目录
?
一.相关协议
1 关于I2C协议
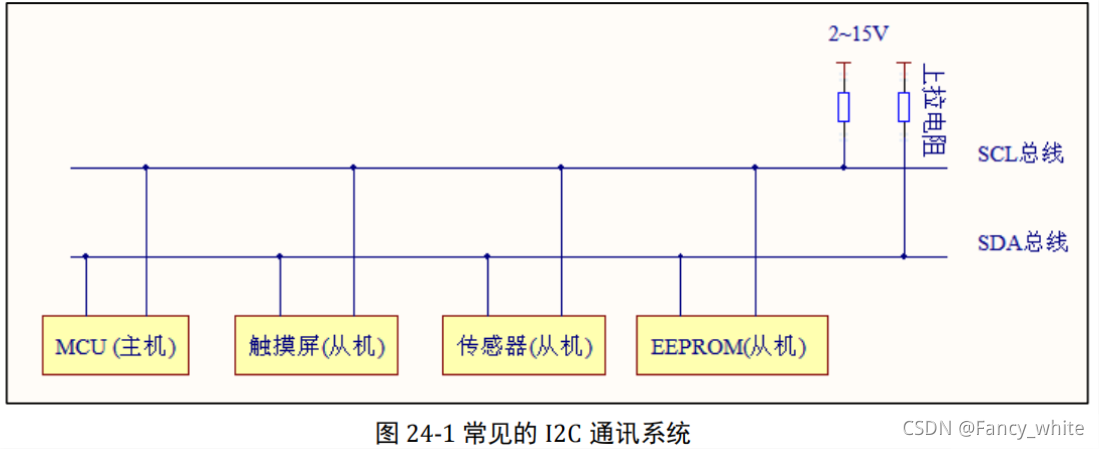
????????I2C 通讯协议 (Inter - Integrated Circuit) 是由 Phiilps 公司开发的,由于它引脚少,硬件实
现简单,可扩展性强,不需要 USART 、 CAN 等通讯协议的外部收发设备,现在被广泛地
使用在系统内多个集成电路 (IC) 间的通讯。
物理层
??协议层
??主要是定义了通讯的起始和停止信号、数据有效性、响应、仲裁、时钟同步和地址广播等。
当 SCL 线是高电平时 SDA 线从高电平向低电平切换,这个情况表示通讯的起始。
当 SCL 是高电平时 SDA线由低电平向高电平切换,表示通讯的停止。

?可以看出I2C在通讯的时候,只有在SCL处于高电平时,SDA的数据传输才是有效的。SDA 信号线是用于传输数据,SCL 信号线是保证数据同步。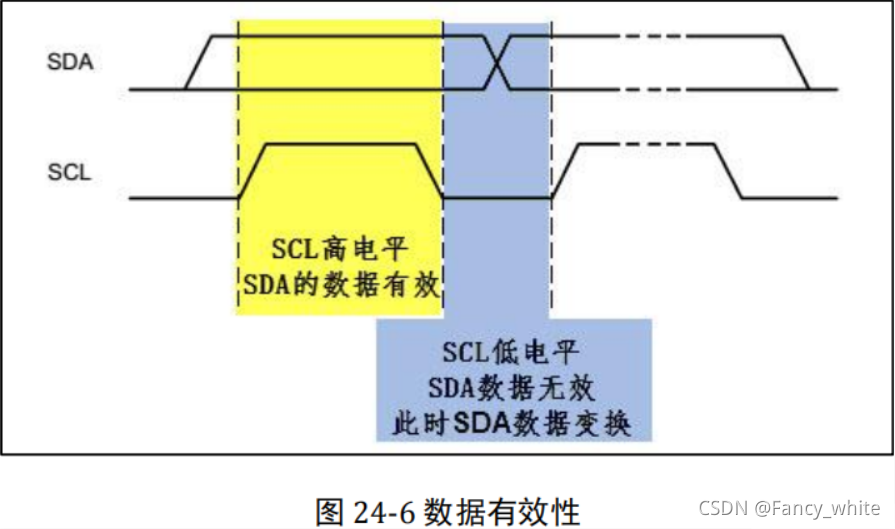
?当SDA传输数据后,接收方对接受到的数据进行一个应答。如果希望继续进行传输数据,则回应应答信号(低电平),否则回应非应答信号(高电平)

软件I2C和硬件I2C
①硬件I2C
直接利用 STM32 芯片中的硬件 I2C 外设。
只要配置好对应的寄存器,外设就会产生标准串口协议的时序。在初始化好 I2C 外设后,只需要把某寄存器位置 1,此时外设就会控制对应的 SCL 及 SDA 线自动产生 I2C 起始信号,不需要内核直接控制引脚的电平。
