С����Ǵ�Һ�,�þò�����RT-Threadʵս�ʼ���,��������һ��MPU6050,������˵,��!
����Դ���ȡ
��ӭ��ĩ���������߹��ںź�̨�ظ���MPU6050�����ɻ�ȡ���̳�Դ��
MPU6050���
ij�����,�Ի�������...
��Ǯ,��������������,�����,�Լ���һ��,�Աȼ۸�,��Ȱ�������,֪���Լ��о�����...
�����÷�:
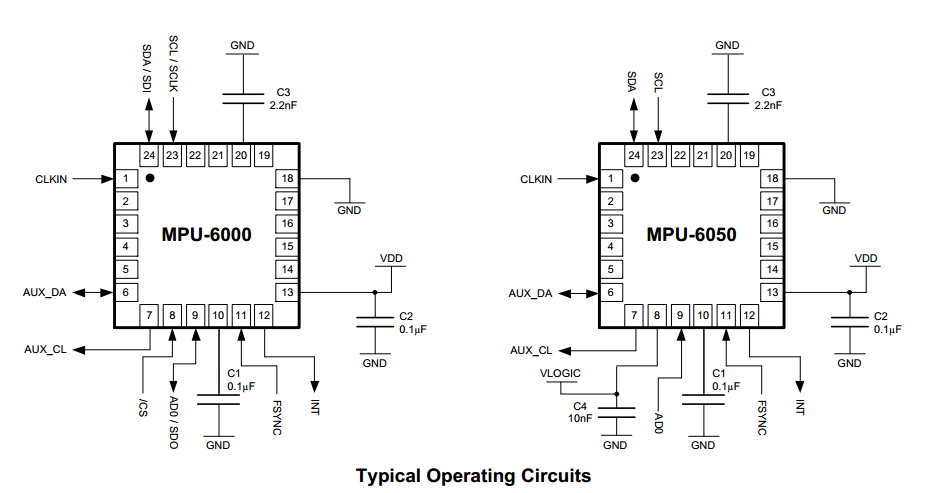
���ڹ����������µ�оƬ�ֲ�ͼĴ���ӳ�������,�ο�:MPU6050 ����

��������:
MPU-60X0�������ϵ�һ��� 6 ��MotionTracking�豸����������3��MEMS������,3��MEMS���ٶȼ�,�Լ�һ������չ�������˶������� DMP( DigitalMotion Processor),����I2C�ӿ�����һ�������������ִ�����,��������ơ���չ֮��Ϳ���ͨ���� I2C��SPI�ӿ����һ��9����ź�( SPI�ӿڽ���MPU-6000����)�� MPU-60X0Ҳ����ͨ����I2C�ӿ����ӷǹ��Ե����ִ�����,����ѹ����������
MPU-60X0�������Ǻͼ��ٶȼƷֱ���������16λ��ADC,���������ģ����ת��Ϊ���������������Ϊ�˾�ȷ���ٿ��ٺ����ٵ��˶�,�������IJ�����Χ�����û��ɿص�,�����ǿɲⷶΧΪ��250, ��500, ��1000, ��2000��/��( dps),���ٶȼƿɲⷶΧΪ��2, ��4,��8, ��16g��
һ��Ƭ��1024�ֽڵ�FIFO,�����ڽ���ϵͳ���ġ��������豸�Ĵ���֮���ͨ�Ų��� 400kHz�� I2C�ӿڻ� 1MHz�� SPI�ӿ�( SPI��MPU-6000����)�� ������Ҫ���ٴ����Ӧ��, �ԼĴ����Ķ�ȡ���жϿ��� 20MHz��SPI������,Ƭ�ϻ���Ƕ��һ���¶ȴ��������ڹ��������½��С�1%�䶯��������оƬ�ߴ�4��4��0.9mm,����QFN��װ(�����߷��η�װ),�ɳ������ 10000g�ij��,���пɱ�̵ĵ�ͨ�˲�����
���ڵ�Դ, MPU-60X0��֧�� VDD��Χ 2.5V��5%, 3.0V��5%,�� 3.3V��5%������MPU-6050����һ�� VLOGIC����,����Ϊ I2C����ṩ����ƽ�� VLOGIC��ѹ��ȡ1.8��5%����VDD��
ϵͳ�ṹͼ:
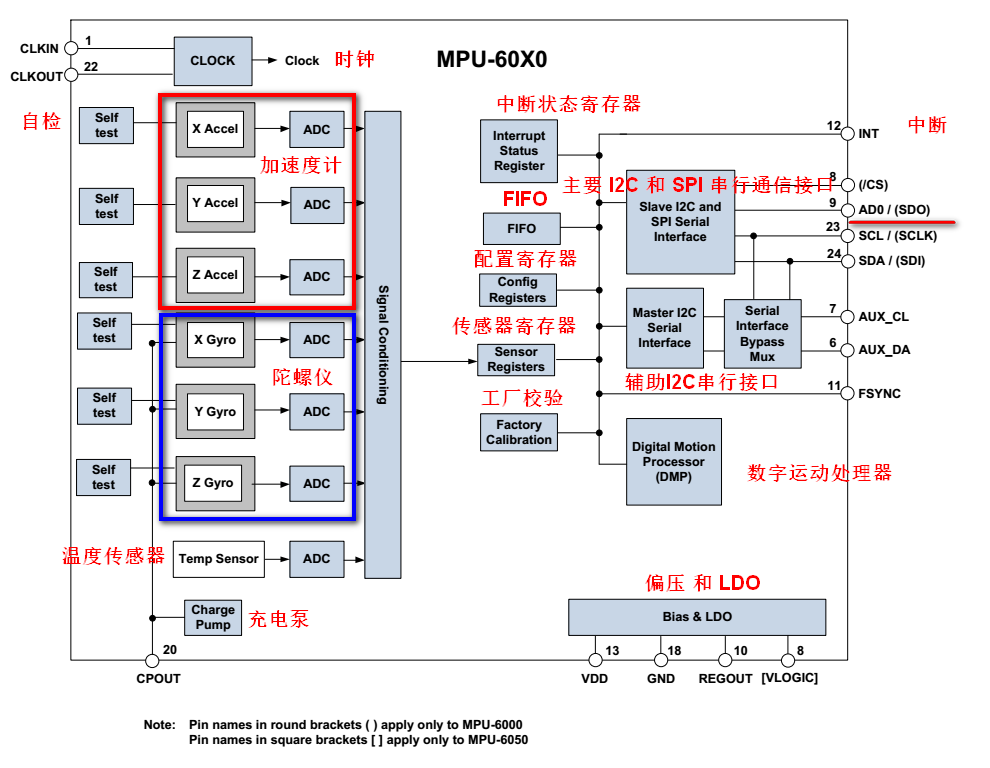
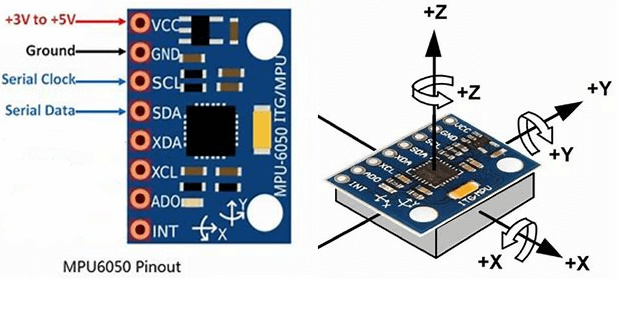
ͨ�Žӿ�:
MPU-60X0ʹ�� SPI(��MPU-6000)�� I2C ����ͨ����ϵͳ�������ӿڡ� ��ϵͳ������ͨ��ʱ,MPU-60X0ʼ�ճ䵱�����豸�� LSB�� I2C �ӵ�ַ�ĵ�ַ������9(AD0)����(һ��ӵ�),���β��õ���IIC��ͨѶ��ʽ,˳��ѧϰһ��rt-thread��IIC�豸������
����,����������������һ������ MEMS �����ǡ�һ������ MEMS ���ٶȼ�,һ�������˶���������(DMP)�����������ڵ����������ִ������ӿڵĸ��� I2C ���нӿ�,���統���� I2C ���нӿ����ӵ�һ�����������,MPU6050 ���ṩһ�������ľ����ں���������� I2C �˿ڡ�
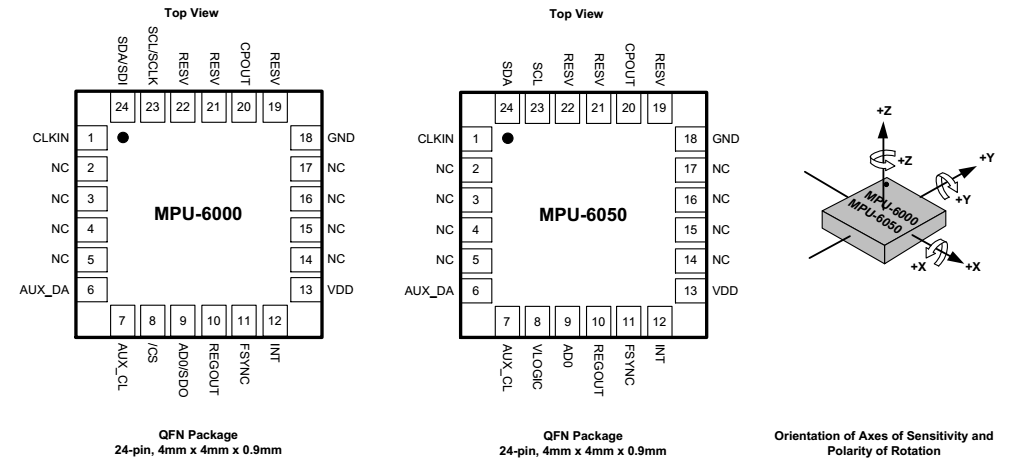
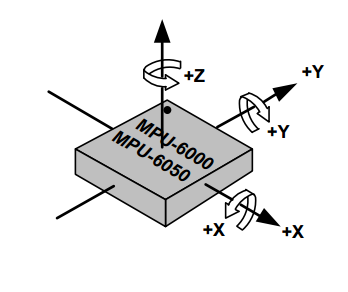
��ͼ�����˴������IJο�����ϵ( XYZ�������ϵ)�Լ� 3�����������ת����
��ת����������������������ж�
�����˶�������(DMP):
DMP����MPU6050�ڲ����˶�����,ȫ��Digital Motion Processor,ֱ�������Ԫ��,���Լ�����Χ�������Ĺ��������ұ����˷������˲��������ںϡ�Motion Driver��Invensense������˶���������������,����ȫ����Դ,���ĵ��㷨���������ARM��������MSP430������������˾�̬���ӿ�,������MPU6050��MPU6500��MPU9150��MPU9250�ȴ�������
FIFO
MPU-60X0����һ����ͨ�����нӿڷ��ʵ�1024�ֽ�FIFO�Ĵ����� FIFO���üĴ��������ĸ�����д��FIFO�� ���ܵ�ѡ���������������,���ټ�����,�¶ȶ���,���������������� FSYNC ���롣 FIFO ���������� FIFO �а�������Ч�����ֽ����� FIFO�Ĵ���֧��ͻ����ȡ�� �жϹ��ܿ�����ȷ�������ݺ�ʱ���á�
MPU6050���漰�Ķ������Ǻܶ��,С�ɸ�Ҳֻ�Ǽ��˽���һЩ,С����ǿ��Բ鿴�ֲ���߰ٶ�,�ܶ�����Ľ���,�Ͳ��ن�����
rt-thread������ʹ��
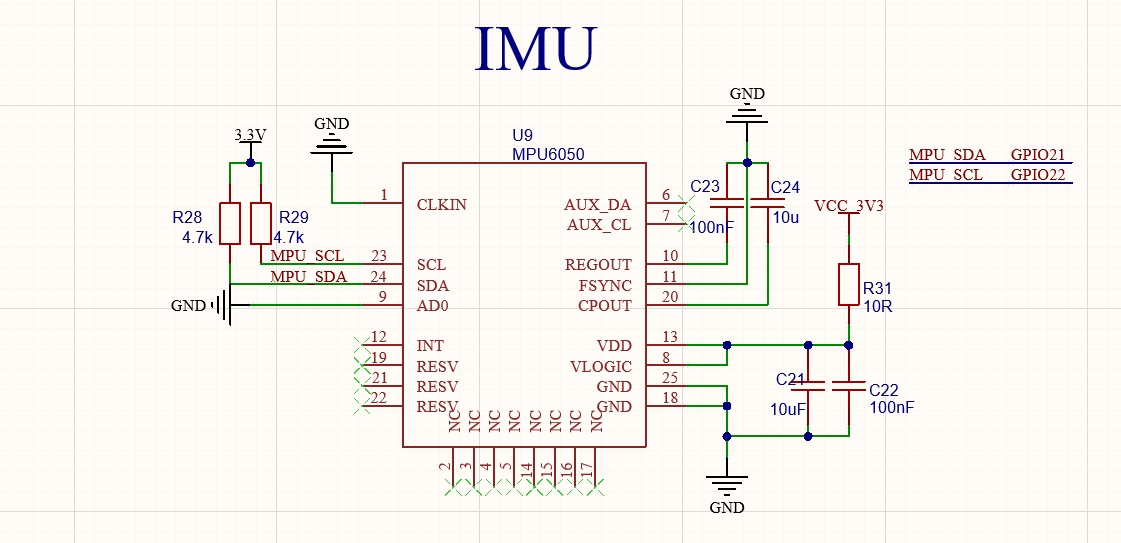
Ӳ������
С�ɸ�ʹ�õ���ART-PI��ART-PI��չ��(12�·ݼ�����Դ����)
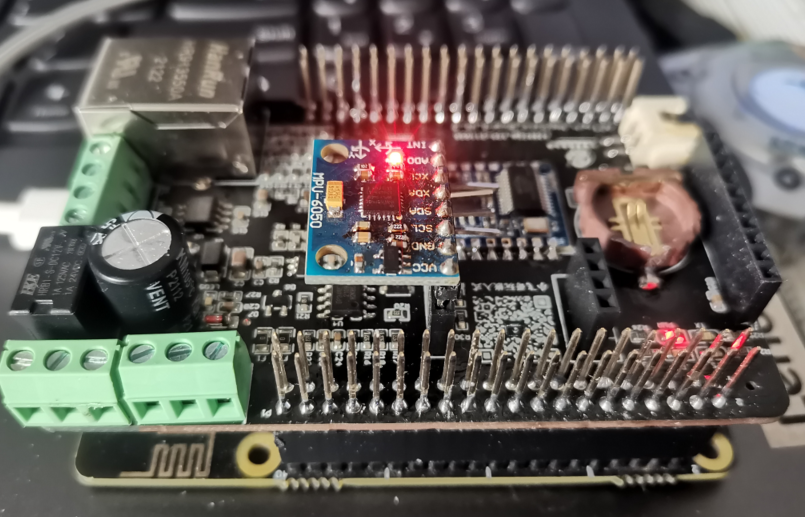
ʹ�õ�������Ϊ:
| MCU | MPU6050 |
