���
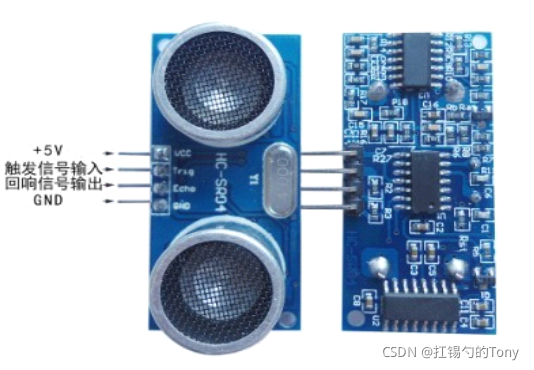
HC-SR04���������ģ����ṩ2cm-400cm�ķǽӴ�ʽ����в��,��ྫ�ȿɸߴ�23mm��ģ�����������������������������Ƶ�·
��ģ�������ĸ��ӿ�:
- VCC��GNDΪ�����,VCC��5V,GND����͵�Ƭ������(����Ҫ,����Ƭ���ṩһ���͵�ƽ�ο�,�����������ͨ�Ż���Ҷ����¶�ȡ������ֵ����)
- TRIG��ECHOΪͨ�Ŷ�,TRIG�Ǵ��������ź�����,ECHO�ǻ����ź����
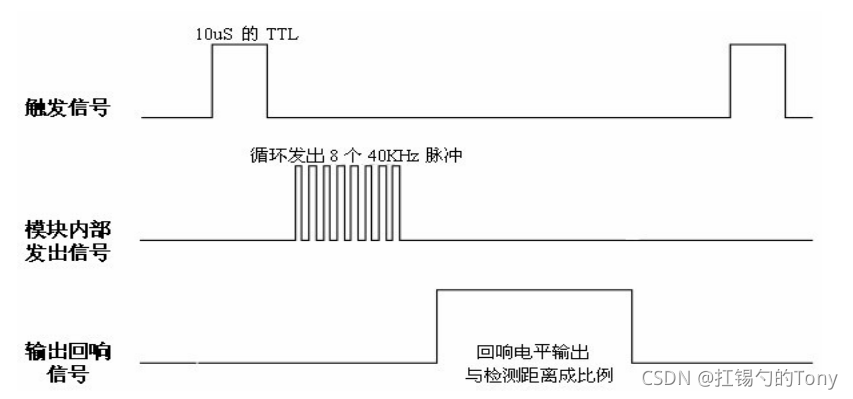
����ԭ��
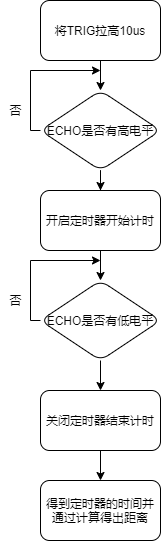
��Ƭ����TRIG�����ṩһ��10us���ϵĸߵ�ƽ,��ģ�齫������ǰ������һ��������,������������ǰ�����ϰ�����᷵��,ģ����յ����صij�����ʱ,ECHO���Żᴥ��Ϊ�ߵ�ƽ,Ȼ��Ƭ��ֻ��Ҫ��ECHO���ŵȴ���ȡ�ߵ�ƽ�ź�,�����ĸߵ�ƽ����ʱ����dz������ӷ��������յ������ʱ��,�ٸ�������Ϊ340m/s����Լ����������ģ������ϰ���ľ���
ע��:
1. ���ʱ,������������������0.5�O�Ҿ���ƽ��
2. �����������Ϊ60ms����,�Է�ֹ�����źŶԻ����źŵ�Ӱ��
STM32����
�������IO������
����������Ҫ��������IO����ʵ��SMT32��HC-SR04֮���ͨ��,һ����������ߵ�ƽ,��һ�����ߵ�ƽ��
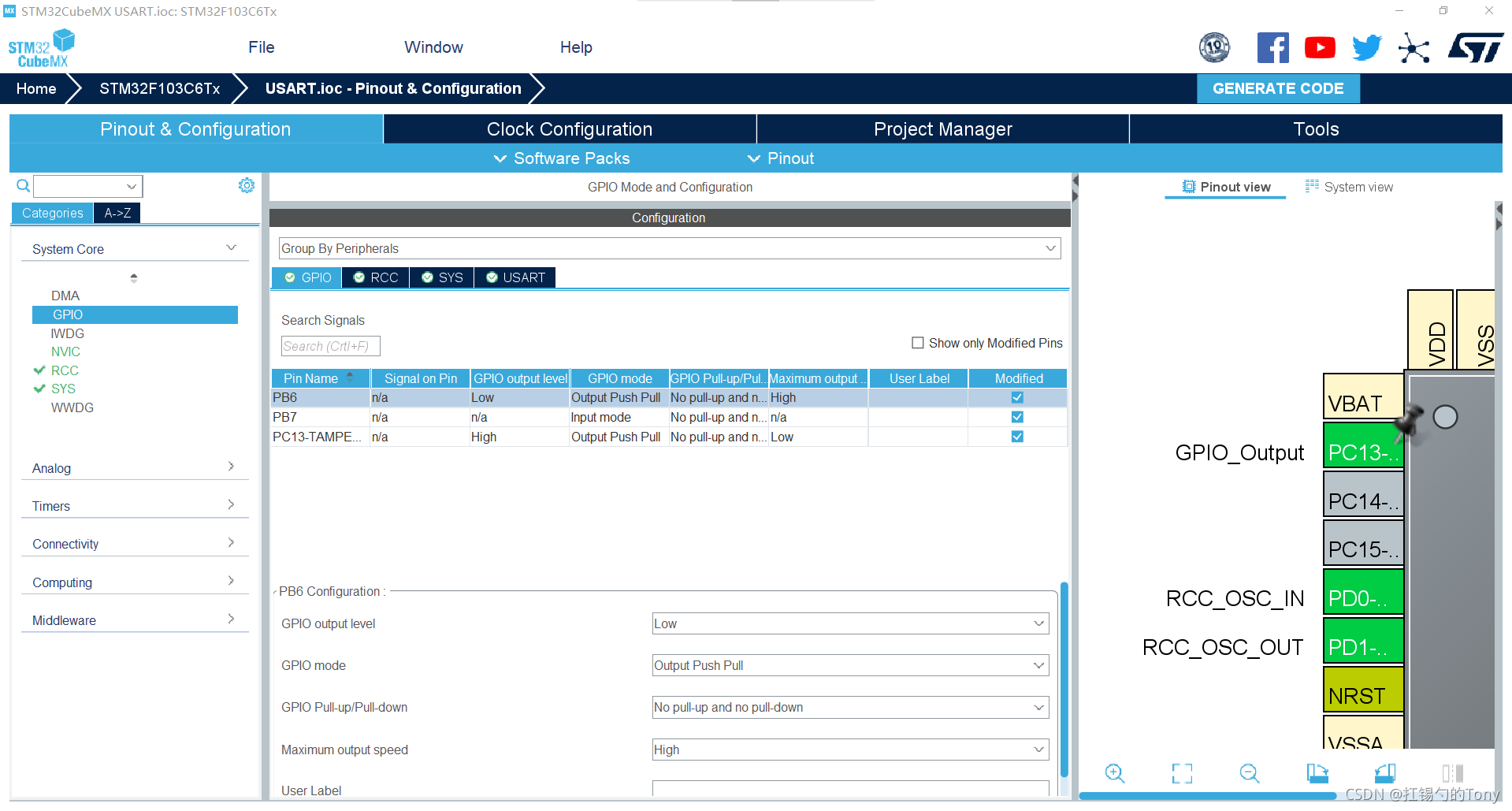
- ����ʹ��CubeMXѡ������GPIO,������Ϊ���������������,����ѡ��PB6��PB7
��ʱ���жϼ�ʱ
����ʹ�ø�ģ������Ҫ�IJ���,�Ըߵ�ƽ����ʱ��ľ���ʱ,��������ʹ�ö�ʱ���жϽ��м�ʱ
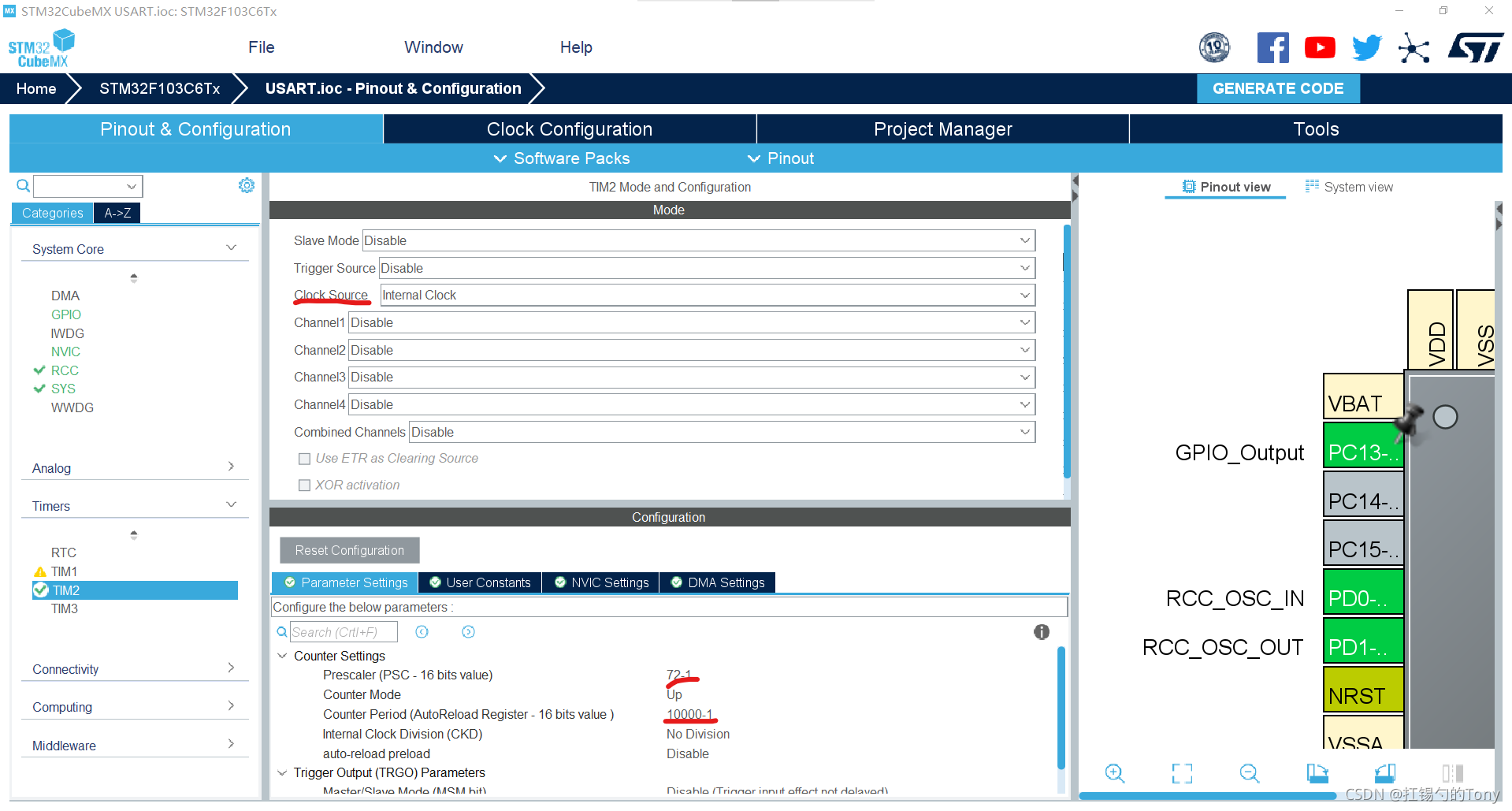
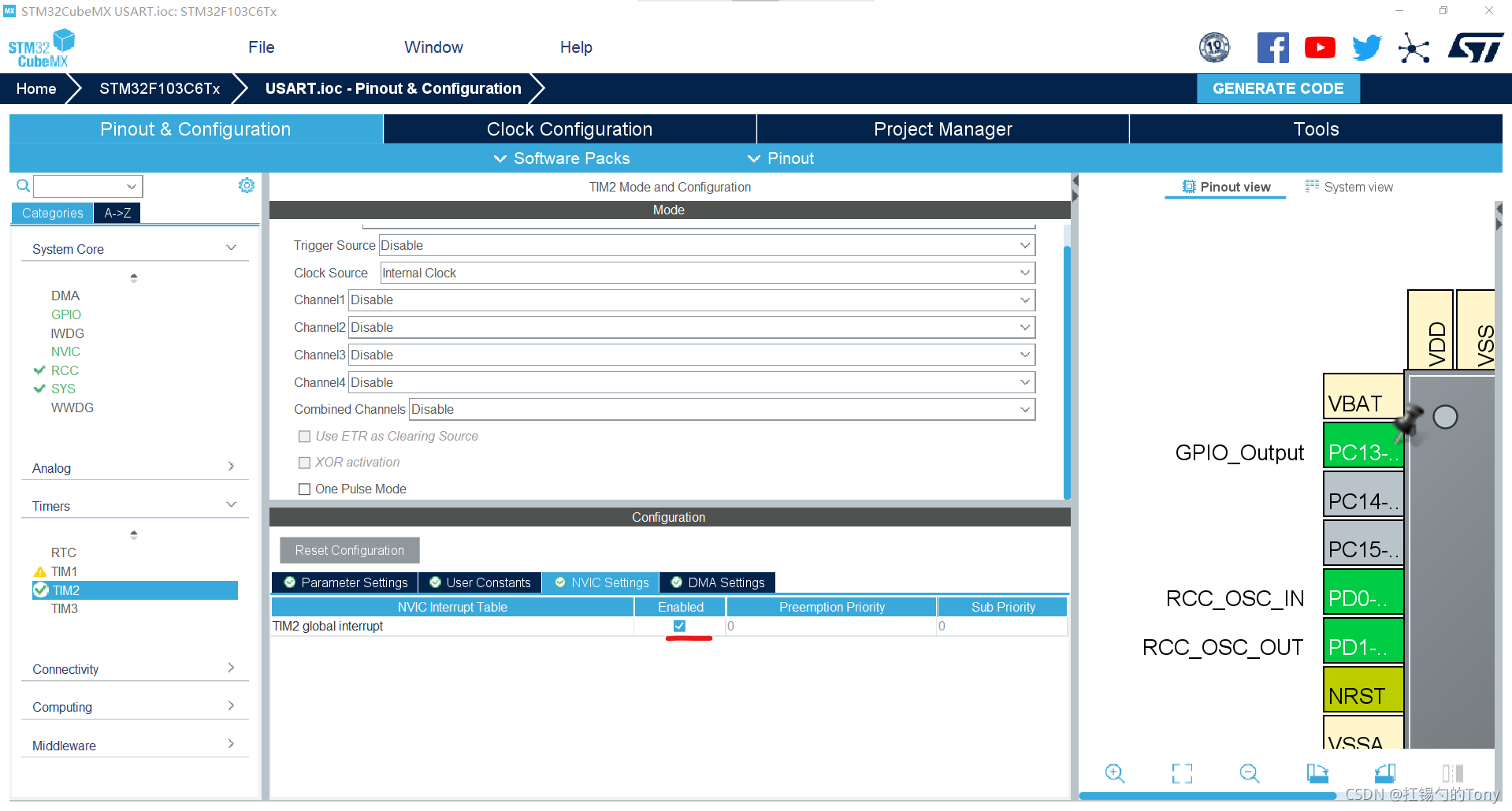
- ʹ��CubeMXѡ��һ����ʱ��,����ѡ��TIM2,������ͼ����,��Ԥ��Ƶϵ������Ϊ72-1,��װ��ֵΪ10000-1,������ʱ��������ÿ10000us����һ���ж�(����ϵͳʱ��Ϊ72MHz)������ֻ��Ҫ��¼��ʱ�������жϵĴ����Ͷ�ʱ����CNT��ֵ���ܼ������ʱ���ӿ������ر���������ʱ��:
Times=TimeCNT*10000+CNT
- Ϊ��ʵ�ֶԶ�ʱ�������жϴ����ļ�¼,������Ҫ��CubeMX���ɵ��жϺ���TIM2_IRQHandler,�ú�����stm32f1xx_it.c��,�ҵ�������������(����TimerCntΪȫ�ֱ���,�ǵ�����ͷ�ļ�)
/* USER CODE BEGIN Includes */
#include "ultrasound.h"
