大家好,我是痞子衡,是正经搞技术的痞子。今天痞子衡给大家介绍的是i.MXRT1xxx的系统中断延迟时间。
在 《Cortex-M系统中断延迟及其测量方法简介》 一文里,痞子衡介绍了 Cortex-M 中断延迟的基本概念及一种用 GPIO 模块来测量中断延迟时间的方法,今天我们就在 i.MXRT1xxx 系列芯片上用这种方法实测一下中断延迟:
一、官方指标
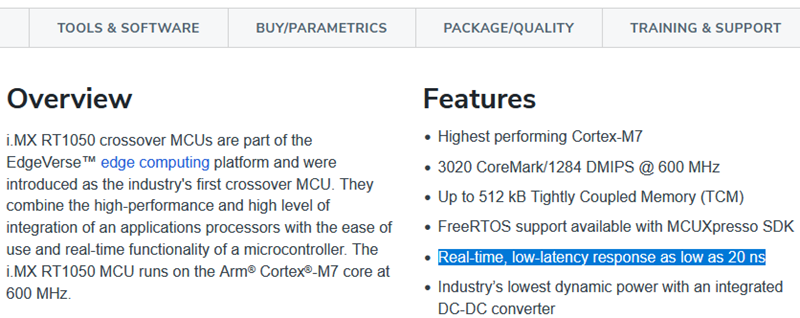
恩智浦 i.MXRT1xxx 系列目前有很多型号,都是基于 Cortex-M7 内核,主频从 500MHz 到 1GHz 不等。拿该系列第一款型号 i.MXRT1050 来说,在其官方主页可以看到其标称中断延迟时间低至 20ns。
在 《Cortex-M系统中断延迟》 一文第一小节里我们知道 Cortex-M7 的标准中断延迟是 12 - 14 个内核时钟周期,i.MXRT1050 主频是 600MHz ,理论计算可得 (1s / 600MHz) * 12 = 20ns,所以 i.MXRT1050 上这 20ns 的中断延迟是符合 ARM 标准的。
二、测试代码
现在我们在芯片上实测一下,痞子衡把 i.MXRT1011/1021/1052/1062/1176 这五个型号均测了一遍,测试代码可以基于其各自 SDK 包。
以 i.MXRT1052 为例,选用 \SDK_2.10.0_EVKB-IMXRT1050\boards\evkbimxrt1050\driver_examples\gpio\input_interrupt 例程为模板(注意选择 debug build,即代码链接在 TCM 里,满足零等待内存的测试需求),按 《Cortex-M系统中断延迟》 一文第二小节设计思想修改主函数如下(关于 GPIO 中断使用可以参考 《以i.MXRT1xxx的GPIO模块为例谈谈中断处理函数(IRQHandler)的标准流程》 一文):
- Note1: 为了结果的准确性,痞子衡同时测试了多个不同类型的 GPIO 中断,因为部分 i.MXRT 型号中包含普通 GPIO 和 HSGPIO,并且有些 GPIO 事件既可以触发 Combined 型中断,也可以触发独立的中断。
- Note2: 输出信号用的 GPIO 类型对于本次测试不重要,无论选择普通 GPIO 还是 HSGPIO 去翻转,其翻转时长不影响最终测试结果。
uint32_t s_pin_low = 0x000000;
uint32_t s_pin_high = 0x800000;
// User Button SW8 - Pin4 in RT1050-EVKB
void GPIO5_Combined_0_15_IRQHandler(void)
{
GPIO2->DR = s_pin_low;
GPIO2->DR = s_pin_high;
GPIO_PortClearInterruptFlags(GPIO5, 1U << 0);
