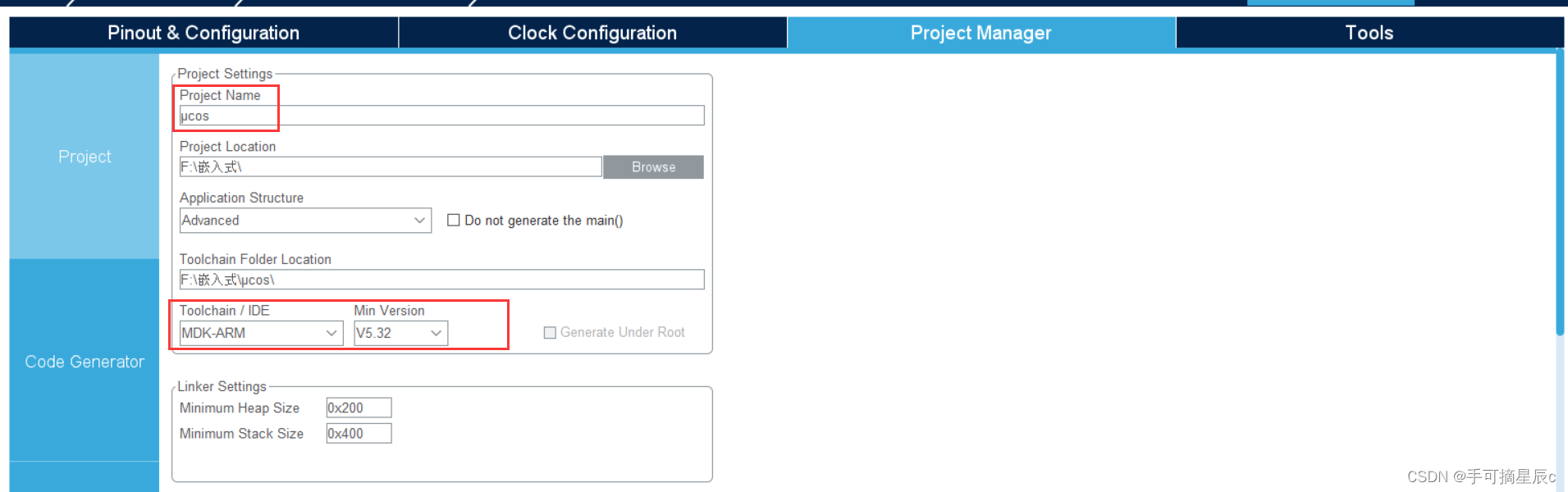
вЛЁЂSTM32CubeMXХфжУМАЙЄГЬНЈСЂ
ДђПЊSTM32CubeMXбЁдёSTM32F103C8TxаОЦЌ(ИљОнЪЕМЪЧщПіНјаабЁдё),ШЛКѓНјааЯргІЕФХфжУ
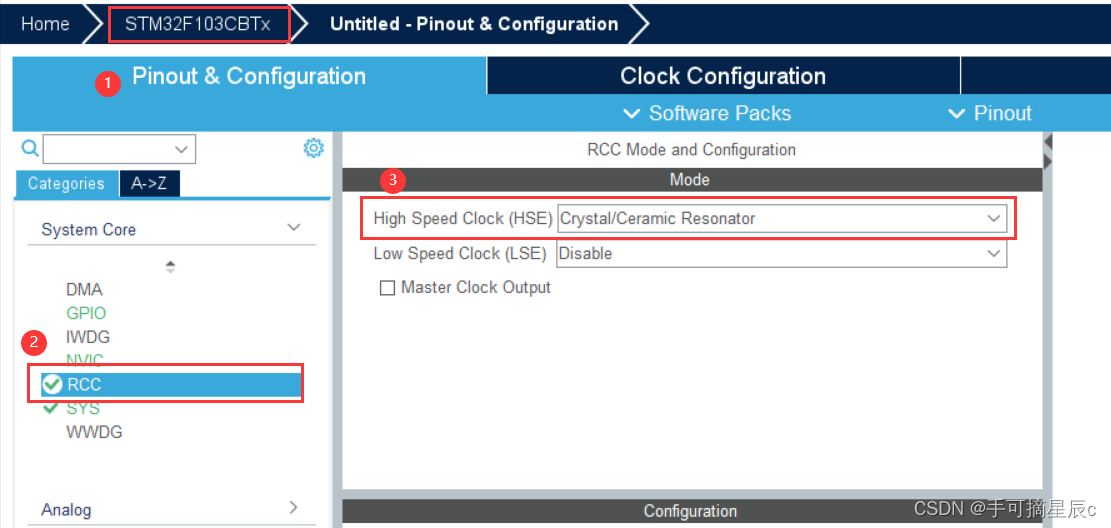
RCCХфжУ
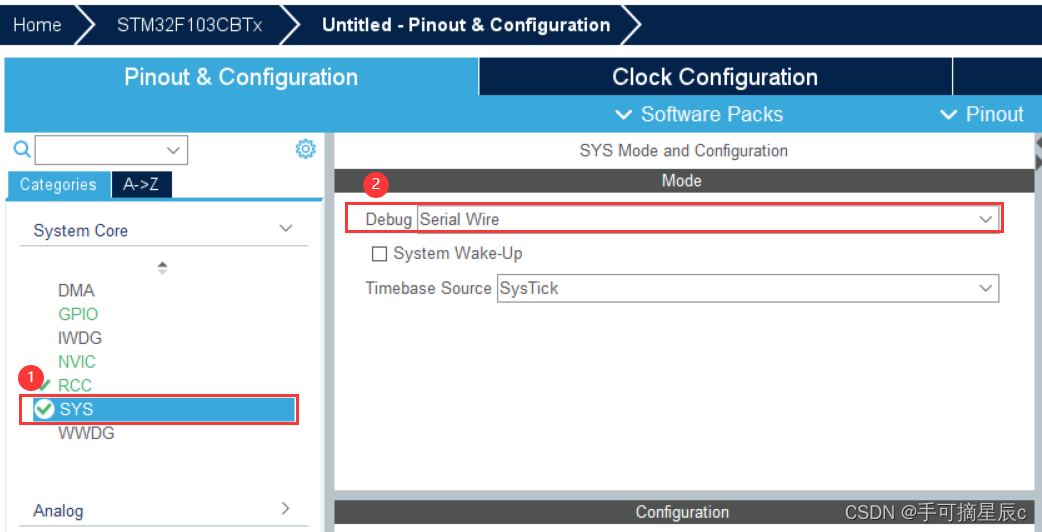
SYSХфжУ
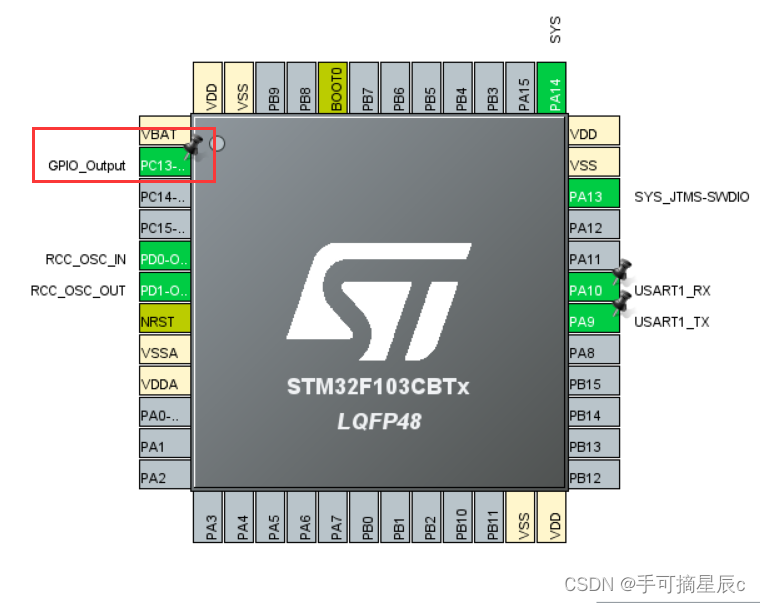
GPIOв§НХХфжУ
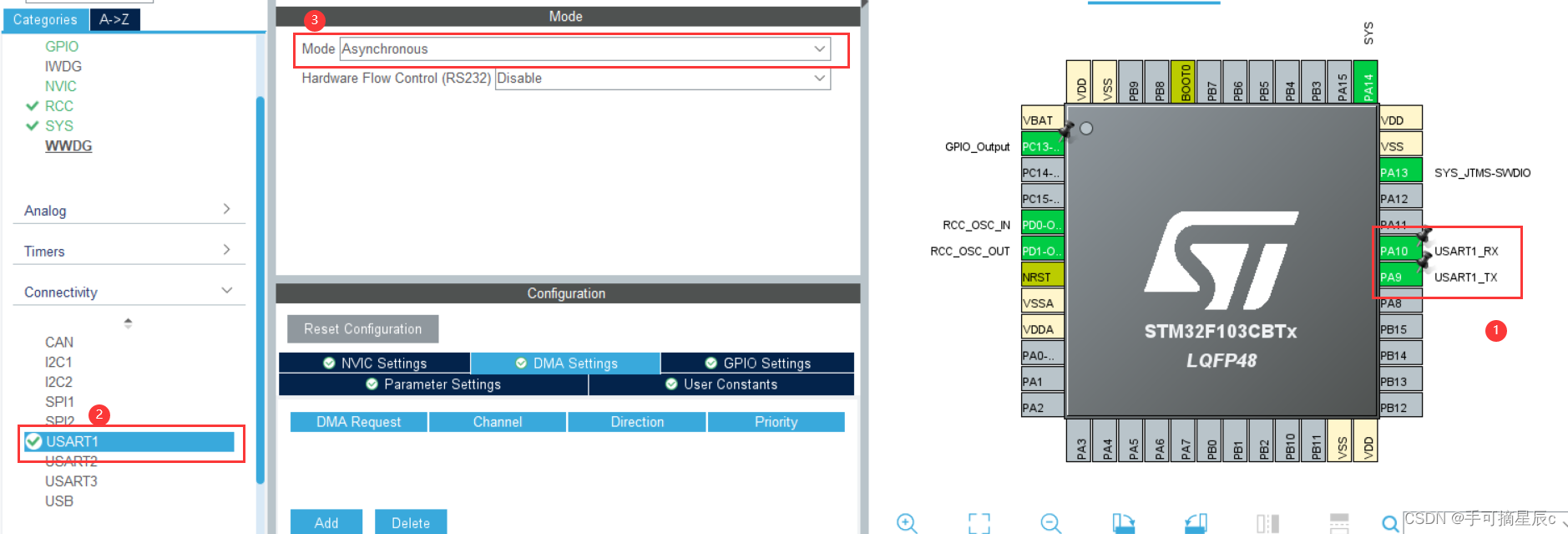
ДЎПкUSART1ХфжУ
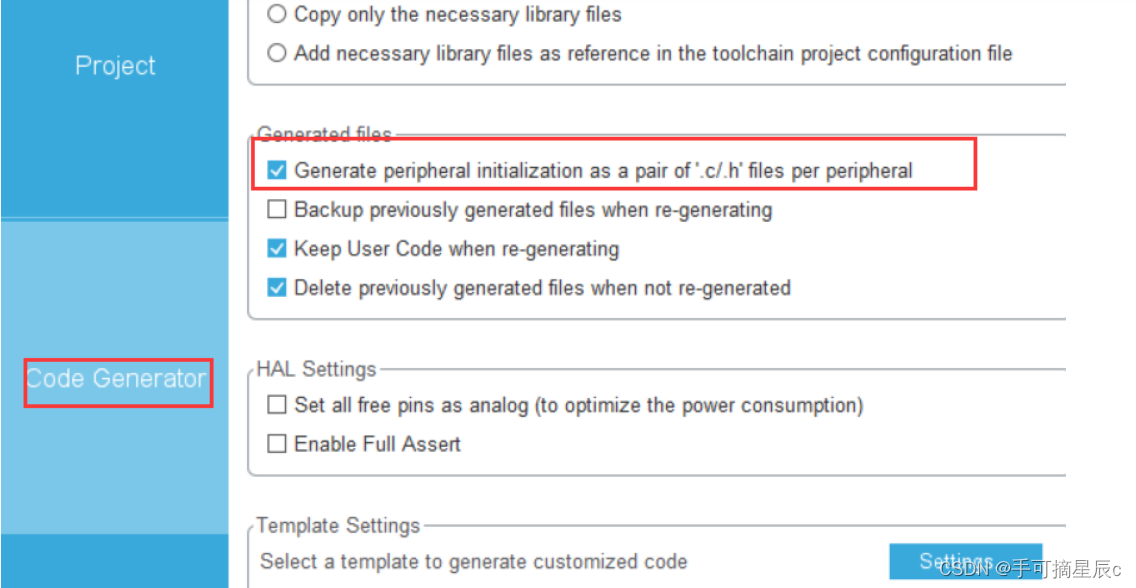
ХфжУЭъБЯКѓЕуЛїGENERATE CODEВЂЖдЙЄГЬНјааХфжУ
ЖўЁЂЯТдиІЬC/OSдДТыНјаавЦжВ
дкЙйЭјЯТдиКУuC/OSдДТы
-
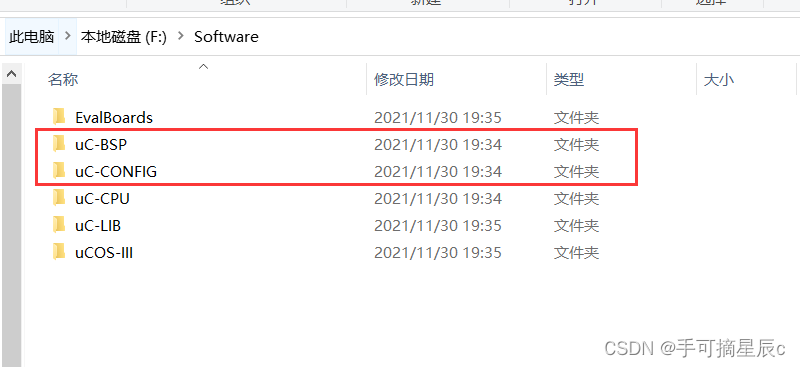
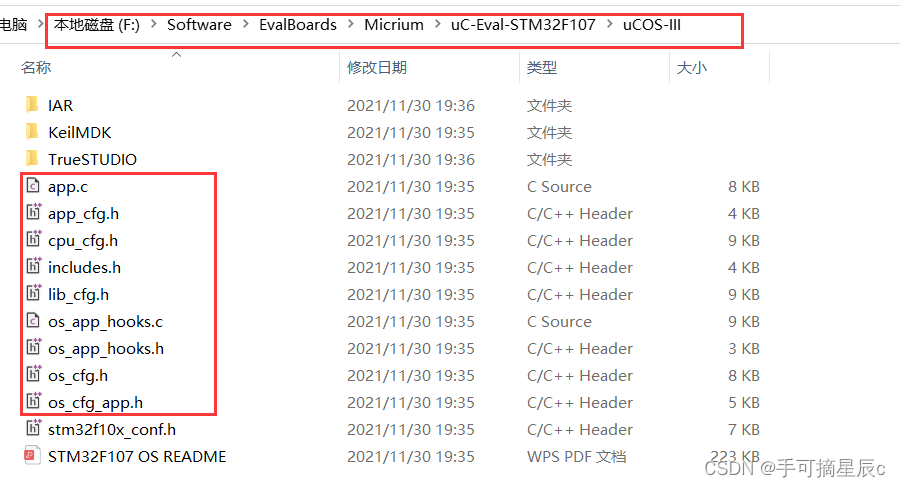
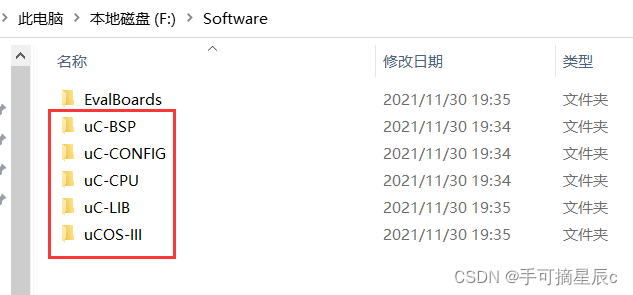
ЯТдиЭъГЩКѓДђПЊИУЮФМў,дкИУЮФМўЕБжаДДНЈСНИіЮФМў
uc-BSPКЭuc-CONFIG
-
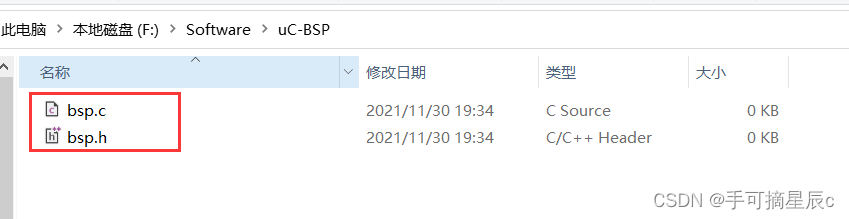
дкuc-BSPЮФМўМаЕБжаЬэМгbsp.c КЭ bsp.h ПеЮФМў
-
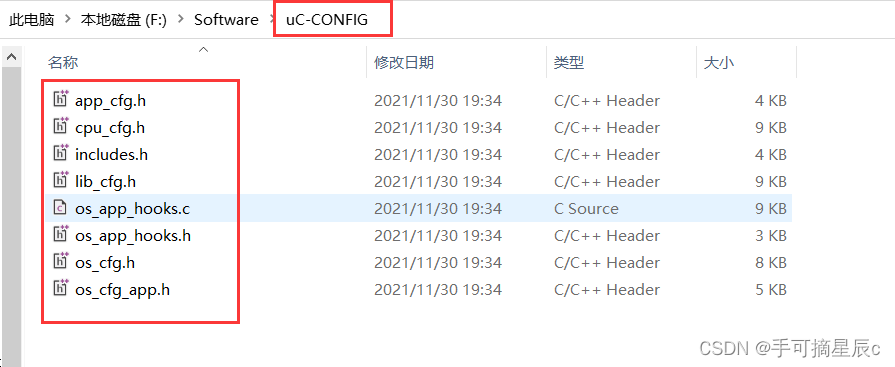
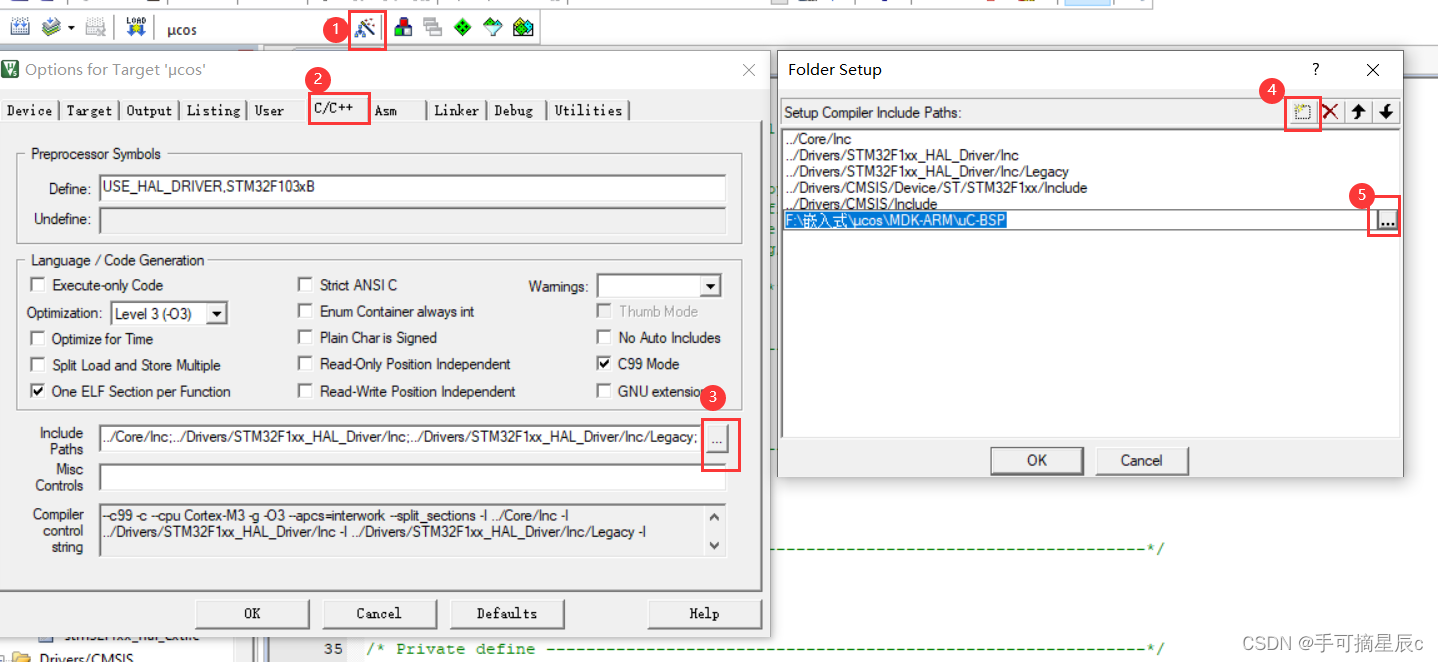
дкЯТдиЕФЮФМўЕФТЗОЖЕБжаИДжЦвдЯТЮФМў,ШЛКѓеГЬљЕНuc-CONFIGЮФМўМаЕБжа
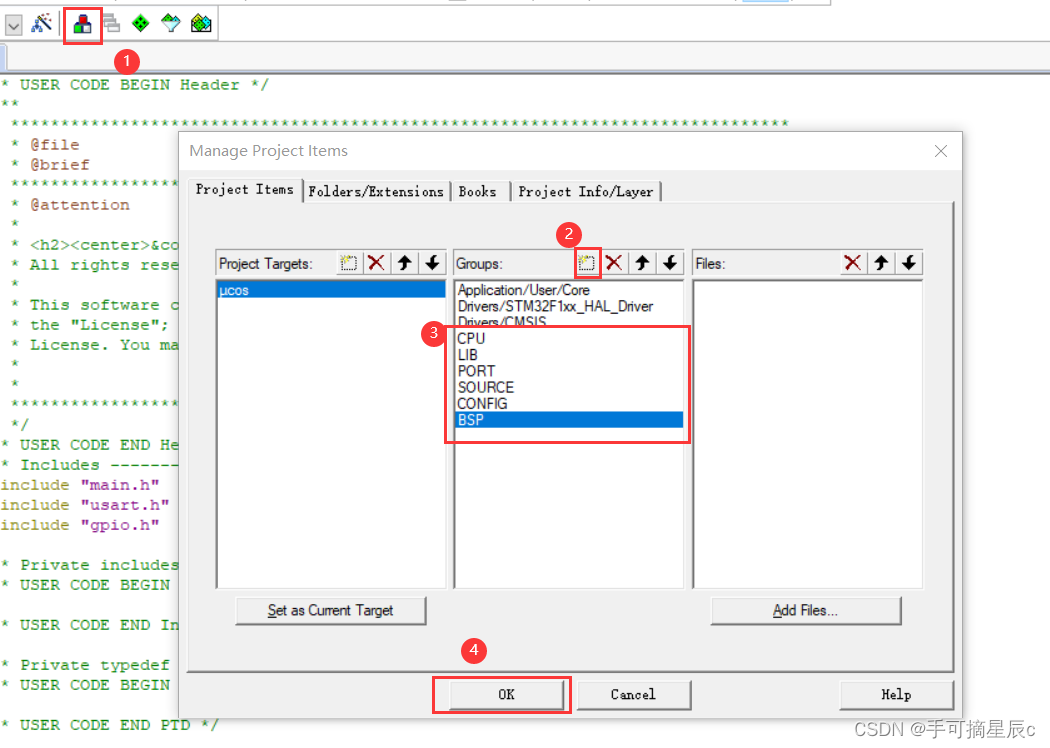
Ш§ЁЂНјаавЦжВ
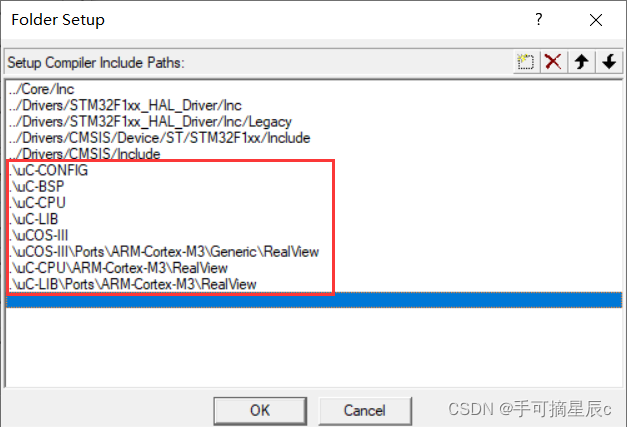
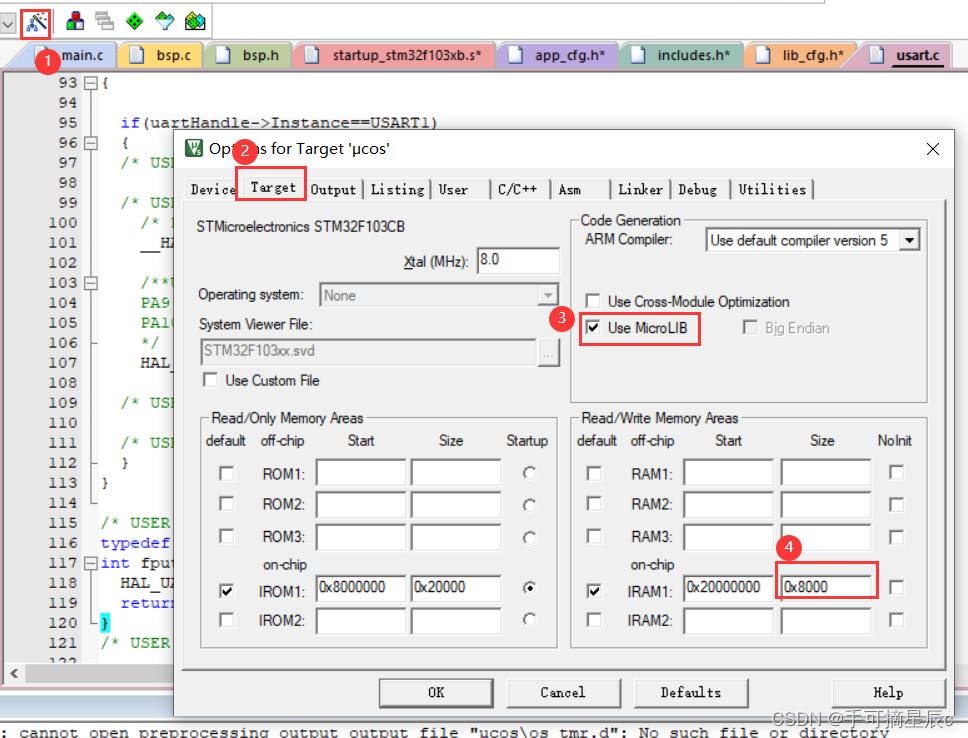
1.ЬэМгЯрЙиЮФМў
- НЋЯТдиЕФЮФМўЕБжаЕФЫљЪОЮФМўИДжЦ,ШЛКѓЗХШыЕНHALЙЄГЬЕФMDK-ARMЮФМўЕБжа

-
НЋuCOSЯрЙиЮФМўЬэМгЕНЯюФПЙЄГЬжа
-
дкЯШНЈЕФЯюФПCPUЕБжаЬэМгвдЯТЮФМў
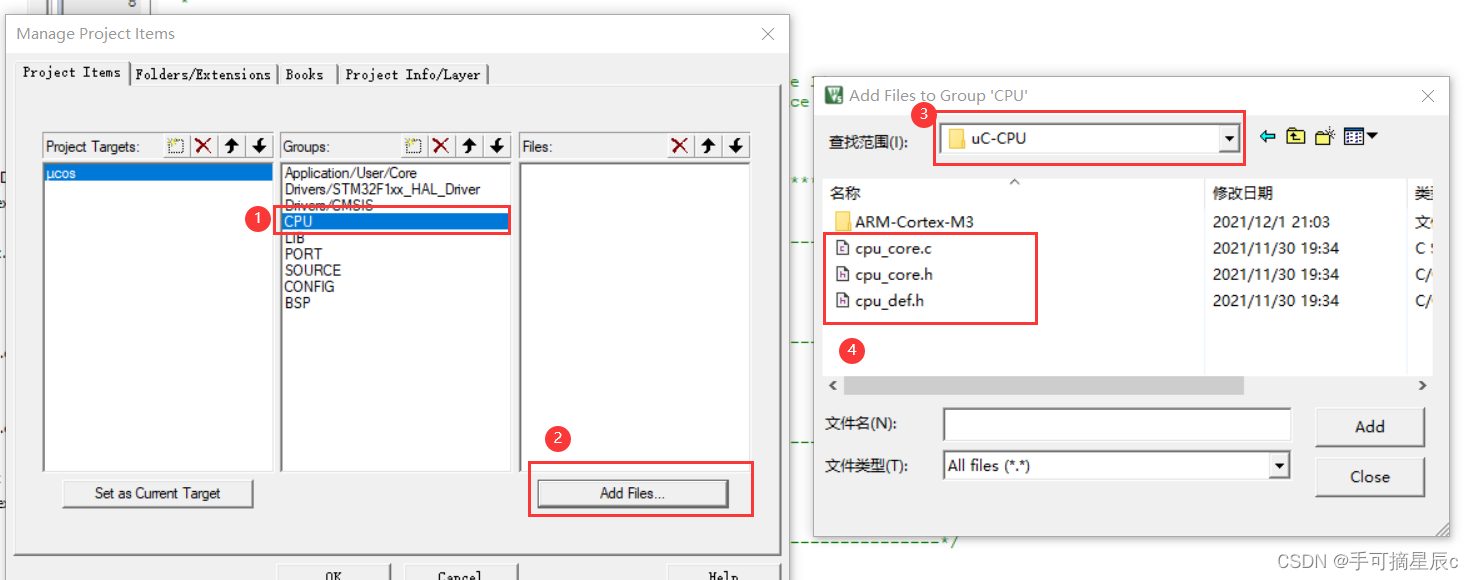
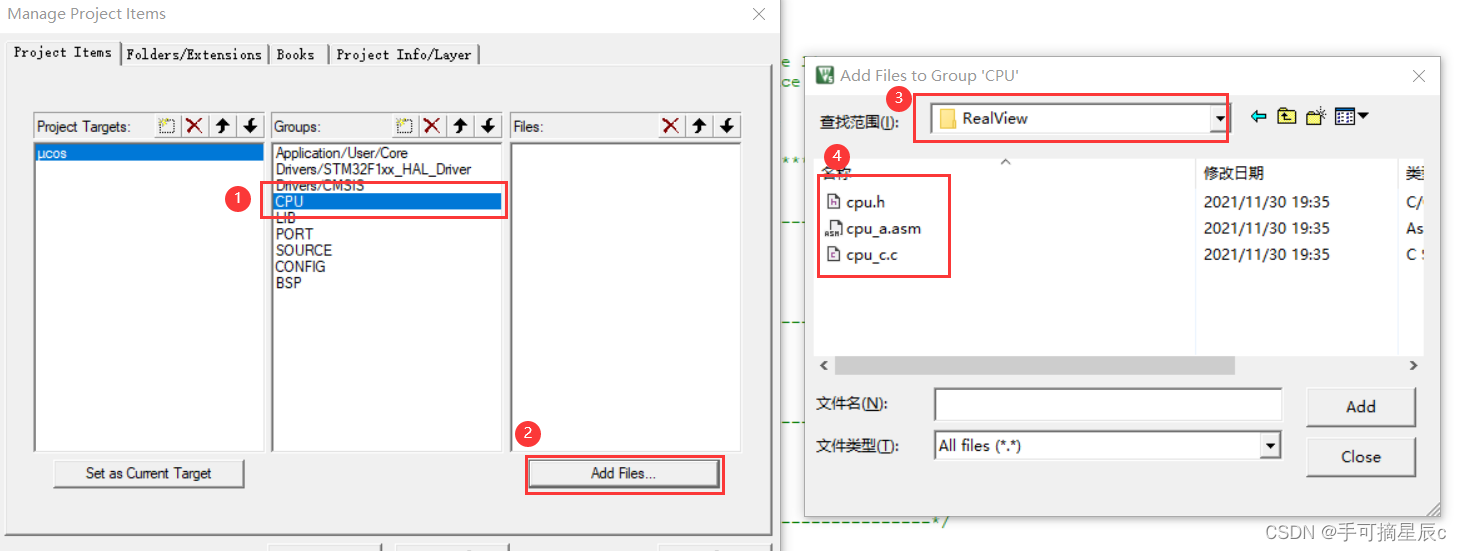
дйдкCPUЕФrealviewЮФМўЕБжаЬэМгЫљЪОЮФМў
-
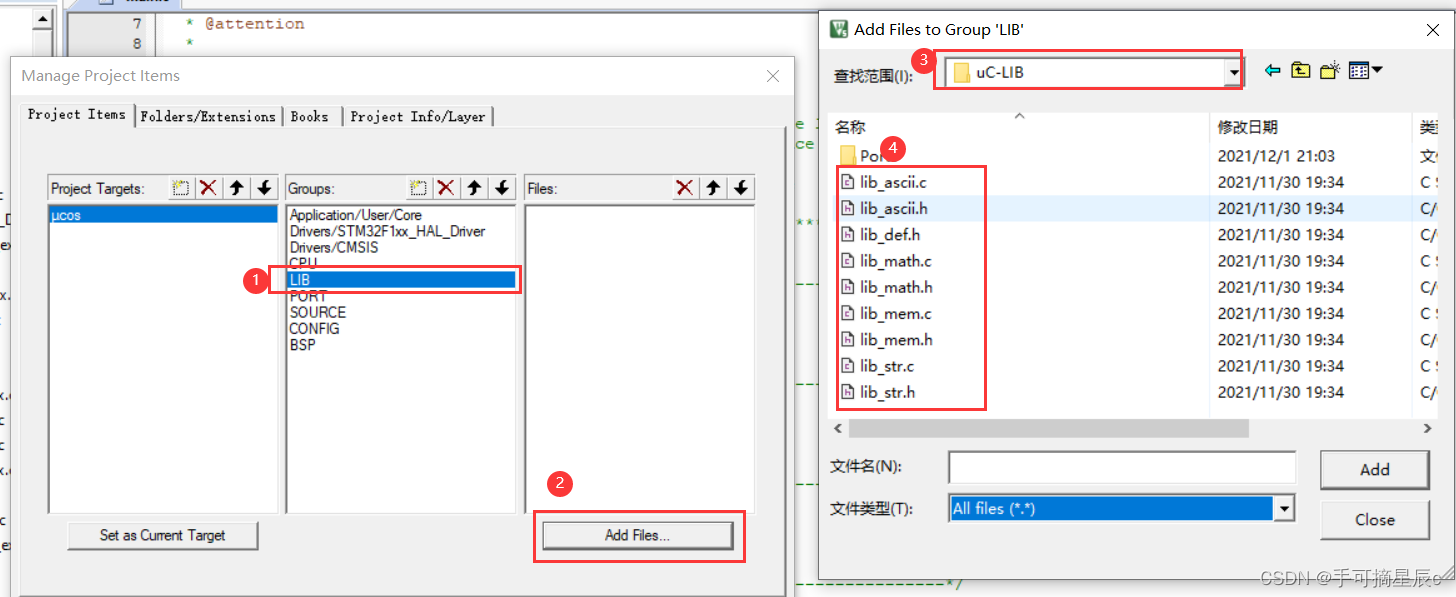
дкЯюФПLIBЕБжаЕФuc-LIBЮФМўЕБжаЬэМгЫљЪОЮФМў
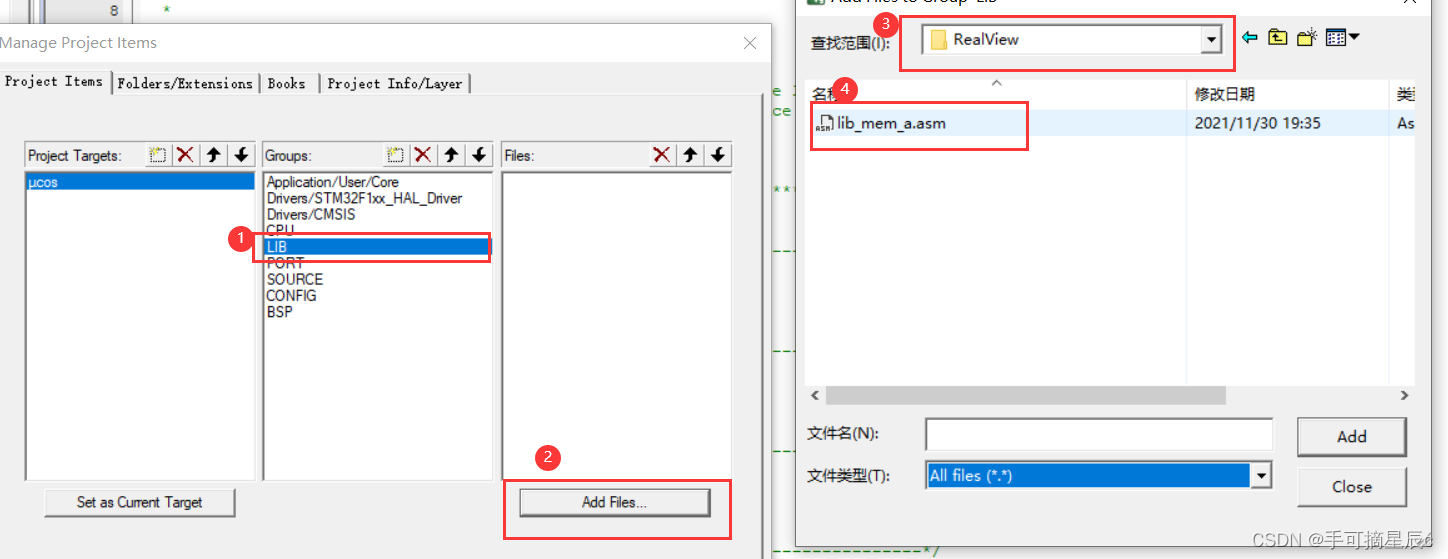
дйдкLIBЕФrealviewЮФМўЕБжаЬэМгЫљЪОЮФМў
-
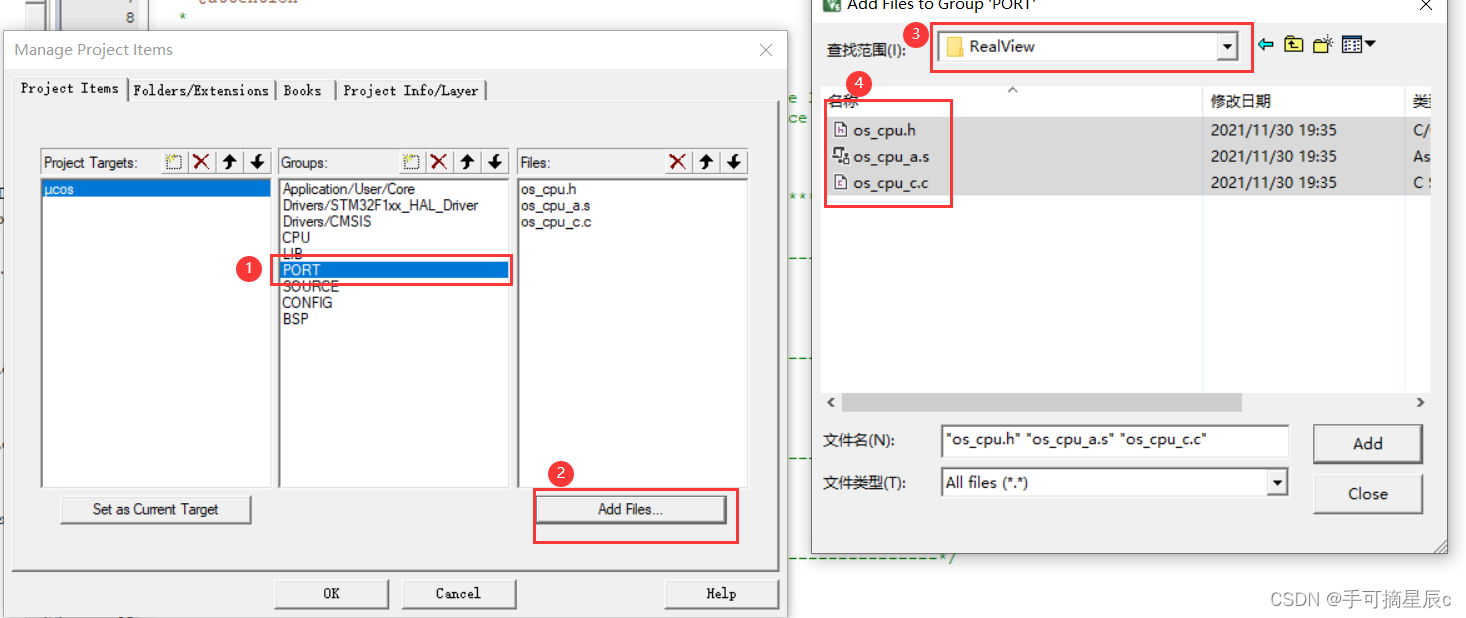
дкЯюФПPORTЕФRealViewЕБжаЬэМгЫљЪОЮФМў
-
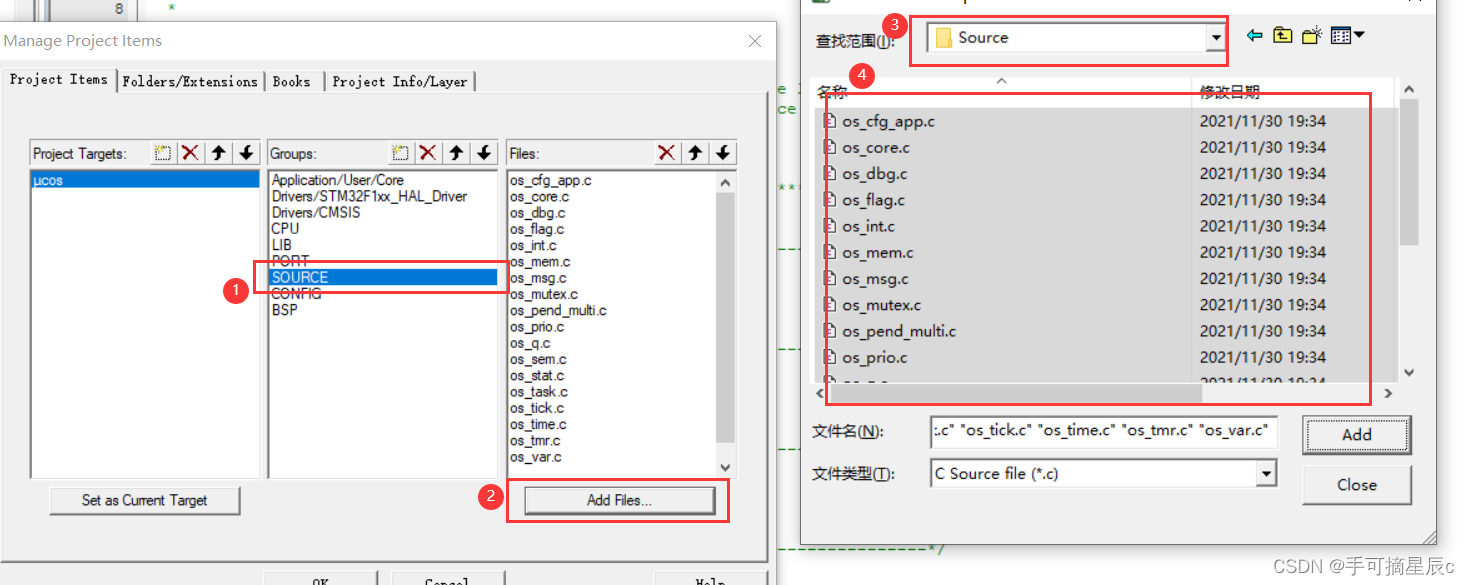
дкЯюФПSOURCEЕФSourceЮФМўЕБжаЬэМгЫљЪОЮФМў(ЫљгавЛЙВ20ИіЮФМў)
-
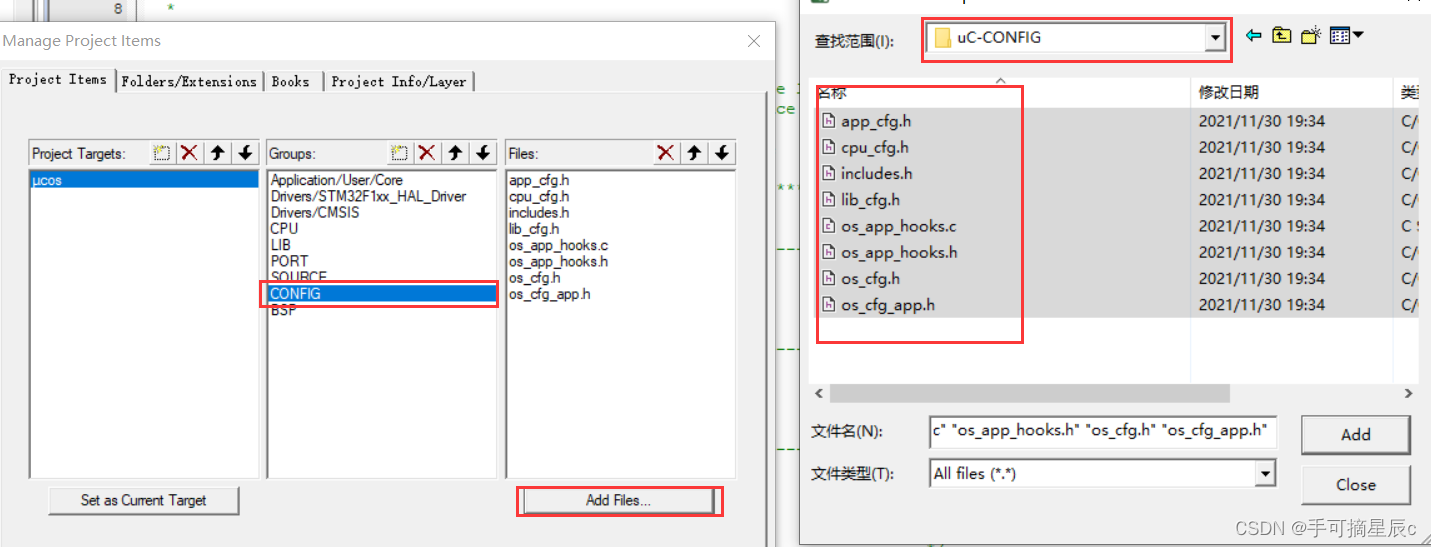
дкЯюФПCONFIGЕБжаЕФuc-CONFIGЬэМгЫљЪОЮФМў
-
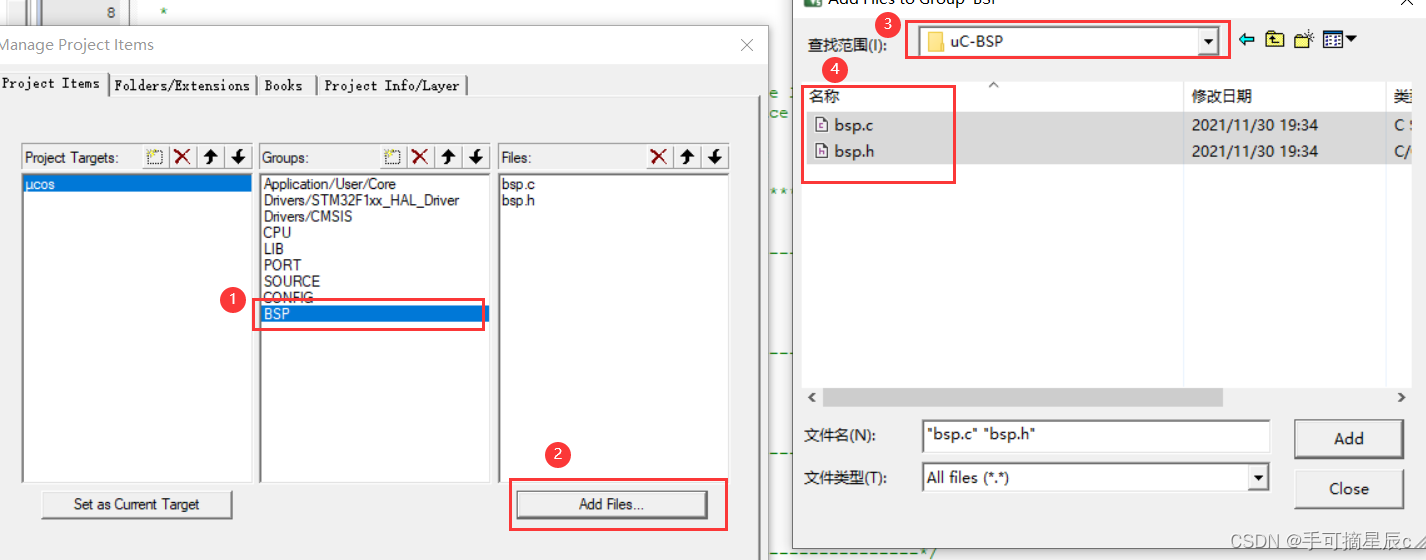
дкЯюФПBSPЕБжаЕФuc-BSPЕБжаЬэМгЫљЪОЮФМў
-
ЕМШыЮФМўТЗОЖ
АДееЭМЪОВНжшвРДЮНјаа,НЋЮФМўТЗОЖЕМШы
2.ЬэМгаоИФДњТы
- дкДДНЈЕФПеЮФМўbsp.cКЭbsp.hЕБжаЬэМгДњТы
bsp.h
// bsp.h
#ifndef __BSP_H__
#define __BSP_H__
#include "stm32f1xx_hal.h"
void BSP_Init(void);