/* USER CODE END Includes */
/*��*/
/******************************************************************************/
/* STM32F1xx Peripheral Interrupt Handlers */
/* Add here the Interrupt Handlers for the used peripherals. */
/* For the available peripheral interrupt handler names, */
/* please refer to the startup file (startup_stm32f1xx.s). */
/******************************************************************************/
/**
* @brief This function handles TIM2 global interrupt.
*/
void TIM2_IRQHandler(void)
{
/* USER CODE BEGIN TIM2_IRQn 0 */
/* USER CODE END TIM2_IRQn 0 */
HAL_TIM_IRQHandler(&htim2);
/* USER CODE BEGIN TIM2_IRQn 1 */
TimerCnt++; //���������жϵĴ���
/* USER CODE END TIM2_IRQn 1 */
}
������
- ����.h�ļ�
#ifndef __ULTRASOUND_H__
#define __ULTRASOUND_H__
#include "sys.h"
#define Trig PBout(6)
#define Echo PBin(7)
extern uint32_t TimerCnt; //��ʱ���жϵĴ���(����CubeMX���ɵ��жϺ���TIM2_IRQHandler��)
uint32_t GetTIM2Times(void);
float GetUltrasoundDistance(void);
#endif
- ����.c�ļ�
#include "ultrasound.h"
#include "delay.h"
#include "tim.h"
#include "usart.h"
uint32_t TimerCnt=0;
/*
*********************************************************************************************************
* �� �� ��: GetTIM2Times
* ����˵��: ���㶨ʱ��2��ʱ��ʱ�䳤��(��λ:us)
* �� ��: ��
* �� �� ֵ: ��ʱ��2��ʱ��ʱ��
*********************************************************************************************************
*/
uint32_t GetTIM2Times(void)
{
/*���ض�ʱ����ʱ��ʱ��,��ʽ:Timer=TimerCnt*65535+CNT*/
uint32_t times=0;
times=htim2.Instance->CNT+TimerCnt*10000;
TimerCnt=0; //�жϼ�ʱ��0
htim2.Instance->CNT=0; //��ʱ������ֵ��0
delay_ms(50);
return times; //����ʱ��
}
/*
*********************************************************************************************************
* �� �� ��: GetUltrasoundDistance
* ����˵��: �����ȡ��ǰ���������ģ���õľ���
* �� ��: ��
* �� �� ֵ: ���������ľ���
*********************************************************************************************************
*/
float GetUltrasoundDistance(void)
{
uint32_t times=0;
Trig=1;
delay_us(11); //��Trig��������10us
Trig=0;
while(Echo==0); //�ȴ��ߵ�ƽ
HAL_TIM_Base_Start(&htim2); //����TIM2��ʼ��ʱ
while(Echo==1); //�ȴ��͵�ƽ
HAL_TIM_Base_Stop(&htim2); //�ر�TIM2ֹͣ��ʱ
times=GetTIM2Times(); //��ȡTIM2��ʱ��
printf("times=%d\r\n",times);
return times/58.0;
}