__DSB();
}
void init_gpio5_0(void)
{
gpio_pin_config_t din_config = {kGPIO_DigitalInput, 0, kGPIO_IntFallingEdge};
IOMUXC_SetPinMux(IOMUXC_SNVS_WAKEUP_GPIO5_IO00, 0U);
GPIO_PinInit(GPIO5, 0, &din_config);
NVIC_EnableIRQ(GPIO5_Combined_0_15_IRQn);
GPIO_PortEnableInterrupts(GPIO5, 1U << 0);
}
// Arduino Interface, J24-2 in RT1050-EVKB
void GPIO1_Combined_0_15_IRQHandler(void)
{
GPIO2->DR = s_pin_low;
GPIO2->DR = s_pin_high;
GPIO_PortClearInterruptFlags(GPIO1, 1U << 2);
__DSB();
}
void GPIO1_INT2_IRQHandler(void)
{
GPIO2->DR = s_pin_low;
GPIO2->DR = s_pin_high;
GPIO_PortClearInterruptFlags(GPIO1, 1U << 2);
__DSB();
}
void init_gpio1_2(void)
{
gpio_pin_config_t din_config = {kGPIO_DigitalInput, 0, kGPIO_IntFallingEdge};
IOMUXC_SetPinMux(IOMUXC_GPIO_AD_B0_02_GPIO1_IO02, 0U);
GPIO_PinInit(GPIO1, 2, &din_config);
NVIC_EnableIRQ(GPIO1_Combined_0_15_IRQn);
//NVIC_EnableIRQ(GPIO1_INT2_IRQn);
GPIO_PortEnableInterrupts(GPIO1, 1U << 2);
}
// TP26
void init_gpio2_23(void)
{
gpio_pin_config_t dout_config = {kGPIO_DigitalOutput, 0, kGPIO_NoIntmode};
IOMUXC_SetPinMux(IOMUXC_GPIO_B1_07_GPIO2_IO23, 0U);
IOMUXC_SetPinConfig(IOMUXC_GPIO_B1_07_GPIO2_IO23, 0x70F9U);
GPIO_PinInit(GPIO2, 23, &dout_config);
GPIO2->DR |= 0x800000;
}
int main(void)
{
BOARD_ConfigMPU();