②软件I2C
直接使用 CPU 内核按照 I2C 协议的要求控制 GPIO 输出高低电平,从而模拟I2C。
????????需要在控制产生 I2C 的起始信号时,控制作为 SCL 线的 GPIO 引脚输出高电平,然后控制作为 SDA 线的 GPIO 引脚在此期间完成由高电平至低电平的切换,最后再控制SCL 线切换为低电平,这样就输出了一个标准的 I2C 起始信号。
③两者的差别
????????硬件 I2C 直接使用外设来控制引脚,可以减轻 CPU 的负担。不过使用硬件I2C 时必须使用某些固定的引脚作为 SCL 和 SDA,软件模拟 I2C 则可以使用任意 GPIO 引脚,相对比较灵活。对于硬件I2C用法比较复杂,软件I2C的流程更清楚一些。如果要详细了解I2C的协议,使用软件I2C可能更好的理解这个过程。在使用I2C过程,硬件I2C可能通信更加快,更加稳定。
2 关于SPI协议???
SPI 协议是由摩托罗拉公司提出的通讯协议 (Serial Peripheral Interface) ,即串行外围设
备接口,是一种高速全双工的通信总线。它被广泛地使用在 ADC 、 LCD 等设备与 MCU 间,
要求通讯速率较高的场合。
SPI物理层?
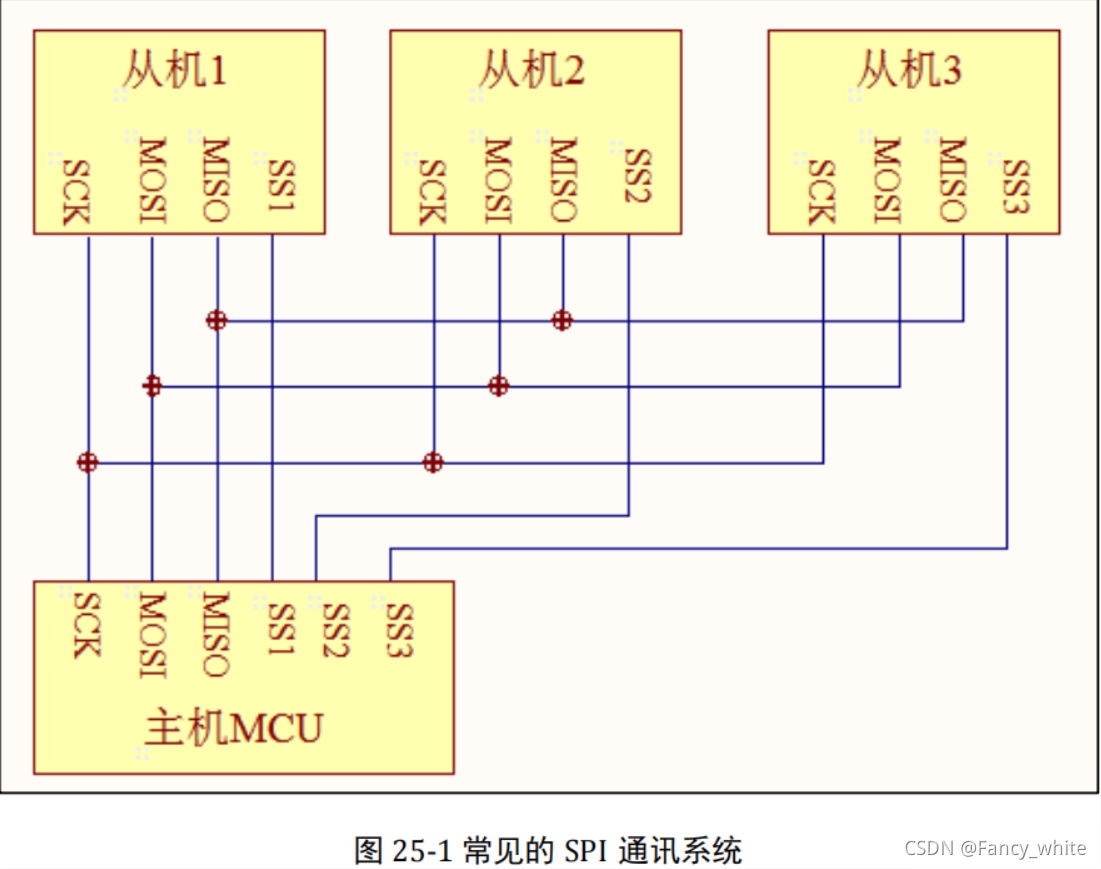