#endif
bsp.c
// bsp.c
#include "includes.h"
#define DWT_CR *(CPU_REG32 *)0xE0001000
#define DWT_CYCCNT *(CPU_REG32 *)0xE0001004
#define DEM_CR *(CPU_REG32 *)0xE000EDFC
#define DBGMCU_CR *(CPU_REG32 *)0xE0042004
#define DEM_CR_TRCENA (1 << 24)
#define DWT_CR_CYCCNTENA (1 << 0)
CPU_INT32U BSP_CPU_ClkFreq (void)
{
return HAL_RCC_GetHCLKFreq();
}
void BSP_Tick_Init(void)
{
CPU_INT32U cpu_clk_freq;
CPU_INT32U cnts;
cpu_clk_freq = BSP_CPU_ClkFreq();
#if(OS_VERSION>=3000u)
cnts = cpu_clk_freq/(CPU_INT32U)OSCfg_TickRate_Hz;
#else
cnts = cpu_clk_freq/(CPU_INT32U)OS_TICKS_PER_SEC;
#endif
OS_CPU_SysTickInit(cnts);
}
void BSP_Init(void)
{
BSP_Tick_Init();
MX_GPIO_Init();
}
#if (CPU_CFG_TS_TMR_EN == DEF_ENABLED)
void CPU_TS_TmrInit (void)
{
CPU_INT32U cpu_clk_freq_hz;
DEM_CR |= (CPU_INT32U)DEM_CR_TRCENA; /* Enable Cortex-M3's DWT CYCCNT reg. */
DWT_CYCCNT = (CPU_INT32U)0u;
DWT_CR |= (CPU_INT32U)DWT_CR_CYCCNTENA;
cpu_clk_freq_hz = BSP_CPU_ClkFreq();
CPU_TS_TmrFreqSet(cpu_clk_freq_hz);
}
#endif
#if (CPU_CFG_TS_TMR_EN == DEF_ENABLED)
CPU_TS_TMR CPU_TS_TmrRd (void)
{
return ((CPU_TS_TMR)DWT_CYCCNT);
}
#endif
#if (CPU_CFG_TS_32_EN == DEF_ENABLED)
CPU_INT64U CPU_TS32_to_uSec (CPU_TS32 ts_cnts)
{
CPU_INT64U ts_us;
CPU_INT64U fclk_freq;
fclk_freq = BSP_CPU_ClkFreq();
ts_us = ts_cnts / (fclk_freq / DEF_TIME_NBR_uS_PER_SEC);
return (ts_us);
}
#endif
#if (CPU_CFG_TS_64_EN == DEF_ENABLED)
CPU_INT64U CPU_TS64_to_uSec (CPU_TS64 ts_cnts)
{
CPU_INT64U ts_us;
CPU_INT64U fclk_freq;
fclk_freq = BSP_CPU_ClkFreq();
ts_us = ts_cnts / (fclk_freq / DEF_TIME_NBR_uS_PER_SEC);
return (ts_us);
}
#endif
- дкmain.cЮФМўЕБжааоИФДњТы
main.c
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "gpio.h"
#include "usart.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <includes.h>
#include "stm32f1xx_hal.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* ШЮЮёгХЯШМЖ */
#define START_TASK_PRIO 3
#define LED0_TASK_PRIO 4
#define MSG_TASK_PRIO 5
/* ШЮЮёЖбеЛДѓаЁ */
#define START_STK_SIZE 64
#define LED0_STK_SIZE 64