BOARD_InitBootClocks();
CLOCK_EnableClock(kCLOCK_Iomuxc);
CLOCK_EnableClock(kCLOCK_IomuxcSnvs);
init_gpio5_0();
init_gpio1_2();
init_gpio2_23();
while (1);
}三、测试结果
现在我们来看 5 个 i.MXRT 型号的详细测试结果,根据测试结果,我们得出如下结论:
- 结论1: 不同类型 GPIO(普通GPIO/HSGPIO)或者不同类型的 GPIO 中断(Combined 型/独立型),其中断延迟结果几乎是一样的(但是 i.MXRT1170 除外)。
- 结论2: i.MXRT1020/1050 上测出的 GPIO 中断延迟接近 ARM 标准值,但是 i.MXRT1010/1060/1170 上测出的 GPIO 中断延迟大于 ARM 标准值(猜测是 GPIO 模块设计导致的延迟较大,并不是内核本身延迟大)。
- 结论3: 本次方法测出的 GPIO 中断延迟不是一个固定值,存在约 3 个内核时钟周期的波动(多次测量观测到),原因可能是 PAD 信号跳变与 NVIC IRQ 信号置起的同步时机差异。
3.1 实测i.MXRT1011
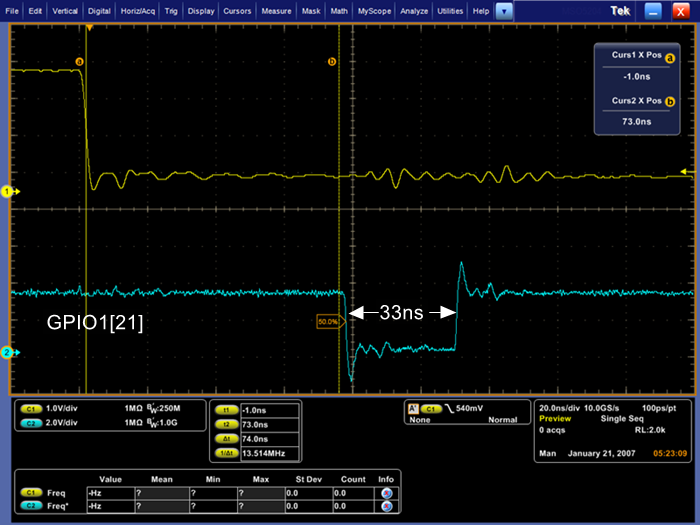
| 系统时钟配置 | PAD | GPIO | IRQ | t1 | t2 | td | 中断延迟时钟数 |
|---|---|---|---|---|---|---|---|
| Core: 500MHz IPG: 125MHz | GPIO_01 | GPIO1[1] | GPIO1_Combined_0_15_IRQn | 74 - 78ns | 33ns | 41 - 45ns | 20 - 23 cycles |
| GPIO2[1] | GPIO2_Combined_0_15_IRQn | ||||||
| GPIO_SD_05 | GPIO2[5] |
3.2 实测i.MXRT102x
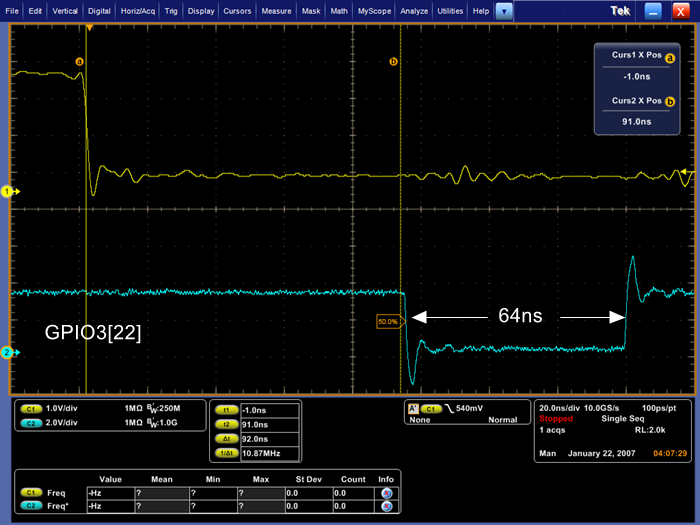
| 系统时钟配置 | PAD | GPIO | IRQ | t1 | t2 | td | 中断延迟时钟数 |
|---|---|---|---|---|---|---|---|
| Core: 500MHz IPG: 125MHz | GPIO_AD_B0_06 | GPIO1[6] | GPIO1_Combined_0_15_IRQn | 92 - 96ns | 64ns | 28 - 32ns | 14 - 16 cycles |
| GPIO1_INT6_IRQn | |||||||
| SNVS_WAKEUP | GPIO5[0] | GPIO5_Combined_0_15_IRQn |
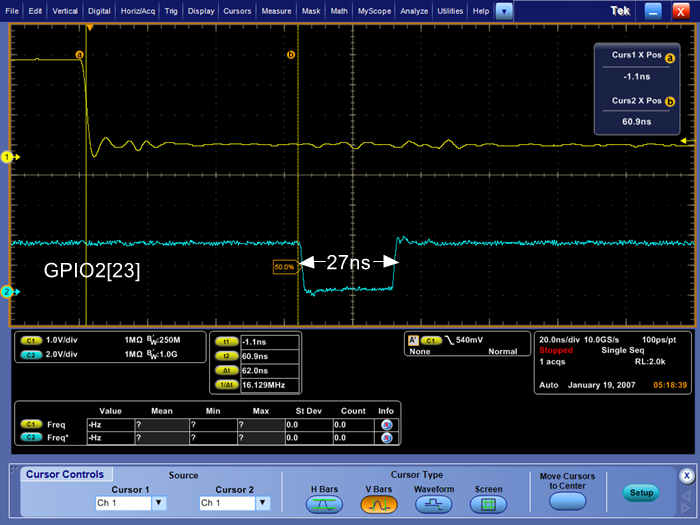
