自学新手的第一个项目,做的时也在论坛查了许多大佬的文章,但还是有许多疑问,我就从一个小白的角度出发来和大家分享,应该对许多自学不久的萌新来说比较友好易懂。欢迎大家交流,大佬轻喷~~
简单的蓝牙小车,目前就只是手机控制小车前进转弯后退刹车这种功能,自己还在扩展・・・
PS:软件及接线图、原理图、芯片手册等资料都打包在文章末尾的下载链接中!!!
 https://www.bilibili.com/video/BV1Hg411K7md/
https://www.bilibili.com/video/BV1Hg411K7md/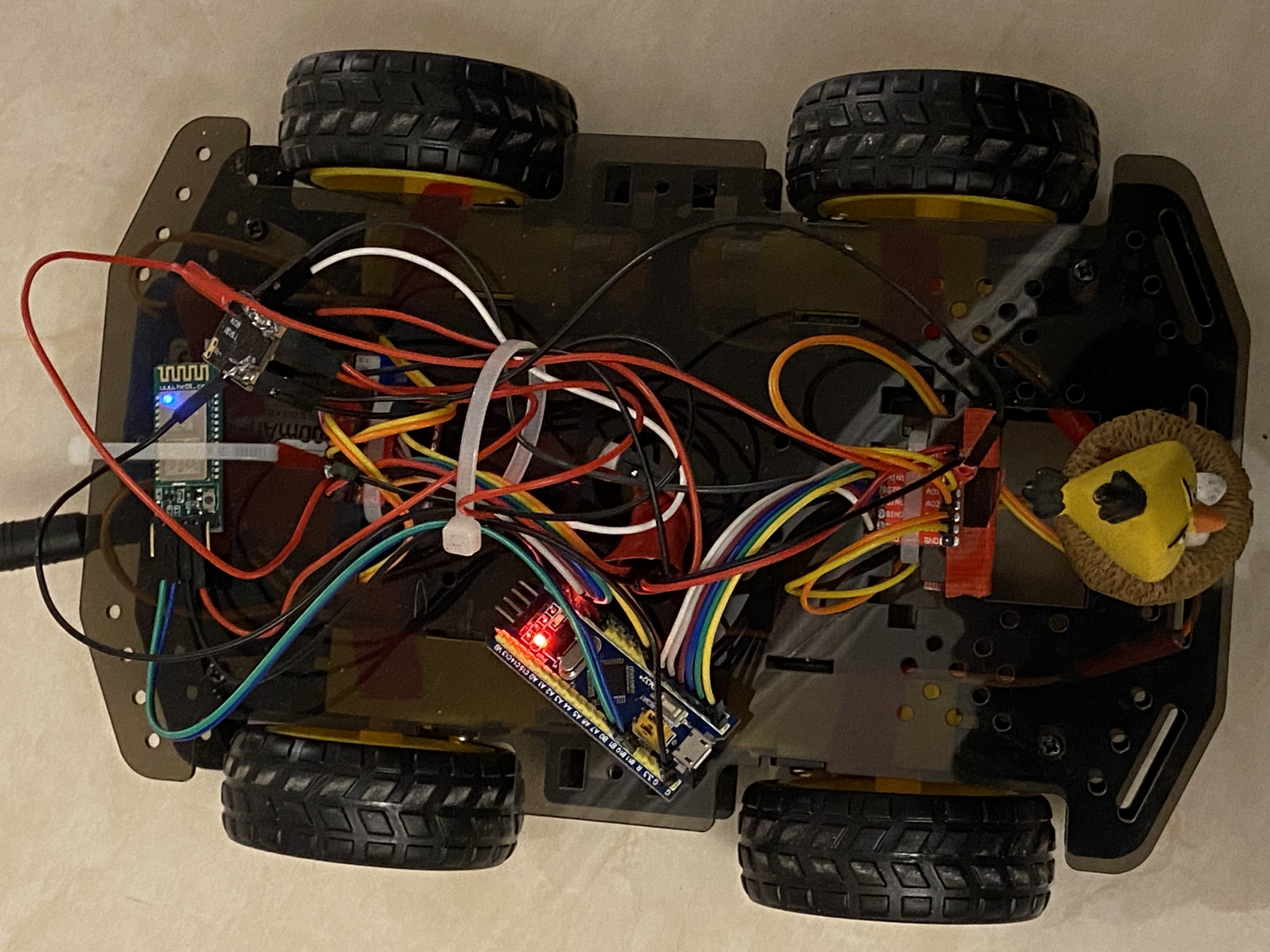
1:材料
车体、4个轮子、4个减速马达这一套,淘宝搜智能小车关键字就有卖;
12V锂电池x1;
电源开关x1(有个开关方便点);
STM32F103C8T6最小系统单片机x1;
JLINK烧写器?x1;