#define MSG_STK_SIZE 64//ШЮЮёЖбДѓаЁЙ§ДѓЛсБЈДэ,ПЩвдЪдзХИФаЁвЛЕу
/* ШЮЮёеЛ */
CPU_STK START_TASK_STK[START_STK_SIZE];
CPU_STK LED0_TASK_STK[LED0_STK_SIZE];
CPU_STK MSG_TASK_STK[MSG_STK_SIZE];
/* ШЮЮёПижЦПщ */
OS_TCB StartTaskTCB;
OS_TCB Led0TaskTCB;
OS_TCB MsgTaskTCB;
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* ШЮЮёКЏЪ§ЖЈвх */
void start_task(void *p_arg);
static void AppTaskCreate(void);
static void AppObjCreate(void);
static void led_pc13(void *p_arg);
static void send_msg(void *p_arg);
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
OS_ERR err;
OSInit(&err);
HAL_Init();
SystemClock_Config();
//MX_GPIO_Init(); етИідкBSPЕФГѕЪМЛЏРявВЛсГѕЪМЛЏ
MX_USART1_UART_Init();
/* ДДНЈШЮЮё */
OSTaskCreate((OS_TCB *)&StartTaskTCB, /* Create the start task */
(CPU_CHAR *)"start task",
(OS_TASK_PTR ) start_task,
(void *) 0,
(OS_PRIO ) START_TASK_PRIO,
(CPU_STK *)&START_TASK_STK[0],
(CPU_STK_SIZE) START_STK_SIZE/10,
(CPU_STK_SIZE) START_STK_SIZE,
(OS_MSG_QTY ) 0,
(OS_TICK ) 0,
(void *) 0,
(OS_OPT )(OS_OPT_TASK_STK_CHK | OS_OPT_TASK_STK_CLR),
(OS_ERR *)&err);
/* ЦєЖЏЖрШЮЮёЯЕЭГ,ПижЦШЈНЛИјuC/OS-III */
OSStart(&err); /* Start multitasking (i.e. give control to uC/OS-III). */
}
void start_task(void *p_arg)
{
OS_ERR err;
CPU_SR_ALLOC();
p_arg = p_arg;
/* YangJie add 2021.05.20*/
BSP_Init(); /* Initialize BSP functions */
//CPU_Init();
//Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); //ЭГМЦШЮЮё
#endif
#ifdef CPU_CFG_INT_DIS_MEAS_EN //ШчЙћЪЙФмСЫВтСПжаЖЯЙиБеЪБМф
CPU_IntDisMeasMaxCurReset();
#endif
#if OS_CFG_SCHED_ROUND_ROBIN_EN //ЕБЪЙгУЪБМфЦЌТжзЊЕФЪБКђ
//ЪЙФмЪБМфЦЌТжзЊЕїЖШЙІФм,ЪБМфЦЌГЄЖШЮЊ1ИіЯЕЭГЪБжгНкХФ,МШ1*5=5ms
OSSchedRoundRobinCfg(DEF_ENABLED,1,&err);
#endif
OS_CRITICAL_ENTER(); //НјШыСйНчЧј
/* ДДНЈLED0ШЮЮё */
OSTaskCreate((OS_TCB * )&Led0TaskTCB,
(CPU_CHAR * )"led_pc13",
(OS_TASK_PTR )led_pc13,
(void * )0,
(OS_PRIO )LED0_TASK_PRIO,
(CPU_STK * )&LED0_TASK_STK[0],
(CPU_STK_SIZE)LED0_STK_SIZE/10,
(CPU_STK_SIZE)LED0_STK_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )0,
(void * )0,
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,