3.3 实测i.MXRT105x
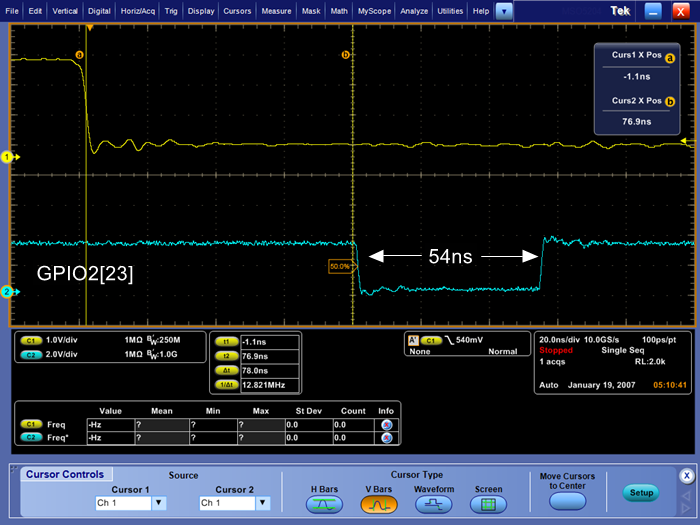
| 系统时钟配置 | PAD | GPIO | IRQ | t1 | t2 | td | 中断延迟时钟数 |
|---|---|---|---|---|---|---|---|
| Core: 600MHz IPG: 150MHz | GPIO_AD_B0_02 | GPIO1[2] | GPIO1_Combined_0_15_IRQn | 78 - 82ns | 54ns | 24 - 28ns | 14 - 17 cycles |
| GPIO1_INT2_IRQn | |||||||
| SNVS_WAKEUP | GPIO5[0] | GPIO5_Combined_0_15_IRQn |
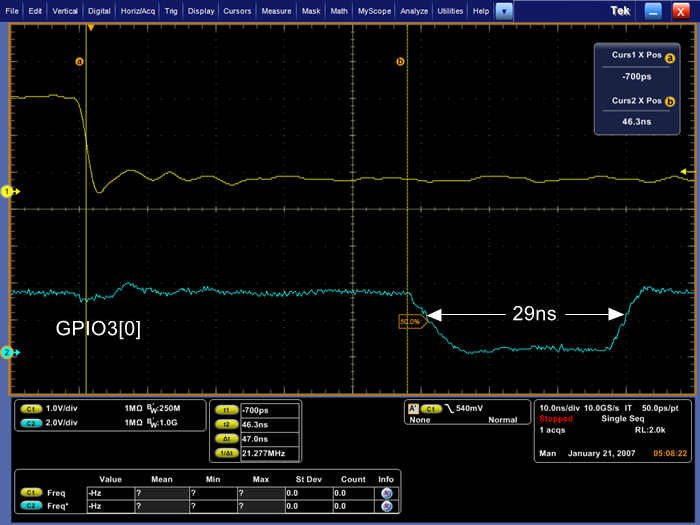
3.4 实测i.MXRT106x
| 系统时钟配置 | PAD | GPIO | IRQ | t1 | t2 | td | 中断延迟时钟数 |
|---|---|---|---|---|---|---|---|
| Core: 600MHz IPG: 150MHz | GPIO_AD_B0_02 | GPIO1[2] | GPIO1_Combined_0_15_IRQn | 62 - 66ns | 27ns | 35 - 39ns | 21 - 24 cycles |
| GPIO1_INT2_IRQn | |||||||
| GPIO6[2] | GPIO6_7_8_9_IRQn | ||||||
| SNVS_WAKEUP | GPIO5[0] | GPIO5_Combined_0_15_IRQn |
3.5 实测i.MXRT117x
| 系统时钟配置 | PAD | GPIO | IRQ | t1 | t2 | td | 中断延迟时钟数 |
|---|---|---|---|---|---|---|---|
| Core: 996MHz BUS: 240MHz | GPIO_AD_01 | GPIO2[31] | GPIO2_Combined_16_31_IRQn | 52 - 54ns | 29ns | 23 - 25ns | 23 - 25 cycles |
| CM7_GPIO2[31] | CM7_GPIO2_3_IRQn | ||||||
| WAKEUP_DIG | GPIO13[0] | GPIO13_Combined_0_31_IRQn | 47 - 50ns | 18 - 21ns | 18 - 21 cycles |
至此,i.MXRT1xxx的系统中断延迟时间痞子衡便介绍完毕了,掌声在哪里~~~
欢迎订阅
文章会同时发布到我的 博客园主页、CSDN主页、知乎主页、微信公众号 平台上。
微信搜索"痞子衡嵌入式"或者扫描下面二维码,就可以在手机上第一时间看了哦。