SS( Slave Select):从设备选择信号线,常称为片选信号线。
SCK (Serial Clock):时钟信号线,用于通讯数据同步。
MOSI (Master Output, Slave Input):主设备输出/从设备输入引脚。
MISO(Master Input,,Slave Output):主设备输入/从设备输出引脚。
?SPI协议层
?SPI 基本通讯过程?

?MOSI 与 MISO 的信号只在 NSS 为低电平的时候才有效,在 SCK 的每个时钟周期 MOSI 和 MISO 传输一位数据。?
通讯的起始和停止信号
? 在图 25-2 中的标号① 处, NSS 信号线由高变低,是 SPI 通讯的起始信号。 NSS 是每个
从机各自独占的信号线,当从机在自己的 NSS 线检测到起始信号后,就知道自己被主机选
中了,开始准备与主机通讯。在图中的标号⑥ 处, NSS 信号由低变高,是 SPI 通讯的停止
信号,表示本次通讯结束,从机的选中状态被取消。
数据有效性
SPI 使用 MOSI 及 MISO 信号线来传输数据,使用 SCK 信号线进行数据同步。 MOSI 及
MISO 数据线在 SCK 的每个时钟周期传输一位数据,且数据输入输出是同时进行的。数据
传输时, MSB 先行或 LSB 先行并没有作硬性规定,但要保证两个 SPI 通讯设备之间使用同
样的协定,一般都会采用图 25-2 中的 MSB 先行模式。
CPOL/CPHA 及通讯模式
?