TB6612FNG直流电机驱动模块x2(一块能控制2个马达,我做的是四驱,所以要两块);
HC-08蓝牙4.0模块x1(我是苹果手机,只支持4.0,安卓手机没用过,应该HC-05蓝牙2.0也能? 用,看自己情况定,代码没区别通用);
手机x1(苹果蓝牙控制app:HackerRemote 要6元买;安卓这类带按键控制界面的蓝牙app比较多,自己找下吧~)
DC-DC 12V转3.3V模块x1;
母-母、公-母、公-公杜邦线若干(我自己接的话消耗量按左到右顺序递减);
作业工具(烙铁重要,胶带双面胶等按自己需要买吧)~~;
下面放上淘宝购物清单(防止被以为打广告,店名不放)↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓

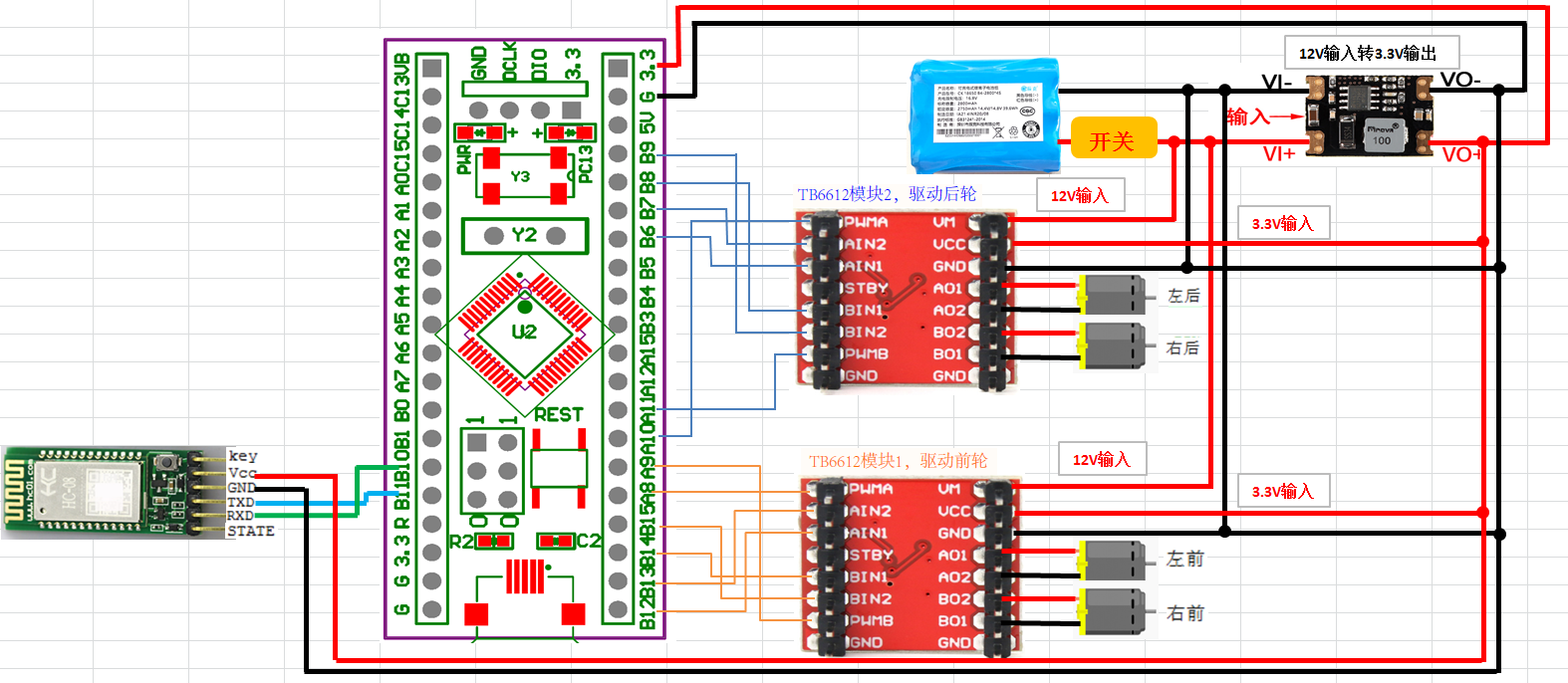
2.接线图及单片机原理图(下面2图+芯片的数据手册看就很清楚)
?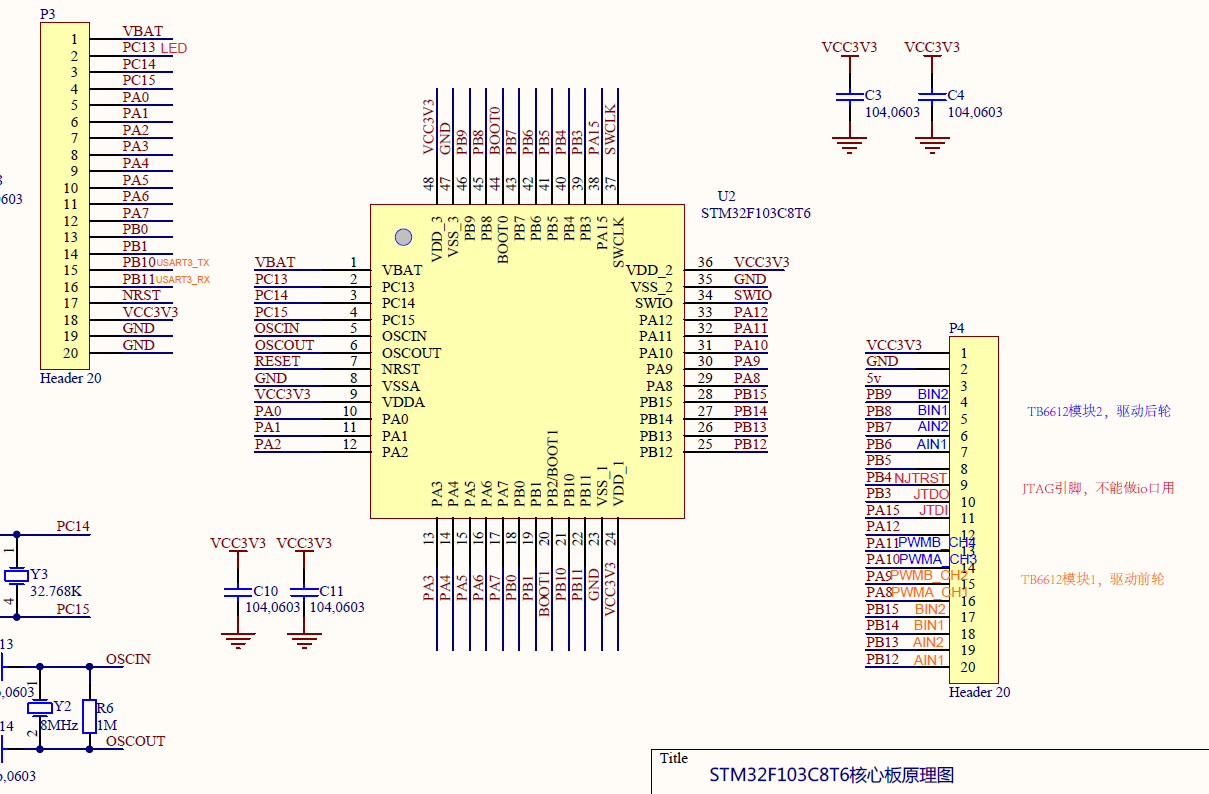
?PS:软件及接线图、原理图、芯片手册等资料都打包在文章末尾的下载链接中!!!
?3.TB6612电机驱动模块介绍
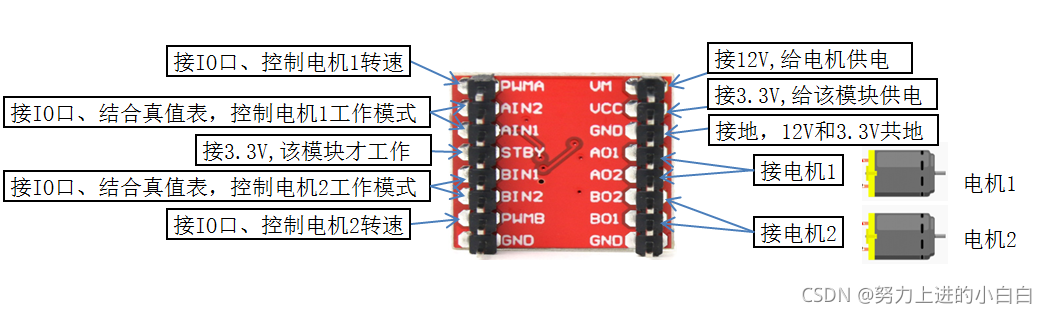
?真值表: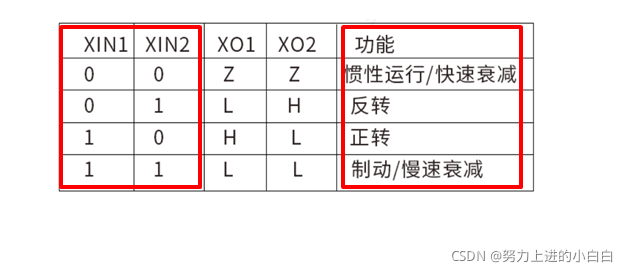
?四个电机,需要用到2个模块,另一个同理~~
4.HC-08蓝牙4.0模块介绍
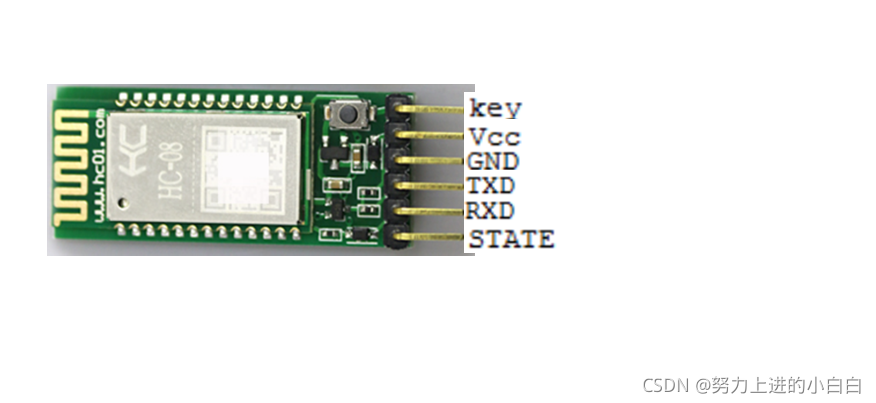
?这个模块就不多说了,买到手直接用,不需要做配置,我们只需接中间四个引脚(参考接线图)。有兴趣的自行百度或者看我附件里的手册资料。
?PS:软件及接线图、原理图、芯片手册等资料都打包在文章末尾的下载链接中!!!