(OS_ERR * )&err);
/* ДДНЈLED1ШЮЮё */
OSTaskCreate((OS_TCB * )&MsgTaskTCB,
(CPU_CHAR * )"send_msg",
(OS_TASK_PTR )send_msg,
(void * )0,
(OS_PRIO )MSG_TASK_PRIO,
(CPU_STK * )&MSG_TASK_STK[0],
(CPU_STK_SIZE)MSG_STK_SIZE/10,
(CPU_STK_SIZE)MSG_STK_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )0,
(void * )0,
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,
(OS_ERR * )&err);
OS_TaskSuspend((OS_TCB*)&StartTaskTCB,&err); //ЙвЦ№ПЊЪМШЮЮё
OS_CRITICAL_EXIT(); //НјШыСйНчЧј
}
/**
* КЏЪ§ЙІФм: ЦєЖЏШЮЮёКЏЪ§ЬхЁЃ
* ЪфШыВЮЪ§: p_arg ЪЧдкДДНЈИУШЮЮёЪБДЋЕнЕФаЮВЮ
* ЗЕ Ли жЕ: Юо
* ЫЕ Уї:Юо
*/
static void led_pc13 (void *p_arg)
{
OS_ERR err;
(void)p_arg;
BSP_Init(); /* Initialize BSP functions */
CPU_Init();
Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); /* Compute CPU capacity with no task running */
#endif
CPU_IntDisMeasMaxCurReset();
AppTaskCreate(); /* Create Application Tasks */
AppObjCreate(); /* Create Application Objects */
while (DEF_TRUE)
{
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_13,GPIO_PIN_RESET);
OSTimeDlyHMSM(0, 0, 0, 500,OS_OPT_TIME_HMSM_STRICT,&err);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_13,GPIO_PIN_SET);
OSTimeDlyHMSM(0, 0, 0, 500,OS_OPT_TIME_HMSM_STRICT,&err);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
static void send_msg (void *p_arg)
{
OS_ERR err;
(void)p_arg;
BSP_Init(); /* Initialize BSP functions */
CPU_Init();
Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); /* Compute CPU capacity with no task running */
#endif
CPU_IntDisMeasMaxCurReset();
AppTaskCreate(); /* Create Application Tasks */
AppObjCreate(); /* Create Application Objects */
while (DEF_TRUE)
{
printf("hello uc/OS! ЛЖгРДЕН RTOS ЖрШЮЮёЛЗОГ! \r\n");
OSTimeDlyHMSM(0, 0, 0, 500,OS_OPT_TIME_HMSM_STRICT,&err);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/* USER CODE BEGIN 4 */
/**
* КЏЪ§ЙІФм: ДДНЈгІгУШЮЮё
* ЪфШыВЮЪ§: p_arg ЪЧдкДДНЈИУШЮЮёЪБДЋЕнЕФаЮВЮ
* ЗЕ Ли жЕ: Юо
* ЫЕ Уї:Юо
*/
static void AppTaskCreate (void)
{
}
/**
* КЏЪ§ЙІФм: uCOSIIIФкКЫЖдЯѓДДНЈ