3 了解AHT20芯片的相关信息
具体信息请到官方下载对应产品介绍文档
4 OLED屏的滚屏命令
水平左右移
OLED_WR_Byte(0x2E,OLED_CMD); //关闭滚动
OLED_WR_Byte(0x26,OLED_CMD); //水平向左或者右滚动 26/27
OLED_WR_Byte(0x00,OLED_CMD); //虚拟字节
OLED_WR_Byte(0x00,OLED_CMD); //起始页 0
OLED_WR_Byte(0x07,OLED_CMD); //滚动时间间隔
OLED_WR_Byte(0x07,OLED_CMD); //终止页 7
OLED_WR_Byte(0x00,OLED_CMD); //虚拟字节
OLED_WR_Byte(0xFF,OLED_CMD); //虚拟字节
OLED_WR_Byte(0x2F,OLED_CMD); //开启滚动垂直和水平滚动
OLED_WR_Byte(0x2e,OLED_CMD); //关闭滚动
OLED_WR_Byte(0x29,OLED_CMD); //水平垂直和水平滚动左右 29/2a
OLED_WR_Byte(0x00,OLED_CMD); //虚拟字节
OLED_WR_Byte(0x00,OLED_CMD); //起始页 0
OLED_WR_Byte(0x07,OLED_CMD); //滚动时间间隔
OLED_WR_Byte(0x07,OLED_CMD); //终止页 1
OLED_WR_Byte(0x01,OLED_CMD); //垂直滚动偏移量
OLED_WR_Byte(0x2F,OLED_CMD); //开启滚动?本OLED屏的芯片类型:SSD1306
详细命令的介绍,请查找SSD1306-OLED驱动中文手册进行了解
5 AHT20引脚接法
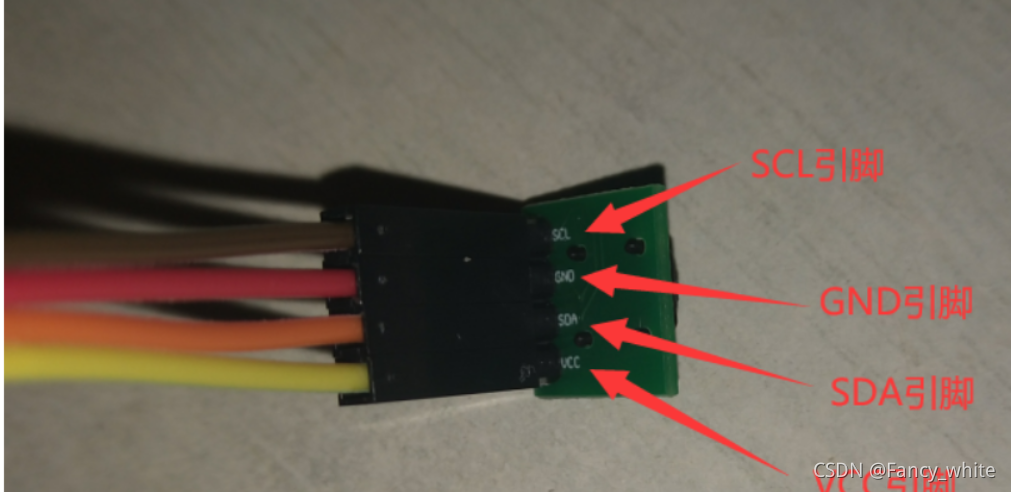
SCL-->PB6? ? ??SDA-->PB7?
本文代码主要使用PB6,PB7引脚,如果需要使用其它引脚可自行修改。
1.6 OLED引脚接法

二、采集温度传到电脑
1 完整代码
主要的代码
main.c
#include "stm32f10x.h"
#include "usart.h"
#include "delay.h"
#include "bsp_i2c.h"
int main(void)
{
//延时初始化
delay_init();
//串口初始化
uart_init(115200);
//
IIC_Init();
while(1)
{
read_AHT20_once();
delay_ms(1500);
}
}
/*********************************************END OF FILE**********************/bsp_i2c.c
#include "bsp_i2c.h"
#include "delay.h"
#include "string.h"
uint8_t ack_status=0;
uint8_t readByte[6];
uint32_t H1=0; //Humility
uint32_t T1=0; //Temperature
uint8_t AHT20_OutData[4];
/****************
*初始化 I2C 函数
****************/
void IIC_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
//启用高速 APB (APB2) 外围时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE );
//GPIO 定义
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//初始化 SCL(Pin6)高电平
IIC_SCL=1;
//初始化 SDA(Pin7)高电平
IIC_SDA=1;