5.部分代码(完整代码下载文末附件)
1.main.c部分,比较简单
int main(void)
{
TB6612_FR_Init(); //初始化TB6612模块1和模块2
MotorAllOFF(); //单片机上电默认先把4个电机关闭
USART3_Config(); //初始化蓝牙模块的串口
while(1)
{
RUN_Prg(); //小车蓝牙控制功能
}
}2.串口通讯部分
bsp_usart.c
#include "bsp_usart.h"
static void USART3_NVIC_Config(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
void USART3_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能GPIO时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3, ENABLE); //使能USART3时钟
/*TX_GPIO*/
GPIO_InitStructure.GPIO_Pin = USART3_GPIO_TX_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(USART3_GPIO_TX_PORT, &GPIO_InitStructure);
/*RX_GPIO*/
GPIO_InitStructure.GPIO_Pin = USART3_GPIO_RX_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(USART3_GPIO_RX_PORT, &GPIO_InitStructure);
/*USART3*/
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART3, &USART_InitStructure);
USART3_NVIC_Config();
USART_ITConfig(USART3, USART_IT_RXNE, ENABLE); //使能串口接收终断
USART_Cmd(USART3, ENABLE); //使能串口
}
bsp_usart.h
#ifndef __BSP_USART_H
#define __BSP_USART_H
#include "stm32f10x.h"
/*TX的GPIO端口定义*/
#define USART3_GPIO_TX_PIN GPIO_Pin_10
#define USART3_GPIO_TX_PORT GPIOB
#define USART3_GPIO_TX_CLK RCC_APB2Periph_GPIOB
/*RX的GPIO端口定义*/
#define USART3_GPIO_RX_PIN GPIO_Pin_11
#define USART3_GPIO_RX_PORT GPIOB
#define USART3_GPIO_RX_CLK RCC_APB2Periph_GPIOB
/*USART3定义*/
#define DEBUG_USARTx_CLK RCC_APB1Periph_USART3
void USART3_Config(void);
void USART3_Prg(void);
#endif /*__BSP_USART_H*/
3.TB6612电机驱动模块部分
bsp_tb6612.c
#include "bsp_tb6612.h"
/*TB6612模块1,驱动前轮 F*/
void TB6612_F_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(TB6612_F_GPIO_AIN1_CLK | TB6612_F_GPIO_AIN2_CLK | \
TB6612_F_GPIO_BIN1_CLK | TB6612_F_GPIO_BIN2_CLK , ENABLE);
GPIO_InitStructure.GPIO_Pin = TB6612_F_GPIO_AIN1_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(TB6612_F_GPIO_AIN1_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = TB6612_F_GPIO_AIN2_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(TB6612_F_GPIO_AIN2_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = TB6612_F_GPIO_BIN1_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(TB6612_F_GPIO_BIN1_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = TB6612_F_GPIO_BIN2_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(TB6612_F_GPIO_BIN2_PORT, &GPIO_InitStructure);
}
void TB6612_F_PWM_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(TB6612_F_GPIO_PWMA_CH1_CLK, ENABLE);
GPIO_InitStructure.GPIO_Pin = TB6612_F_GPIO_PWMA_CH1_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(TB6612_F_GPIO_PWMA_CH1_PORT,&GPIO_InitStructure);
RCC_APB2PeriphClockCmd(TB6612_F_GPIO_PWMB_CH2_CLK, ENABLE);
GPIO_InitStructure.GPIO_Pin = TB6612_F_GPIO_PWMB_CH2_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(TB6612_F_GPIO_PWMB_CH2_PORT,&GPIO_InitStructure);
}
/*TB6612模块2,驱动后轮 R*/
void TB6612_R_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(TB6612_R_GPIO_AIN1_CLK | TB6612_R_GPIO_AIN2_CLK | \
TB6612_R_GPIO_BIN1_CLK | TB6612_R_GPIO_BIN2_CLK , ENABLE);