* ЪфШыВЮЪ§: Юо
* ЗЕ Ли жЕ: Юо
* ЫЕ Уї:Юо
*/
static void AppObjCreate (void)
{
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
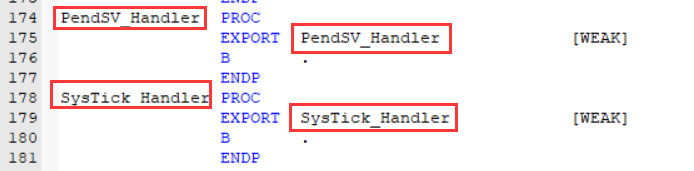
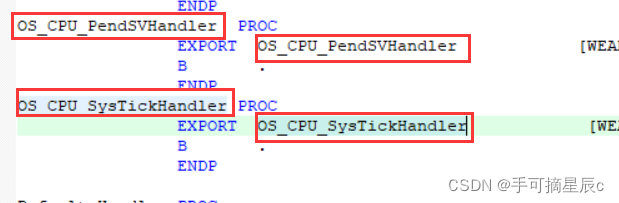
- аоИФЦєЖЏЯюЮФМў startup_stm32f103xb.s
НЋЦєЖЏЮФМў startup_stm32f103xb.sРяетСНДІЕФ PendSV_HandlerКЭSystick_Handler ИФЮЊ OS_CPU_PendSVHandlerКЭOS_CPU_SysTickHandlerЁЃ


- аоИФCONFIGжаЕФapp_cfg.hЮФМў
НЋ#define APP_CFG_SERIAL_EN DEF_ENABLED ИФЮЊ #define APP_CFG_SERIAL_EN DEF_DISABLED
НЋ#define APP_TRACE BSP_Ser_Printf ИФЮЊ #define APP_TRACE (void)
- аоИФCONFIGЮФМўжаЕФincludes.hЮФМў
дкШчЭМЫљЪОЮЛжУЬэМг#include "gpio.h"КЭ#include ЁАapp_cfg.hЁБ
дйдкЫљЪОЮЛжУНЋ#include <stm32f10x_lib.h> ИФЮЊ #include ЁАstm32f1xx_hal.hЁБ - аоИФCONFIGжаЕФlib_cfg.hЮФМў
НЋШчЭМЫљЪОЕФДњТыаоИФЮЊ5u*1024u,вђЮЊSTM32F103C8T6ЕФФкДцжЛвЊ20k,вЊаоИФЮЊИќаЁвЛЕу,ВЛФмГЌЙ§

- аоИФusart.cЮФМў
дкШчЭМЫљЪОЕФЮЛжУЬэМгШчЯТДњТы,ЖдprintfНјаажиЖЈЯђ
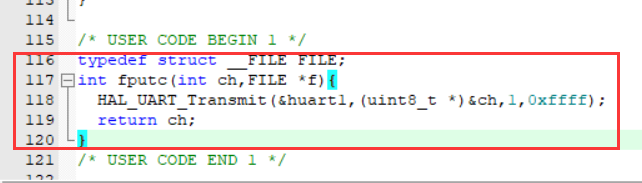
/* USER CODE BEGIN 1 */
typedef struct __FILE FILE;
int fputc(int ch,FILE *f){
HAL_UART_Transmit(&huart1,(uint8_t *)&ch,1,0xffff);
return ch;
}
/* USER CODE END 1 */
- ХфжУВЮЪ§
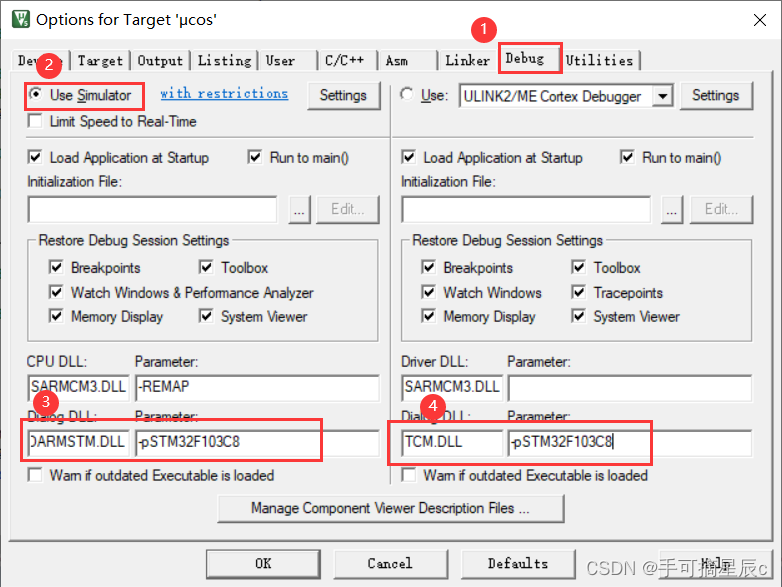
ХфжУЭъБЯКѓЕуЛїOK
ЫФЁЂдЫаааЇЙћ
НЋЩњГЩКѓЕФ.hexЮФМўЩеТМЕНаОЦЌжа,НгКУЯпТЗКѓ,ДђПЊДЎПкЕїЪджњЪж
ШЮЮёвЛ:ДЎПкЗЂЫЭЪ§Он
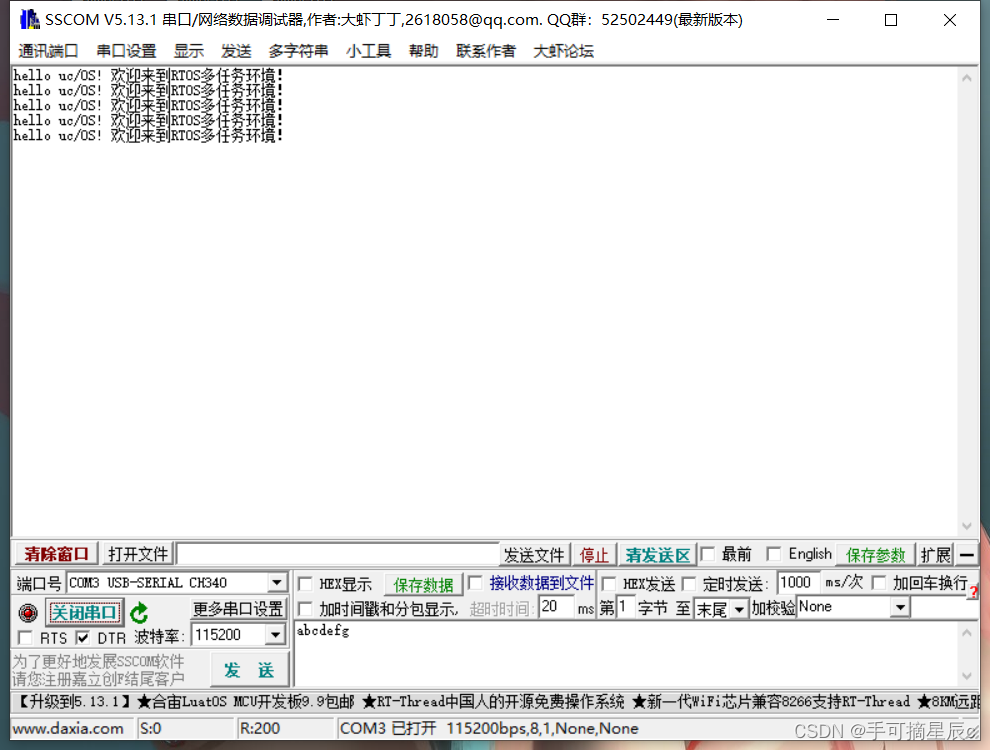
ШЮЮёЖў:LEDЕЦЩСЫИ

ЮхЁЂЬэМгЖрШЮЮёдЫаа
дкСНИіШЮЮёЕФЛљДЁЩЯ,дйЬэМгвЛИіШЮЮё,вЊЧѓ:
ЦфжаСНИі task ЗжБ№вд 1s КЭ 3s жмЦкЖд LED ЕШНјааЕуСС-ЯЈУ№ЕФПижЦ;
СэЭтвЛИі task вд 2s жмЦкЭЈЙ§ДЎПкЗЂЫЭЁА hello uc/OS! ЛЖгРДЕНRTOSЖрШЮЮёЛЗОГ!ЁБ
- аоИФgpio.cЮФМўжаЕФДњТы
void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_3, GPIO_PIN_RESET);
/*Configure GPIO pin : PC13 */
GPIO_InitStruct.Pin = GPIO_PIN_13|GPIO_PIN_3;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
- аоИФmain.cЮФМўжаЕФДњТы
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "gpio.h"
#include "usart.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <includes.h>
#include "stm32f1xx_hal.h"
/* USER CODE END Includes */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* ШЮЮёгХЯШМЖ */