}
/*********************
*AHT20 数据操作总函数
*********************/
void read_AHT20_once(void)
{
printf("读取数据中");
//延时 10 微妙
delay_ms(10);
//传输数据前进行启动传感器和软复位
reset_AHT20();
delay_ms(10);
//查看使能位
init_AHT20();
delay_ms(10);
//触发测量
startMeasure_AHT20();
delay_ms(80);
//读数据
read_AHT20();
delay_ms(5);
}
void reset_AHT20(void)
{
//数据传输开始信号
I2C_Start();
//发送数据
I2C_WriteByte(0x70);
//接收 ACK 信号
ack_status = Receive_ACK();
//判断 ACK 信号
if(ack_status)
{
printf(">");
}
else
printf("×");
//发送软复位命令(重启传感器系统)
I2C_WriteByte(0xBA);
//接收 ACK 信号
ack_status = Receive_ACK();
//判断 ACK 信号
if(ack_status)
printf(">");
else
printf("×");
//停止 I2C 协议
I2C_Stop();
}
//0x70 ―> 0111 0000 前七位表示 I2C 地址,第八位为0,表示 write
//0xE1 ―> 看状态字的校准使能位Bit[3]是否为 1
//0x08 0x00 ―> 0xBE 命令的两个参数,详见 AHT20 参考手册
void init_AHT20(void)
{
//传输开始
I2C_Start();
//写入 0x70 数据
I2C_WriteByte(0x70);
//接收 ACK 信号
ack_status = Receive_ACK();
//判断 ACK 信号
if(ack_status)
printf(">");
else
printf("×");
//写入 0xE1 数据
I2C_WriteByte(0xE1);
ack_status = Receive_ACK();
if(ack_status)
printf(">");
else
printf("×");
//写入 0x08 数据
I2C_WriteByte(0x08);
ack_status = Receive_ACK();
if(ack_status)
printf(">");
else
printf("×");
//写入 0x00 数据
I2C_WriteByte(0x00);
ack_status = Receive_ACK();
if(ack_status)
printf(">");
else
printf("×");
//停止 I2C 协议
I2C_Stop();
}
//0x70 ―> 0111 0000 前七位表示 I2C 地址,第八位为0,表示 write
//0xAC ―> 触发测量
//0x33 0x00 ―> 0xAC 命令的两个参数,详见 AHT20 参考手册
void startMeasure_AHT20(void)
{
//启动 I2C 协议
I2C_Start();
I2C_WriteByte(0x70);
ack_status = Receive_ACK();
if(ack_status)
printf(">");
else
printf("×");
I2C_WriteByte(0xAC);
ack_status = Receive_ACK();
if(ack_status)
printf(">");
else
printf("×");
I2C_WriteByte(0x33);
ack_status = Receive_ACK();
if(ack_status)
printf(">");
else