|---|---|
| 3.3V | VCC |
| GND | GND |
| PI2 | SDA |
| PI1 | SCL |
С����ǿ��Ի������Լ���MCU��ʹ�õ�������,ģ���IIC,�Լ�����ѡ�Ϳ�����

Ӳ������OK
������д
����2���ַ�ʽ,һ����ʹ��rt-threadƽ̨��������ȡMPU6050������,�Լ�����,��һ�־�����ֲDMP����н���,С�ɸ��õ�����ֲ��DMP��������ġ�
-
rtt������ʹ��
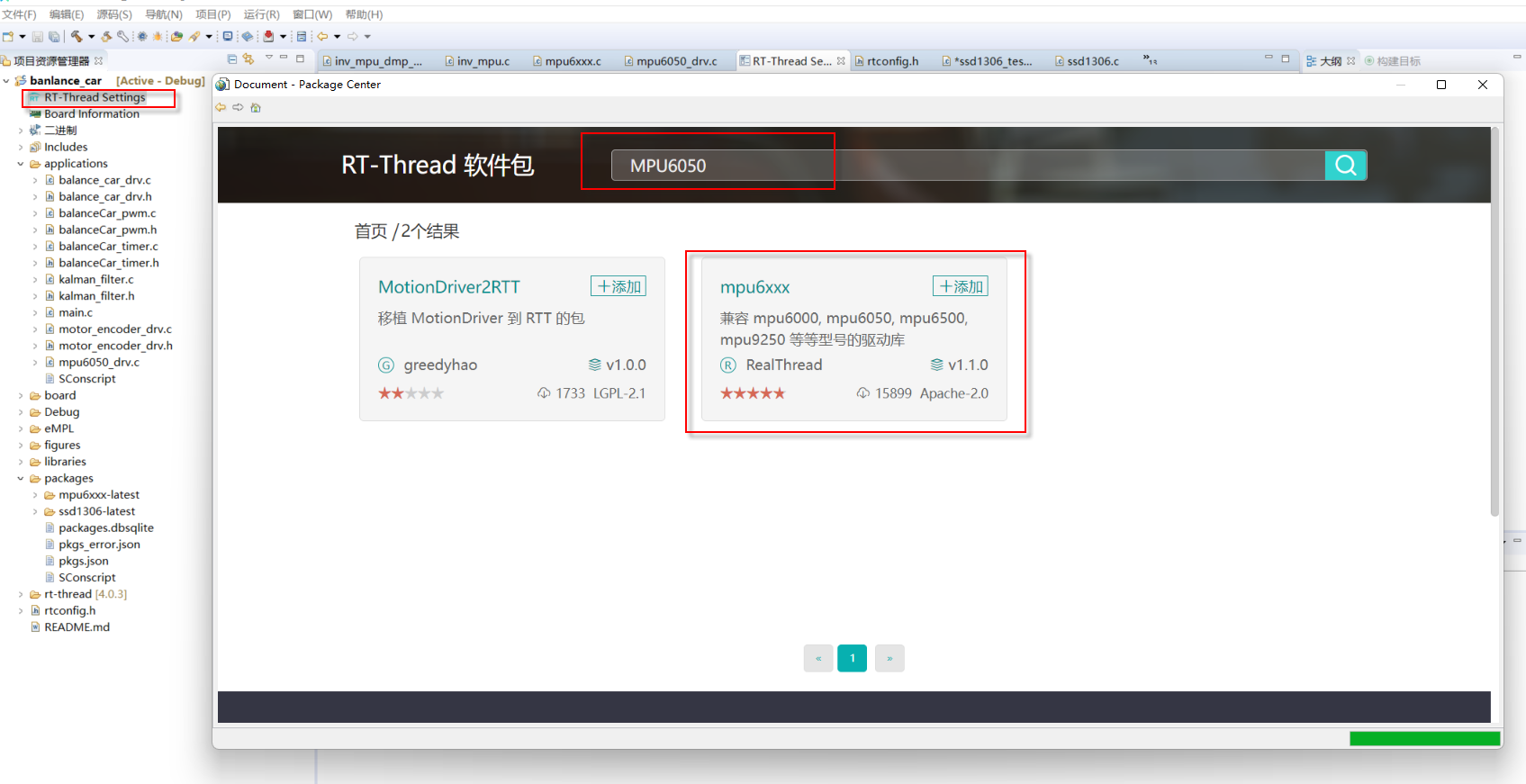
ѡ��MPU6050������
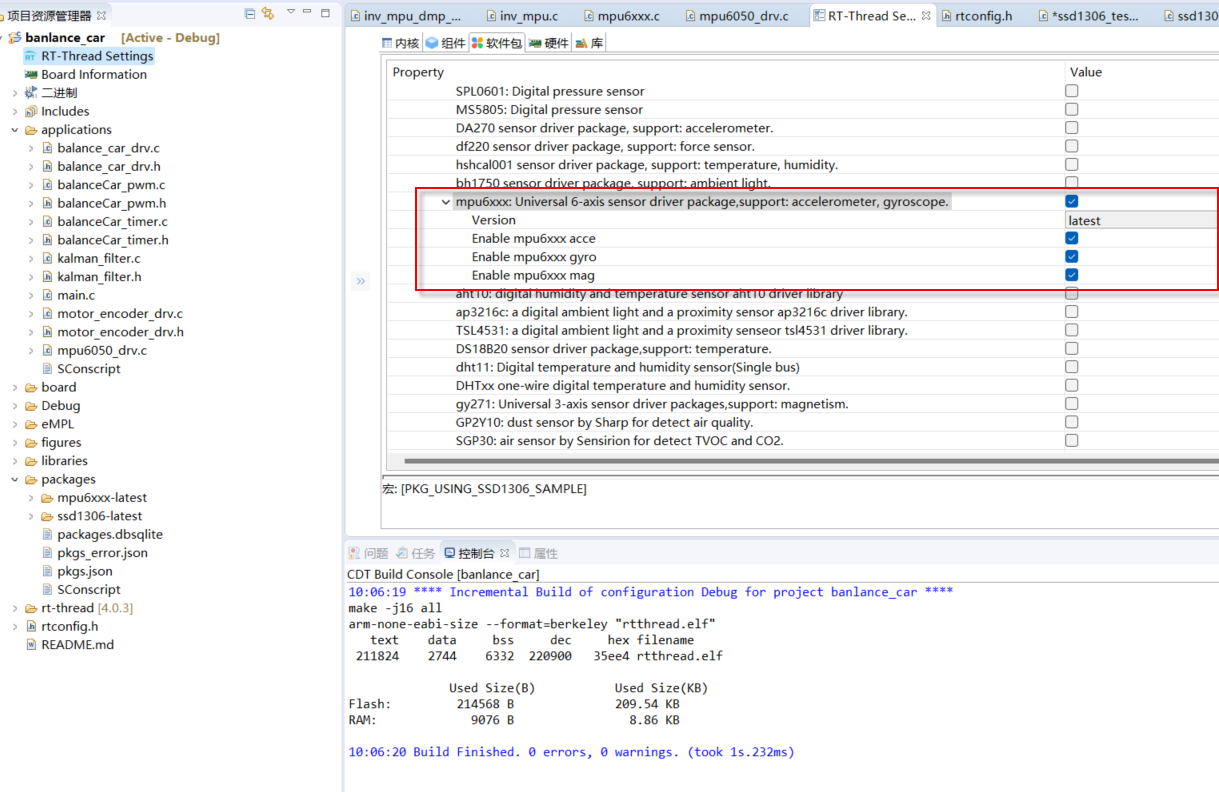
Ȼ��ѡ��ģ��IIC,����ʹ��IIC3,Ҳ����ʹ��������,��������ѡ�õ�ͳһ��OK��
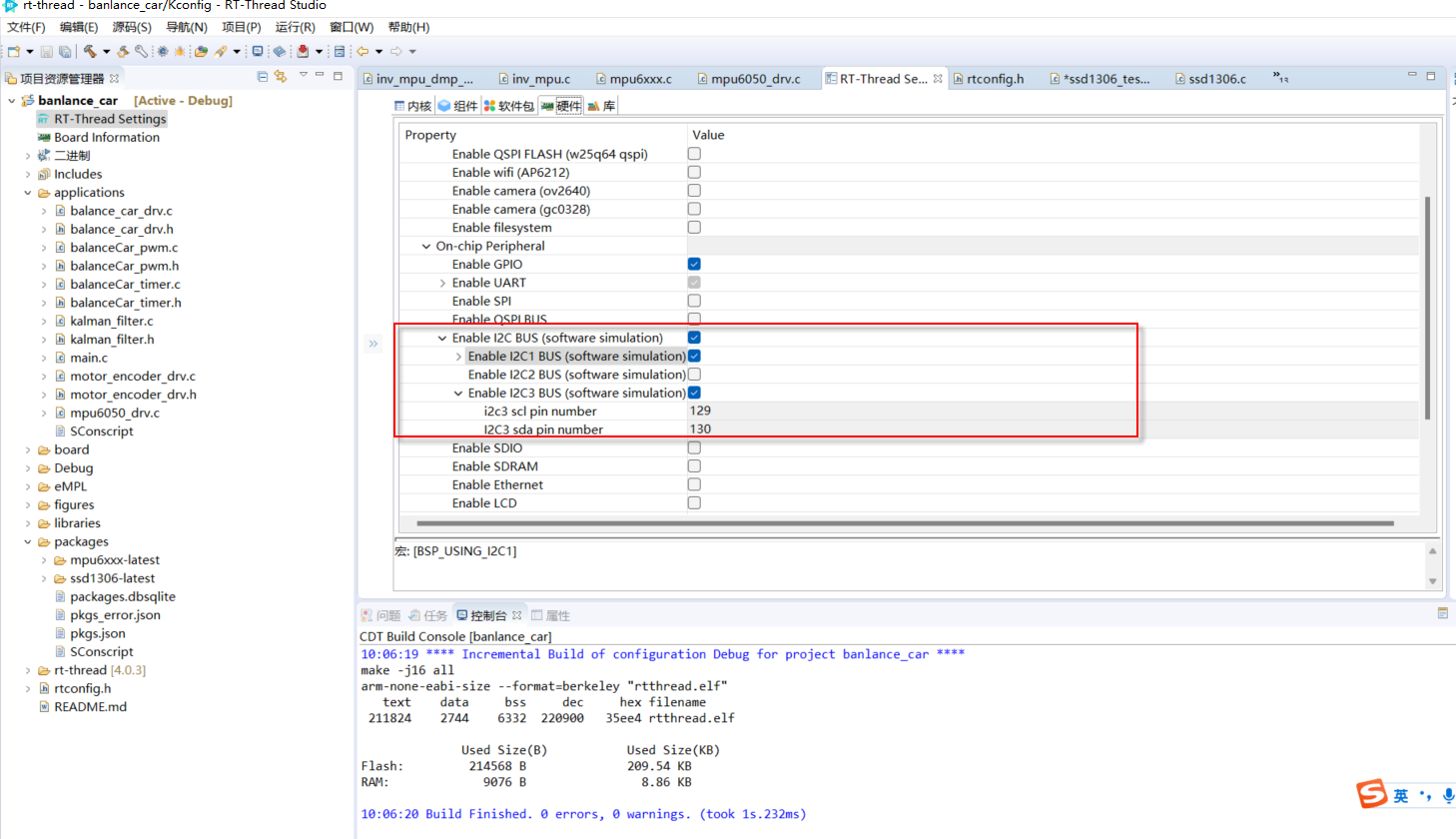
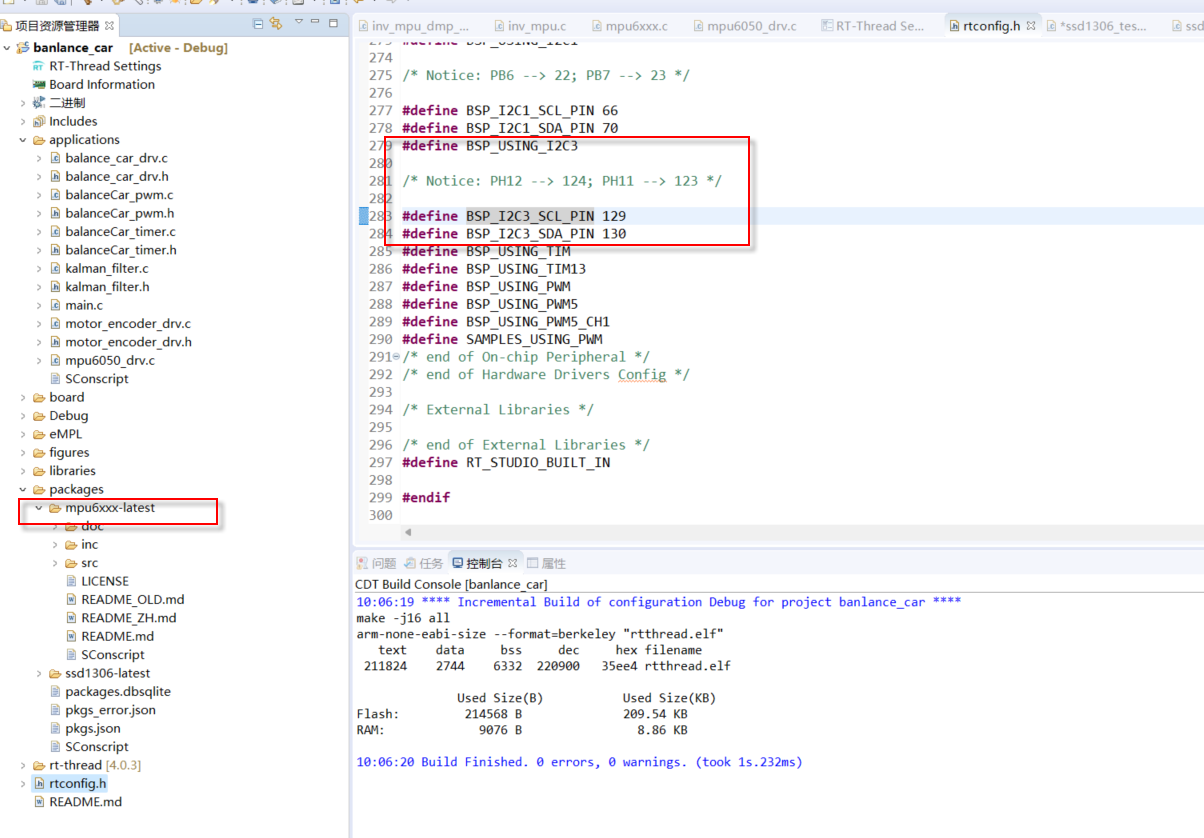
�������֮��,ctrl+S���漴��,�������Զ����������ӽ�����
��������д��ȡ����,ֱ�ӵ����Ѿ���װ�õĽӿڼ���
��ע���豸,��ʼ��
????i2c_bus?=?(struct?mpu6xxx_device?*)mpu6xxx_init(MPU6050_I2C_BUS_NAME,?MPU6050_ADDR);???//��ʼ��MPU6050,������λΪ���ٶ�,���ٶ�????while(count++)
????mpu6xxx_set_param(i2c_bus,?MPU6XXX_ACCEL_RANGE,?MPU6XXX_GYRO_RANGE_2000DPS);??//�����Ƿ�Χ����
????mpu6xxx_set_param(i2c_bus,?MPU6XXX_ACCEL_RANGE,?MPU6XXX_ACCEL_RANGE_2G);?????//���ٶȼ�,һ������Ϊ��2G