#define START_TASK_PRIO 3
#define LED0_TASK_PRIO 4
#define MSG_TASK_PRIO 5
#define LED1_TASK_PRIO 6
/* ШЮЮёЖбеЛДѓаЁ */
#define START_STK_SIZE 96
#define LED0_STK_SIZE 64
#define MSG_STK_SIZE 64
#define LED1_STK_SIZE 64
/* ШЮЮёеЛ */
CPU_STK START_TASK_STK[START_STK_SIZE];
CPU_STK LED0_TASK_STK[LED0_STK_SIZE];
CPU_STK MSG_TASK_STK[MSG_STK_SIZE];
CPU_STK LED1_TASK_STK[LED1_STK_SIZE];
/* ШЮЮёПижЦПщ */
OS_TCB StartTaskTCB;
OS_TCB Led0TaskTCB;
OS_TCB MsgTaskTCB;
OS_TCB Led1TaskTCB;
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* ШЮЮёКЏЪ§ЖЈвх */
void start_task(void *p_arg);
static void AppTaskCreate(void);
static void AppObjCreate(void);
static void led_pc13(void *p_arg);
static void send_msg(void *p_arg);
static void led_pa3(void *p_arg);
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
OS_ERR err;
OSInit(&err);
HAL_Init();
SystemClock_Config();
//MX_GPIO_Init(); етИідкBSPЕФГѕЪМЛЏРявВЛсГѕЪМЛЏ
MX_USART1_UART_Init();
/* ДДНЈШЮЮё */
OSTaskCreate((OS_TCB *)&StartTaskTCB, /* Create the start task */
(CPU_CHAR *)"start task",
(OS_TASK_PTR ) start_task,
(void *) 0,
(OS_PRIO ) START_TASK_PRIO,
(CPU_STK *)&START_TASK_STK[0],
(CPU_STK_SIZE) START_STK_SIZE/10,
(CPU_STK_SIZE) START_STK_SIZE,
(OS_MSG_QTY ) 0,
(OS_TICK ) 0,
(void *) 0,
(OS_OPT )(OS_OPT_TASK_STK_CHK | OS_OPT_TASK_STK_CLR),
(OS_ERR *)&err);
/* ЦєЖЏЖрШЮЮёЯЕЭГ,ПижЦШЈНЛИјuC/OS-III */
OSStart(&err); /* Start multitasking (i.e. give control to uC/OS-III). */
}
void start_task(void *p_arg)
{
OS_ERR err;
CPU_SR_ALLOC();
p_arg = p_arg;
/* YangJie add 2021.05.20*/
BSP_Init(); /* Initialize BSP functions */
//CPU_Init();
//Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); //ЭГМЦШЮЮё
#endif
#ifdef CPU_CFG_INT_DIS_MEAS_EN //ШчЙћЪЙФмСЫВтСПжаЖЯЙиБеЪБМф
CPU_IntDisMeasMaxCurReset();
#endif
#if OS_CFG_SCHED_ROUND_ROBIN_EN //ЕБЪЙгУЪБМфЦЌТжзЊЕФЪБКђ
//ЪЙФмЪБМфЦЌТжзЊЕїЖШЙІФм,ЪБМфЦЌГЄЖШЮЊ1ИіЯЕЭГЪБжгНкХФ,МШ1*5=5ms
OSSchedRoundRobinCfg(DEF_ENABLED,1,&err);
#endif
OS_CRITICAL_ENTER(); //НјШыСйНчЧј
/* ДДНЈLED0ШЮЮё */