GPIO_InitStructure.GPIO_Pin = TB6612_R_GPIO_AIN1_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(TB6612_R_GPIO_AIN1_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = TB6612_R_GPIO_AIN2_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(TB6612_R_GPIO_AIN2_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = TB6612_R_GPIO_BIN1_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(TB6612_R_GPIO_BIN1_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = TB6612_R_GPIO_BIN2_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(TB6612_R_GPIO_BIN2_PORT, &GPIO_InitStructure);
}
void TB6612_R_PWM_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(TB6612_R_GPIO_PWMA_CH3_CLK, ENABLE);
GPIO_InitStructure.GPIO_Pin = TB6612_R_GPIO_PWMA_CH3_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(TB6612_R_GPIO_PWMA_CH3_PORT,&GPIO_InitStructure);
RCC_APB2PeriphClockCmd(TB6612_R_GPIO_PWMB_CH4_CLK, ENABLE);
GPIO_InitStructure.GPIO_Pin = TB6612_R_GPIO_PWMB_CH4_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(TB6612_R_GPIO_PWMB_CH4_PORT,&GPIO_InitStructure);
}
static void ADVANCE_TIM1_Mode_Config(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB2PeriphClockCmd(ADVANCE_TIM_CLK , ENABLE);
TIM_TimeBaseInitStructure.TIM_Prescaler = (72-1);
TIM_TimeBaseInitStructure.TIM_Period = (100-1);
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(ADVANCE_TIM, &TIM_TimeBaseInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_High;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable;
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Set;
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Reset;
TIM_OCInitStructure.TIM_Pulse = 0;
TIM_OC1Init(ADVANCE_TIM, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(ADVANCE_TIM,TIM_OCPreload_Enable);
TIM_OCInitStructure.TIM_Pulse = 0;
TIM_OC2Init(ADVANCE_TIM, &TIM_OCInitStructure);
TIM_OC2PreloadConfig(ADVANCE_TIM,TIM_OCPreload_Enable);
TIM_OCInitStructure.TIM_Pulse = 0;
TIM_OC3Init(ADVANCE_TIM, &TIM_OCInitStructure);
TIM_OC3PreloadConfig(ADVANCE_TIM,TIM_OCPreload_Enable);
TIM_OCInitStructure.TIM_Pulse = 0;
TIM_OC4Init(ADVANCE_TIM, &TIM_OCInitStructure);
TIM_OC4PreloadConfig(ADVANCE_TIM,TIM_OCPreload_Enable);
TIM_Cmd(ADVANCE_TIM, ENABLE);
}
//void TB6612_F_Init(void) //控制前面2轮的电机驱动模块初始化
//{
// TB6612_F_GPIO_Config();
// TB6612_F_PWM_GPIO_Config();
// ADVANCE_TIM1_Mode_Config();
//}
//void TB6612_R_Init(void) //控制后面2轮的电机驱动模块初始化
//{
// TB6612_R_GPIO_Config();
// TB6612_R_PWM_GPIO_Config();
// ADVANCE_TIM1_Mode_Config();
//}
void TB6612_FR_Init(void) //控制前和后2轮的电机驱动模块初始化
{
TB6612_F_GPIO_Config();
TB6612_F_PWM_GPIO_Config();
TB6612_R_GPIO_Config();
TB6612_R_PWM_GPIO_Config();
ADVANCE_TIM1_Mode_Config();
}
bsp_tb6612.h
#ifndef __BSP_TB6612_H
#define __BSP_TB6612_H
#include "stm32f10x.h"
/*TB6612模块1*/
/*定义TB6612模块1(驱动前轮(_F))的AIN1、AIN2、BIN1、BIN2的GPIO端口*/
#define TB6612_F_GPIO_AIN1_PIN GPIO_Pin_12
#define TB6612_F_GPIO_AIN1_PORT GPIOB
#define TB6612_F_GPIO_AIN1_CLK RCC_APB2Periph_GPIOB
#define TB6612_F_GPIO_AIN2_PIN GPIO_Pin_13
#define TB6612_F_GPIO_AIN2_PORT GPIOB
#define TB6612_F_GPIO_AIN2_CLK RCC_APB2Periph_GPIOB
#define TB6612_F_GPIO_BIN1_PIN GPIO_Pin_14
#define TB6612_F_GPIO_BIN1_PORT GPIOB
#define TB6612_F_GPIO_BIN1_CLK RCC_APB2Periph_GPIOB
#define TB6612_F_GPIO_BIN2_PIN GPIO_Pin_15
#define TB6612_F_GPIO_BIN2_PORT GPIOB
#define TB6612_F_GPIO_BIN2_CLK RCC_APB2Periph_GPIOB