????mpu6xxx_set_param(i2c_bus,?MPU6XXX_SAMPLE_RATE,?50);???????????????????????//����Ƶ��
????mpu6xxx_set_param(i2c_bus,?MPU6XXX_DLPF_CONFIG,?25);???????????????????????//���ֵ�ͨ�˲�������,һ��Ϊ1/2������
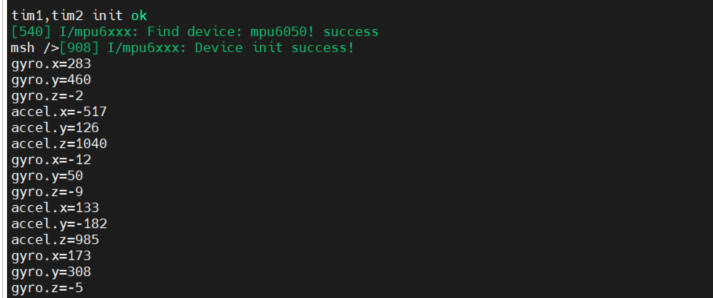
Ȼ����ýӿ�:
??????mpu6xxx_get_gyro(i2c_bus,?&gyro);
??????sprintf(str,"gyro.x=%d\r\n",gyro.x);
??????rt_kprintf(str);
??????sprintf(str,"gyro.y=%d\r\n",gyro.y);
??????rt_kprintf(str);
??????sprintf(str,"gyro.z=%d\r\n",gyro.z);
??????rt_kprintf(str);
??????mpu6xxx_get_accel(i2c_bus,&accel);
??????sprintf(str,"accel.x=%d\r\n",accel.x);
??????rt_kprintf(str);
??????sprintf(str,"accel.y=%d\r\n",accel.y);
??????rt_kprintf(str);
??????sprintf(str,"accel.z=%d\r\n",accel.z);
??????rt_kprintf(str);
����:
����һ��,�������������ڲ���װ:
/**
?*?This?function?gets?the?data?of?the?gyroscope,?unit:?deg/10s
?*?Here?deg/10s?means?10?times?higher?precision?than?deg/s.?
