1.AHT20温度采集
1.IIC简介
IIC(Inter Integrated Circuit) 总线是一种由 PHILIPS 公司开发的两线式串行总线,用于连接微控制器及其外围设备。它是由数据线 SDA和时钟SCL 构成的串行总线,可发送和接收数据。在CPU与被控 IC 之间、IC与IC之间进行双向传送, 高速 IIC 总线 一般可达 400kbps 以上 。
IIC总线在传送数据过程中共有三种类型信号, 它们分别是:开始信号、结束信号和应答信号。
开始信号:SCL为高电平时,SDA由高电平向低电平跳变,开始传送数据。
结束信号:SCL为高电平时,SDA由低电平向高电平跳变,结束传送数据。
应答信号:接收数据的IC在接收到8bit数据后,向发送数据的IC发出特定的低电平脉冲,表示已收到数据。CPU向受控单元发出一个信号后,等待受控单元发出一个应答信号,CPU接收到应答信号后,根据实际情况作出是否继续传递信号的判断。若未收到应答信号,由判断为受控单元出现故障。
2.AHT20温度采集实现
首先创建一个新的工程。工程使用的芯片为stm32f103c8芯片。
关于AHT20具体资料可以通过AHT20官网获取,其中提供了大量关于如何使用该模块的资料。在其中下载相关资料。提取重新fputc()函数,方便使用printf通过串口输出数据
fputc:
int fputc(int ch, FILE *f)
{
while((USART1->SR&0X40)==0);//?-?・・¢?í,?±μ?・¢?ííê±?
USART1->DR = (u8) ch;
return ch;
}
读取数据
void readinfo(uint32_t *H1,uint32_t *T1){
uint8_t readByte[6];
uint8_t ack_status=0;
uint8_t AHT20_OutData[4];
delay_ms(10);
reset_AHT20();
delay_ms(10);
init_AHT20();
delay_ms(10);
startMeasure_AHT20();
delay_ms(80);
for(i=0; i<6; i++)
{
readByte[i]=0;
}
//-------------
I2C_Start();
I2C_WriteByte(0x71);
ack_status = Receive_ACK();
readByte[0]= I2C_ReadByte();
Send_ACK();
readByte[1]= I2C_ReadByte();
Send_ACK();
readByte[2]= I2C_ReadByte();
Send_ACK();
readByte[3]= I2C_ReadByte();
Send_ACK();
readByte[4]= I2C_ReadByte();
Send_ACK();
readByte[5]= I2C_ReadByte();
SendNot_Ack();
//Send_ACK();
I2C_Stop();
//--------------
if( (readByte[0] & 0x68) == 0x08 )
{
*H1 = readByte[1];
*H1 = (*H1<<8) | readByte[2];
*H1 = (*H1<<8) | readByte[3];
*H1 = *H1>>4;
*H1 = (*H1*1000)/1024/1024;
*T1 = readByte[3];
*T1 = *T1 & 0x0000000F;
*T1 = (*T1<<8) | readByte[4];
*T1 = (*T1<<8) | readByte[5];
*T1 = (*T1*2000)/1024/1024 - 500;
AHT20_OutData[0] = (*H1>>8) & 0x000000FF;
AHT20_OutData[1] = *H1 & 0x000000FF;
AHT20_OutData[2] = (*T1>>8) & 0x000000FF;
AHT20_OutData[3] = *T1 & 0x000000FF;
}
else
{
AHT20_OutData[0] = 0xFF;
AHT20_OutData[1] = 0xFF;
AHT20_OutData[2] = 0xFF;
AHT20_OutData[3] = 0xFF;
printf("lyy");
}
printf("\r\n");
printf("温度:%d%d.%d",*T1/100,(*T1/10)%10,*T1%10);
printf("湿度:%d%d.%d",*H1/100,(*H1/10)%10,*H1%10);
printf("\r\n");
}
关于这里使用到的i2c相关函数,可以从野火开发版获取到相关资料,。具体代码如下:
bsp_i2c.c
#include "bsp_i2c.h"
#include "delay.h"
uint8_t ack_status=0;
uint8_t readByte[6];
uint8_t AHT20_status=0;
uint32_t H1=0; //Humility
uint32_t T1=0; //Temperature
uint8_t AHT20_OutData[4];
uint8_t AHT20sendOutData[10] = {0xFA, 0x06, 0x0A, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xFF};
void IIC_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ; //í?íìê?3?
