����M263KIAAEоƬ
- 1,PDMA
- 2,SPI
- 3,EPWM
- 4,I^2^C����
- 5,SysTick(System Timer)
- 6,UART
- 6.1,����
- 6.2,�ص�
- 6.3,����ͼ
- 6.4,��������
- 6.5,����˵��
- 6.5.1,UART�����������ʷ�����
- 6.5.2,UART�����������ʲ���
- 6.5.3,UART�������Զ������ʹ���ģʽ
- 6.5.4,UART�����������ӳ�ʱ��ֵ
- 6.5.5,UART������FIFO���ƺ�״̬
- 6.5.6,UART���������ѹ���
- 6.5.7,UART�������жϺ�״̬
- 6.5.8,UART����ģʽ
- 6.5.9,IrDA����ģʽ
- 6.5.10,LIN����ģʽ(���ػ�������)
- 6.5.11,RS-485����ģʽ
- 6.5.11,PDMA���亯��
- 6.5.12,Register Map and Register Description
1,PDMA
Peripheral Direct Memory Access (PDMA)
����ֱ�Ӵ洢����ȡ(PDMA) �����������ṩ�������ݴ��䡣PDMA������������û��CPU��Ԥ������½����ݴ�һ����ַ���䵽��һ����ַ���������ĺô��Ǽ�����CPU�Ĺ�������,��Ϊ����Ӧ�ó������˿��е�CPU��Դ��������PDMA������PDMA0��PDMA1��ÿ��PDMA����������8��ͨ��,ÿ��ͨ������ִ�д洢��������֮���洢����洢��֮��Ĵ��䡣
����:
- ֧�� 2PDMA ������,�� PDMA0 �� PDMA1;
- ֧�� 8 ���ɶ������õ�ͨ��;
- ֧�ֿ�ѡ��2�����ȼ�(�̶����ȼ���ѭ�����ȼ�);
- ֧��8λ��16λ��32λ�Ĵ������ݿ���;
- ֧��Դ��Ŀ�ĵ�ַ������С�������ֽڡ����֡��ֻ�������;
- ֧��������USB��ͨ���첽�շ���(Universal Asynchronous
Receiver/Transmitters , UART)��ͨ�ô��п��ƽӿ�(Universal Serial Control
Interface, USCI)��������Χ�ӿ�(Serial Peripheral Interface
,SPI)��EPWM(Enhanced PWM< Pulse Width
Modulation>,��ǿ��������ȵ���)��I2C��I2S����ʱ��(Timer)��ģ��ת����(ADC)����ģת����(DAC)����; - ֧�ַ�ɢ-�ۼ�ģʽ,ͨ��ʹ��������������ִ�и��ӵĴ���;
- ֧�ֵ������ͻ����������;
- ֧��ͨ��0��ͨ��1�ij�ʱ����;
- ֧��ͨ��0��ͨ��5�Ŀ�ȹ���
2,SPI
Serial Peripheral Interface,SPI
��������ӿ�(SPI) ������ͬ����������ͨ��,������ȫ˫�����䡣�豸ͨ��4��˫��ӿ�����/��ģʽͨ�š�M261/M262/M263 ϵ������������ SPI ������,�Դ���Χ�豸���յ�����ִ�д���ת��,�Է��͵���Χ�豸������ִ�в���ת����ÿ�� SPI ��������������Ϊ���豸����豸,��֧�� PDMA �������������ݻ�������ÿ�� SPI ��������֧�� I2S ģʽ�����ⲿ��Ƶ���������
����:
1,SPIģʽ
- �������SPI������
- ֧����ģʽ���ģʽ����
- �����ֵĿ�����λ����8λ��32λ
- �ṩ������4����ȷ��ͺͽ����Ƚ��ȳ�������
- ֧�����λ���Ȼ����λ���ȴ�������
- ֧���ֽ���������
- ֧���ֽڻ��ֹ���ģʽ
- ֧��PDMA����
- ֧��һ������ͨ����˫������
- ֧��ֻ����ģʽ
2, I2Sģʽ
- ֧��������ӻ� -�ܹ�����8λ��16λ��24λ��32λ�Ĵ�����С
- ÿһ�����ṩ����4��FIFO���ݻ�����,һ�����ڷ���,��һ�����ڽ���
- ֧�ֵ���������������Ƶ����
- ֧��PCMģʽA��PCMģʽB��I2S��MSB���������ݸ�ʽ
- ֧������PDMA����,һ�����ڷ���,��һ�����ڽ���
3,EPWM
��оƬ�ṩ����EPWM������-EPWM 0��EPWM 1��
ÿ��EPWM֧��6·EPWM��������벶����һ��12λԤ��Ƶ��,֧��16λEPWM������(��16λ�Ƚ���)�����ʱ�ӡ�
EPWM������֧�ֵ������ݼ��͵����ݼ����������͡�EPWMʹ�ñȽ����ͼ������������¼�����Щ�¼����ڲ���EPWM���塢�жϺʹ����ź�,�Ա�EADC/DAC��ʼת����
EPWM������֧�����ֱ���EPWM���ģʽ:����ģʽ�ͻ���ģʽ,���Ǿ��в�ͬ����ϵ�ṹ�����ڱ����ģʽ�������������:�鹦�ܺ�ͬ�����ܡ������ڶ���ģʽ��ģʽ������Ⱥ�鹦�ܡ�ͬ�����ܽ�����ȫģʽ�����á�����ģʽ�������Ƚ���,��12λ������������������EPWM����;��һ�����ɴ����Ƚ���,��������EADC�Ĵ����źš�
EPWM������Ƶ�Ԫ֧�ּ�������������������κ��ƶ����ܡ�EPWM��������֧�����벶���ܡ�������ͨ����������ԾǨ���½�ԾǨ��ͬʱ��������ԾǨ���½�ԾǨʱ,֧�ֽ�EPWM������ֵ���浽��Ӧ�ļĴ����������ܻ�֧��PDMA����������ݴ��䵽�洢����
4,I2C����
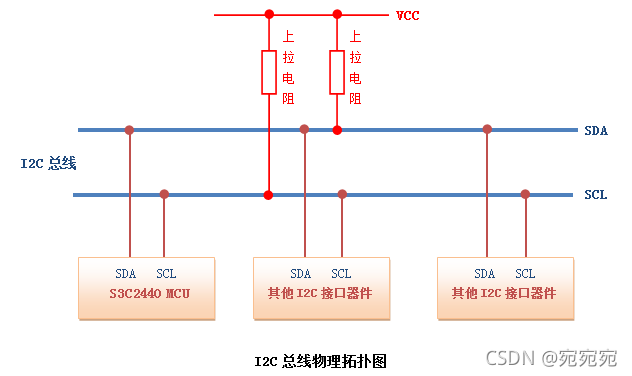
I2C ���������������Ϻܼ�,�� SDA (����������)�� SCL (����ʱ����)������������ɡ�ͨ��ԭ����ͨ���� SCL �� SDA �߸ߵ͵�ƽʱ��Ŀ���,�� ���� I2C ����Э������Ҫ���źŽ������ݵĴ��ݡ������߿���״̬ʱ,��������һ�㱻�������ӵ�������������,���ָߵ�ƽ״̬��
4.1,I2C��������
- I2C �����ϵ�ÿһ���豸��������Ϊ���豸���ߴ��豸,����ÿһ���豸�����Ӧһ��Ψһ�ĵ�ַ(�����豸��ͨ���õ�ַͨ��,��ַ���Դ� I2C �����������ֲ��֪)
- ��ͨ����Ӧ����,��CPU�� I2C ���߽ӿڵ�ģ����Ϊ���豸,�ѹҽ��������ϵ������豸����Ϊ���豸
- I2C �����Ͽɹҽӵ��豸���������ߵ������� 400pF ����,������ҽӵ�����ͬ�ͺŵ�����,����������ַλ������
- I2C �������ݴ��������ڱ�ģʽ�¿ɴ� 100 kbit/s,����ģʽ�¿ɴ� 400 kbit/s,����ģʽ�¿ɴ� 3.4 Mbit/s��һ��ͨ�� I2C ���߽ӿڿɱ��ʱ����ʵ�ִ������ʵĵ���,ͬʱҲ�����ӵ������������ֵ�й�
- I2C �����ϵ����豸����豸֮�����ֽ�(8λ)Ϊ��λ����˫������ݴ���
4.2,I2C������
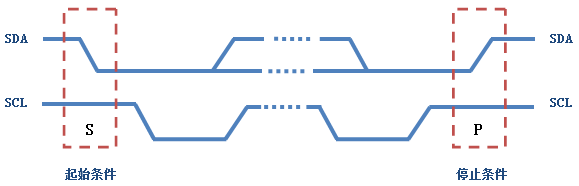
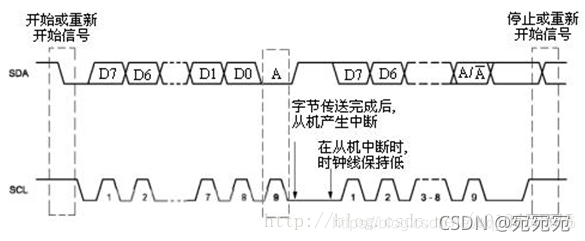
I2C Э��涨,���������ݵĴ��������һ����ʼ�ź���Ϊ��ʼ����,��һ�������ź���Ϊ�����ֹͣ��������ʼ�ͽ����ź����������豸������
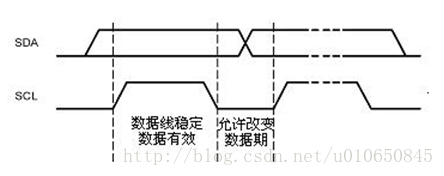
�����ڿ���״̬ʱ,SCL��SDA�������Ÿߵ�ƽ��
��SCLΪ�ߵ�ƽ��SDA�ɸߵ��͵�����,��ʾ����һ����ʼ����;��SCLΪ�߶�SDA�ɵ͵��ߵ�����,��ʾ����һ�� ֹͣ������
����ʼ����������,���ߴ���æ״̬,�ɱ������ݴ���������豸��ռ,���� I2C ��������������;����ֹͣ����������,�������ݴ���������豸���ͷ�����,�����ٴδ��ڿ���״̬����ͼ��ʾ:
4.3,I2C�������ݴ������
4.3.1,���ݴ����������
���ݴ������ֽ�Ϊ��λ�����豸��SCL���ϲ���ÿ��ʱ������Ĺ����н���SDA���ϴ���һ������λ,��һ���ֽڰ�����λ�Ӹ�λ����λ��˳�������,�����Ŵ��豸������SDA��,�ش������豸һ��Ӧ��λ, ��ʱ����Ϊһ���ֽ������ı�������ɡ�
��Ȼ,���������е��ֽڴ��䶼������һ��Ӧ��λ,����:�����豸�����ٽ������豸���͵�����ʱ,���豸���ش�һ���� ��Ӧ��λ�����ݴ���Ĺ�����ͼ��ʾ:
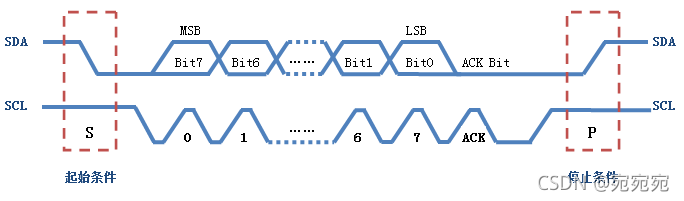
ע:MSBΪ�����Чλ,LSBΪ�����Чλ
����,I2C �����ϵ�ÿһ���豸����Ӧһ��Ψһ�ĵ�ַ,�����豸֮������ݴ����ǽ����ڵ�ַ�Ļ�����,Ҳ����˵,���豸�ڴ�����Ч����֮ǰ Ҫ��ָ�����豸�ĵ�ַ,��ַָ���Ĺ��̺��������ݴ���Ĺ���һ��,ֻ������������豸�ĵ�ַ��7λ��,Ȼ��Э��涨�ٸ���ַ����һ�����λ������ʾ������ ���ݴ���ķ���,0��ʾ���豸����豸д����,1��ʾ���豸����豸�����ݡ���ͼ��ʾ:
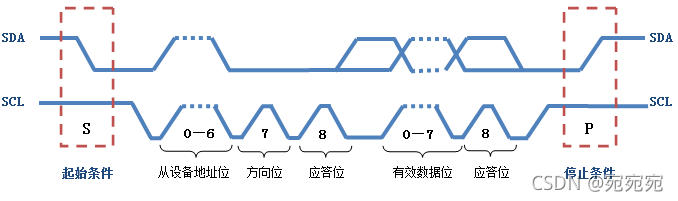
����,��IIC�����ϴ��͵�ÿһλ���ݶ���һ��ʱ���������Ӧ(��ͬ������),����SCL����ʱ�ӵ������,��SDA����λ�ش��д���ÿһλ���ݡ��������ݴ���ʱ,��SCL���ָߵ�ƽ�ڼ�,SDA�ϵĵ�ƽ���뱣���ȶ���ֻ����SCLΪ�͵�ƽ�ڼ�,������SDA�ϵĵ�ƽ�ı�״̬��
��I2C���ߵIJ���ʵ�ʾ��������豸֮��Ķ�д���������¿ɷ�Ϊ�������ֲ������:
-
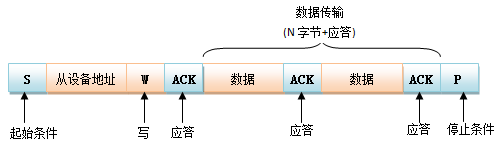
���豸�����豸��д���ݡ����ݴ����ʽ����:
-
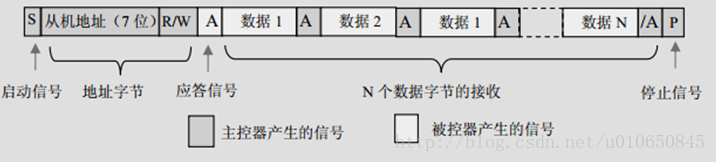
���豸�Ӵ��豸�ж����ݡ����ݴ����ʽ����:
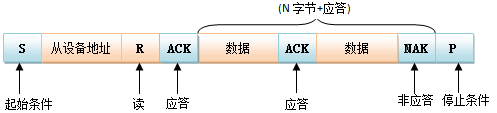
ע:Ӧ���ź�Ϊ�͵�ƽʱ,�涨Ϊ��ЧӦ��λ(ACK���Ӧ��λ),��ʾ�������Ѿ��ɹ��ؽ����˸��ֽ�;Ӧ���ź�Ϊ�ߵ�ƽʱ,�涨Ϊ��Ӧ��λ(NACK),һ���ʾ���������ո��ֽ�û�гɹ���
���һ���������ֽ����ݴ�����Ҫ9��ʱ�����塣����ӻ���Ϊ���շ����������ͷ�Ӧ���ź�,����������Ϊ�˴����ݴ���ʧ��;�����������Ϊ���շ�,�ڴӻ�������������һ���ֽ����ݺ�,��ӻ������˷�Ӧ���ź�,�ӻ�����Ϊ���ݴ������,���ͷ�SDA���������������������������ֹ���ݴ���,��ʱ�������Dz���ֹͣ�ź��ͷ������Dz������¿�ʼ�ź�,��ʼһ���µ�ͨ�š� -