?*
?*?@param?dev?the?pointer?of?device?driver?structure
?*?@param?gyro?the?pointer?of?3axes?structure?for?receive?data
?*
?*?@return?the?reading?status,?RT_EOK?reprensents??reading?the?data?successfully.
?*/
rt_err_t?mpu6xxx_get_gyro(struct?mpu6xxx_device?*dev,?struct?mpu6xxx_3axes?*gyro)
{
????struct?mpu6xxx_3axes?tmp;
????rt_uint16_t?sen;
????rt_err_t?res;
????res?=?mpu6xxx_get_gyro_raw(dev,?&tmp);
????if?(res?!=?RT_EOK)
????{
????????return?res;
????}
????sen?=?MPU6XXX_GYRO_SEN?>>?dev->config.gyro_range;
????gyro->x?=?(rt_int32_t)tmp.x?*?100?/?sen;
????gyro->y?=?(rt_int32_t)tmp.y?*?100?/?sen;
????gyro->z?=?(rt_int32_t)tmp.z?*?100?/?sen;
????return?RT_EOK;
}
/**
?*?This?function?gets?the?data?of?the?accelerometer,?unit:?mg
?*
?*?@param?dev?the?pointer?of?device?driver?structure
?*?@param?accel?the?pointer?of?3axes?structure?for?receive?data
?*
?*?@return?the?reading?status,?RT_EOK?reprensents??reading?the?data?successfully.
?*/
rt_err_t?mpu6xxx_get_accel(struct?mpu6xxx_device?*dev,?struct?mpu6xxx_3axes?*accel)
{
????struct?mpu6xxx_3axes?tmp;
????rt_uint16_t?sen;
????rt_err_t?res;
????res?=?mpu6xxx_get_accel_raw(dev,?&tmp);
????if?(res?!=?RT_EOK)
????{
????????return?res;
????}
????sen?=?MPU6XXX_ACCEL_SEN?>>?dev->config.accel_range;
????accel->x?=?(rt_int32_t)tmp.x?*?1000?/?sen;
????accel->y?=?(rt_int32_t)tmp.y?*?1000?/?sen;
????accel->z?=?(rt_int32_t)tmp.z?*?1000?/?sen;
????return?RT_EOK;
}
���л�ȡ�����ơ��¶ȵĽӿ�,�Ͳ���һһ�о���,�õ����������ǿ��Խ����ֶ����㡣
-
��ֲDMP����
ʹ��DMP���Ļ���rtt��MPU6050����������û�кܴ��ϵ��,ֻ��ҪIIC�ӿھͿ�����
���Ȱ�DMP���ļ��ŵ����ǵĹ�����,����·�������ǵĹ�����
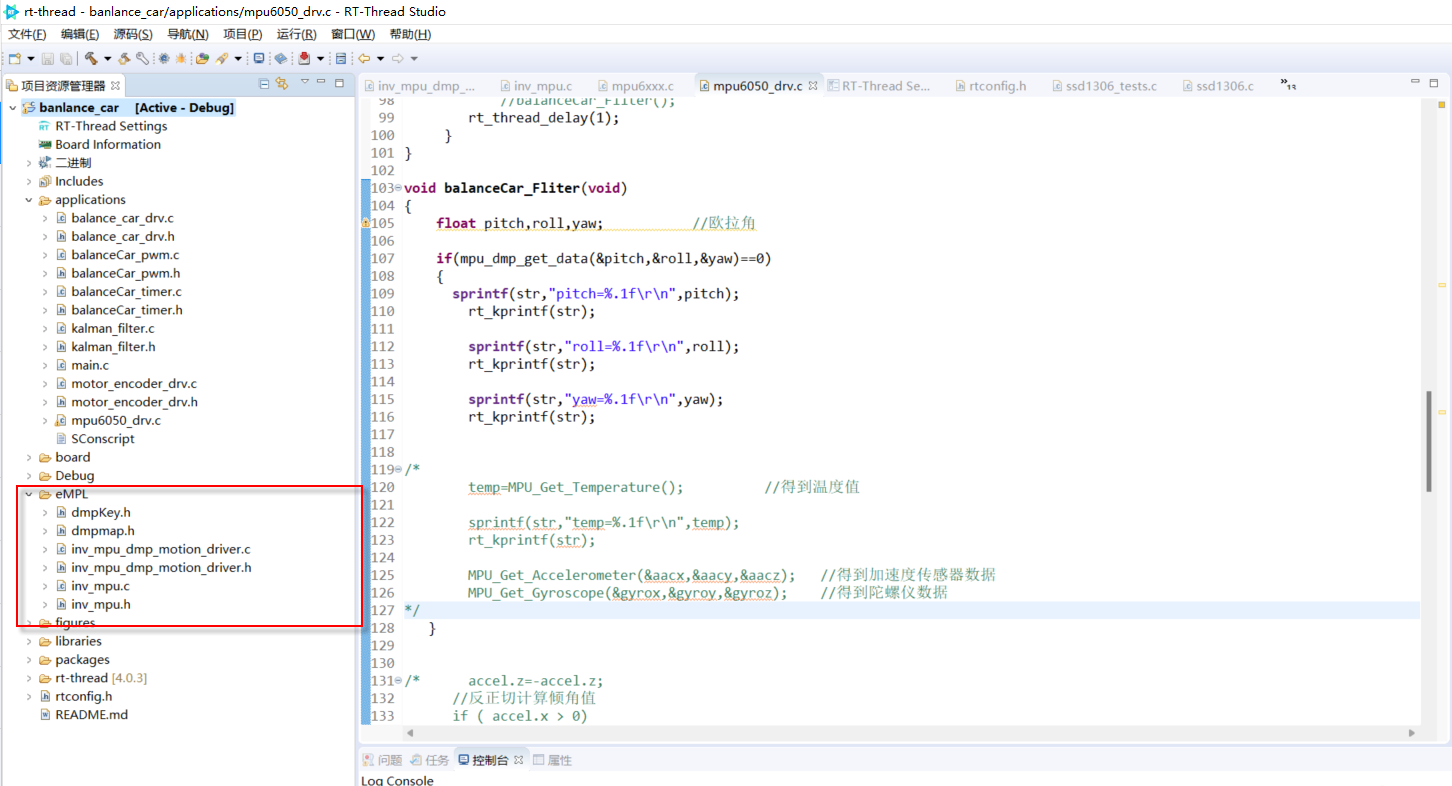
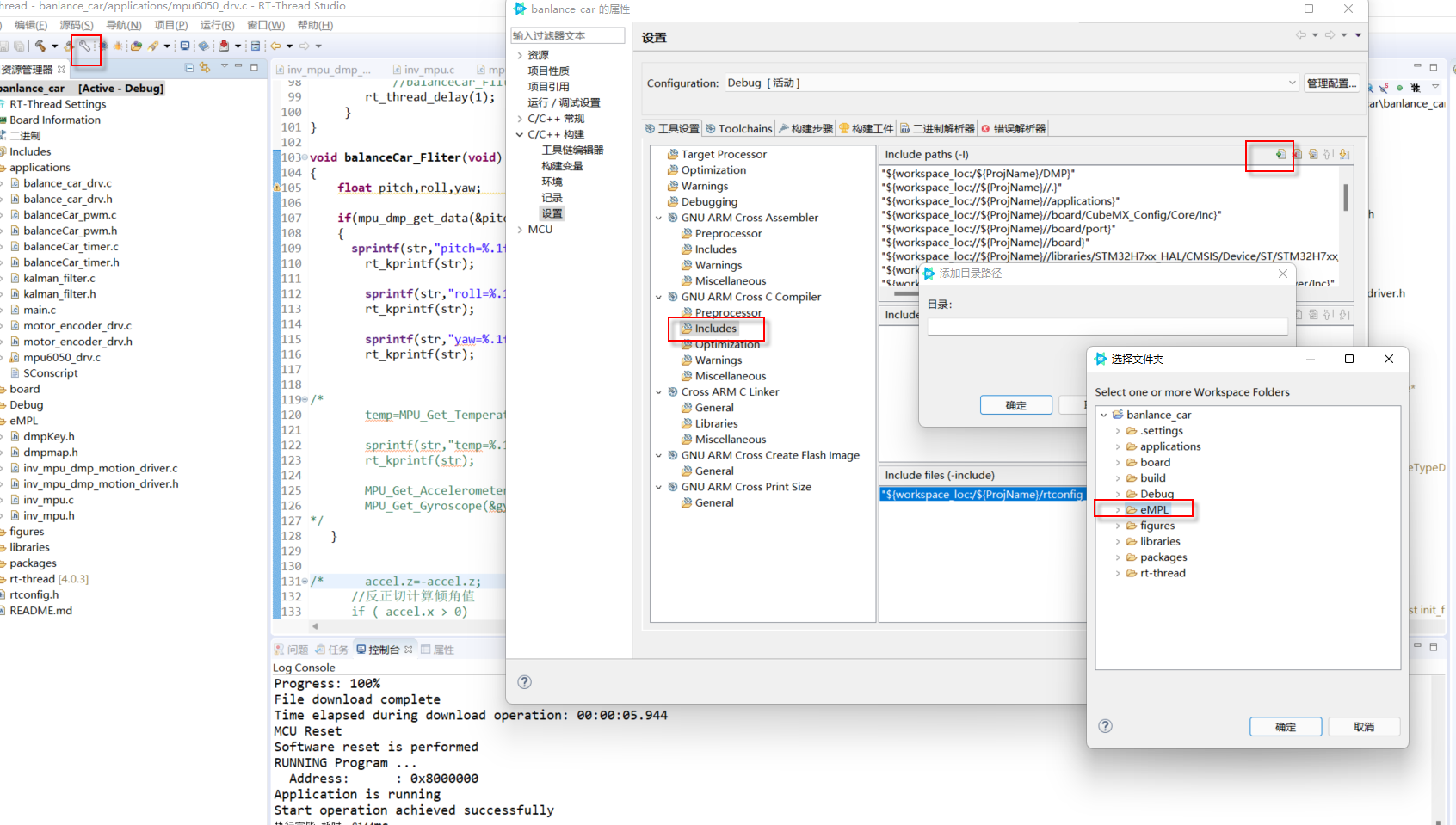
Ȼ�����Ҫ��д��DMP��ԽӵĽӿ���,���漸������Ҫ����ʵ�ֵ�
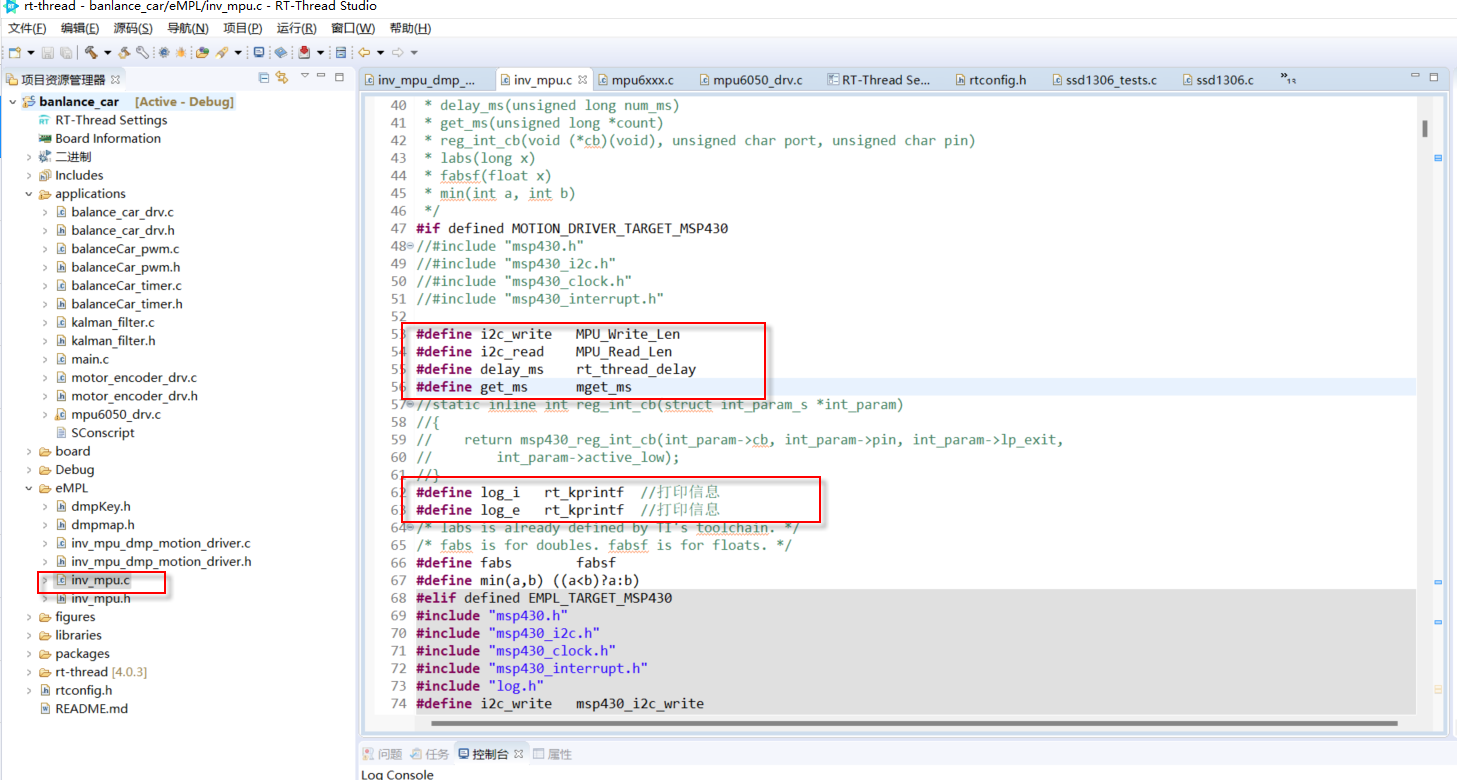
rt_uint8_t?MPU_Write_Len(rt_uint8_t?addr,rt_uint8_t?reg,rt_uint8_t?len,rt_uint8_t?*databuf)
{
????rt_int8_t?res?=?0;
#ifdef?RT_USING_I2C
????struct?rt_i2c_msg?msgs;
????rt_uint8_t?buf[50]?=?{0};
#endif
????buf[0]?=?reg;
????for(int?i?=?0;i<len;i++)
????{
????????buf[i+1]=databuf[i];
????}
????if?(i2c_bus->bus->type?==?RT_Device_Class_I2CBUS)
????{
????????msgs.addr??=?i2c_bus->i2c_addr;????/*?slave?address?*/
????????msgs.flags?=?RT_I2C_WR;????????/*?write?flag?*/
????????msgs.buf???=?buf;??????????????/*?Send?data?pointer?*/
????????msgs.len???=?len+1;
????????if?(rt_i2c_transfer((struct?rt_i2c_bus_device?*)i2c_bus->bus,?&msgs,?1)?==?1)
????????{
????????????res?=?RT_EOK;
????????}
????????else
????????{
????????????res?=?-RT_ERROR;
????????}
????}
}
rt_uint8_t?MPU_Read_Len(rt_uint8_t?addr,rt_uint8_t?reg,rt_uint8_t?len,rt_uint8_t?*buf)
{
????rt_int8_t?res?=?0;
#ifdef?RT_USING_I2C
????struct?rt_i2c_msg?msgs[2];
#endif
#ifdef?RT_USING_SPI
????rt_uint8_t?tmp;
#endif
????if?(i2c_bus->bus->type?==?RT_Device_Class_I2CBUS)
????{
????????msgs[0].addr??=?i2c_bus->i2c_addr;????/*?Slave?address?*/
????????msgs[0].flags?=?RT_I2C_WR;????????/*?Write?flag?*/
????????msgs[0].buf???=?®?????????????/*?Slave?register?address?*/
????????msgs[0].len???=?1;????????????????/*?Number?of?bytes?sent?*/
????????msgs[1].addr??=?i2c_bus->i2c_addr;????/*?Slave?address?*/
????????msgs[1].flags?=?RT_I2C_RD;????????/*?Read?flag?*/
????????msgs[1].buf???=?buf;??????????????/*?Read?data?pointer?*/
????????msgs[1].len???=?len;??????????????/*?Number?of?bytes?read?*/
????????if?(rt_i2c_transfer((struct?rt_i2c_bus_device?*)i2c_bus->bus,?msgs,?2)?==?2)