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
IIC_SCL=1;
IIC_SDA=1;
}
void IIC_Start(void)
{
SDA_OUT();
IIC_SDA=1;
IIC_SCL=1;
delay_us(4);
IIC_SDA=0;//START:when CLK is high,DATA change form high to low
delay_us(4);
IIC_SCL=0;
}
void IIC_Stop(void)
{
SDA_OUT();
IIC_SCL=0;
IIC_SDA=0;//STOP:when CLK is high DATA change form low to high
delay_us(4);
IIC_SCL=1;
IIC_SDA=1;//・¢?íI2C×ü???áê?D?o?
delay_us(4);
}
u8 IIC_Wait_Ack(void)
{
u8 ucErrTime=0;
SDA_IN();
IIC_SDA=1;delay_us(1);
IIC_SCL=1;delay_us(1);
while(READ_SDA)
{
ucErrTime++;
if(ucErrTime>250)
{
IIC_Stop();
return 1;
}
}
IIC_SCL=0;
return 0;
}
//2úéúACKó|′e
void IIC_Ack(void)
{
IIC_SCL=0;
SDA_OUT();
IIC_SDA=0;
delay_us(2);
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
}
//2?2úéúACKó|′e
void IIC_NAck(void)
{
IIC_SCL=0;
SDA_OUT();
IIC_SDA=1;
delay_us(2);
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
}
void IIC_Send_Byte(u8 txd)
{
u8 t;
SDA_OUT();
IIC_SCL=0;
for(t=0;t<8;t++)
{
IIC_SDA=(txd&0x80)>>7;
txd<<=1;
delay_us(2);
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
delay_us(2);
}
}
u8 IIC_Read_Byte(unsigned char ack)
{
unsigned char i,receive=0;
SDA_IN();//SDAéè???aê?è?
for(i=0;i<8;i++ )
{
IIC_SCL=0;
delay_us(2);
IIC_SCL=1;
receive<<=1;
if(READ_SDA)receive++;
delay_us(1);
}
if (!ack)
IIC_NAck();//・¢?ínACK
else
IIC_Ack(); //・¢?íACK
return receive;
}
void IIC_WriteByte(uint16_t addr,uint8_t data,uint8_t device_addr)
{
IIC_Start();
if(device_addr==0xA0)
IIC_Send_Byte(0xA0 + ((addr/256)<<1));
else
IIC_Send_Byte(device_addr);
IIC_Send_Byte(addr&0xFF);
IIC_Wait_Ack();
IIC_Send_Byte(data);
IIC_Wait_Ack();
IIC_Stop();
if(device_addr==0xA0)
delay_ms(10);
else
delay_us(2);
}
uint16_t IIC_ReadByte(uint16_t addr,uint8_t device_addr,uint8_t ByteNumToRead) //?á??′??÷?ò?áêy?Y
{
uint16_t data;
IIC_Start();
if(device_addr==0xA0)
IIC_Send_Byte(0xA0 + ((addr/256)<<1));
else
IIC_Send_Byte(device_addr);
IIC_Wait_Ack();
IIC_Send_Byte(addr&0xFF); //・¢?íμíμ??・
IIC_Wait_Ack();
IIC_Start();
IIC_Send_Byte(device_addr+1); //・¢?÷?tμ??・
IIC_Wait_Ack();
if(ByteNumToRead == 1)//LM75???èêy?Y?a11bit
{
data=IIC_Read_Byte(0);
}
else
{
data=IIC_Read_Byte(1);
data=(data<<8)+IIC_Read_Byte(0);
}
IIC_Stop();//2úéúò???í£?1ì??t
return data;
}
void read_AHT20_once(void)
{
delay_ms(10);
reset_AHT20();
delay_ms(10);
init_AHT20();
delay_ms(10);
startMeasure_AHT20();
delay_ms(80);
read_AHT20();
delay_ms(5);
}
void reset_AHT20(void)
{
I2C_Start();
I2C_WriteByte(0x70);
ack_status = Receive_ACK();
if(ack_status) printf("1");
else printf("1-n-");
I2C_WriteByte(0xBA);
ack_status = Receive_ACK();
if(ack_status) printf("2");
else printf("2-n-");
I2C_Stop();
}
void init_AHT20(void)
{
I2C_Start();
I2C_WriteByte(0x70);
ack_status = Receive_ACK();
if(ack_status) printf("3");
else printf("3-n-");
I2C_WriteByte(0xE1);
ack_status = Receive_ACK();
if(ack_status) printf("4");
else printf("4-n-");
I2C_WriteByte(0x08);
ack_status = Receive_ACK();
if(ack_status) printf("5");
else printf("5-n-");
I2C_WriteByte(0x00);
ack_status = Receive_ACK();
if(ack_status) printf("6");
else printf("6-n-");
I2C_Stop();
}
void startMeasure_AHT20(void)
{
//------------
I2C_Start();
I2C_WriteByte(0x70);
ack_status = Receive_ACK();
if(ack_status) printf("7");
else printf("7-n-");
I2C_WriteByte(0xAC);
ack_status = Receive_ACK();
if(ack_status) printf("8");
else printf("8-n-");
I2C_WriteByte(0x33);
ack_status = Receive_ACK();
if(ack_status) printf("9");
else printf("9-n-");
I2C_WriteByte(0x00);
ack_status = Receive_ACK();
if(ack_status) printf("10");
else printf("10-n-");
I2C_Stop();
}
void read_AHT20(void)
{
uint8_t i;
for(i=0; i<6; i++)
{
readByte[i]=0;
}
//-------------
I2C_Start();
I2C_WriteByte(0x71);
ack_status = Receive_ACK();
readByte[0]= I2C_ReadByte();
Send_ACK();
readByte[1]= I2C_ReadByte();
Send_ACK();
readByte[2]= I2C_ReadByte();
Send_ACK();
readByte[3]= I2C_ReadByte();
Send_ACK();
readByte[4]= I2C_ReadByte();
Send_ACK();
readByte[5]= I2C_ReadByte();
SendNot_Ack();
//Send_ACK();
I2C_Stop();
//--------------
if( (readByte[0] & 0x68) == 0x08 )
{
H1 = readByte[1];
H1 = (H1<<8) | readByte[2];
H1 = (H1<<8) | readByte[3];
H1 = H1>>4;
H1 = (H1*1000)/1024/1024;
T1 = readByte[3];
T1 = T1 & 0x0000000F;
T1 = (T1<<8) | readByte[4];
T1 = (T1<<8) | readByte[5];
T1 = (T1*2000)/1024/1024 - 500;
AHT20_OutData[0] = (H1>>8) & 0x000000FF;
AHT20_OutData[1] = H1 & 0x000000FF;
AHT20_OutData[2] = (T1>>8) & 0x000000FF;
AHT20_OutData[3] = T1 & 0x000000FF;
}
else
{
AHT20_OutData[0] = 0xFF;
AHT20_OutData[1] = 0xFF;
AHT20_OutData[2] = 0xFF;
AHT20_OutData[3] = 0xFF;
printf("lyy");
}
printf("\r\n");
printf("温度:%d%d.%d",T1/100,(T1/10)%10,T1%10);
printf("湿度:%d%d.%d",H1/100,(H1/10)%10,H1%10);
printf("\r\n");
}
uint8_t Receive_ACK(void)
{
uint8_t result=0;
uint8_t cnt=0;
IIC_SCL = 0;
SDA_IN();
delay_us(4);
IIC_SCL = 1;
delay_us(4);
while(READ_SDA && (cnt<100))
{
cnt++;
}
IIC_SCL = 0;
delay_us(4);
if(cnt<100)
{
result=1;
}
return result;
}
void Send_ACK(void)
{
SDA_OUT();
IIC_SCL = 0;
delay_us(4);
IIC_SDA = 0;
delay_us(4);
IIC_SCL = 1;
delay_us(4);
IIC_SCL = 0;
delay_us(4);
SDA_IN();
}
void SendNot_Ack(void)
{
SDA_OUT();
IIC_SCL = 0;
delay_us(4);
IIC_SDA = 1;