OSTaskCreate((OS_TCB * )&Led0TaskTCB,
(CPU_CHAR * )"led_pc13",
(OS_TASK_PTR )led_pc13,
(void * )0,
(OS_PRIO )LED0_TASK_PRIO,
(CPU_STK * )&LED0_TASK_STK[0],
(CPU_STK_SIZE)LED0_STK_SIZE/10,
(CPU_STK_SIZE)LED0_STK_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )0,
(void * )0,
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,
(OS_ERR * )&err);
/* ДДНЈLED1ШЮЮё */
OSTaskCreate((OS_TCB * )&Led1TaskTCB,
(CPU_CHAR * )"led_pa3",
(OS_TASK_PTR )led_pa3,
(void * )0,
(OS_PRIO )LED1_TASK_PRIO,
(CPU_STK * )&LED1_TASK_STK[0],
(CPU_STK_SIZE)LED1_STK_SIZE/10,
(CPU_STK_SIZE)LED1_STK_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )0,
(void * )0,
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,
(OS_ERR * )&err);
/* ДДНЈMSGШЮЮё */
OSTaskCreate((OS_TCB * )&MsgTaskTCB,
(CPU_CHAR * )"send_msg",
(OS_TASK_PTR )send_msg,
(void * )0,
(OS_PRIO )MSG_TASK_PRIO,
(CPU_STK * )&MSG_TASK_STK[0],
(CPU_STK_SIZE)MSG_STK_SIZE/10,
(CPU_STK_SIZE)MSG_STK_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )0,
(void * )0,
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,
(OS_ERR * )&err);
OS_TaskSuspend((OS_TCB*)&StartTaskTCB,&err); //ЙвЦ№ПЊЪМШЮЮё
OS_CRITICAL_EXIT(); //НјШыСйНчЧј
}
/**
* КЏЪ§ЙІФм: ЦєЖЏШЮЮёКЏЪ§ЬхЁЃ
* ЪфШыВЮЪ§: p_arg ЪЧдкДДНЈИУШЮЮёЪБДЋЕнЕФаЮВЮ
* ЗЕ Ли жЕ: Юо
* ЫЕ Уї:Юо
*/
static void led_pc13 (void *p_arg)
{
OS_ERR err;
(void)p_arg;
BSP_Init(); /* Initialize BSP functions */
CPU_Init();
Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); /* Compute CPU capacity with no task running */
#endif
CPU_IntDisMeasMaxCurReset();
AppTaskCreate(); /* Create Application Tasks */
AppObjCreate(); /* Create Application Objects */
while (DEF_TRUE)
{
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_13,GPIO_PIN_RESET);
OSTimeDlyHMSM(0, 0, 1, 0,OS_OPT_TIME_HMSM_STRICT,&err);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_13,GPIO_PIN_SET);
OSTimeDlyHMSM(0, 0, 1, 0,OS_OPT_TIME_HMSM_STRICT,&err);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
static void led_pa3 (void *p_arg)
{
OS_ERR err;
(void)p_arg;