printf("×");
I2C_WriteByte(0x00);
ack_status = Receive_ACK();
if(ack_status)
printf(">");
else
printf("×");
I2C_Stop();
}
void read_AHT20(void)
{
uint8_t i;
//初始化 readByte 数组
for(i=0; i<6; i++)
{
readByte[i]=0;
}
I2C_Start();
//通过发送 0x71 可以获取一个字节的状态字
I2C_WriteByte(0x71);
ack_status = Receive_ACK();
//接收 6 个 8 bit的数据
readByte[0]= I2C_ReadByte();
//发送 ACK 信号
Send_ACK();
readByte[1]= I2C_ReadByte();
Send_ACK();
readByte[2]= I2C_ReadByte();
Send_ACK();
readByte[3]= I2C_ReadByte();
Send_ACK();
readByte[4]= I2C_ReadByte();
Send_ACK();
readByte[5]= I2C_ReadByte();
//发送 NACK 信号
SendNot_Ack();
I2C_Stop();
//温湿度的二进制数据处理
//0x68 = 0110 1000
//0x08 = 0000 1000
if( (readByte[0] & 0x68) == 0x08 )
{
H1 = readByte[1];
//H1 左移 8 位并与 readByte[2] 相或
H1 = (H1<<8) | readByte[2];
H1 = (H1<<8) | readByte[3];
//H1 右移 4 位
H1 = H1>>4;
H1 = (H1*1000)/1024/1024;
T1 = readByte[3];
//与运算
T1 = T1 & 0x0000000F;
T1 = (T1<<8) | readByte[4];
T1 = (T1<<8) | readByte[5];
T1 = (T1*2000)/1024/1024 - 500;
AHT20_OutData[0] = (H1>>8) & 0x000000FF;
AHT20_OutData[1] = H1 & 0x000000FF;
AHT20_OutData[2] = (T1>>8) & 0x000000FF;
AHT20_OutData[3] = T1 & 0x000000FF;
}
else
{
AHT20_OutData[0] = 0xFF;
AHT20_OutData[1] = 0xFF;
AHT20_OutData[2] = 0xFF;
AHT20_OutData[3] = 0xFF;
printf("꧰üá?");
}
printf("完成!\n");
printf("----温度:%d%d.%d °C\n",T1/100,(T1/10)%10,T1%10);
printf("----湿度:%d%d.%d %%",H1/100,(H1/10)%10,H1%10);
printf("\n\n");
}
//接收 ACK 信号
uint8_t Receive_ACK(void)
{
uint8_t result=0;
uint8_t cnt=0;
//置 SCL 低电平
IIC_SCL = 0;
//设置 SDA 为读取数据模式
SDA_IN();
delay_us(4);
//置 SCL 高电平
IIC_SCL = 1;
delay_us(4);
//等待从机发送 ACK 信号,等待时间为 100 个循环
while(READ_SDA && (cnt<100))
{
cnt++;
}
IIC_SCL = 0;
delay_us(4);
//如果在等待时间内,则结果为 1
if(cnt<100)
{
result=1;
}