delay_us(4);
IIC_SCL = 1;
delay_us(4);
IIC_SCL = 0;
delay_us(4);
IIC_SDA = 0;
delay_us(4);
}
void I2C_WriteByte(uint8_t input)
{
uint8_t i;
SDA_OUT();
for(i=0; i<8; i++)
{
IIC_SCL = 0;
delay_ms(5);
if(input & 0x80)
{
IIC_SDA = 1;
//delaymm(10);
}
else
{
IIC_SDA = 0;
//delaymm(10);
}
IIC_SCL = 1;
delay_ms(5);
input = (input<<1);
}
IIC_SCL = 0;
delay_us(4);
SDA_IN();
delay_us(4);
}
uint8_t I2C_ReadByte(void)
{
uint8_t resultByte=0;
uint8_t i=0, a=0;
IIC_SCL = 0;
SDA_IN();
delay_ms(4);
for(i=0; i<8; i++)
{
IIC_SCL = 1;
delay_ms(3);
a=0;
if(READ_SDA)
{
a=1;
}
else
{
a=0;
}
//resultByte = resultByte | a;
resultByte = (resultByte << 1) | a;
IIC_SCL = 0;
delay_ms(3);
}
SDA_IN();
delay_ms(10);
return resultByte;
}
void set_AHT20sendOutData(void)
{
/* --------------------------
* 0xFA 0x06 0x0A temperature(2 Bytes) humility(2Bytes) short Address(2 Bytes)
* And Check (1 byte)
* -------------------------*/
AHT20sendOutData[3] = AHT20_OutData[0];
AHT20sendOutData[4] = AHT20_OutData[1];
AHT20sendOutData[5] = AHT20_OutData[2];
AHT20sendOutData[6] = AHT20_OutData[3];
// AHT20sendOutData[7] = (drf1609.shortAddress >> 8) & 0x00FF;
// AHT20sendOutData[8] = drf1609.shortAddress & 0x00FF;
// AHT20sendOutData[9] = getXY(AHT20sendOutData,10);
}
void I2C_Start(void)
{
SDA_OUT();
IIC_SCL = 1;
delay_ms(4);
IIC_SDA = 1;
delay_ms(4);
IIC_SDA = 0;
delay_ms(4);
IIC_SCL = 0;
delay_ms(4);
}
void I2C_Stop(void)
{
SDA_OUT();
IIC_SDA = 0;
delay_ms(4);
IIC_SCL = 1;
delay_ms(4);
IIC_SDA = 1;
delay_ms(4);
}
bsp_i2c.h
#ifndef __BSP_I2C_H
#define __BSP_I2C_H
#include "sys.h"
#include "delay.h"
#include "usart.h"
//ê1ó?IIC1 1ò??M24C02,OLED,LM75AD,HT1382 PB6,PB7
#define SDA_IN() {GPIOB->CRL&=0X0FFFFFFF;GPIOB->CRL|=(u32)8<<28;}
#define SDA_OUT() {GPIOB->CRL&=0X0FFFFFFF;GPIOB->CRL|=(u32)3<<28;}
//IO2ù×÷oˉêy
#define IIC_SCL PBout(6) //SCL
#define IIC_SDA PBout(7) //SDA
#define READ_SDA PBin(7) //ê?è?SDA
//IIC?ùóD2ù×÷oˉêy
void IIC_Init(void); //3?ê??ˉIICμ?IO?ú
void IIC_Start(void); //・¢?íIIC?aê?D?o?
void IIC_Stop(void); //・¢?íIICí£?1D?o?
void IIC_Send_Byte(u8 txd); //IIC・¢?íò???×??ú
u8 IIC_Read_Byte(unsigned char ack);//IIC?áè?ò???×??ú
u8 IIC_Wait_Ack(void); //IICμè′yACKD?o?
void IIC_Ack(void); //IIC・¢?íACKD?o?
void IIC_NAck(void); //IIC2?・¢?íACKD?o?
void IIC_WriteByte(uint16_t addr,uint8_t data,uint8_t device_addr);
uint16_t IIC_ReadByte(uint16_t addr,uint8_t device_addr,uint8_t ByteNumToRead);//??′??÷μ??・£??÷?tμ??・£?òa?áμ?×??úêy
void read_AHT20_once(void);
void reset_AHT20(void);
void init_AHT20(void);
void startMeasure_AHT20(void);
void read_AHT20(void);
uint8_t Receive_ACK(void);
void Send_ACK(void);
void SendNot_Ack(void);
void I2C_WriteByte(uint8_t input);
uint8_t I2C_ReadByte(void);
void set_AHT20sendOutData(void);
void I2C_Start(void);
void I2C_Stop(void);
#endif
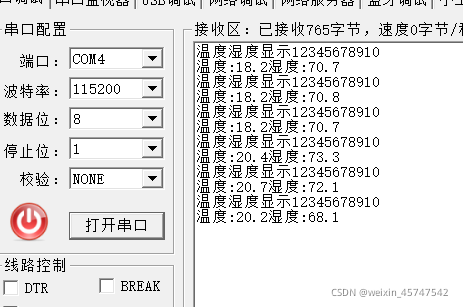
main函数中代码如下・:
delay_init(); ˉ
uart_init(115200);
IIC_Init();
NVIC_Configuration(); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
while(1)
{
printf("温度湿度显示");
readinfo(&t1,&t2);
delay_ms(2500);
测试效果如下:
2、通过spi在oled屏上显示数据
1).spi简介
SPI( Serial Peripheral Interface-串行外设接口)总线系统是一种同步串行外设接口,它可以使MCU与各种外围设备以串行方式进行通信以交换信息。SPI有三个寄存器分别为: 控制寄存器SPCR,状态寄存器SPSR,数据寄存器SPDR。外围设备包括 FLASHRAN、网络控制器、LCD显示驱动器、A/D转换器和MCU等。SPI总线系统可直接与各个厂家生产的多种标准外围器件直接接口,该接口一般使用4条线:串行时钟线(SCLK)、主机输入/从机输出数据线MISO、主机输出/从机输入数据线MOS和低电平有效的从机选择线NSS(有的SP接口芯片带有中断信号线NT、有的SPI接口芯片没有主机输出/从机输入数据线MOSI)
2)获取资料
可以从oled wiki上找到使用的oled屏资料。从其中下载资料,将其中的gui.c,oled.c和oledfont.h以及c文件对应头文件复制到工程目录,将两个c文件和oledfont.h添加进工程。
3)屏幕显示
在gui.h中,厂家已经实现了相当多的显示函数,只要通过调用函数即可显示
相关显示函数如下:
//x,y起始坐标,size大小,mode显示模式1:黑字,0:白字
void GUI_ShowChar(u8 x,u8 y,u8 chr,u8 Char_Size,u8 mode);
void GUI_ShowNum(u8 x,u8 y,u32 num,u8 len,u8 Size,u8 mode);
void GUI_ShowString(u8 x,u8 y,u8 *chr,u8 Char_Size,u8 mode);
void GUI_ShowFont16(u8 x,u8 y,u8 *s,u8 mode);
void GUI_ShowFont24(u8 x,u8 y,u8 *s,u8 mode);
void GUI_ShowFont32(u8 x,u8 y,u8 *s,u8 mode);
void GUI_ShowCHinese(u8 x,u8 y,u8 hsize,u8 *str,u8 mode);
4)滚动显示
滚动显示函数定义如下
void roll(char* c)
{
OLED_WR_Byte(0x2E,OLED_CMD); //关闭滚动
OLED_WR_Byte(0x27,OLED_CMD); //水平向左或者右滚动 26/27
OLED_WR_Byte(0x00,OLED_CMD); //虚拟字节
OLED_WR_Byte(0x00,OLED_CMD); //起始页 0
OLED_WR_Byte(0x07,OLED_CMD); //滚动时间间隔
OLED_WR_Byte(0x07,OLED_CMD); //终止页 7
OLED_WR_Byte(0x00,OLED_CMD); //虚拟字节
OLED_WR_Byte(0xFF,OLED_CMD); //虚拟字节
GUI_ShowCHinese(0,16,16,c,1);
OLED_WR_Byte(0x2F,OLED_CMD); //开启滚动
delay_ms(2000);
}
注意,在开启滚动前应先让数据显示在屏幕上,否则可能会产生预料之外的效果。
5)显示实现
main函数内如下所示:
delay_init();
uart_init(115200);
IIC_Init();
NVIC_Configuration();
OLED_Init(); //初始化OLED
OLED_Clear(0); //清屏(全黑)
while(1)
{
GUI_ShowCHinese(16,16,16,"物联网谢林",1);
GUI_ShowString(16,32,"631907090123",16,1);
printf("温度湿度显示");
readinfo(&t1,&t2);
delay_ms(100);
OLED_Clear(0);
GUI_ShowCHinese(0,0,16,"温度:",1);
GUI_ShowNum(42,0,t2/10,2,16,1);
GUI_ShowChar(58,0,'.',16,1);
GUI_ShowNum(74,0,t2%10,1,16,1);
GUI_ShowCHinese(0,16,16,"湿度:",1);
GUI_ShowNum(42,16,t1/10,2,16,1);
GUI_ShowChar(58,16,'.',16,1);
GUI_ShowNum(74,16,t1%10,1,16,1);
delay_ms(1500);
OLED_Clear(0);
roll("欢迎来到物联网实训室");
delay_ms(2500);
delay_ms(2500);
OLED_Clear(0);
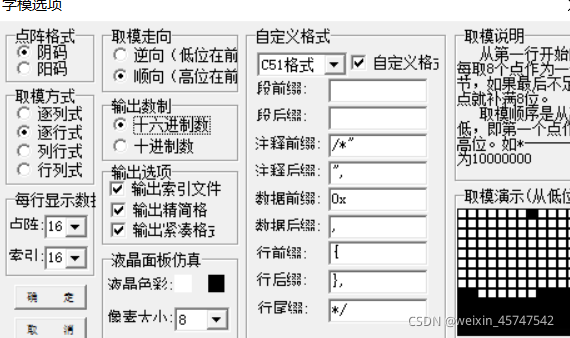
6)添加字模
通过字模生成软件生成字母,相关字摸生成配置如下:
7)测试效果
