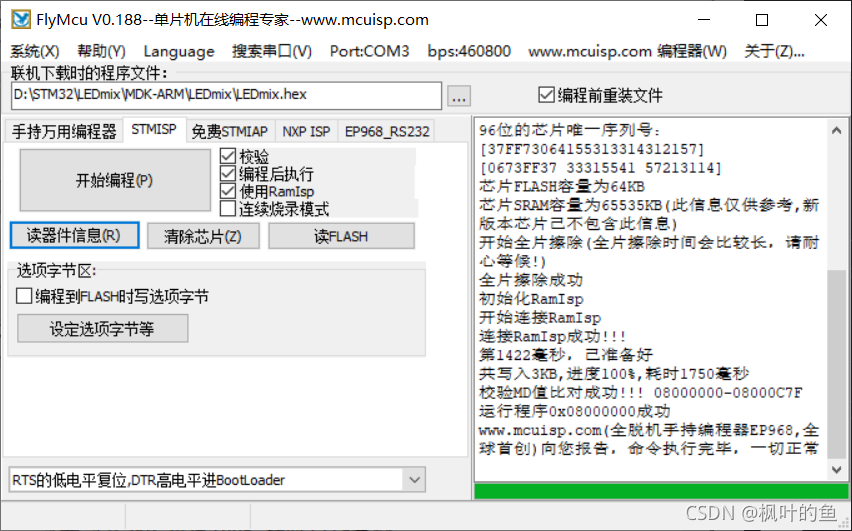
2.结果
?
?
?
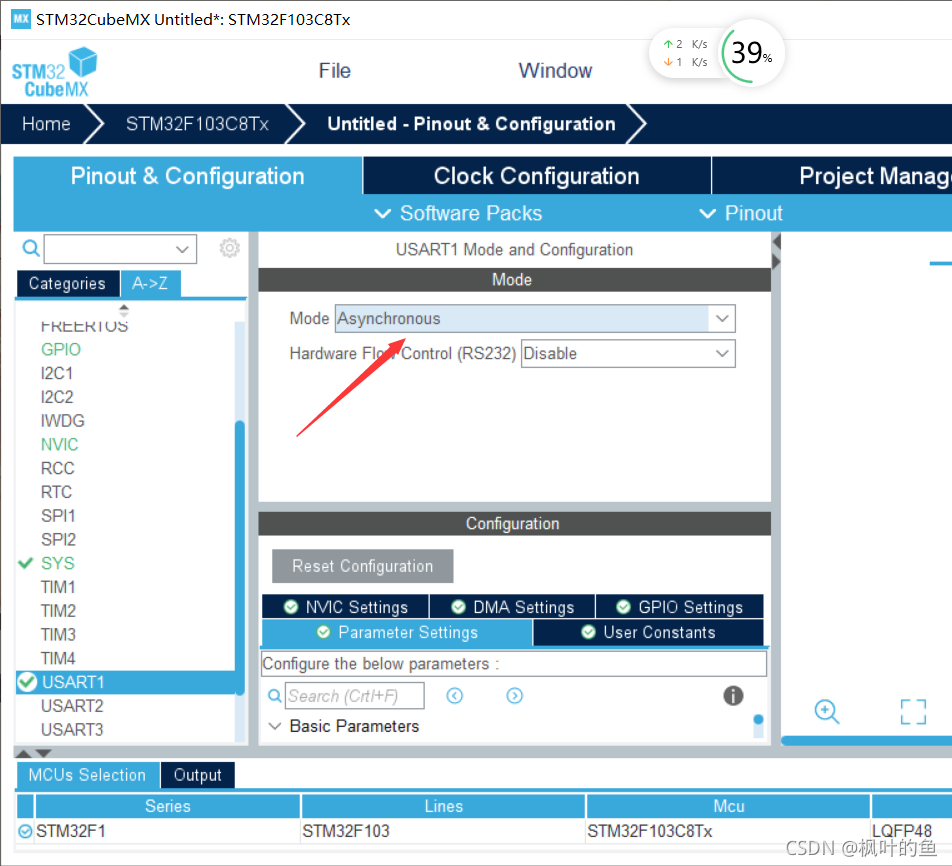
三、HAL库中断串口通信
(一)新建项目
1.选择USART1为异步通信模式:
?