/*定义TB6612模块1(驱动前轮(_F))的PWMA、PWMB的GPIO端口*/
#define TB6612_F_GPIO_PWMA_CH1_PIN GPIO_Pin_8
#define TB6612_F_GPIO_PWMA_CH1_PORT GPIOA
#define TB6612_F_GPIO_PWMA_CH1_CLK RCC_APB2Periph_GPIOA
#define TB6612_F_GPIO_PWMB_CH2_PIN GPIO_Pin_9
#define TB6612_F_GPIO_PWMB_CH2_PORT GPIOA
#define TB6612_F_GPIO_PWMB_CH2_CLK RCC_APB2Periph_GPIOA
/*TB6612模块2*/
/*定义TB6612模块2(驱动后轮(_R))的AIN1、AIN2、BIN1、BIN2的GPIO端口*/
#define TB6612_R_GPIO_AIN1_PIN GPIO_Pin_6
#define TB6612_R_GPIO_AIN1_PORT GPIOB
#define TB6612_R_GPIO_AIN1_CLK RCC_APB2Periph_GPIOB
#define TB6612_R_GPIO_AIN2_PIN GPIO_Pin_7
#define TB6612_R_GPIO_AIN2_PORT GPIOB
#define TB6612_R_GPIO_AIN2_CLK RCC_APB2Periph_GPIOB
#define TB6612_R_GPIO_BIN1_PIN GPIO_Pin_8
#define TB6612_R_GPIO_BIN1_PORT GPIOB
#define TB6612_R_GPIO_BIN1_CLK RCC_APB2Periph_GPIOB
#define TB6612_R_GPIO_BIN2_PIN GPIO_Pin_9
#define TB6612_R_GPIO_BIN2_PORT GPIOB
#define TB6612_R_GPIO_BIN2_CLK RCC_APB2Periph_GPIOB
/*定义TB6612模块2(驱动后轮(_R))的PWMA、PWMB的GPIO端口*/
#define TB6612_R_GPIO_PWMA_CH3_PIN GPIO_Pin_10
#define TB6612_R_GPIO_PWMA_CH3_PORT GPIOA
#define TB6612_R_GPIO_PWMA_CH3_CLK RCC_APB2Periph_GPIOA
#define TB6612_R_GPIO_PWMB_CH4_PIN GPIO_Pin_11
#define TB6612_R_GPIO_PWMB_CH4_PORT GPIOA
#define TB6612_R_GPIO_PWMB_CH4_CLK RCC_APB2Periph_GPIOA
/*高级定时器TIM1参数定义*/
#define ADVANCE_TIM TIM1
#define ADVANCE_TIM_CLK RCC_APB2Periph_TIM1
void TB6612_F_GPIO_Config(void);
void TB6612_F_PWM_GPIO_Config(void);
void TB6612_R_GPIO_Config(void);
void TB6612_R_PWM_GPIO_Config(void);
//void TB6612_F_Init(void);
//void TB6612_R_Init(void);
void TB6612_FR_Init(void);
#endif /*BSP_TB6612_H*/
4.马达动作部分
bsp_motor.c
#include "bsp_motor.h"
//马达控制函数,第一个参数为选定哪个马达,第二个参数是选定马达状态
void MotorCtrl(uint32_t motornum,uint32_t state)
{
if(motornum == LEFT_FRONT) //左前马达1
{
switch(state)
{
case OFF:
F_AIN1(LOW);
F_AIN2(LOW);
break;
case FORWARD:
F_AIN1(HIGH);
F_AIN2(LOW);
break;
case REVERSE:
F_AIN1(LOW);
F_AIN2(HIGH);
break;
case BRAKE:
F_AIN1(HIGH);
F_AIN2(HIGH);
break;
default:
break;
}
}
else if(motornum == RIGHT_FRONT) //右前马达2
{
switch(state)
{
case OFF:
F_BIN1(LOW);
F_BIN2(LOW);
break;
case FORWARD:
F_BIN1(HIGH);
F_BIN2(LOW);
break;
case REVERSE:
F_BIN1(LOW);
F_BIN2(HIGH);
break;
case BRAKE:
F_BIN1(HIGH);
F_BIN2(HIGH);
break;
default:
break;
}
}
else if(motornum == LEFT_REAR) //左后马达3
{
switch(state)
{
case OFF:
R_AIN1(LOW);
R_AIN2(LOW);
break;
case FORWARD:
R_AIN1(HIGH);
R_AIN2(LOW);
break;
case REVERSE:
R_AIN1(LOW);
R_AIN2(HIGH);
break;
case BRAKE:
R_AIN1(HIGH);
R_AIN2(HIGH);
break;
default:
break;
}
}
else if(motornum == RIGHT_REAR) //右后马达4
{
switch(state)
{
case OFF:
R_BIN1(LOW);
R_BIN2(LOW);
break;
case FORWARD:
R_BIN1(HIGH);
R_BIN2(LOW);
break;
case REVERSE:
R_BIN1(LOW);
R_BIN2(HIGH);
break;
case BRAKE:
R_BIN1(HIGH);
R_BIN2(HIGH);
break;
default:
break;
}
}
}
/*马达全部关闭函数*/
void MotorAllOFF(void)
{
MotorCtrl(LEFT_FRONT,OFF);
MotorCtrl(LEFT_REAR,OFF);
MotorCtrl(RIGHT_FRONT,OFF);
MotorCtrl(RIGHT_REAR,OFF);
}
bsp_motor.h
#ifndef __BSP_MOTOR_H
#define __BSP_MOTOR_H
#include "bsp_tb6612.h"
/*H桥两端电平高低控制*/
#define HIGH 1
#define LOW 0
/*TB6612模块1,驱动前轮 F*/
/*AIN1*/
#define F_AIN1(a) if(a) GPIO_SetBits(TB6612_F_GPIO_AIN1_PORT, TB6612_F_GPIO_AIN1_PIN); \
else GPIO_ResetBits(TB6612_F_GPIO_AIN1_PORT, TB6612_F_GPIO_AIN1_PIN)
/*AIN2*/
#define F_AIN2(a) if(a) GPIO_SetBits(TB6612_F_GPIO_AIN2_PORT, TB6612_F_GPIO_AIN2_PIN); \
else GPIO_ResetBits(TB6612_F_GPIO_AIN2_PORT, TB6612_F_GPIO_AIN2_PIN)
/*BIN1*/
#define F_BIN1(a) if(a) GPIO_SetBits(TB6612_F_GPIO_BIN1_PORT, TB6612_F_GPIO_BIN1_PIN); \
else GPIO_ResetBits(TB6612_F_GPIO_BIN1_PORT, TB6612_F_GPIO_BIN1_PIN)
/*BIN2*/
#define F_BIN2(a) if(a) GPIO_SetBits(TB6612_F_GPIO_BIN2_PORT, TB6612_F_GPIO_BIN2_PIN); \
else GPIO_ResetBits(TB6612_F_GPIO_BIN2_PORT, TB6612_F_GPIO_BIN2_PIN)
/*TB6612模块2,驱动后轮 R*/
/*AIN1*/
#define R_AIN1(a) if(a) GPIO_SetBits(TB6612_R_GPIO_AIN1_PORT, TB6612_R_GPIO_AIN1_PIN); \
else GPIO_ResetBits(TB6612_R_GPIO_AIN1_PORT, TB6612_R_GPIO_AIN1_PIN)
/*AIN2*/
#define R_AIN2(a) if(a) GPIO_SetBits(TB6612_R_GPIO_AIN2_PORT, TB6612_R_GPIO_AIN2_PIN); \
else GPIO_ResetBits(TB6612_R_GPIO_AIN2_PORT, TB6612_R_GPIO_AIN2_PIN)
/*BIN1*/
#define R_BIN1(a) if(a) GPIO_SetBits(TB6612_R_GPIO_BIN1_PORT, TB6612_R_GPIO_BIN1_PIN); \
else GPIO_ResetBits(TB6612_R_GPIO_BIN1_PORT, TB6612_R_GPIO_BIN1_PIN)
/*BIN2*/
#define R_BIN2(a) if(a) GPIO_SetBits(TB6612_R_GPIO_BIN2_PORT, TB6612_R_GPIO_BIN2_PIN); \
else GPIO_ResetBits(TB6612_R_GPIO_BIN2_PORT, TB6612_R_GPIO_BIN2_PIN)
/*MotorCtrl(uint32_t motornum,uint32_t state)函数的参数宏定义*/
#define LEFT_FRONT 1 //马达1(AIN、左前轮)
#define RIGHT_FRONT 2 //马达2(BIN、右前轮)
#define LEFT_REAR 3 //马达3(AIN、左后轮)
#define RIGHT_REAR 4 //马达4(BIN、右后轮)
#define OFF 0 //停止转动
#define FORWARD 1 //正转
#define REVERSE 2 //反转
#define BRAKE 3 //制动
void MotorCtrl(uint32_t motornum,uint32_t state);
void MotorAllOFF(void);
#endif /*__BSP_MOTOR_H*/
5.接收中断部分
stm32f10x_it.h
#include "bsp_usart.h"
uint8_t rx_data;
uint32_t rx_end;
void USART3_IRQHandler(void)
{
if(USART_GetITStatus(USART3,USART_IT_RXNE) != RESET)
{
rx_data = USART_ReceiveData(USART3); //接收到的数据放入rx_data
rx_end = 1;
}
USART_ClearITPendingBit(USART3,USART_IT_RXNE); //清除中断待处理位
}6.最后是遥控控制小车部分
car_ctrl.c
#include "car_ctrl.h"
#include "bsp_usart.h"
#include "bsp_motor.h"
extern uint8_t rx_end;
extern uint8_t rx_data;
void RUN_Prg(void)
{
if(rx_end)
{
rx_end = 0;
if(rx_data == 'U') //前进 (左前、左后轮反转, 右前、右后轮子正转)
{
MotorCtrl(LEFT_FRONT,REVERSE);
MotorCtrl(LEFT_REAR,REVERSE);
MotorCtrl(RIGHT_FRONT,FORWARD);
MotorCtrl(RIGHT_REAR,FORWARD);
}
else if(rx_data == 'L') //左转 (左前、左后轮正转, 右前、右后轮子正转)
{
MotorCtrl(LEFT_FRONT,FORWARD);
MotorCtrl(LEFT_REAR,FORWARD);
MotorCtrl(RIGHT_FRONT,FORWARD);
MotorCtrl(RIGHT_REAR,FORWARD);
}
else if(rx_data == 'R') //右转 (左前、左后轮反转, 右前、右后轮子反转)
{
MotorCtrl(LEFT_FRONT,REVERSE);
MotorCtrl(LEFT_REAR,REVERSE);
MotorCtrl(RIGHT_FRONT,REVERSE);
MotorCtrl(RIGHT_REAR,REVERSE);
}
else if(rx_data == 'D') //后退 (左前、左后轮正转, 右前、右后轮子反转)
{
MotorCtrl(LEFT_FRONT,FORWARD);
MotorCtrl(LEFT_REAR,FORWARD);
MotorCtrl(RIGHT_FRONT,REVERSE);
MotorCtrl(RIGHT_REAR,REVERSE);
}
else if(rx_data == 'B') //刹车
{
MotorCtrl(LEFT_FRONT,BRAKE);
MotorCtrl(LEFT_REAR,BRAKE);
MotorCtrl(RIGHT_FRONT,BRAKE);
MotorCtrl(RIGHT_REAR,BRAKE);
}
else if(rx_data == 'u'|'l'|'r'|'d'|'S'|'s'|'b')//前进|左转|右转|后退|关闭电机按下/松掉|刹车键松掉后都关闭电机
{
MotorCtrl(LEFT_FRONT,OFF);
MotorCtrl(LEFT_REAR,OFF);
MotorCtrl(RIGHT_FRONT,OFF);
MotorCtrl(RIGHT_REAR,OFF);
}
}
}
PS:软件及接线图、原理图、芯片手册等资料都打包在文章末尾的下载链接中!!!?
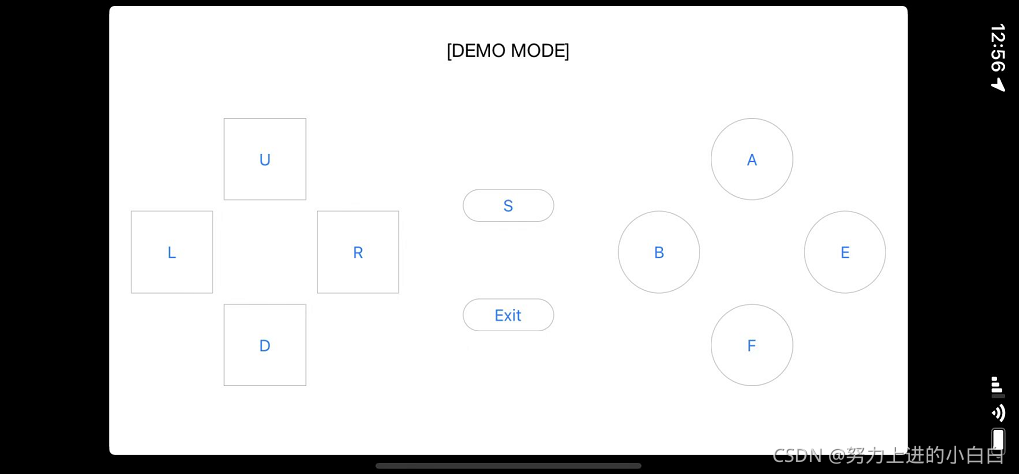
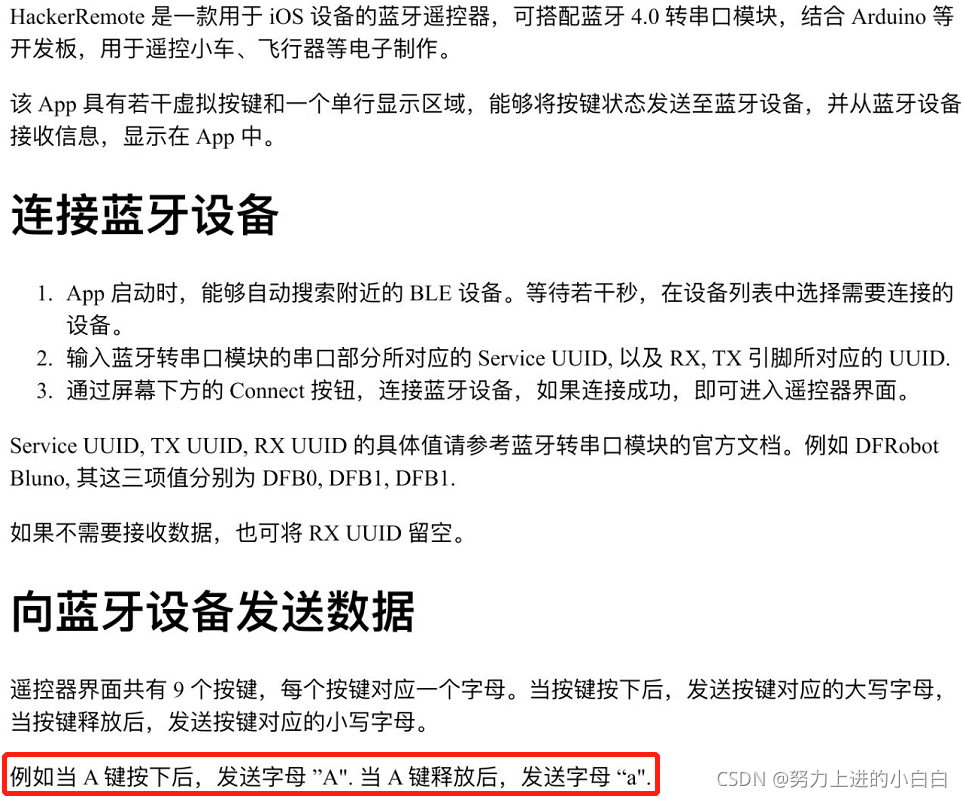
6.APP通信协议介绍
软件说明↓↓↓↓↓↓↓红框内容就是很简单的通信协议了
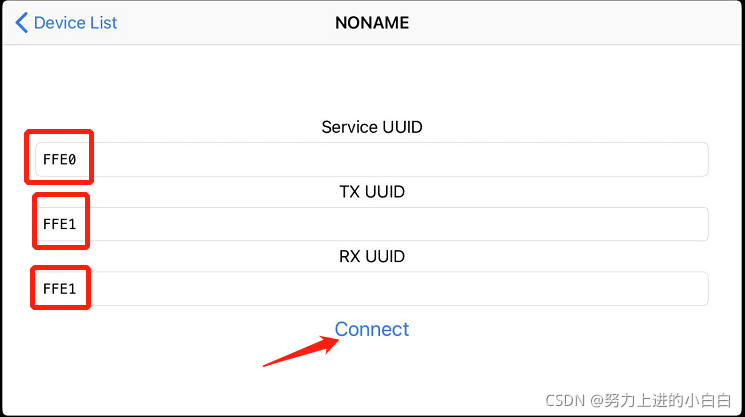
?刷新列表,找到你蓝牙模块的名字,点进去如下图
把Service UUID、TX UUID、RX UUID改成下图框里的默认值,点击连接就好了
连上之后蓝牙模块蓝灯长亮,app界面如下图。好了,可以愉快的遥控小车了~~~