ǰ��
������Ҫ����������� 0.96 �� OLED����ʾ���ּ��ɼ���ʾ��ʪ������
һ��SPIЭ����ʲô?
SPI Э������Ħ��������˾�����ͨѶЭ��(Serial Peripheral Interface),��������Χ�豸�ӿ�,��һ�ָ���ȫ˫����ͨ�����ߡ������㷺��ʹ���� ADC��LCD ���豸�� MCU ��,Ҫ��ͨѶ���ʽϸߵij��ϡ�
SPI������һ��4������,����Ӳ�����ܺ�ǿ,������SPI�йص��������൱��,ʹ���봦����(Central Processing Unit,CPU)�и����ʱ�䴦����������������Ϊ���ּ����õ�����,Խ��Խ���оƬ����������ͨ��Э��,����AT91RM9200��SPI��һ�ָ��١���Ч�ʵĴ��нӿڼ�����ͨ����һ����ģ���һ��������ģ�����,��ģ��ѡ��һ����ģ�����ͬ��ͨ��,�Ӷ�������ݵĽ�����SPI��һ�����νṹ,ͨ��ʱ��Ҫ����4����(��ʵ���ڵ�����ʱ3����Ҳ����) [1] ��
SPI��ͨ��ԭ���ܼ�,�������ӷ�ʽ����,����ģʽͨ����һ�����豸��һ���������豸,��Ҫ����4����,��ʵ��3��Ҳ����(������ʱ)��Ҳ�����л���SPI���豸���е�,������MISO(���豸��������)��MOSI(���豸�������)��SCLK(ʱ��)��CS(Ƭѡ)��
(1)MISO�C Master Input Slave Output,���豸��������,���豸�������;
(2)MOSI�C Master Output Slave Input,���豸�������,���豸��������;
(3)SCLK �C Serial Clock,ʱ���ź�,�����豸����;
(4)CS �C Chip Select,���豸ʹ���ź�,�����豸���ơ�
����,CS�Ǵ�оƬ�Ƿ���оƬѡ�еĿ����ź�,Ҳ����˵ֻ��Ƭѡ�ź�ΪԤ�ȹ涨��ʹ���ź�ʱ(�ߵ�λ��͵�λ),��оƬ�Դ˴�оƬ�IJ�������Ч�����ʹ��ͬһ�����������Ӷ��SPI�豸��Ϊ���ܡ�
����������ͨѶ��3�����ˡ�ͨѶ��ͨ�����ݽ�����ɵ�,������Ҫ֪��SPI�Ǵ���ͨѶЭ��,Ҳ����˵������һλһλ�Ĵ���ġ������SCLKʱ���ߴ��ڵ�ԭ��,��SCLK�ṩʱ������,SDI,SDO����ڴ�����������ݴ��䡣�������ͨ�� SDO��,������ʱ�������ػ��½���ʱ�ı�,�ڽ����ŵ��½��ػ������ر���ȡ�����һλ���ݴ���,����Ҳʹ��ͬ��ԭ�������,������Ҫ8��ʱ���źŵĸı�(���غ�����Ϊһ��),�������8λ���ݵĴ��䡣
ʱ���ź���SCLKֻ�������豸����,���豸���ܿ��ơ�ͬ��,��һ������SPI���豸��,������һ�����豸�������Ĵ��䷽ʽ��һ���ŵ�,������λ�Ĵ�������п�����ͣ,Ҳ����ʱ�ӵ����ڿ���Ϊ���ȿ�,��Ϊʱ���������豸����,��û��ʱ������ʱ,���豸���ɼ��������ݡ�SPI����һ�����ݽ���Э��:��ΪSPI���������������߶���,��������ͬʱ������ݵ�����������оƬ���ɵ�SPI����ͬ��ʱ�Ӽ��Ժ���λ����ͨ���Ĵ�������,IOģ���SPI����ͬ��ʱ����Ҫ���ݴ��豸֧�ֵ�ʱ�Ӽ��Ժ���λ��ͨѶ��
���,SPI�ӿڵ�һ��ȱ��:û��ָ����������,û��Ӧ�����ȷ���Ƿ���յ����ݡ�
SPI��Ƭѡ��������ѡ��16������,��ʱPCS���=NPCS,˵NPCS03��4-16������,�������������Ҫ���4-16������,������������ΪNPCS03,�������16�������ѡ��
����ʵ�鲽��
1.ʵ����
Ұ�� stm32 ָ���߿�����
ST-LINK V2 STM8/STM32�����������
0.96��OLED��ʾ��ģ��0.91 1.3��Һ������ԭ��ͼ12864�� IIC/SPI
Keil5 MDK
Ұ�ڵ�������
��������������:https://blog.csdn.net/ssj925319/article/details/111588662?spm=1001.2014.3001.5502
2.����ʵ��
��������Դ��:
����:https://pan.baidu.com/s/1HS33ftk3Pb7nWJRhBTLqUw
��ȡ��:57x8
��ѹ����,�� 1-Demo ��ѡ����Ӧ����Ŀ,
������ѡ����� Demo_STM32 �µ� 0.96inch_OLED_Demo_STM32F103ZET6_Hardware_4-wire_SPI ,
��ͼ��ʾ:

֮��˫���� PROJECT �µĹ��� OLED.uvprojx ����,��ͼ��ʾ:

������������Ҫ��ֲ����,������ֲ�¶����ݴ����е�bsp_i2c.h�ļ�
��������:
#ifndef __BSP_I2C_H
#define __BSP_I2C_H
#include "sys.h"
#include "delay.h"
#include "usart.h"
#define SDA_IN() {GPIOB->CRL&=0X0FFFFFFF;GPIOB->CRL|=(u32)8<<28;}
//CRL = 0000 1111 1111 1111 1111 1111 1111 1111
//8<<28 = 1000 1111 1111 1111 1111 1111 1111 1111
//CRL = 1000 1111 1111 1111 1111 1111 1111 1111 = 0x8fffffff ��ʾ SDA ����
#define SDA_OUT() {GPIOB->CRL&=0X0FFFFFFF;GPIOB->CRL|=(u32)3<<28;}
//CRL = 0x3fffffff ��ʾ SDA ���
#define IIC_SCL PBout(6) //SCL
#define IIC_SDA PBout(7) //SDA
#define READ_SDA PBin(7) //SDA ���ݶ�ȡ 7 �ܽ�
void IIC_Init(void);
void read_AHT20_once(void);
void reset_AHT20(void);
void init_AHT20(void);
void startMeasure_AHT20(void);
void read_AHT20(void);
uint8_t Receive_ACK(void);
void Send_ACK(void);
void SendNot_Ack(void);
void I2C_WriteByte(uint8_t input);
uint8_t I2C_ReadByte(void);
void set_AHT20sendOutData(void);
void I2C_Start(void);
void I2C_Stop(void);
#endif
֮��������Ҫ��ֲbsp_i2c.c�ļ�(�˴���ø�������Ϊ AHT20_sys.h,��Ȼ������)
��������:
#include "bsp_i2c.h"
#include "delay.h"
#include "string.h"
uint8_t ack_status=0;
uint8_t readByte[6];
uint32_t H1=0; //Humility
uint32_t T1=0; //Temperature
uint8_t AHT20_OutData[4];
/****************
*��ʼ�� I2C ����
****************/
void IIC_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
//���ø��� APB (APB2) ��Χʱ��
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE );
//GPIO ����
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//��ʼ�� SCL(Pin6)�ߵ�ƽ
IIC_SCL=1;
//��ʼ�� SDA(Pin7)�ߵ�ƽ
IIC_SDA=1;
}
/*********************
*AHT20 ���ݲ����ܺ���
*********************/
void read_AHT20_once(void)
{
printf("��ȡ������");
//��ʱ 10 ��
delay_ms(10);
//��������ǰ��������������������λ
reset_AHT20();
delay_ms(10);
//�鿴ʹ��λ
init_AHT20();
delay_ms(10);
//��������
startMeasure_AHT20();
delay_ms(80);
//������
read_AHT20();
delay_ms(5);
}
void reset_AHT20(void)
{
//���ݴ��俪ʼ�ź�
I2C_Start();
//��������
I2C_WriteByte(0x70);
//���� ACK �ź�
ack_status = Receive_ACK();
//�ж� ACK �ź�
if(ack_status)
{
printf(">");
}
else
printf("��");
//��������λ����(����������ϵͳ)
I2C_WriteByte(0xBA);
//���� ACK �ź�
ack_status = Receive_ACK();
//�ж� ACK �ź�
if(ack_status)
printf(">");
else
printf("��");
//ֹͣ I2C Э��
I2C_Stop();
}
//0x70 ��> 0111 0000 ǰ��λ��ʾ I2C ��ַ,�ڰ�λΪ0,��ʾ write
//0xE1 ��> ��״̬�ֵ�Уʹ��λBit[3]�Ƿ�Ϊ 1
//0x08 0x00 ��> 0xBE �������������,��� AHT20 �ο��ֲ�
void init_AHT20(void)
{
//���俪ʼ
I2C_Start();
//� 0x70 ����
I2C_WriteByte(0x70);
//���� ACK �ź�
ack_status = Receive_ACK();
//�ж� ACK �ź�
if(ack_status)
printf(">");
else
printf("��");
//� 0xE1 ����
I2C_WriteByte(0xE1);
ack_status = Receive_ACK();
if(ack_status)
printf(">");
else
printf("��");
//� 0x08 ����
I2C_WriteByte(0x08);
ack_status = Receive_ACK();
if(ack_status)
printf(">");
else
printf("��");
//� 0x00 ����
I2C_WriteByte(0x00);
ack_status = Receive_ACK();
if(ack_status)
printf(">");
else
printf("��");
//ֹͣ I2C Э��
I2C_Stop();
}
//0x70 ��> 0111 0000 ǰ��λ��ʾ I2C ��ַ,�ڰ�λΪ0,��ʾ write
//0xAC ��> ��������
//0x33 0x00 ��> 0xAC �������������,��� AHT20 �ο��ֲ�
void startMeasure_AHT20(void)
{
//���� I2C ��
I2C_Start();
I2C_WriteByte(0x70);
ack_status = Receive_ACK();
if(ack_status)
printf(">");
else
printf("��");
I2C_WriteByte(0xAC);
ack_status = Receive_ACK();
if(ack_status)
printf(">");
else
printf("��");
I2C_WriteByte(0x33);
ack_status = Receive_ACK();
if(ack_status)
printf(">");
else
printf("��");
I2C_WriteByte(0x00);
ack_status = Receive_ACK();
if(ack_status)
printf(">");
else
printf("��");
I2C_Stop();
}
void read_AHT20(void)
{
uint8_t i;
//��ʼ�� readByte ����
for(i=0; i<6; i++)
{
readByte[i]=0;
}
I2C_Start();
//ͨ������ 0x71 ���Ի�ȡһ���ֽڵ�״̬��
I2C_WriteByte(0x71);
ack_status = Receive_ACK();
//���� 6 �� 8 bit������
readByte[0]= I2C_ReadByte();
//���� ACK �ź�
Send_ACK();
readByte[1]= I2C_ReadByte();
Send_ACK();
readByte[2]= I2C_ReadByte();
Send_ACK();
readByte[3]= I2C_ReadByte();
Send_ACK();
readByte[4]= I2C_ReadByte();
Send_ACK();
readByte[5]= I2C_ReadByte();
//���� NACK �ź�
SendNot_Ack();
I2C_Stop();
//��ʪ�ȵĶ��������ݴ���
//0x68 = 0110 1000
//0x08 = 0000 1000
if( (readByte[0] & 0x68) == 0x08 )
{
H1 = readByte[1];
//H1 ���� 8 ��� readByte[2] ���
H1 = (H1<<8) | readByte[2];
H1 = (H1<<8) | readByte[3];
//H1 ���� 4 λ
H1 = H1>>4;
H1 = (H1*1000)/1024/1024;
T1 = readByte[3];
//������
T1 = T1 & 0x0000000F;
T1 = (T1<<8) | readByte[4];
T1 = (T1<<8) | readByte[5];
T1 = (T1*2000)/1024/1024 - 500;
AHT20_OutData[0] = (H1>>8) & 0x000000FF;
AHT20_OutData[1] = H1 & 0x000000FF;
AHT20_OutData[2] = (T1>>8) & 0x000000FF;
AHT20_OutData[3] = T1 & 0x000000FF;
}
else
{
AHT20_OutData[0] = 0xFF;
AHT20_OutData[1] = 0xFF;
AHT20_OutData[2] = 0xFF;
AHT20_OutData[3] = 0xFF;
printf("����㨹��?");
}
printf("���!\n");
printf("----�¶�:%d%d.%d ��C\n",T1/100,(T1/10)%10,T1%10);
printf("----ʪ��:%d%d.%d %%",H1/100,(H1/10)%10,H1%10);
printf("\n\n");
}
//���� ACK �ź�
uint8_t Receive_ACK(void)
{
uint8_t result=0;
uint8_t cnt=0;
//�� SCL �͵�ƽ
IIC_SCL = 0;
//���� SDA Ϊ��ȡ����ģʽ
SDA_IN();
delay_us(4);
//�� SCL �ߵ�ƽ
IIC_SCL = 1;
delay_us(4);
//�ȴ��ӻ����� ACK �ź�,�ȴ�ʱ��Ϊ 100 ��ѭ��
while(READ_SDA && (cnt<100))
{
cnt++;
}
IIC_SCL = 0;
delay_us(4);
//����ڵȴ�ʱ����,����Ϊ 1
if(cnt<100)
{
result=1;
}
return result;
}
//���� ACK �ź�
void Send_ACK(void)
{
//���� SDA Ϊд����ģʽ
SDA_OUT();
IIC_SCL = 0;
delay_us(4);
//�� SDA Ϊ�͵�ƽ
IIC_SDA = 0;
delay_us(4);
IIC_SCL = 1;
delay_us(4);
IIC_SCL = 0;
delay_us(4);
SDA_IN();
}
//���� NACK �ź�
void SendNot_Ack(void)
{
//���� SDA Ϊд����ģʽ
SDA_OUT();
IIC_SCL = 0;
delay_us(4);
IIC_SDA = 1;
delay_us(4);
IIC_SCL = 1;
delay_us(4);
IIC_SCL = 0;
delay_us(4);
IIC_SDA = 0;
delay_us(4);
}
//����һ���ֽ�����
void I2C_WriteByte(uint8_t input)
{
uint8_t i;
//���� SDA Ϊд����ģʽ
SDA_OUT();
//ѭ�����Ʒ��� 8 bit����
for(i=0; i<8; i++)
{
IIC_SCL = 0;
delay_ms(5);
if(input & 0x80)
{
IIC_SDA = 1;
}
else
{
IIC_SDA = 0;
}
IIC_SCL = 1;
delay_ms(5);
input = (input<<1);
}
IIC_SCL = 0;
delay_us(4);
SDA_IN();
delay_us(4);
}
//ѭ����� SDA �ĵ�ƽ״̬���洢����
uint8_t I2C_ReadByte(void)
{
uint8_t resultByte=0;
uint8_t i=0, a=0;
IIC_SCL = 0;
SDA_IN();
delay_ms(4);
//ѭ�����
for(i=0; i<8; i++)
{
IIC_SCL = 1;
delay_ms(3);
a=0;
if(READ_SDA)
{
a=1;
}
else
{
a=0;
}
resultByte = (resultByte << 1) | a;
IIC_SCL = 0;
delay_ms(3);
}
SDA_IN();
delay_ms(10);
return resultByte;
}
//���� I2C Э�鿪ʼ
void I2C_Start(void)
{
SDA_OUT();
IIC_SCL = 1;
delay_ms(4);
//SDA �� 1 ����Ϊ 0 ���������
//��ʾ��ʼ�ź�
IIC_SDA = 1;
delay_ms(4);
IIC_SDA = 0;
delay_ms(4);
//SCL ��Ϊ 0
//��ʾ SDA ������Ч,��ʱ SDA ���Խ��е�ƽ�л�
IIC_SCL = 0;
delay_ms(4);
}
//���� I2C Э��ֹͣ
void I2C_Stop(void)
{
SDA_OUT();
//SCL �ߵ�ƽ,SDA �ߵ�ƽ
//ֹͣʱ��
IIC_SDA = 0;
delay_ms(4);
IIC_SCL = 1;
delay_ms(4);
//SDA �л����ߵ�ƽ
IIC_SDA = 1;
delay_ms(4);
}
Ȼ�����ǽ���sys.h�ļ�����ֲ
��������:
#ifndef __SYS_H
#define __SYS_H
#include "stm32f10x.h"
#define SYSTEM_SUPPORT_UCOS 0
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
#define GPIOA_ODR_Addr (GPIOA_BASE+12) //0x4001080C
#define GPIOB_ODR_Addr (GPIOB_BASE+12) //0x40010C0C
#define GPIOC_ODR_Addr (GPIOC_BASE+12) //0x4001100C
#define GPIOD_ODR_Addr (GPIOD_BASE+12) //0x4001140C
#define GPIOE_ODR_Addr (GPIOE_BASE+12) //0x4001180C
#define GPIOF_ODR_Addr (GPIOF_BASE+12) //0x40011A0C
#define GPIOG_ODR_Addr (GPIOG_BASE+12) //0x40011E0C
#define GPIOA_IDR_Addr (GPIOA_BASE+8) //0x40010808
#define GPIOB_IDR_Addr (GPIOB_BASE+8) //0x40010C08
#define GPIOC_IDR_Addr (GPIOC_BASE+8) //0x40011008
#define GPIOD_IDR_Addr (GPIOD_BASE+8) //0x40011408
#define GPIOE_IDR_Addr (GPIOE_BASE+8) //0x40011808
#define GPIOF_IDR_Addr (GPIOF_BASE+8) //0x40011A08
#define GPIOG_IDR_Addr (GPIOG_BASE+8) //0x40011E08
#define PAout(n) BIT_ADDR(GPIOA_ODR_Addr,n)
#define PAin(n) BIT_ADDR(GPIOA_IDR_Addr,n)
#define PBout(n) BIT_ADDR(GPIOB_ODR_Addr,n)
#define PBin(n) BIT_ADDR(GPIOB_IDR_Addr,n)
#define PCout(n) BIT_ADDR(GPIOC_ODR_Addr,n)
#define PCin(n) BIT_ADDR(GPIOC_IDR_Addr,n)
#define PDout(n) BIT_ADDR(GPIOD_ODR_Addr,n)
#define PDin(n) BIT_ADDR(GPIOD_IDR_Addr,n)
#define PEout(n) BIT_ADDR(GPIOE_ODR_Addr,n)
#define PEin(n) BIT_ADDR(GPIOE_IDR_Addr,n)
#define PFout(n) BIT_ADDR(GPIOF_ODR_Addr,n)
#define PFin(n) BIT_ADDR(GPIOF_IDR_Addr,n)
#define PGout(n) BIT_ADDR(GPIOG_ODR_Addr,n)
#define PGin(n) BIT_ADDR(GPIOG_IDR_Addr,n)
void NVIC_Configuration(void);
#endif
֮�����ǻ���Ҫ��ֲsys.c�ļ�(�˴���ø�������Ϊ AHT20_sys.c,��Ȼ������)
��������:
#include "sys.h"
void NVIC_Configuration(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
}
������Ǿ�����������صĴ���,�õ������յĴ���:
��������:https://pan.baidu.com/s/1fWBFrqD7pWfxJk8GtWdVnA
��ȡ��:tzrh
3.��ȡ������ģ
Ҫ���� OLED ����ʾӢ�ġ�����,����ֱ�������ʾ,��Ҫ������ʾ����,�ͱ���Ҫ�����Ľ��б���ɵ���,���������Ҫ��װ���µ�����
��ģ������������:https://pan.baidu.com/s/1GRe2X3p2ETJJEFwXsnV1sw
��ȡ��:fn8i
֮�����Ǵ�ѹ����,���.exe����,��ͼ��ʾ:
Ȼ���������������������뿴��������,����:�Ų���ӭ�������콻ͨ��ѧ
��ͼ��ʾ:
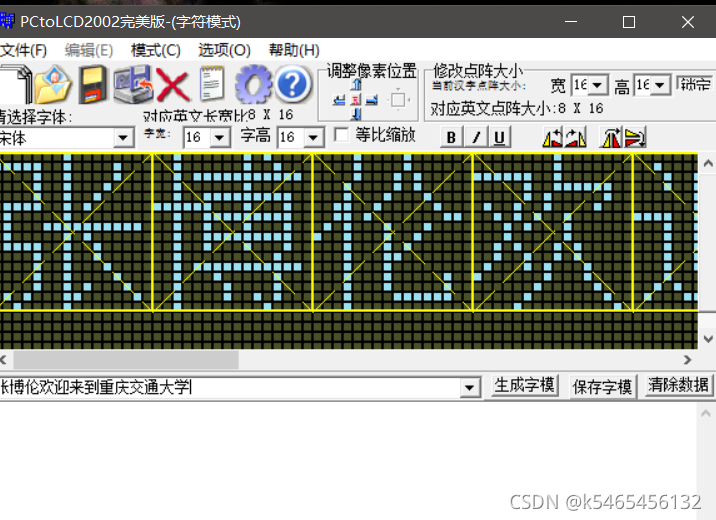
֮�� ������Ҫ��������������� 90 ��,Ȼ����ɽ�·�ת,����,OLED ����ʾ�����ֲ��������,��ͼ��ʾ:


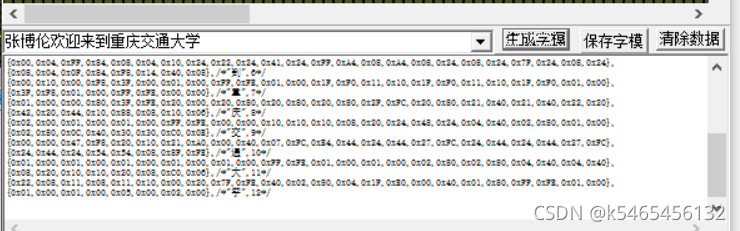
Ȼ�����ǵ��������ģ,��ͼ��ʾ:
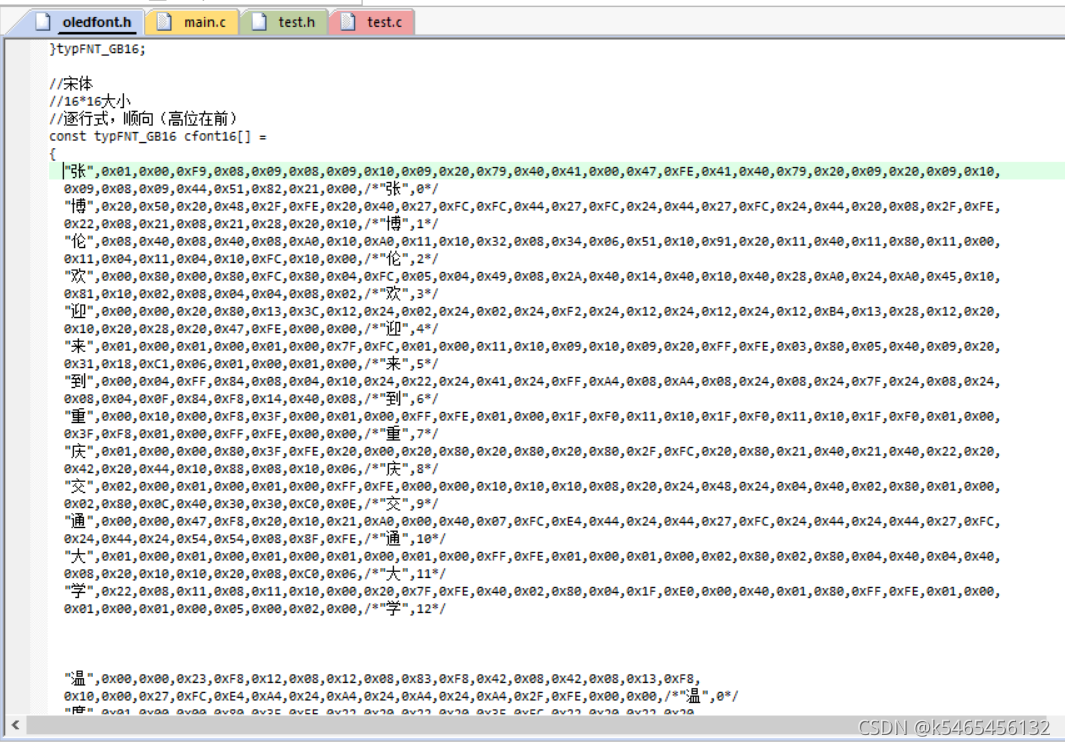
֮�����Ǹ���������ɵĴ���,���ӵ�gui.c ���и� oledfont.h ͷ�ļ�,��,�� cfont16[] �����ڵ������ij��Լ����������ֵ���(ע���ʽ)
��ͼ��ʾ:
֮�������ٰ��¶�ʪ�ȵ���ͬ���ķ�ʽ�����ȥ
Ȼ�����ǽ��б��벢����.hex�ļ�

֮�����Ǵ���¼����,�ѳ����ս�ȥ
���ʱ������������һЩ����,Ӧ�������,���������,���ǿ��Բ�����ͼ:

֮�������ǽ�����¼,Ч������ͼ��ʾ:

�ܽ�
�ܵ���˵��,����ij���Ĺ��̱ȽϷ���,��Ҫ���Ӻܶ��ļ����ĺܶ����,�������˴��еİ���,���������������ˮ,Ч��Ҳ�Ƿdz�����