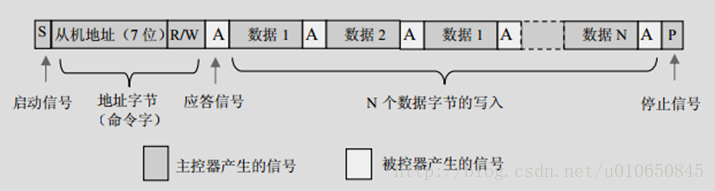
���豸�����豸��д����,Ȼ��������ʼ����,�����ŴӴ��豸�ж�ȡ����;���������豸�Ӵ��豸�ж�����,Ȼ��������ʼ����(�뿪ʼ������ͬ),���������豸�����豸��д���ݡ����ݴ����ʽ����:
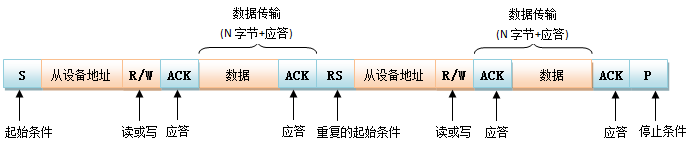
�����ֲ����ڵ������豸ϵͳ��,�ظ��Ŀ�����ʼ��������Ҫ����STOP��ֹ��������ٴο������߸���Ч�ʡ�
ע:�������ݲ��ִӴ��е����� I2C����Э����� ���������õ�
4.3.2,����ȴ�ʱ��
�����������Ҫ�ӳ���һ�������ֽڿ�ʼ���͵�ʱ��,�����ͨ����ʱ����SCL��ƽ���Ͳ��ұ���,ʹ����������ȴ�״̬��һ���������ͷ�ʱ����,���ݴ���͵��Լ�����ȥ,������ʹ�ñ������õ��㹻ʱ��ת���Ѿ��յ��������ֽ�,�������ü������͵������ֽڡ�
����CPU�ı������ڶ��յ��ĵ�ַ�ֽ�����Ӧ��֮��,��Ҫһ����ʱ��ȥִ���жϷ����ӳ���,��������Ƚϵ�ַ��,���Ͱ�SCL��ǯλ�ڵ͵�ƽ��,ֱ������������ͷ�SCL��,����ʹ�������������������ֽڵķ���
4.3.3,���߳�ͻ�������ٲ�
������ijIIC����ϵͳ�д��������������ڵ�,�ֱ��Ϊ������1��������2,��������ݷֱ�ΪDATA1��DATA2,���Ƕ��п������ߵ�����,��ʹ����ŷ������߳�ͻ(��д��ͻ)�Ŀ����ԡ�
������ijһ˲��������������߷����������ź�,����:I2C���ߵġ����롱����,ʹ����������SDA�ϵõ����źŲ�����DATA1��DATA2��������Ľ��
�����߱�������,������1��ͼ�������ݡ�101������,������2��ͼ�������ݡ�100��������
������������ÿ�η���һ������λ��ͬʱ��Ҫ���Լ�����˵��źŵ�ƽ���г��,ֻҪ���Ľ���������Լ�Ԥ�ڵĵ�ƽ���,�ͻ����ռ������,���߿���ȨҲ�͵ò����ö������
������1�ĵ�3λ�������͡�1��,Ҳ�����ڵ�3��ʱ���������ͳ��ߵ�ƽ���ڸ�ʱ�����ڵĸߵ�ƽ�ڼ�,������1�������г��ʱ,�����һ������ƥ��ĵ�ƽ��0��,��ʱ������1ֻ�þ����������߿����;���,������2�ͳ������ߵ�Ωһ������,���߿���ȨҲ�����յó��˲ö����,�Ӷ�ʵ���������ٲõĹ��ܡ�
�����������ٲõ���ɹ��̿��Եó�:�ٲù���������1��������2�����ᶪʧ����;����������û�����ȼ���֮��,���߿���Ȩ������ö��ġ�
ϵͳʵ������ѭ���ǡ��͵�ƽ���ȡ����ٲ�ԭ��,�������и������������ȷ��͵͵�ƽ��������,���������ߵ�ƽ����������ʧȥ���߿���Ȩ
4.3.4,ʱ��ͬ��
�����ijһI2C����ϵͳ�д��������������ڵ�,�ֱ��Ϊ������1��������2,��ʱ������˷ֱ�ΪCLK1��CLK2,���Ƕ��п������ߵ�������
������ijһ�ڼ����������SCL�߷����˲��β�ͬ��ʱ����������CLK1��CLK2,�����߿���Ȩ��û�вö�֮ǰ���������ǿ��ܳ��ֵġ�
����IIC���ߵġ����롱����,ʹ��ʱ����SCL�ϵõ���ʱ���źŲ���,�Ȳ���������1��������CLK1,Ҳ����������2��������CLK2,�������߽�������Ľ����
CLKI��CLK2�ĺϳɲ�����Ϊ��ͬ��ͬ��ʱ���ź�,һ�����߿���Ȩ�ö���ijһ������,������ʱ���źŽ���ֻ�ɸ�����������
4.3.5,�������
���߷���״̬
�����������,�����Ҫ��ֹ���з�����I2C�����ϵ�ͨ�Ż,������ر�������һ�ֿ���;��,ֻҪ�ҽ��ڸ������ϵ�����һ��������ʱ����SCL�����ڵ͵�ƽ�ϼ��ɡ�
����ģʽ
ԭ���Ͻ�,ʹ������������������1���������ߵ�������ٶȡ����ٶ�����������Ӧ�õ�����֮һ����Ҳ˵��ΪʲôҪ�������ģʽ(3.4 Mbps)���ڷ���һ�θ���ģʽ����ǰ,���豸�������ڵ��ٵ�ģʽ��(�������ģʽ)�����ض��ġ�High Speed Master���źš�Ϊ�����źŵ����ں���������ٶ�,����ģʽ����ʹ�ö����I/O������������,�����ٲ��ڸ���ģʽ�¿����ε���
ʱ������
�� IIC ͨ����,���豸������ʱ���ٶȡ���Ϊʱ�������ź��������豸��ʽ�����ġ�����,�����豸û�취�������豸���ٶ�ʱ,���豸��Ҫһ�ֻ������������豸��һ�㡣���ֻ��Ƴ�Ϊʱ������,������I2C�ṹ��������,���ֻ��Ƶõ�ʵ�֡������豸��Ҫ���ʹ�����ٶȵ�ʱ��,����������ʱ����,�������豸����ȴ�״̬,ֱ�����豸�ͷ�ʱ����,ͨ�Ųż�����
4.4,ͨ�Ź���
����,���豸��һ��START�ź�,Ȼ�������豸��ʼ�������������������ݡ�����,���豸����һ��7λ�豸��ַ��һλ�Ķ�д����������֡�������д��豸�������ݺ�,�ȶԵ�ַ�Լ��Ƿ�Ŀ���豸������ȶԲ���,�豸����ȴ�״̬,�ȴ�STOP�źŵ�����;����ȶ����,�豸�ᷢ��һ��Ӧ���źš���ACK����Ӧ��
�����豸�յ�Ӧ���㿪ʼ���ͻ�������ݡ�����֡��СΪ8λ�����豸��������,���豸Ӧ��;�෴���豸��������,���豸Ӧ�𡣵����ݴ������,���豸����һ��STOP�ź�,�������豸�����ͷ�����,�����豸�ص���ʼ״̬��
4.5,Ѱַ����
ѰַԼ��
Ϊ������IIC����ϵͳ���������뱻�����ĵ�ַѡ����,����ȵؼ�����������,IIC���߲����˶��ص�ѰַԼ��,�涨�˿�ʼ�źź�ĵ�һ���ֽ�ΪѰַ�ֽ�,����Ѱַ��������,���涨���ݴ��ͷ���
��IIC����ϵͳ��,Ѱַ�ֽ�����λ��ַλ(��ռ����D7-D1λ)��һλ����λ(ΪD0λ)��ɡ�����λΪ0ʱ��ʾ������������д�뱻����,Ϊ 1ʱ��ʾ�������ӱ�������ȡ���ݡ����������Ϳ�ʼ�źź�,��������Ѱַ�ֽ�,��ʱ�����ϵ�������������Ѱַ�ֽ��е�7λ��ַ���Լ�������ַ�Ƚϡ����������ͬ,���������Ϊ��������Ѱַ,������Ӧ���ź�,���������ݶ�/дλȷ����������Ϊ���������ǽ�������
��������Ϊ������ʱ,��7λ�ӵ�ַ��IIC���ߵ�ַ�Ĵ����и���,Ϊ��������ַ�����ǵ�Ƭ�����͵���Χ������ַ��ȫ���������������ŵ�ƽ������IIC����ϵͳ��,û�������ӻ��ĵ�ַ����ͬ�ġ���������Ӧ�ô���һ�����������Ĵӵ�ַ��ͬ�ĵ�ַ��
7λI2C���߿��Թҽ�127����ͬ��ַ��I2C�豸,0�š��豸����ΪȺ����ַ.
��ַ�ķ��䷽��������:
��CPU����������,��ַ��������ʼ��ʱ����,�������������������г�ͻ
����CPU�ķ���������,�ɳ����������ڲ��̻�,���ɸı䡣
��7λΪ��ַ��,���Ϊ������:
��4λ���ڹ̶���ַ���ɸı�,�ɳ��ҹ̻���ͳһ��ַ;
����λΪ�����趨��ַ,�������ⲿ�������趨(�������������������趨);
����IIC�ӿ�ͨ��������������ַ���������ͺ��Լ�Ѱַ����ɵ�,��7λ�����ʽ����:
D7 D6 D5 D4 D3 D2 D1 D0
����������:D7-D4 ��4λ�����ġ������ɰ뵼��˾����ʱ���ѹ̶�����,Ҳ����˵��4λ���ǹ̶��ġ��û��Զ����ַ��:D3-D1��3λ���������û��Լ����õ�,ͨ����������EEPROM��Щ���������ⲿIC��3����������ϵ�ƽ������(�ó��õ�������A0,A1,A2)����Ҳ����Ѱַ�롣����ΪʲôͬһIIC������ͬһ�ͺŵ�ICֻ������8Ƭͬ����оƬ��ԭ���ˡ�
4.6,�����
������
�������������źź�,���ŷ��������ֽ�(���� R/W=1)
��Ӧ�Ĵӻ��յ���ַ�ֽں�,����һ��Ӧ���źŲ���������������
�����յ����ݺ���ӻ�����һ��Ӧ���ź�
�ӻ��յ�Ӧ���źź���������������һ������
��������ɽ������ݺ�,��ӻ�����һ������Ӧ���ź�(ACK=1)��,�ӻ��յ�ACK=1 �ķ�Ӧ���źź��ֹͣ����
�������ͷ�Ӧ���źź�,�ٷ���һ��ֹͣ�ź�,�ͷ����߽���ͨ��
ע��:�������������ݵ���������������������,�����͡���Ӧ���ź�/A��ʱ�ӻ���������Ͳ��ͷ�����(��Ӧ���źŵ���������:ǰһ�����ݽ��ճɹ�,ֹͣ�ӻ����ٴη���)��
���
�����ڼ�����Ϊ������״̬��(�� SDA��SCL �߾�Ϊ�ߵ�ƽ)ʱ,����һ�������źš�S��,��ʼһ��ͨ�ŵĿ�ʼ
�������ŷ���һ�������ֽڡ����ֽ��� 7 λ����Χ������ַ�� 1 λ��д����λ R/W���(��ʱ R/W=0Ϊд)
���Ӧ�Ĵӻ��յ������ֽں�����������Ӧ���ź� ACK(ACK=0)
�����յ��ӻ���Ӧ���źź�ʼ���͵�һ���ֽڵ�����
�ӻ��յ����ݺ�һ��Ӧ���ź� ACK
�����յ�Ӧ���źź��ٷ�����һ�������ֽ�
�������������һ�������ֽڲ��յ��ӻ��� ACK ��,ͨ����ӻ�����һ��ֹͣ�ź�P��������ͨ�Ų��ͷ����ߡ��ӻ��յ�P�źź�Ҳ�˳�������֮���ͨ��
ע��:������ͨ�����͵�ַ�����Ӧ�Ĵӻ�������ͨ�Ź�ϵ,���ҽ��������ϵ������ӻ���ȻͬʱҲ�յ��˵�ַ��,����Ϊ���������ĵ�ַ�������,�����ǰ�˳���������ͨ��;��������һ�η���ͨ��,�䷢�͵����������������ơ�������ͨ�� P �ź�֪ͨ���͵Ľ���,�ӻ��յ� P �źź��˳�����ͨ��;��������ÿһ�η��ͺ���ͨ���ӻ��� ACK �ź��˽�ӻ��Ľ���״��,���Ӧ��������ط���
��������ԭ�����,��ַ��չ�� IIC ���ߵ���Ӧ������ο�����2
�ο�����1: I2C���߽���.