?
?2.RCC配置时钟和SYS配置
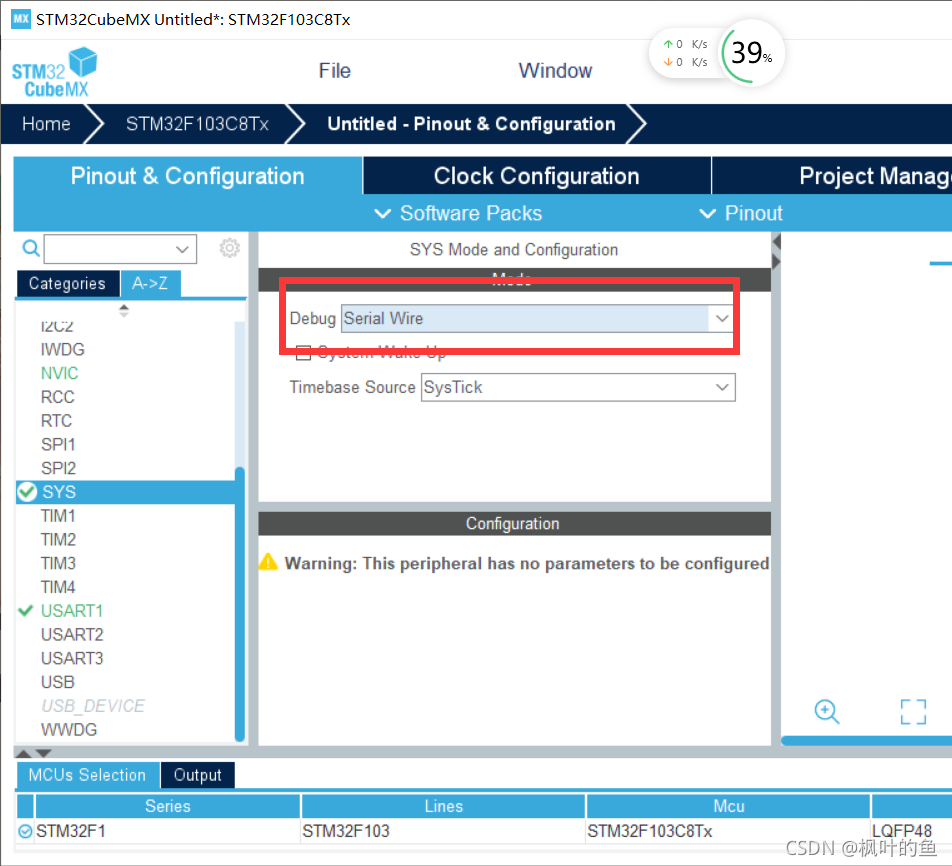
 ?
?
3.配置串口
 ?
?
4.使能中断
 ?
?