return result;
}
//发送 ACK 信号
void Send_ACK(void)
{
//设置 SDA 为写数据模式
SDA_OUT();
IIC_SCL = 0;
delay_us(4);
//置 SDA 为低电平
IIC_SDA = 0;
delay_us(4);
IIC_SCL = 1;
delay_us(4);
IIC_SCL = 0;
delay_us(4);
SDA_IN();
}
//发送 NACK 信号
void SendNot_Ack(void)
{
//设置 SDA 为写数据模式
SDA_OUT();
IIC_SCL = 0;
delay_us(4);
IIC_SDA = 1;
delay_us(4);
IIC_SCL = 1;
delay_us(4);
IIC_SCL = 0;
delay_us(4);
IIC_SDA = 0;
delay_us(4);
}
//发送一个字节数据
void I2C_WriteByte(uint8_t input)
{
uint8_t i;
//设置 SDA 为写数据模式
SDA_OUT();
//循环左移发送 8 bit数据
for(i=0; i<8; i++)
{
IIC_SCL = 0;
delay_ms(5);
if(input & 0x80)
{
IIC_SDA = 1;
}
else
{
IIC_SDA = 0;
}
IIC_SCL = 1;
delay_ms(5);
input = (input<<1);
}
IIC_SCL = 0;
delay_us(4);
SDA_IN();
delay_us(4);
}
//循环检测 SDA 的电平状态并存储起来
uint8_t I2C_ReadByte(void)
{
uint8_t resultByte=0;
uint8_t i=0, a=0;
IIC_SCL = 0;
SDA_IN();
delay_ms(4);
//循环检测
for(i=0; i<8; i++)
{
IIC_SCL = 1;
delay_ms(3);
a=0;
if(READ_SDA)
{
a=1;
}
else
{
a=0;
}
resultByte = (resultByte << 1) | a;
IIC_SCL = 0;
delay_ms(3);
}
SDA_IN();
delay_ms(10);
return resultByte;
}
//设置 I2C 协议开始
void I2C_Start(void)
{
SDA_OUT();
IIC_SCL = 1;
delay_ms(4);
//SDA 从 1 跳变为 0 的这个过程
//表示起始信号
IIC_SDA = 1;
delay_ms(4);
IIC_SDA = 0;
delay_ms(4);
//SCL 变为 0
//表示 SDA 数据无效,此时 SDA 可以进行电平切换
IIC_SCL = 0;
delay_ms(4);
}
//设置 I2C 协议停止
void I2C_Stop(void)
{
SDA_OUT();
//SCL 高电平,SDA 高电平
//停止时序
IIC_SDA = 0;
delay_ms(4);
IIC_SCL = 1;
delay_ms(4);
//SDA 切换到高电平
IIC_SDA = 1;
delay_ms(4);
}2 打开工程文件

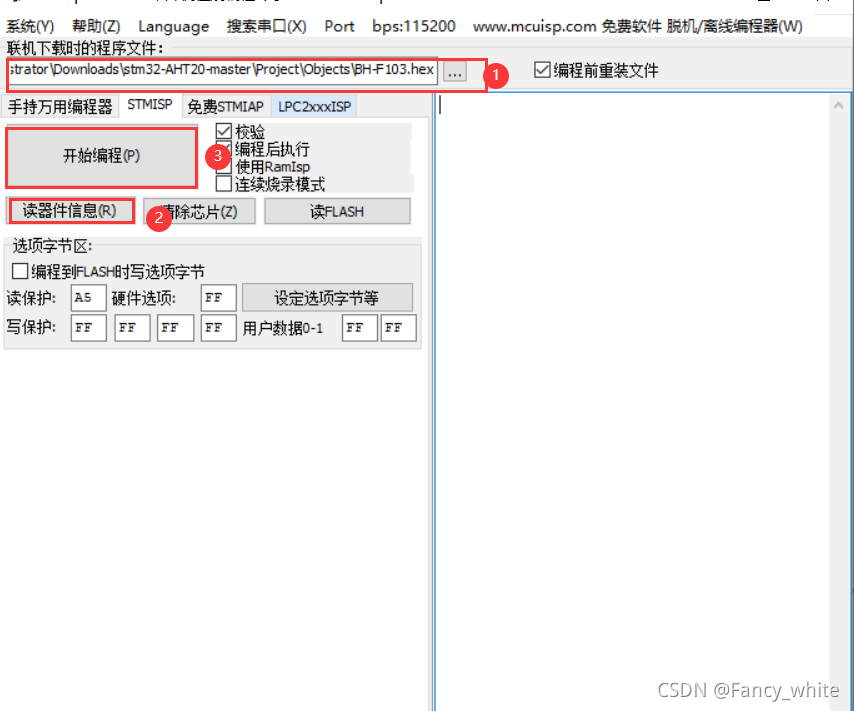
3 编译加烧录
在该文件下找到对应的hex文件进行烧录
文件烧录?
4 结果

三、基于SPI的OLED显示
1修改代码
修改test.c中的TEST_MainPage函数中GUI_ShowString,GUI_ShowCHinese的参数

?2汉字取模点阵软件
?使用汉字取模点阵软件将自己需要的字

?需要将设置点阵的取模走向改为顺向,方式改为逐行?
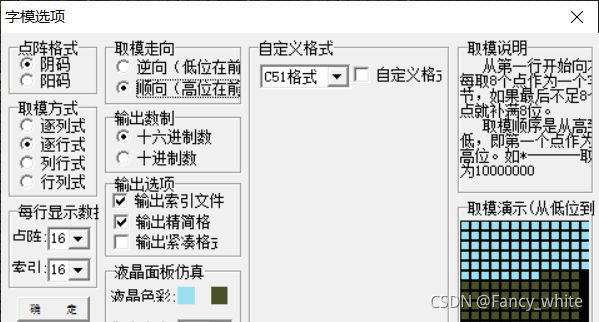
然后将对应的字模点阵加入到oledfont.h里?