�ο�����2(��ϸ):I2C����Э��/��ַ���.(���ĺܶ�����Ϊֱ�Ӹ��Ʊ����Ӷ���)
�ο�����3: ����ƪ����������(SPI��I2C��I2S��鼰����Ա�).
�ο�����4: I2S���߸���.<����̫��>
�����5: ��������:IIC��IIS��SPI��UART��JTAG��CAN��SDIO��GPIO.
5,SysTick(System Timer)
Cortex?-M23����һ�����ɵ�ϵͳ��ʱ��SysTick,�ö�ʱ���ṩ��һ����24λ��д���ݼ������������,�������Ŀ��ƻ��ơ�������������ʵʱ����ϵͳ(RTOS)��ʱ�����������
����ϵͳ��ʱ����,������SysTick��ǰֵ�Ĵ���(SYST_VAL)�е�ֵ���¼�������,������һ��ʱ���������¼���(����)��SysTick���¼���ֵ�Ĵ���(SYST_LOAD)�е�ֵ,Ȼ���ں���ʱ���ϵݼ�����������ת��Ϊ��ʱ,COUNTFLAG״̬λ�����á���ȡʱ,COUNTFLAGλ���㡣
SYST_VALֵ�ڸ�λʱδ֪�������øù���֮ǰ,����Ӧд��Ĵ����Խ������㡣���ȷ����ʱ��������ʱ����syst_loadֵ����������ֵ��ʼ����
���syst_loadΪ��,���ʱ����ʹ�ô�ֵ���¼��غ��ֵ�ǰֵΪ�㡣�û��ƿ����ڶ����ڶ�ʱ��ʹ��λ���øù���
�йظ�����ϸ��Ϣ,����ġ�ARM?Cortex?-M23�����ο��ֲᡷ�͡�ARM?V8-M�ܹ��ο��ֲᡷ��
5.1,ϵͳ��ʱ�����ƼĴ���ӳ��
R: read only, W: w rite only, R/W: both read and write
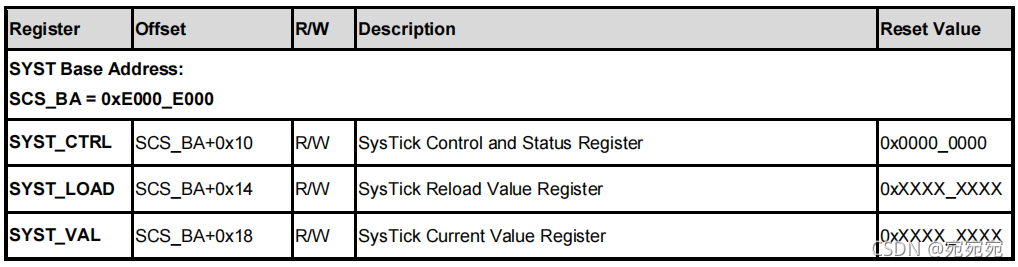
5.2,ϵͳ��ʱ�����ƼĴ�������
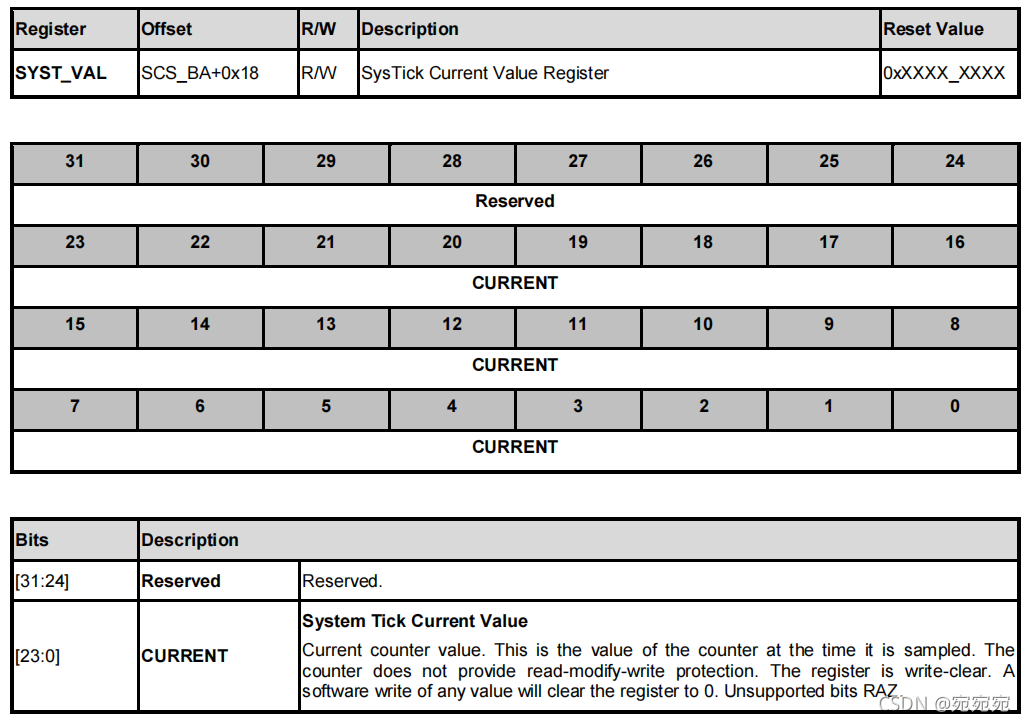
5.2.1,SysTick���ƺ�״̬�Ĵ���(SYST_CTRL)
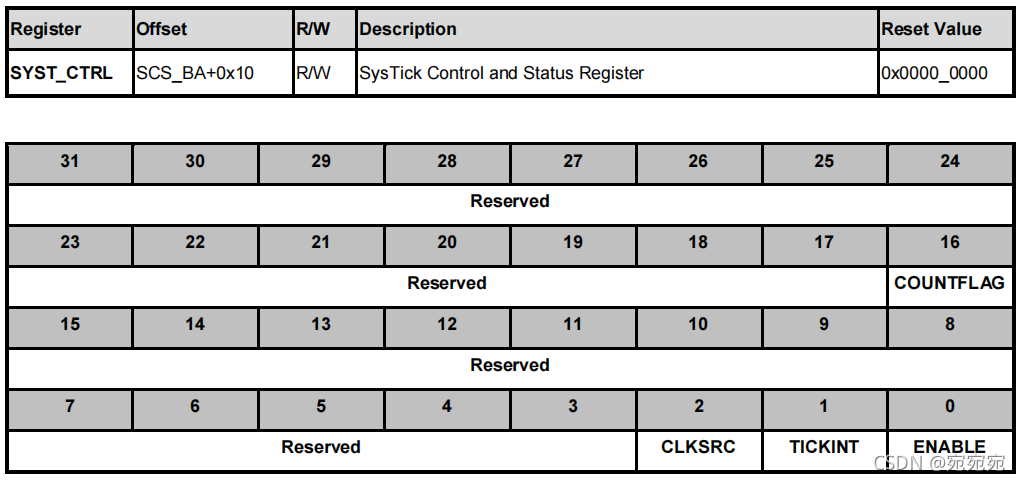
����,COUNTFLAG ����ض���Ϊ:
������ϴζ�ȡ�üĴ���������ʱ������Ϊ0,��ϵͳ��ʱ��������־����1��COUNTFLAGͨ����1��0�ļ���ת�������á�COUNTFLAG�ڶ�ȡ��д�뵱ǰֵ�Ĵ���ʱ�����
ϵͳ�δ�ʱ��Դѡ��CLKSRC
0=ʱ��ԴΪ(��ѡ)�ⲿ�ο�ʱ�ӡ�
1=SysTickʹ�õĺ���ʱ�ӡ�
ϵͳ��ʱ�ж����á���TICKINT
0=����ʱ��0���ᵼ�¹���SysTick�쳣����������ʹ��COUNTFLAG��ȷ���Ƿ����˼���Ϊ��������
1=����ʱ��0�����¹���SysTick�쳣��ͨ����������д��Ĵ��������SysTick��ǰֵ�Ĵ������ᵼ��SysTick����
ϵͳ���ļ��������á���ENABLE
0=���������á�
1=���������Զ�巽ʽ���С�
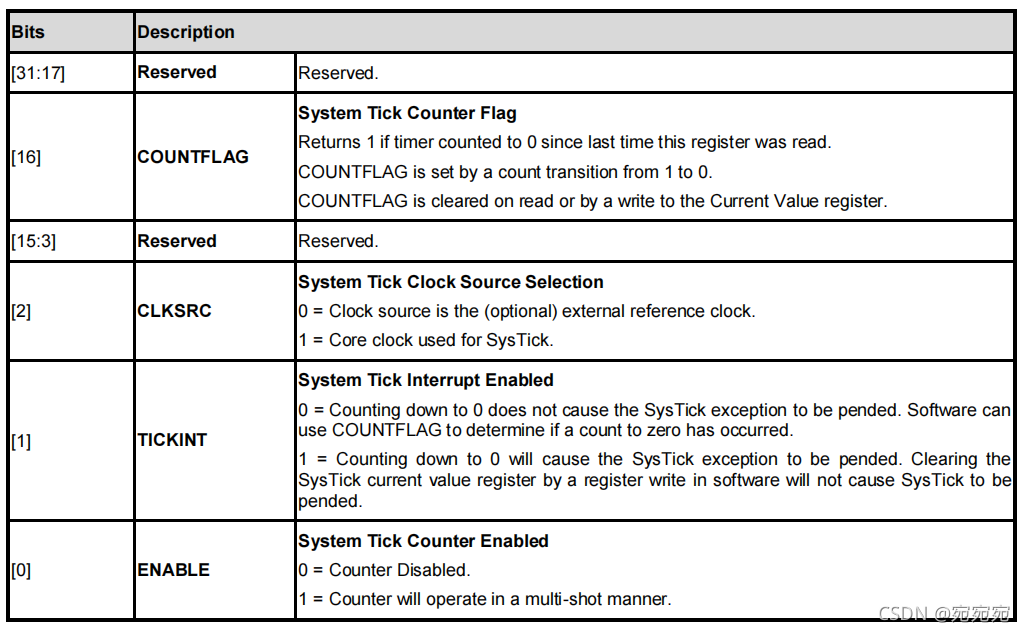
5.2.2,SysTick����ֵ�Ĵ���(SYST_LOAD)
ϵͳ��ʱ����ֵ����RELOAD
�������ﵽ0ʱҪ���ص���ǰֵ�Ĵ�����ֵ��
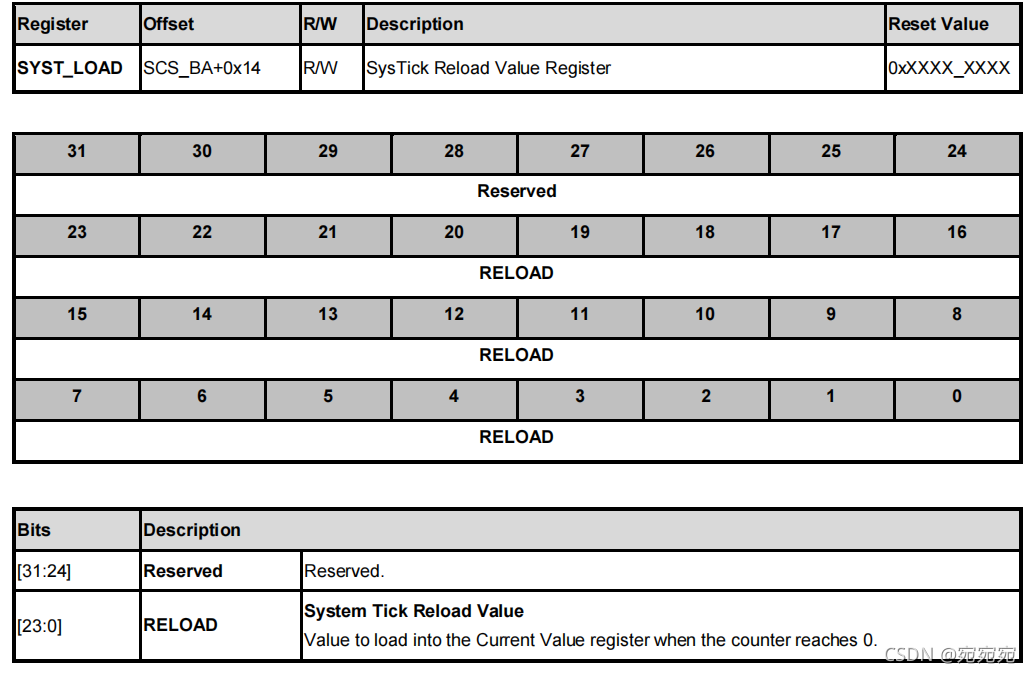
5.2.3,SysTick��ǰֵ�Ĵ���(SYST_VAL)
ϵͳ�δ�ֵ����CURRENT
��ǰ������ֵ�����Dz���ʱ��������ֵ�����������ṩ��-��-д�������üĴ�����д����ġ�����д���κ�ֵ���Ὣ�Ĵ������㡣��֧�� bits RAZ��
RAZ : Read-As-Zero ���κ�ʵ����,λ�����Ϊ0,����һ��λ�������ֵ����0��
�ο�����: ����һЩ����Ľ���.