????????{
????????????res?=?RT_EOK;
????????}
????????else
????????{
????????????res?=?-RT_ERROR;
????????}
????}
????return?res;
}
��ʼ���������Ǹ�Ϊ��������,ֻע��IIC�豸������,������������DMP�����:
????i2c_bus?=?(struct?mpu6xxx_device?*)mpu6xxx_init(MPU6050_I2C_BUS_NAME,?MPU6050_ADDR);???//��ʼ��MPU6050,������λΪ���ٶ�,���ٶ�????while(count++)
/*
????mpu6xxx_set_param(i2c_bus,?MPU6XXX_ACCEL_RANGE,?MPU6XXX_GYRO_RANGE_2000DPS);??//�����Ƿ�Χ����
????mpu6xxx_set_param(i2c_bus,?MPU6XXX_ACCEL_RANGE,?MPU6XXX_ACCEL_RANGE_2G);?????//���ٶȼ�,һ������Ϊ��2G
????mpu6xxx_set_param(i2c_bus,?MPU6XXX_SAMPLE_RATE,?50);???????????????????????//����Ƶ��
????mpu6xxx_set_param(i2c_bus,?MPU6XXX_DLPF_CONFIG,?25);???????????????????????//���ֵ�ͨ�˲�������,һ��Ϊ1/2������
*/
????while(mpu_dmp_init())
????{
????????rt_thread_mdelay(500);
????????rt_kprintf("\r\nMPU6050?Error\r\n");
????}
????rt_kprintf("\r\nMPU6050?OK\r\n");
DMP��ʼ���ɹ�
��ȡ����������:
????float?pitch,roll,yaw;???????????//ŷ����
????if(mpu_dmp_get_data(&pitch,&roll,&yaw)==0)
????{
??????sprintf(str,"pitch=%.1f\r\n",pitch);
????????rt_kprintf(str);
????????sprintf(str,"roll=%.1f\r\n",roll);
????????rt_kprintf(str);
????????sprintf(str,"yaw=%.1f\r\n",yaw);
????????rt_kprintf(str);
/*
????????temp=MPU_Get_Temperature();??????????//�õ��¶�ֵ
????????sprintf(str,"temp=%.1f\r\n",temp);
????????rt_kprintf(str);
????????MPU_Get_Accelerometer(&aacx,&aacy,&aacz);???//�õ����ٶȴ���������
????????MPU_Get_Gyroscope(&gyrox,&gyroy,&gyroz);????//�õ�����������
*/
???}
���˾ͽ�����,ʹ�ÿ�Ľ�����ͦ�����,�Լ����������漰�ļ��㻹��ͦ�鷳��,���¾Ͳ��ٽ�����,��ӭ������С���Ͷ�����Ŷ
���ϻ�ȡ
��ӭ����С�ɸ����,һ���������뾭��,�ظ���Ⱥ���ɼ��롰�����������ߡ�Ⱥ