5.重复之前配置用keil打开
(二)代码
- 打开main.c文件,在文件中定义缓冲区大小:
#define LENGTH 10 // 接收缓冲区大小
2.定义缓冲区和标志位:
uint8_t RxBuffer[LENGTH]; // 接收缓冲区
uint8_t Rxflag = 0; // 标志位,0为接收未完成,1为接
3.在while循环中发送成功信息和接收到的信息:
if (Rxflag == 1){ // 若数据接收完成
Rxflag = 0; // 清除标志位
HAL_UART_Transmit(&huart1, (uint8_t *)data, 18, 0xFFFF); // 接收成功信息
// 发送接收到的字符
HAL_UART_Transmit_IT(&huart1, (uint8_t*)RxBuffer, LENGTH);
}
4.在main.c中定义回调函数
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart){
if (huart->Instance == USART1){
Rxflag = 1; // 设置标志位为1
HAL_UART_Receive_IT(&huart1, (uint8_t*)&RxBuffer, LENGTH); // 使能接收中断
}
}
(三)烧录运行结果
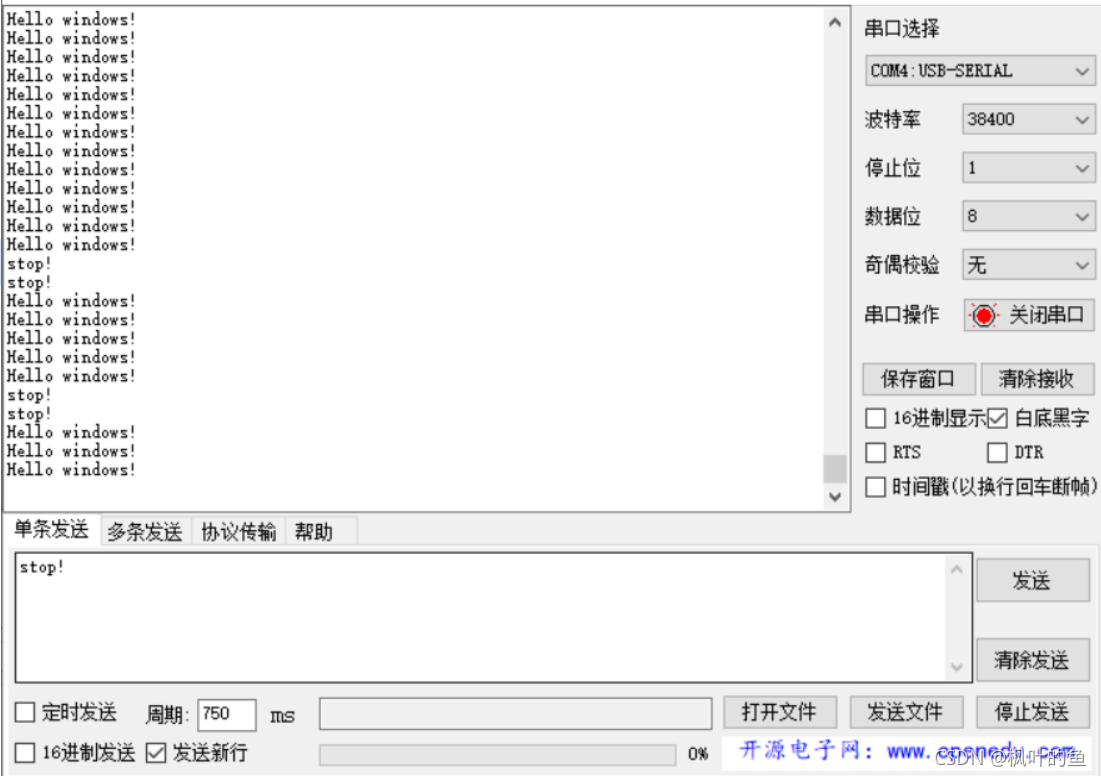
?
四、总结
STM32中断的核心是NVIC,其中重点是嵌套,有了嵌套就有了优先级。如果有低响应优先级中断正在执行,那么高响应优先级的中断要等待已被响应的低响应优先级的中断执行结束后才能得到响应。当一个中断到来后,如果正在处理另一个中断,这个后到来的中断就要等到前一个中断处理完之后才能被处理。如果这两个中断同时到达,则中断控制器根据他们的响应优先级高低来决定先处理哪一个;如果他们的抢占式优先级和响应优先级都相等,则根据他们在中断表中的排位顺序决定处理顺序。这就是我本次实验对中断的一个理解概况
?