BSP_Init(); /* Initialize BSP functions */
CPU_Init();
Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); /* Compute CPU capacity with no task running */
#endif
CPU_IntDisMeasMaxCurReset();
AppTaskCreate(); /* Create Application Tasks */
AppObjCreate(); /* Create Application Objects */
while (DEF_TRUE)
{
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_3,GPIO_PIN_RESET);
OSTimeDlyHMSM(0, 0, 3, 0,OS_OPT_TIME_HMSM_STRICT,&err);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_3,GPIO_PIN_SET);
OSTimeDlyHMSM(0, 0, 3, 0,OS_OPT_TIME_HMSM_STRICT,&err);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
static void send_msg (void *p_arg)
{
OS_ERR err;
(void)p_arg;
BSP_Init(); /* Initialize BSP functions */
CPU_Init();
Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); /* Compute CPU capacity with no task running */
#endif
CPU_IntDisMeasMaxCurReset();
AppTaskCreate(); /* Create Application Tasks */
AppObjCreate(); /* Create Application Objects */
while (DEF_TRUE)
{
printf("hello uc/OS! ЛЖгРДЕНRTOSЖрШЮЮёЛЗОГ! \r\n");
OSTimeDlyHMSM(0, 0, 2, 0,OS_OPT_TIME_HMSM_STRICT,&err);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/* USER CODE BEGIN 4 */
/**
* КЏЪ§ЙІФм: ДДНЈгІгУШЮЮё
* ЪфШыВЮЪ§: p_arg ЪЧдкДДНЈИУШЮЮёЪБДЋЕнЕФаЮВЮ
* ЗЕ Ли жЕ: Юо
* ЫЕ Уї:Юо
*/
static void AppTaskCreate (void)
{
}
/**
* КЏЪ§ЙІФм: uCOSIIIФкКЫЖдЯѓДДНЈ
* ЪфШыВЮЪ§: Юо
* ЗЕ Ли жЕ: Юо
* ЫЕ Уї:Юо
*/
static void AppObjCreate (void)
{
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
3.дЫаааЇЙћ
аЇЙћвЛ:PA13ЖЫЕФLEDЩСЫИжмЦкЮЊ1s,PA3ЖЫЕФLEDЩСЫИжмЦкЮЊ3S

аЇЙћЖў:ДЎПкЗЂЫЭЪ§ОнЯдЪО,ЗЂЫЭжмЦкЮЊ2s

СљЁЂзмНс
ЭЈЙ§ДЫДЮЪЕбщ,бЇЯАСЫаТЕФжЊЪЖ,ІЬC/OSЖрШЮЮёВйзїЯЕЭГ,ЭЈЙ§ИУШЮЮёЯЕЭГПЩвдЬэМгЖрИіШЮЮёЭЌЪБНјаадЫаа,ВЂЧвЪЧвЛжжЪЕЪБЕФВйзїЯЕЭГ,дкдРДSTM32ЕФЛљДЁЩЯ,НјвЛВНЬэМгШЮЮё,ОЭПЩвдвЛЦ№жДааСЫ,ПДЦ№РДЗЧГЃПсьХ,ЖјЧвІЬC/OSЕФНсЙЙКмМђНр,ДњТывВКмЧхЮњ,ВЛЙ§дкЪЕМЪВйзїЕФЪБКђашвЊНјааДњТыЕФвЦжВБШНЯЗБЫіЁЃДЫДЮЪЕбщжЛЪЧбЇЯАСЫвЛЕуЦЄУЋ,ЯЃЭћдквдКѓЕФЩюШыбЇЯАжаФмЭЈЙ§ІЬC/OSзіГіИќЖрЕФаЇЙћЁЃ
ВЮПМзЪСЯ: STM32F103C8T6вЦжВuCOSЛљгкHALПт
STM32F103C8T6вЦжВuC/OS-IIIЛљгкHALПтГЌЭъећЯъЯИЙ§ГЬ