5.3,һ���IJο�����
__STATIC_INLINE void CLK_SysTickLongDelay(uint32_t us)
{
uint32_t u32Delay;
/* It should <= 65536us for each delay loop */
u32Delay = 65536UL;
do
{
if(us > u32Delay)
{
us -= u32Delay;
}
else
{
u32Delay = us;
us = 0UL;
}
SysTick->LOAD = u32Delay * CyclesPerUs; //CyclesPerUs����Ϊ:Cycles per micro second,��ֵ��Ϊ48,������������֪,��ֵΪ��ǰҪ���ص�SysTick�Ĵ����е�ֵ
SysTick->VAL = (0x0UL); //SYST_VALֵ�ڸ�λʱδ֪�������øù���֮ǰ,����Ӧд��Ĵ����Խ������㡣���ȷ����ʱ��������ʱ����syst_loadֵ����������ֵ��ʼ����
SysTick->CTRL = SysTick_CTRL_CLKSOURCE_Msk | SysTick_CTRL_ENABLE_Msk; //��ʼ��,����CLCSRCλ��ENABLEλ��ֵ��Ϊ1.��SysTick����core clock,��ʹ��SysTick�Ĵ���
/* Waiting for down-count to zero */
while((SysTick->CTRL & SysTick_CTRL_COUNTFLAG_Msk) == 0UL);//����ѭ��ʱ,SysTick->CTRL & SysTick_CTRL_COUNTFLAG_Msk=0(000101 & (1<<16)),ѭ����������,����whileѭ����֮��ֱ������������,SysTick->CTRL�е�COUNTFLAGλ��0��Ϊ1,ѭ���������ٳ���,����ѭ����
/* Disable SysTick counter */
SysTick->CTRL = 0UL;//���øò���,��Ҫ������COUNTFLAGλ
}
while(us > 0UL);
}
������Ϊһ������ʱ����,������SysTick��ʱ��������ʱ������
6,UART
UART Interface Controller (UART) :UART�ӿڿ�����
6.1,����
��оƬ�ṩ��·ͨ���첽�շ��� (Universal Asynchronous Receiver/Transmitters,UART)��UART������ִ�г���UART,��֧���������ƹ��ܡ�UART�������Դ�������յ�����ִ�д���ת��,�Դ�CPU���͵�����ִ�в���ת����ÿ��UART������ͨ��֧��10�����͵��жϡ�UART��������֧��IrDA SIR��LIN��RS-485����ģʽ�Լ��Զ������ʲ������ܡ�
6.2,�ص�
- ȫ˫���첽ͨ��;
- ��������Ч�غɵ�16/16�ֽ������Ƚ��ȳ�����;
- ֧��Ӳ���Զ���������;
- �ɱ�̽�����������������ƽ;
- ֧��ÿ��ͨ���Ŀɱ�̲����ʷ�����;
- ֧��nCTS���������ݡ����������Ƚ��ȳ��ﵽ��ֵ��RS-485��ַƥ��(AADģʽ)���ѹ���;
- ֧��8λ���������峬ʱ����;
- ͨ������DL�ɱ�̴�����һվ����һ��ʼλ֮��������ӳ�ʱ��;
- ֧���Զ������ʲ����Ͳ����ʲ�������,
��LXTѡ��֧��9600 bps��UART_CLK�� - ֧���жϴ���֡������żУ�����ͽ���/���ͻ������������;
- ��ȫ�ɱ�̵Ĵ��нӿ����ԡ�
���ɱ������λ��,5λ��6λ��7λ��8λ�ַ�;
���ɱ����żУ��λ��ż���桢����żУ��λ��������żУ��λ���ɺͼ��;
���ɱ��ֹͣλ,1��1.5��2��ֹͣλ���� - ֧��IrDA SIR����ģʽ
��֧������ģʽ��3/16λ����ʱ��; - ֧��LIN����ģʽ(��UART0/UART1����LIN����)
��֧��LIN��/��ģʽ;
��֧�ַ�����ɱ���ж����ɹ���;
��֧�ֽ��ջ��жϼ���; - ֧��RS-485����ģʽ��
��֧��RS-4859λģʽ;
��֧��Ӳ��������,�ɶ�NRT���Ž��б���Կ���RS-485���䷽��; - ֧��PDMA���书��
6.3,����ͼ
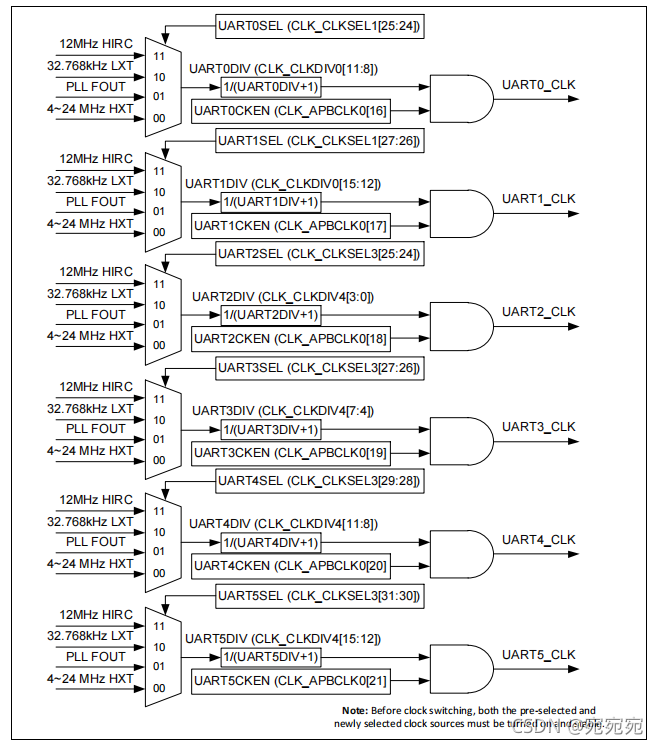
UARTʱ�ӿ��ƺͿ�ͼ�ֱ�����ͼ6.3-1��ͼ6.3-2��ʾ:
ע��:UARTx_CLK��Ƶ�ʲ�Ӧ����HCLK��30����
ͼ6.3-1 UARTʱ�ӿ���ͼ
ͼ6.3-2 UART��ͼ
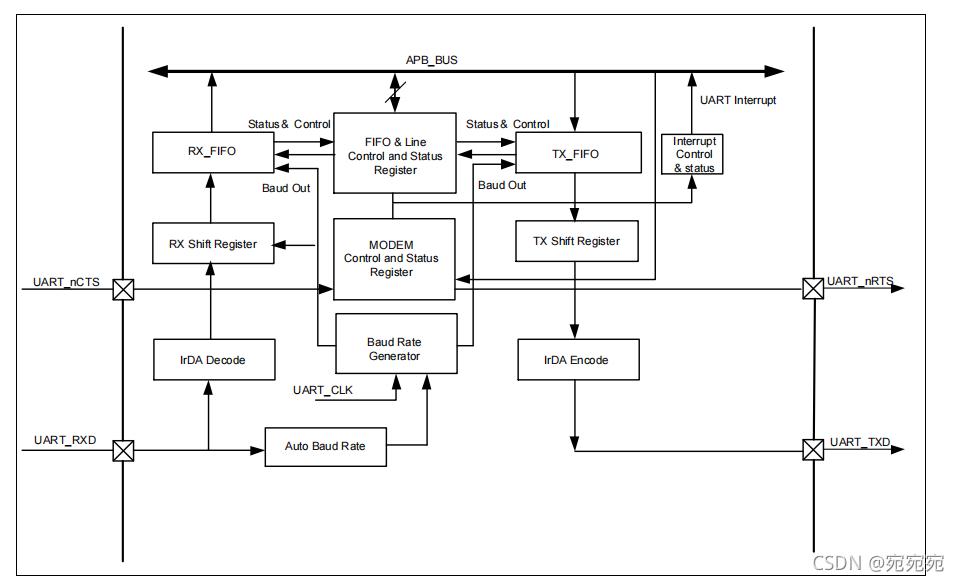
ÿ�������ϸ��������:
TX_FIFO
����������16�ֽ�FIFO���л���,�Լ����ṩ��CPU���ж�������
RX_FIFO
������ʹ��16�ֽ�FIFO(�����������λBIF(UART_FIFO STS[6])��FEF(UART_FIFO STS[5])��PEF(UART_FIFO STS[4])���л���,�Լ�����CPU�ṩ���ж�������
TX Shift Register
��ģ�鸺�����Ƴ��������ݡ�
RX Shift Register
��ģ�鸺��������������ݡ�
Modem Control and Status Register
���ƽ�������ƺ�״̬�Ĵ���,�˼Ĵ������Ƶ��ƽ���������ݼ�(��ģ����ƽ��������Χ�豸)�Ľӿڡ�
Baud Rate Generator
�����ʷ�����,���ⲿʱ�ӳ��Գ���,�õ�����IJ�����ʱ�ӡ�����IJ����ʷ��̡�
IrDA Encode
IrDA����,�˿���IrDA������ƿ�
IrDA Decode
IrDA����,�˿���IrDA������ƿ�
FIFO & Line Control and Status Register
FIFO&��·���ƺ�״̬�Ĵ���,���ֶ��ǼĴ�����,�������ڷ������ͽ�������FIFO���ƼĴ���(UART_FIFO)��FIFO״̬�Ĵ���(UART_FIFOSTS)����·���ƼĴ���(UART_LINE)����ʱ�Ĵ���(UART_TOUT)��ʶ��ʱ�жϵ�����
Auto-Baud Rate Measurement
�Զ������ʲ���,��ģ�鸺���Զ������ʲ�����
Interrupt Control and Status Register
�жϿ��ƺ�״̬�Ĵ���,��ʮ�����͵��ж�,�������ݿ����ж�(Receive Data Available Interrupt,RDAINT)�����ͱ��ּĴ������ж�(Transmit Holding Register Empty Interrupt ,THERINT)�����������ж�(Transmitter Empty Interrupt ,TXENDINT)��������״̬�ж�(��żУ�������֡������ж�)(Receive Line Status Interrupt ,RLSINT)�����ƽ����״̬�ж�(MODEM Status Interrupt ,MODEMINT)����������������ʱ�ж�(Receiver Buffer Time-out Interrupt ,RXTOINT)�������������ж�(Buffer Error Interrupt ,BUFERRINT)��LIN�����ж�(Bus Interrupt,LINT),�����ж�(Wake-up Interrupt ,WKINT) ���Զ��������ж�(Auto-Baud Rate Interrupt ,ABRINT)���ж����üĴ���(UART_INTEN)���û������Ӧ�жϺ��ж�״̬�Ĵ���(UART_INTSTS),��ʶ����Ӧ�жϵķ�����
6.4,��������
UART0�Ļ�����������:
- ʱ��Դ����
�Cѡ��UART0SEL(CLK_CLKSEL1[25:24])�ϵ�UART0����ʱ��Դ��
�Cѡ��UART0DIV(CLK_CLKDIV0[11:8])��UART0����ʱ�ӵ�ʱ�ӷ�Ƶ����š�
�C��UART0CKEN(CLK_APBCLK0[16])������UART0����ʱ�ӡ� - ��UART0RST(SYS_IPR ST1[16])������UART0��������
- ��������
UART1�Ļ�����������:
- ʱ��Դ����
�Cѡ��UART1SEL(CLK_CLKSEL1[27:26])�ϵ�UART1����ʱ��Դ��
�Cѡ��UART1DIV(CLK_CLKD IV0[15:12])��UART1����ʱ�ӵ�ʱ�ӷ�Ƶ����š�
�C��UART1CKEN(CLK_APBCLK0[17])������UART1����ʱ�ӡ� - ��λUART1RST(SYSIPRST1[17])�е�UART1��������
- ��������
UART2 ~ UART5��,��������ֲ�
6.5,����˵��
UART������֧�����ֹ���ģʽ,����UART��IrDA��LIN��RS-485ģʽ���û�����ͨ������UART_FUNCSEL�Ĵ�����ѡ���ܡ����²��ֽ����������ֹ���ģʽ��
6.5.1,UART�����������ʷ�����
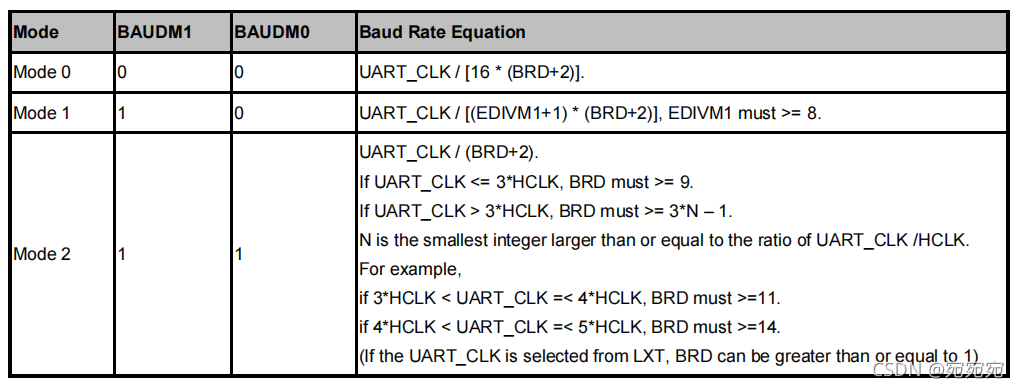
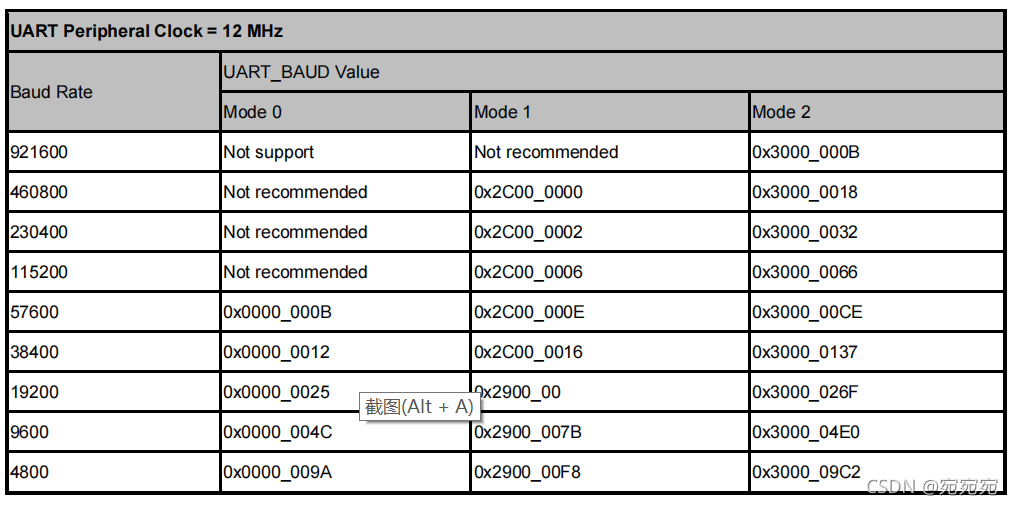
UART����������һ���ɱ�̲����ʷ�����,�ܹ���ʱ��������Գ���,�Բ����������ͽ���������Ĵ���ʱ�ӡ���6.1�г��˸��������µ�UART�����ʹ�ʽ����6.2�ͱ�6.3�г���UART�����ʲ����ͼĴ�������ʾ������IrDA����ģʽ��,�����ʷ�������������Ϊģʽ0������ϸ�ļĴ���˵����UART_BAUD�Ĵ���������������ģʽ��ģʽ0��UART_Baud[29:28]����Ϊ00��ģʽ1��UART_Baud[29:28]����Ϊ10��ģʽ2��UART_Baud[29:28]����Ϊ11��
��6.1 UART�����������ʷ���ʽ��
��6.2 UART�����������ʲ�������ʾ����
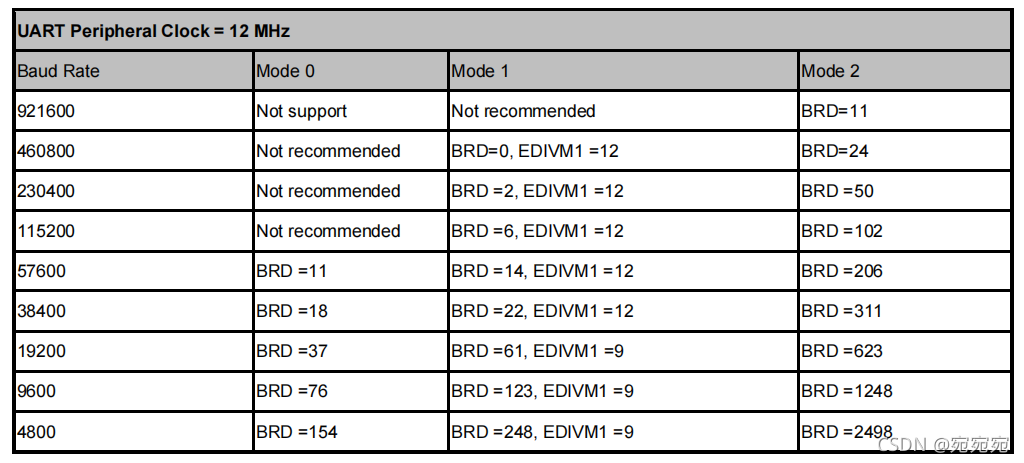
ע:UART����ʱ��=12 MHz
��6.3 UART�����������ʼĴ�������ʾ����
6.5.2,UART�����������ʲ���
UART������֧�ֲ����ʲ������ܡ��������Ż�ÿһλ�ľ��ȡ���������ΪUARTģ��ʱ�ӵ�һ��,��Ϊÿ��λ����BRCOMDECλ(UART_BRCOMP[31])�������������������BRCOMPDEC(UART_BRCOMP[31])=0,��ÿһλΪ������,����λ�н��ٸ���һ��ģ��ʱ�ӡ����BRCOMPDEC(UART_BRCOMP[31])=1,��ÿһλΪ������,�ڲ���λ�м���һ��ģ��ʱ�ӡ�
BRCOMP [8:0] (UART_BRCOMP[8:0])��9λλ��,�����û������Զ����Ƿ����λ��BRCOMP[7:0]���ڶ���UART_DAT[7:0]�IJ���,BRCOMP[8]���ڶ�����żУ��λ��
ʾ��:
1, UART������ʱ��=32.768K,������Ϊ9600
UART����ʱ��Ϊ32.768K->3.413(32768 / 9600)1 ����ʱ�� / λ
������ط�Ƶ������Ϊ1(3������ʱ�� / λ),��ÿ��λ�����Ϊ-0.413����ʱ��,��BRCOMPDEC=0��
��6.4 �����ʲ���ʾ����1
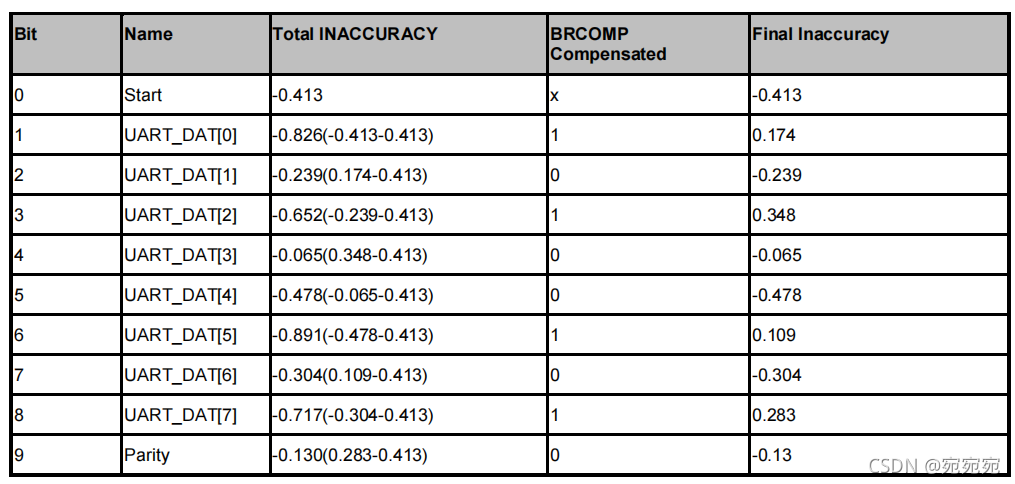
���BRCOMP(UART_BRCOMP[8:0])��������Ϊ9��b010100101=0xa5��
2, UART������ʱ��=32.768K,������Ϊ4800
������Ϊ4800ʱ,UART����ʱ��Ϊ32.768K->6.827����ʱ��/λ
��������ʷ�Ƶ������Ϊ5(7������ʱ��/λ),��ÿλ�����Ϊ0.173����ʱ��,BRCOMPDEC=1��
��6.5 �����ʲ���ʾ����2
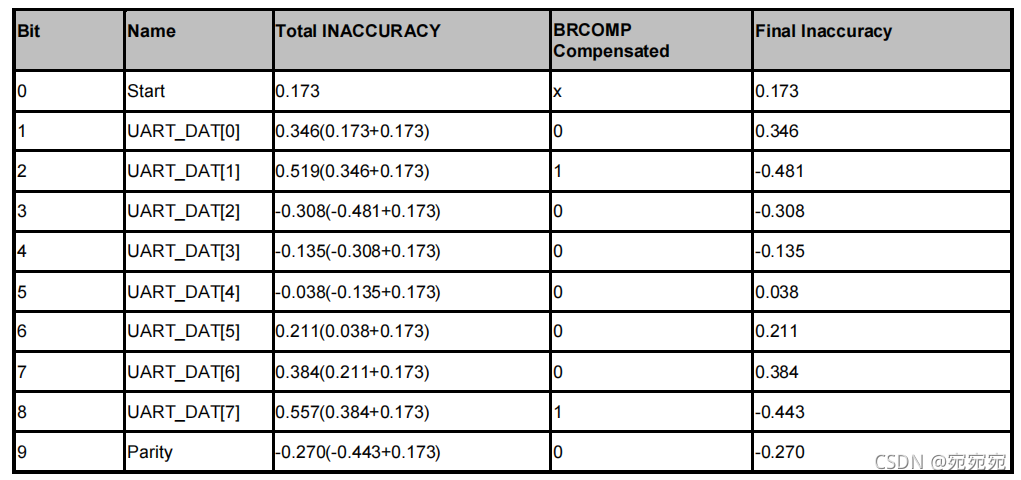
���BRCOMP(UART_BRCOMP[8:0])��������Ϊ9��b010000010=0x82��
6.5.3,UART�������Զ������ʹ���ģʽ
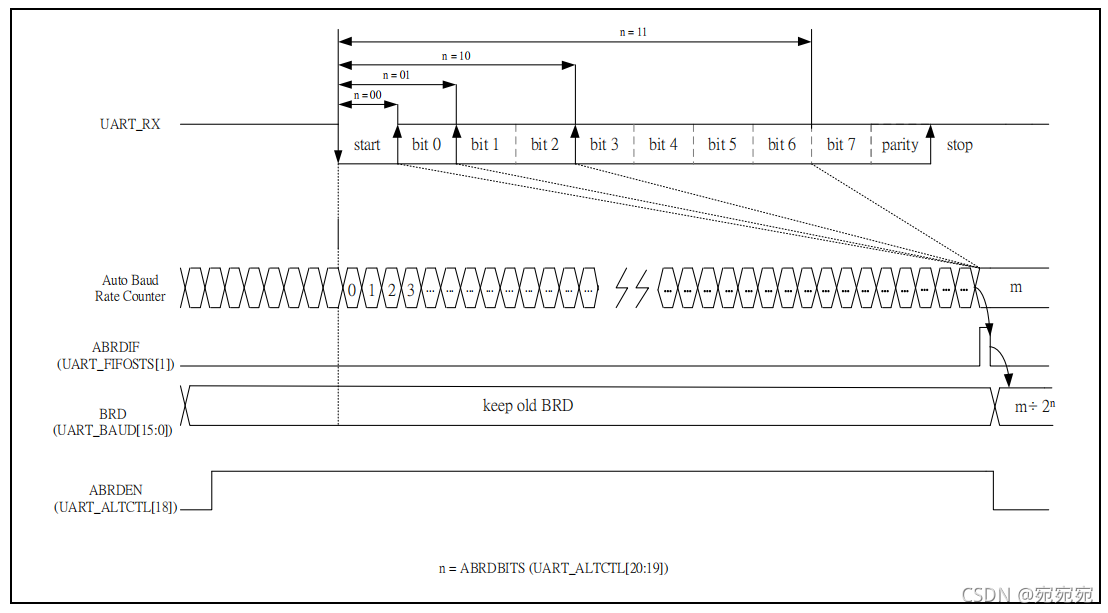
�Զ������ʹ��ܿ����Զ�������UART RX���Ž������ݵIJ����ʡ��Զ������ʲ�����ɺ�,���������ʼ��ص�BRD(UART_BAUD[15:0])��BAUDM1(UART_BAUD[29])��BAUDM0(UART_BAUD[28])���Զ�����Ϊ1������ʼλ����һ������ʱ���UART RX�������Զ������ʹ��ܼ��֡�е�2ABRDBITSλʱ�����á�
2ABRDBITSλ����ʼλ����һ�������ص�ʱ��ͨ������ABRDBITS(UART_ALTCTL[20:19])���㡣����ABRDEN(UART_ALTCTL[18])��ʹ���Զ������ʹ��ܡ��ڿ�ʼ��,UART RX������1��һ�����½���,�ͽ�����ʼλ���Զ������ʼ�������λ����ʼ������������һ��������ʱ,�Զ������ʼ�������ֹͣ��Ȼ��,�Զ������ʼ�����ֵ����2ABRDBITS(UART_ALTCTL[20:19])�Զ����ص�BRD(UART_BAUD[15:0])��ABRDEN(UART_ALTCTL[18])��������Զ���������ͼ6.5-1��ʾ���Զ������ʲ�����ɺ�,����ABRDIF(UART_FIFOSTS[1])�����Զ������ʼ��������ʱ,����ABRDTOIF(UART_FIFOSTS[2])��ABRDIF(UART_FIFOSTS[1])��ABRDTOIF(UART_FIFO STS[2])�����Զ������ʱ�־ABRIF(UART_ALTCTL[17])���ɡ����ABRIEN(UART_INTEN[18])ʹ��,��ABRIF(UART_ALTCTL[17])�ᵼ���Զ��������ж�ABRINT(UART_INTST[31])���ɡ�
ͼ6.5-1 �Զ������ʲ���
�������ʾ��:
1.���ABRDBITS(UART_ALTCTL[20:19])��2ABRDBITSλʱ��ȷ��UART RX���ݴ�START��ʼ�ĵ�һ��������ʱ�䡣
2.����ABRIEN(UART_INTEN[18])ʹ���Զ������ʹ����жϡ�
3.����ABRDEN(UART_ALTCTL[18])ʹ���Զ������ʹ��ܡ�
4.����ABRDIF(UART_FIFOSTS[1]),����Զ������ʲ�����
5.����UART���ͺͽ��ն�����
6.����Զ������ʼ��������,������ABRDTOIF(UART_FIFOSTS[2])��
7.ת������3��
6.5.4,UART�����������ӳ�ʱ��ֵ
UART��������DLY(UART_TOUT[15:8])���б��,�Կ��ƴ��������һ��ֹͣλ����һ����ʼλ֮��Ĵ����ӳ�ʱ�䡣�����Ԫ�Dz��صġ�������ͼ6.5-2��ʾ��
ͼ6.5-2 �����ӳ�ʱ�����

6.5.5,UART������FIFO���ƺ�״̬
UART����������16�ֽڷ�����FIFO(TX_FIFO)��16�ֽڽ�����FIFO(RX_FIFO),�ɼ����ṩ��CPU���ж�������CPU�����ڲ����ڼ���ʱ��ȡUART��״̬�������״̬��Ϣ����UART����ִ�еĴ�����������,�Լ����������������żУ�顢֡���жϴ���ʱ������3����������(��żУ�����֡�����ж��ж�)��UART��IrDA��LIN��RS485ģʽ֧��FIFO���ƺ�״̬���ܡ�
6.5.6,UART���������ѹ���
UART������֧�ֻ���ϵͳ���ܡ����ѹ��ܰ���nCTS���š��������ݻ��ѡ���������FIFO�ﵽ��ֵ���ѡ�RS-485��ַƥ��(AADģʽ)���Ѻͽ�������FIFO��ֵ��ʱ���ѹ��ܡ�CTSWKF(UART_WKSTS[0])��DATWKF(UART_WKSTS[1])��RFRTWKF(UART_WKSTS[2])��RS485WKF(UART_WKSTS[3])��TOUTWKF(UART_WKSTS[4])���������жϱ�־WKIF(UART_INTSTS[6�����WKIEN(UART_INTEN[6])ʹ��,�����жϱ�־WKIF(UART_INTSTS[6])���������ж�WKINT(UART_INTSTS[14])��
NCTS���Ż���:��ϵͳ���ڵ���ģʽ��������WKCTSEN(UART_WKCTL[0])ʱ,nCTS���ŵ��л����Ի���ϵͳ�����ʹ��WKCTSEN(UART_WKCTL[0]),��nCTS���ŵ��л������nCTS���ѱ�־CTSWKF(UART_WKSTS[0])��NCTS������ͼ6.5-3-5��ͼ6.5-4��ʾ��
ͼ6.5-3 NCTS���Ѱ���1(nCTS�ӵ͵��ߵ�ת��)
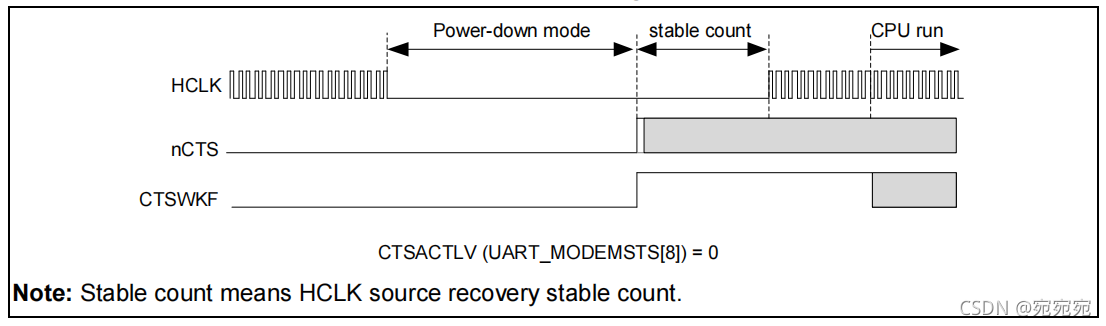
ע:�ȶ�������ζ��HCLKԴ�ָ��ȶ�������
ͼ6.5-4 NCTS���Ѱ���2(nCTS�Ӹߵ��͵�ת��)
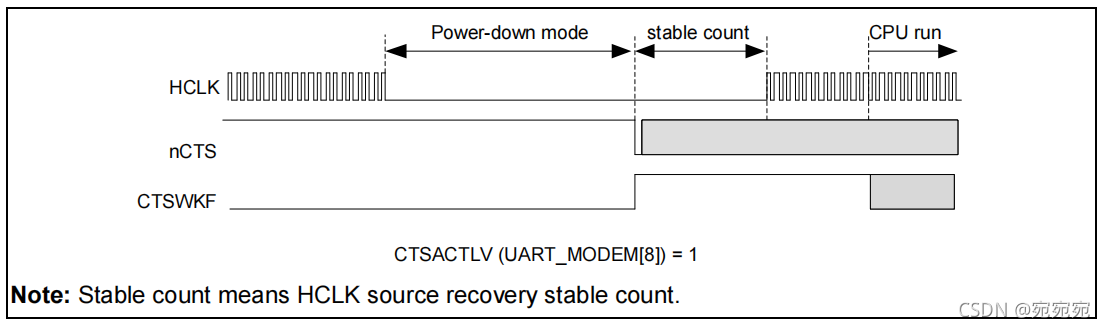
ע:�ȶ�������ζ��HCLKԴ�ָ��ȶ�������
�������ݻ���
��ϵͳ���ڵ���ģʽ��������WKDATEN(UART_WKCTL[1])ʱ,��������(UART_RXD)���ŵ��л����Ի���ϵͳ��Ϊ����ϵͳ���Ѻ������������,Ӧ����STCOMP(UART_DWKCOMP[15:0])��STCOMP����Щλ�ֶα�ʾ��ϵͳ�ӵ���ģʽ����ʱ,UART_CLKѡ���˶��ٸ�ʱ������,UART���������Ի�õ�һλ(��ʼλ)��
���������ݻ���ϵͳʱ,�������ݽ������ղ��洢��FIFO�С����WKDATEN(UART_WKCTL[1])ʹ��,����������(UART_RXD)���ŵ��л�������������ݻ��ѱ�־DATWKF(UART_WKSTS[1])����������ݻ�����ͼ6.5-5��ʾ��
ע1:UART������ʱ��ԴӦѡ��ΪHIRC,��ʼλ����ʱ��ԼΪ8.602us����ʾSTCOMP(UART_DWKCOMP[15:0])��ֵ��������Ϊ0x68��
ע2:BRD(UART_BAUD[15:0])��ֵӦ����STCOMP(UART_DWKCOMP[15:0])��
ͼ6.5-5 UART���ݻ���
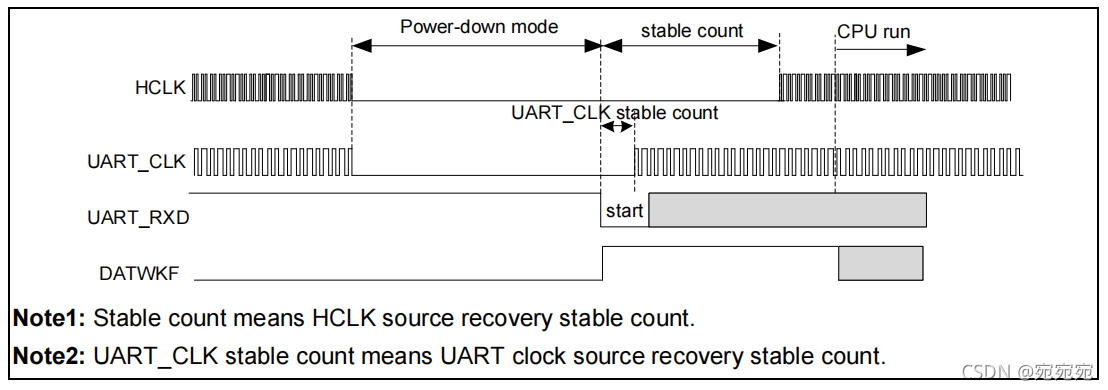
ע1:�ȶ�������ʾHCLKԴ�ָ��ȶ�������
ע2:UART_CLK�ȶ�������ʾUARTʱ��Դ�ָ��ȶ�������
��������FIFO�ﵽ��ֵ����
ͨ������WKRFRTEN(UART_WKCTL[2])���ý�������FIFO��ֵ�ﵽ���ѹ��ܡ��ڵ���ģʽ��,��RX FIFO�н��յ����������ﵽ��ֵRFITL(UART_FIFO[7:4])ʱ,���Ի���ϵͳ�����WKRFRTEN(UART_WKCTL[2])ʹ��,��RX FIFO�еĽ������������ﵽ��ֵRFITL(UART_FIFO[7:4]),�Ӷ����ɽ�������FIFO�ﵽ��ֵ���ѱ�־RFRTWKF(UART_WKSTS[2])����������FIFO�ﵽ��ֵ������ͼ6.5-6��ʾ��
ע:�ڵ���ģʽ��,Ӧѡ��UART������ʱ��Դ��ΪLXT�Խ�������
ͼ6.5-5 UART��������FIFO�ﵽ��ֵ����
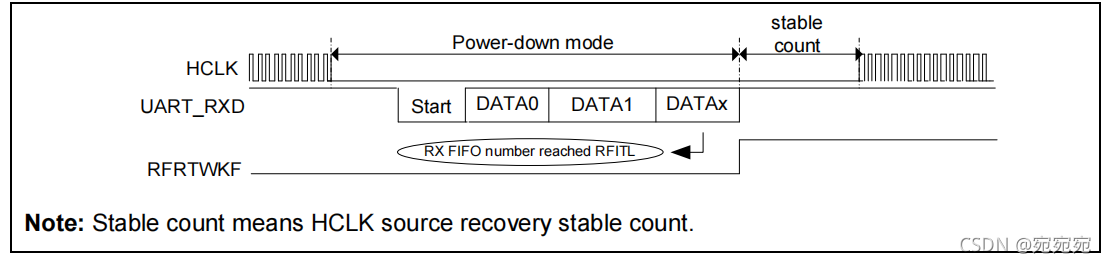
ע:�ȶ�������ζ��HCLKԴ�ָ��ȶ�����
RS-485��ַƥ��(AADģʽ)����,��������FIFO��ֵ��ʱ������,��������ֲ�
6.5.7,UART�������жϺ�״̬
ÿ��UART������֧��10�����͵��ж�,����:
- �������ݿ����ж�;
- ���䱣�ּĴ������ж�;
- ���������ж�;
- ������״̬�ж�;
�C�ж��жϱ�־;
�C��֡�����־;
�C��żУ������־;
�CRS-485��ַ�ֽڼ���־(ADDRDETF) - ���ƽ����״̬�ж�(MODEMINT);
�C���NCTS״̬���ı�־(CTSDETF); - ��������������ʱ�ж�;
- �����������ж�;
�CTX��������жϱ�־;
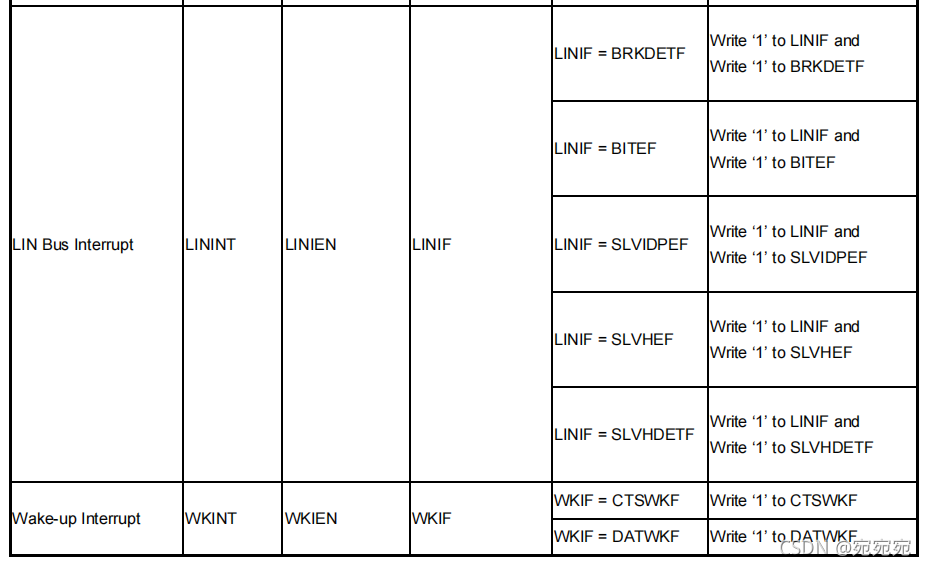
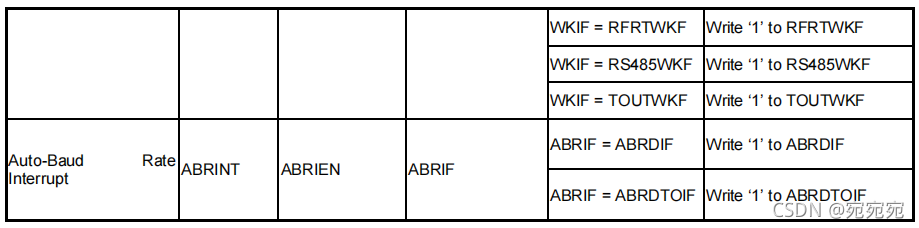
�CRX��������жϱ�־; - LIN�����ж�(LININT);
�CLIN�жϼ���־ (BRKDETF);
�Cλ������״̬��־(BITEF);
�CLIN��ID��żУ������־(SLVIDPEF);
�CLIN������ͷ�����־(SLVHEF);
�CLIN������ͷ����־(SLVHDETF) - �����ж�(WKINT);
�C nCTS���ѱ�־(CTSWKF);
�C�������ݻ��ѱ�־(DATWKF);
�C��������FIFO�ﵽ��ֵ���ѱ�־(RFRTWKF);
�CRS-485��ַƥ��(AADģʽ)���ѱ�־(RS485WKF);
�C��������FIFO��ֵ��ʱ���ѱ�־(TOUTWKF) - �Զ��������ж�(ABRINT);
�C�Զ������ʼ���жϱ�־(ABRDIF)
�C�Զ������ʼ�ⳬʱ�жϱ�־(ABRDTOIF)
��6.6�������ж�Դ�ͱ�־�������жϱ�־�������ж�ʹ��λʱ,�������жϡ��û��������ж����ɺ�����жϱ�־��
��6.6 UART�������ж�Դ�ͱ�־�б�
��ͷ:�ж�Դ �ж�ָʾ�� �ж�����λ �жϱ�־ ��־ ��ʼ�� ��־�����
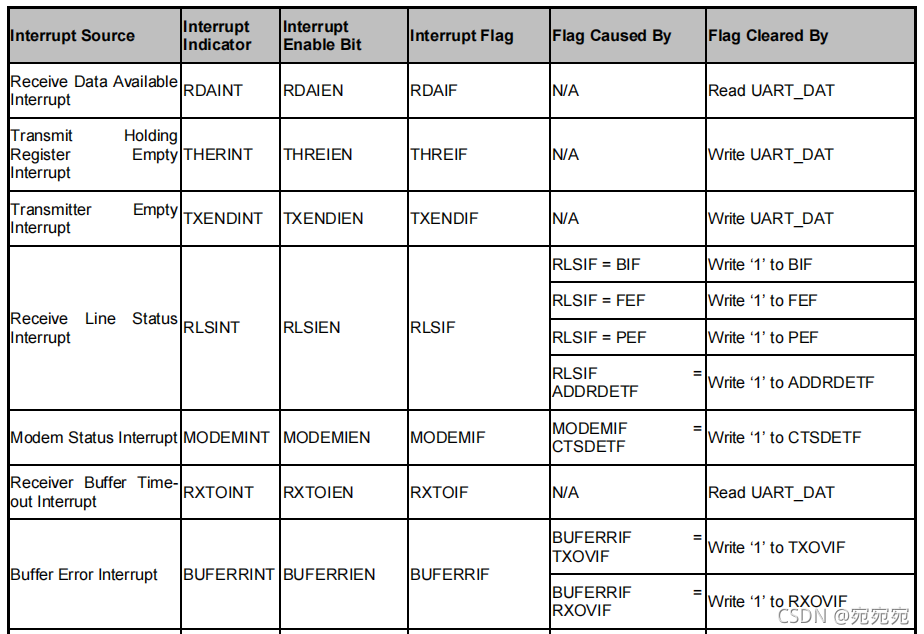
N/A:Not Applicable
6.5.8,UART����ģʽ
UART�������ṩUART����(��FUNCSEL(UART_FUNCSEL[1:0])����Ϊ��00��������UART����ģʽ)��UART�����ʸߴ�1Mbps��
UART�ṩȫ˫�����첽ͨ�š��������ͽ���������������Ч�غɵ�16�ֽ�FIFO���û����ԶԽ��������崥����ƽ�ͽ��������峬ʱ�����б�̡�ͨ������DLY(UART_TOUT[15:8])�Ĵ���,���Զ���һ��ֹͣλ����һ����ʼλ֮��ķ��������ӳ�ʱ����б�̡�UART֧��Ӳ���Զ���������,���ṩ�ɱ��NRT�������ƴ�������RX FIFO�е������ֽ������ڻ����RTSTRGLV(UART_FIFO[19:16]),��ȡ����NRT����λ��
UART��·���ƹ���
ͨ������UART_LINE�Ĵ���,UART������֧����ȫ�ɱ�̵Ĵ��нӿ����ԡ��û����Զ�UART_LINE�Ĵ������ֳ���ֹͣλ����żУ��λ���ý��б�̡���6.7�ͱ�6.18�г���UART�֡�ֹͣλ���Ⱥ���żУ��λ���á�
��6.7 UART�߿����ֺ�ֹͣ��������
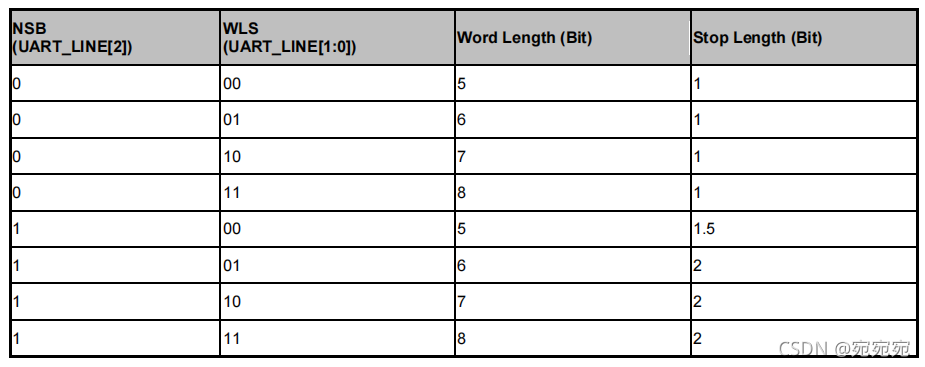
��6.8 ��żУ��λ���õ�UART��·����
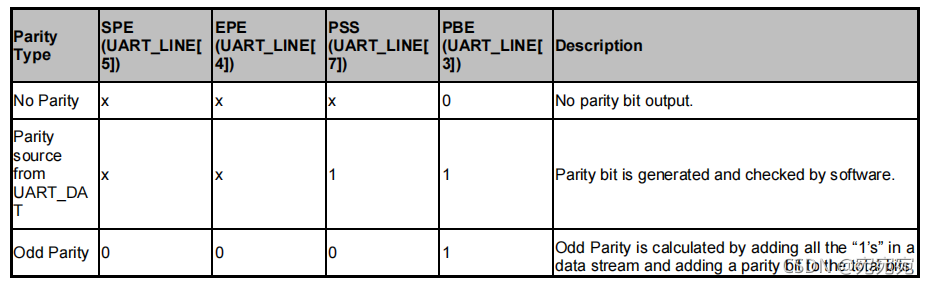
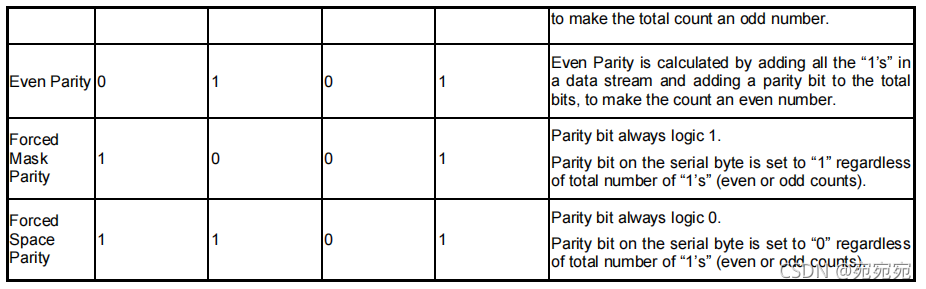
ע:
- ������żУ����ͨ�����������е����С�1�����,������żУ��λ���ӵ��ܱ������������,��ʹ�ܼ���Ϊ����;
- żУ��ͨ�����������е����С�1����Ӳ�����żУ��λ���ӵ��ܱ���������ż����żУ��,��ʹ����Ϊż��;
- ǿ��������żУ��:��żУ��λ������1�����ۡ�1���������Ƕ���(ż��������),�����ֽ��ϵ���żУ��λ������Ϊ��1����
- ǿ�ƿռ���żУ��:��żУ��λʼ����0�����ۡ�1���������Ƕ���(ż��������),�����ֽ��ϵ���żУ��λ������Ϊ��0����
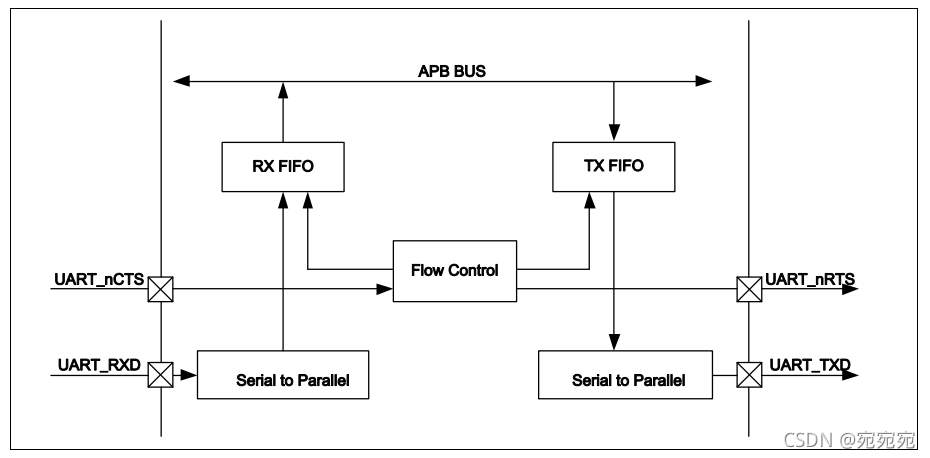
UART�Զ��������ƹ���
UART֧���Զ��������ƹ���,�ù���ʹ�������ź�nCTS(�������)��nRTS(������)������UART���ⲿ�豸(������ƽ����)֮������������䡣���Զ���ʹ��ʱ,��UART��nRTS��λ���ⲿ�豸֮ǰ,������UART�������ݡ���RX FIFO�д洢���ֽ�������RTSTRGLV(UART_FIFO[19:16])��ֵʱ,nRTS��������ԡ���UART�������ⲿ�豸��nCTS������ʱ,UART�������ݡ����δ����Ч�Ķ���nCTS,��UART�����������ݡ��Զ��������ƿ�ͼ��ͼ6.5-6��ʾ��
ͼ6.5-6 �Զ��������ƿ�ͼ
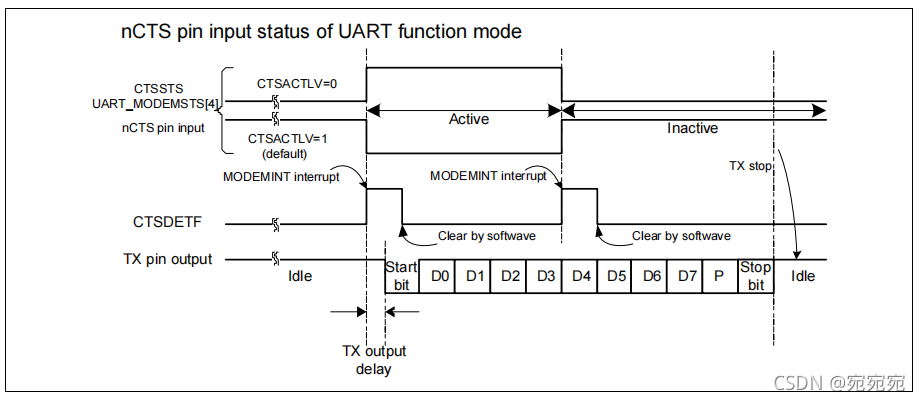
ͼ6.5-7չʾ��UART����ģʽ��nCTS�Զ��������ơ��û���������ATOCTSEN(UART_INTEN[13])��������nCTS�Զ��������ƹ��ܡ�CTSACTLV(UART_MODEMSTS[8])��������nCTS�������뼤��״̬����nCTS�������뷢���κ�״̬�仯ʱ,����CTSDETF(UART_MODEMSTS[0]),Ȼ���Tx FIFO�Զ�����Tx���ݡ�
ͼ6.5-7 UART nCTS�Զ���������������
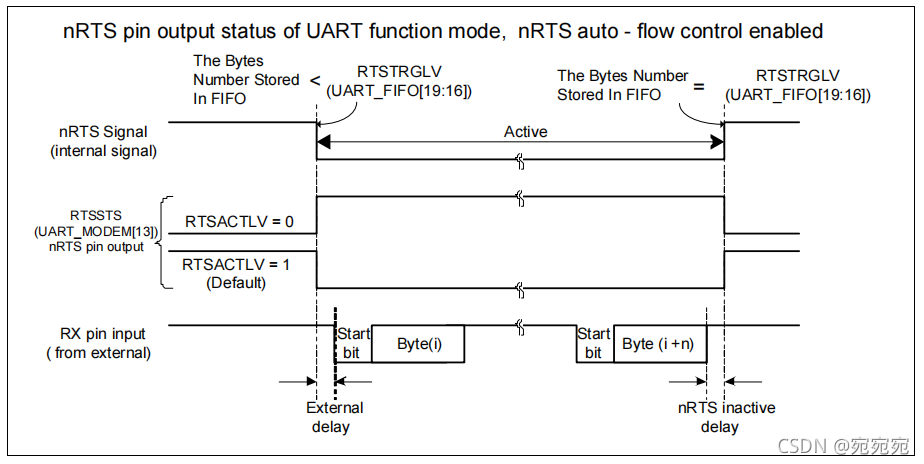
��ͼ6.5-8��ʾ,��UART NRTS�Զ���������ģʽ��(ATORTSEN(UART_INTEN[12])=1),NRTS�ڲ��ź��ɾ���RTSTRGLV(UART_FIFO[19:16])������ƽ��UARTFIFO���������ơ�
����RTSACTLV(UART_MODEM[9])���Կ���NRTS���������NRTS�ź��෴���Dz��෴���û����Զ�ȡRTSSTS(UART_MODEM[13])λ,�Ի����ʵ��NRT���������ѹ��״̬��
ͼ6.5-8 UART nRTS�Զ���������������
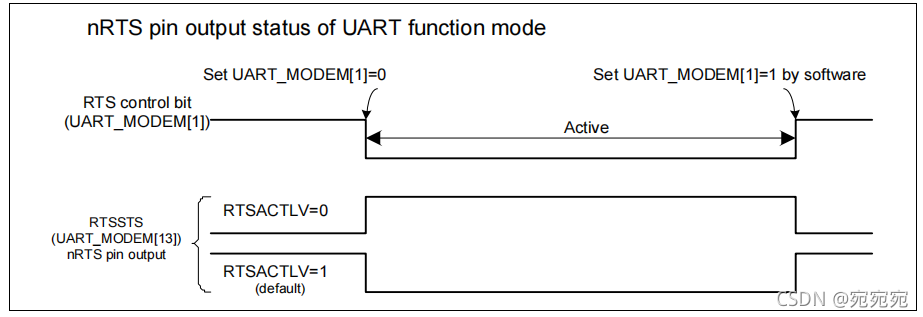
��ͼ6.5-9��ʾ,������ģʽ(ATORTSEN(UART_INTEN[12])=0)��,NRTS����ֱ����RTS(UART_MODEM[1])����λ��������̿��ơ�
����RTSACTLV(UART_MODEM[9])�ɸ���RTS(UART_MODEM[1])����λ����NRTS��������Ƿ�ת���ǷǷ�ת���û����Զ�ȡRTSSTS(UART_MODEM[13])λ,�Ի����ʵ��NRT���������ѹ��״̬��
ͼ6.5-9 ���������Ƶ�UART nRTS�Զ���ˮ��
6.5.9,IrDA����ģʽ
UART���������ṩ����IrDA(SIR,���к���)����(��UART_FUNCSEL[1:0]����Ϊ��10��������IrDA����)��SIR�淶������һ�־���1����ʼλ��8������λ��1��ֹͣλ�Ķ̳̺����첽���д���ģʽ�������������Ϊ115.2 kbps��IrDA SIR�����IrDA SIRЭ�������/��������IrDA SIRЭ���Ϊ��˫�������,������ͬʱ����ͽ������ݡ�IrDA SIR������涨����ͽ���֮�����С�����ӳ�Ϊ10 ms,���ӳٹ��ܱ���������ʵ�֡�
��IrDAģʽ��,�������BAUDM1(UART_Baud[29])��
������=ʱ��/(16*(BRD+2)) ,����BRD(UART_BAUD[15:0])��UART_BAUD�Ĵ����еIJ����ʷ�Ƶ����
ע:IrDA������IrDA�ӻ�֮��IJ������ݲ�Ϊ��5%��
IrDA���ƿ�ͼ��ͼ6.5-10��ʾ��
ͼ6.5-10 IrDA���ƿ�ͼ
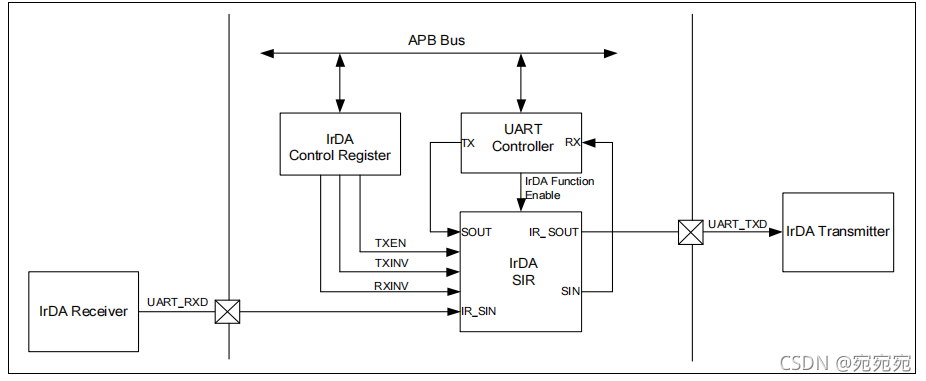
IrDA SIR���ͱ�����( IrDA SIR Transmit Encoder)
IrDA SIR���ͱ�������UART����ķǹ���(NRZ)����λ�����е��ơ�IrDA SIR������涨ʹ�ù��㷴ת(RZI)���Ʒ���,�÷�������0��ʾΪ��������塣���ƺ����������������䵽�ⲿ����������ͺ��ⷢ������ܡ�
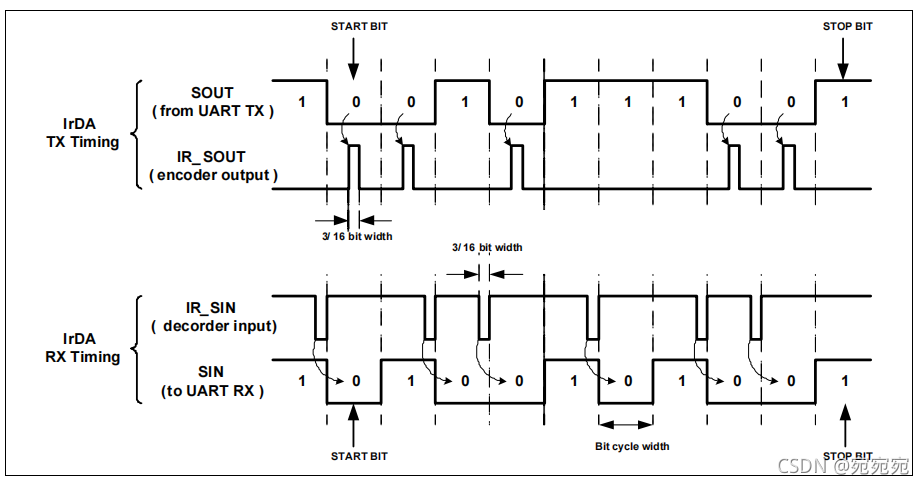
�����������ָ��Ϊ�����ʵ�3/16����
IrDA SIR���ս�����(IrDA SIR Receive Decoder)
IrDA SIR���ս���������������������Ĺ��������,����NRZ���б����������UART���յ��������롣
�ڿ���״̬��,����������Ϊ�ߵ�ƽ��������������Ϊ��ʱ,����ʼλ��������������,RXINV(UART_IrDA[6])����Ϊ��1��,TXINV(UART_IrDA[5])����Ϊ��0����
IrDA SIR����
IrDA SIR������/�������ṩ��UART�������Ͱ�˫������SIR�ӿ�֮�����ת���Ĺ��ܡ�ͼ6.5-11ΪIrDA����������Ρ�
ͼ6.5-11 IrDA TX/RXʱ��ͼ
6.5.10,LIN����ģʽ(���ػ�������)
UART������֧��LIN���ܡ���FUNCSEL(UART_FUNCSEL[1:0])����Ϊ��01����ѡ��LINģʽ������UART������֧��LIN����ģʽ�µ�LIN�ж�/�ָ������ɺ��ж�/�ָ������,��֧��LIN��ģʽ�µı�ͷ�����Զ�����ͬ����
LIN֡�ṹ
����LINЭ��,���д������Ϣ�����Ϊ֡;֡��ͷ��(���������ṩ)����Ӧ(�ɴ������ṩ)��ɡ���ͷ(���������ṩ)��һ���ж����һ��ͬ�������,���һ��֡��ʶ��(֡ID)��֡��ʶ��Ψһ�ض���֡��Ŀ�ġ�ָ���������������ṩ��֡ID���������Ӧ����Ӧ�������ֶκ�У����ֶ���ɡ�
LIN�ֽڵĽṹ
��LINģʽ��,����LIN��,ÿ���ֽ��ֶ���һ��ֵΪ0(����)����ʼλ����,Ȼ����8������λ������żУ��λ,LSB������ֵΪ1(����)��1��ֹͣλ,�����ֵΪ1(����)��ֹͣλ��
LIN����ģʽ
UART������֧��LIN����ģʽ��Ҫʹ�ܲ���ʼ��LIN����ģʽ,��Ҫִ�����²���:
- ����UART_BAUD�Ĵ�����ѡ������IJ����ʡ�
- ��WLS(UART_LINE[1:0])����Ϊ��11����8λ�����ֳ�,���PBE(UART_LIN E[3])λ�Խ�����żУ��,�����NSB(UART_LIN E[2])λ������һ��ֹͣλ��
- ��FUNCSEL(UART_FUNCSEL[1:0])����Ϊ��01��,ѡ��LIN����ģʽ������
������,��������ֲ�
6.5.11,RS-485����ģʽ
UART����������һ�����������RS-485����(�û����뽫UART_FUNCSEL[1:0]����Ϊ��11����������RS-485����),�Լ���NRTS���Ŵ��첽���ж˿��ṩ�ķ�����ơ�RS-485�շ���������ͨ��ʹ��NRTS�����ź�ʹ��RS-485��������ʵ�ֵġ�RX��TX������������RS-485ģʽ�µ�UART��ͬ��
UART��������������ΪRS-485��Ѱַ�ӻ�,RS-485����������ͨ������żУ��(��9λ)����Ϊ1��ʶ���ַ�ַ������������ַ�,��żУ������Ϊ0��������ʹ��UART_LINE�Ĵ������Ƶ�9λ(��PBE��EPE��SPE����ʱ,��9λ����0,��PBE��SPE������EPE��0ʱ,��9λ����1)��
�ÿ�����֧�����ֹ���ģʽ:RS-485������㹤��ģʽ(NMM)��RS485�Զ���ַ����ģʽ(AAD)��RS-485�Զ�������ƹ���ģʽ(AUD)����������ͨ����UART_ALTCTL�Ĵ������б����ѡ���κι���ģʽ,��ͨ������DLY(UART_TOUT[15:8])�Ĵ����������뿪Tx FIFO�����һ��ֹͣλ���ȥ��λ֮��Ĵ����ӳ�ʱ�䡣
����ģʽ������,��������ֲ�
6.5.11,PDMA���亯��
UART������֧��PDMA���亯����ͨ������PDMA����,��UART_DAT����ΪPDMAĿ�ĵ�ַ����TXPDMAEN(UART_INTEN[14])����Ϊ1ʱ,����������PDMA�����������Զ���ʼPDMA������̵�����
ͨ������PDMA����,��UART_DAT����ΪPDMAԴ��ַ����RXPDMAEN(UART_INTEN[15])����Ϊ1ʱ,����������ʼPDMA���չ��̡���RX FIFO��������������ʱ,UART���������Զ���PDMA��������������
ע��: ���STOPn(PDMA_STOP[n])����ΪֹͣUART RXPDMA����,��UART����δ��ɡ�UART����������ɵ�ǰ���������ڽ��ջ������еĴ���ʹ洢��ͨ����ȡRXEMPTY(UART_FIFOSTS[14])�����ջ��������Ƿ�����Ч���ݡ�
6.5.12,Register Map and Register Description
��,��������ֲ�
ע:Ƶ��ֱ������͵õ�Ҫ��Ƶ�����������ĸ�����
�ο�����1: ���ڡ������ʵȸ���.
�ο�����2: �����ʡ�����/����ʱ�� ��������봫�����ʵĹ�ϵ�� .
�ο�����3: ʱ��Ƶ�ʡ������ʡ��������ӹ�ϵ���. ??