3烧录
烧录跟上面的文件一样的操作方式
4结果
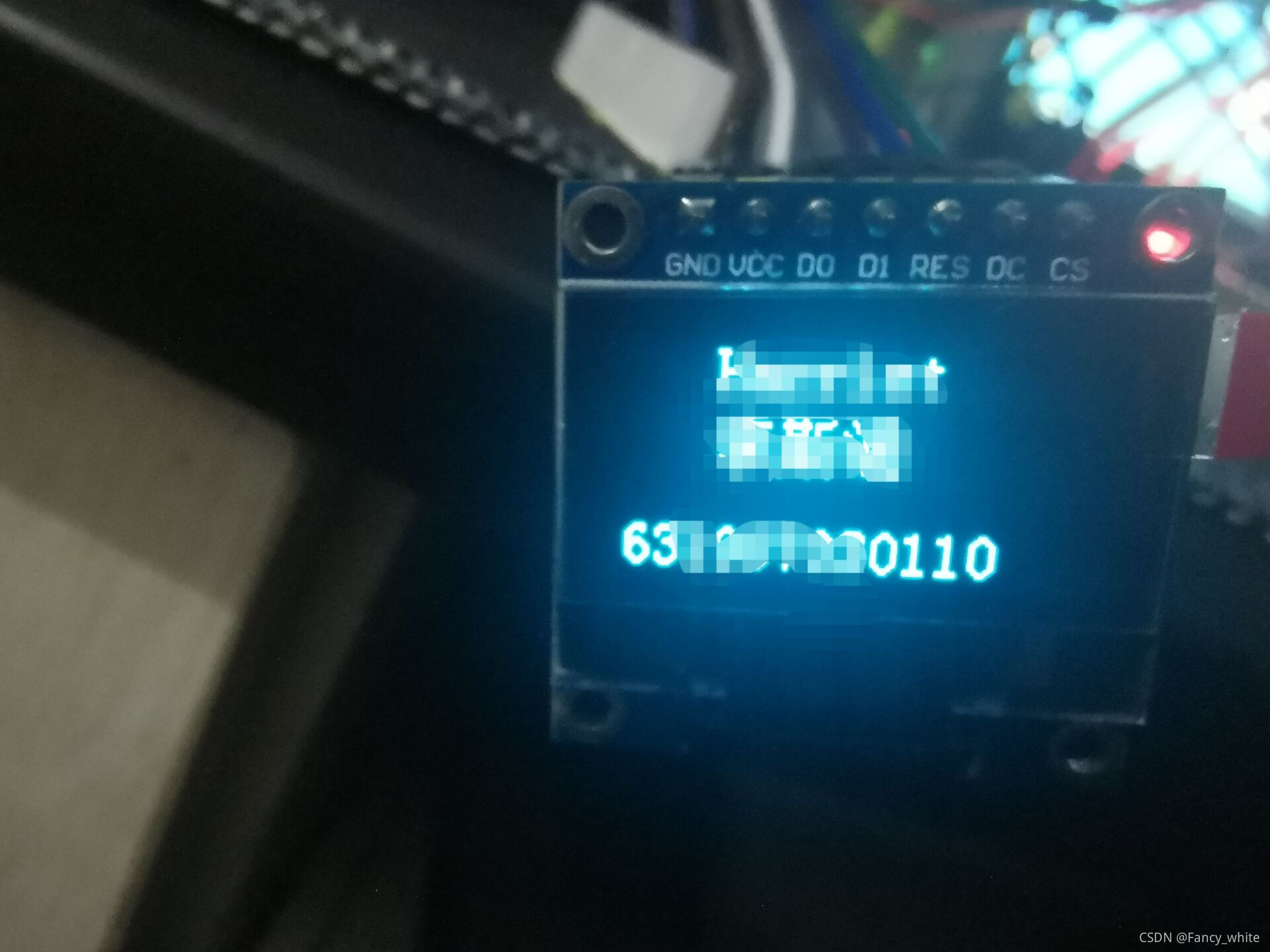
?5显示AHT20的温度和湿度??
????????过程大同小异
结果

6显示左右滑动的字符?
更改test.c可改变显示
用点阵字取模工具将对应字的字模取出来添加到oledfont中去
结果?

?四.总结
经过这次实验对I2c协议和SPI协议有了部分了解,代码是多方借鉴的,许多原理还不清楚,还需多加练习。
参考: