相比树莓派0、1、2 以及 3 的双串口 UART0(PL011)和 UART1(mini UART),树莓派 4 中新增了 4 个 PL011 串口共计有 6 个 UART,整理此笔记用作记录和配置参考。
注意,目前搜到的大多数描述树莓派 4 串口的文章,大多数开头都是禁用下蓝牙,这个做法针对树莓派0-3 是必须的,因为本身串口不够用,但对树莓派 4 来说并不需要,因为有额外 4 个串口可以利用,默认配置好的两串口一个用于蓝牙(UART0)另一个是 miniUART 可以保留设置。此方面的文章大多都是一个流程,原因是参考的最初版本是树莓派 3 的设置;树莓派 4 的额外串口设置在树莓派论坛中可以看到相关的介绍,外面的文章不太多。
UART 配置
1. 展示所有串口命令
dtoverlay -a | grep uart
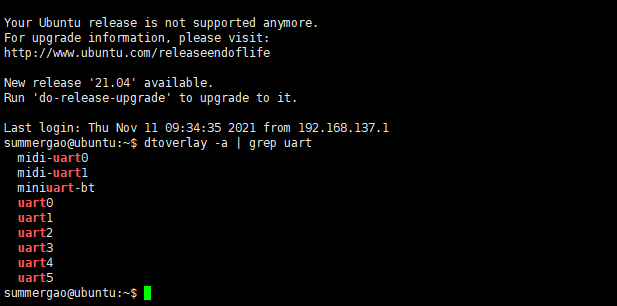
上图展示 pi4 中所有串口
2、配置开启串口 UART2-5
编辑 config.txt 命令
vim /boot/firmware/config.txt
在文件结尾添加如下:
dtoverlay=uart2
dtoverlay=uart3
dtoverlay=uart4
dtoverlay=uart5
保存并退出
重启系统后查看是否生效:
ls /dev/ttyAMA*
结果显示如下:

各 UART 串口与 GPIO(对应的是BCM编码) 对应关系:
UART0: GPIO14 = TXD0 -> ttyAMA0 GPIO15 = RXD0 -> ttyAMA0
UART2: GPIO0 = TXD2 -> ttyAMA1 GPIO1 = RXD2 -> ttyAMA1
UART3: GPIO4 = TXD3 -> ttyAMA2 GPIO5 = RXD3 -> ttyAMA2
UART4: GPIO8 = TXD4 -> ttyAMA3 GPIO9 = RXD4 -> ttyAMA3
UART5: GPIO12 = TXD5 -> ttyAMA4 GPIO13 = RXD5 -> ttyAMA4

注:UART0 对应的 ttyAMA0,UART1 对应的 ttyS0,UART2 到 UART5 对应的 ttyAMA1 到 ttyAMA4。
4. 测试
4.1 串口自发自收测试
现在我们先测试 UART2 是否启用成功,比较简单的测试方式是将其 TXD 和 RXD 相连,自发自收。
根据上方对应关系,UART2 对应 TXD2 和 RXD2,对应 GPIO0 和 GPIO1,对应 ttyAMA1。
找到对应的 GPIO0 和 GPIO1 针脚连起来:

在树莓派端命令行进入 Python3 环境,通过如下模块和命令自发自收:
pip uninstall serial
pip install pyserial
测试如下:
summergao@ubuntu:/home/summergao# python3
Python 3.8.6 (default, May 27 2021, 13:28:02)
[GCC 10.2.0] on linux
Type "help", "copyright", "credits" or "license" for more information.
>>> import serial
>>> uart2 = serial.Serial(port="/dev/ttyAMA1", baudrate=9600)
>>> uart2.write("Hello World".encode("gbk"))
11
>>> uart2.read(11)
b'Hello World'
>>>
同理,我们可以继续用杜邦线将 GPIO4 和GPIO5 相连测试 UART3;GPIO8 和 GPIO9 相连测试 UART4; GPIO12 和 GPIO13 相连测试 UART5。
summergao@ubuntu:/home/summergao# python3
Python 3.8.6 (default, May 27 2021, 13:28:02)
[GCC 10.2.0] on linux
Type "help", "copyright", "credits" or "license" for more information.
>>> import serial
>>> uart2 = serial.Serial(port="/dev/ttyAMA1", baudrate=9600)
>>> uart2.write("Hello World".encode("gbk"))
11
>>> uart2.read(11)
b'Hello World'
>>> uart3 = serial.Serial(port="/dev/ttyAMA2", baudrate=9600)
>>> uart3.write("Hello No.3".encode("gbk"))
10
>>> uart3.read(10)
b'Hello No.3'
>>> uart4 = serial.Serial(port="/dev/ttyAMA3", baudrate=9600)
>>> uart4.write("Hello No.4".encode("gbk"))
10
>>> uart4.read(10)
b'Hello No.4'
>>> uart5 = serial.Serial(port="/dev/ttyAMA4", baudrate=9600)
>>> uart5.write("Hello No.5".encode("gbk"))
10
>>> uart5.read(10)
b'Hello No.5'
>>>
4.2 串口间通信测试
接下来测试 UART2 和 UART3 间的通信,将 TXD2 连接 RXD3 即 GPIO0 与 GPIO5 相连;将 TXD3 与 RXD2 连接即 GPIO4 与 GPIO1 相连
GPIO0 = TXD2 -> ttyAMA1
GPIO4 = TXD3 -> ttyAMA2
GPIO1 = RXD2 -> ttyAMA1
GPIO5 = RXD3 -> ttyAMA2
summergao@ubuntu:~ $ python3
Python 3.7.3 (default, Jul 25 2020, 13:03:44)
[GCC 8.3.0] on linux
Type "help", "copyright", "credits" or "license" for more information.
>>> import serial
>>> ted = serial.Serial(port="/dev/ttyAMA1", baudrate=9600)
>>> ted3 = serial.Serial(port="/dev/ttyAMA2", baudrate=9600)
>>> ted.write("Msg from UART2...".encode("gbk"))
17
>>> ted3.read(17)
b'Msg from UART2...'
>>> ted3.write("Msg from UART3...".encode("gbk"))
17
>>> ted.read(17)
b'Msg from UART3...'
>>>
UART2 和 UART3 间通信正常。
参考:
树莓派 4 UART 多串口配置通信
https://blog.csdn.net/weixin_40796925/article/details/107907991
官方 UART 配置文档:
https://www.raspberrypi.org/documentation/configuration/uart.md
论坛关于多串口的命令与指引:
https://www.raspberrypi.org/forums/viewtopic.php?t=244827#p1493698