一、建立STM32F103C8T6HAL库
1.环境配置
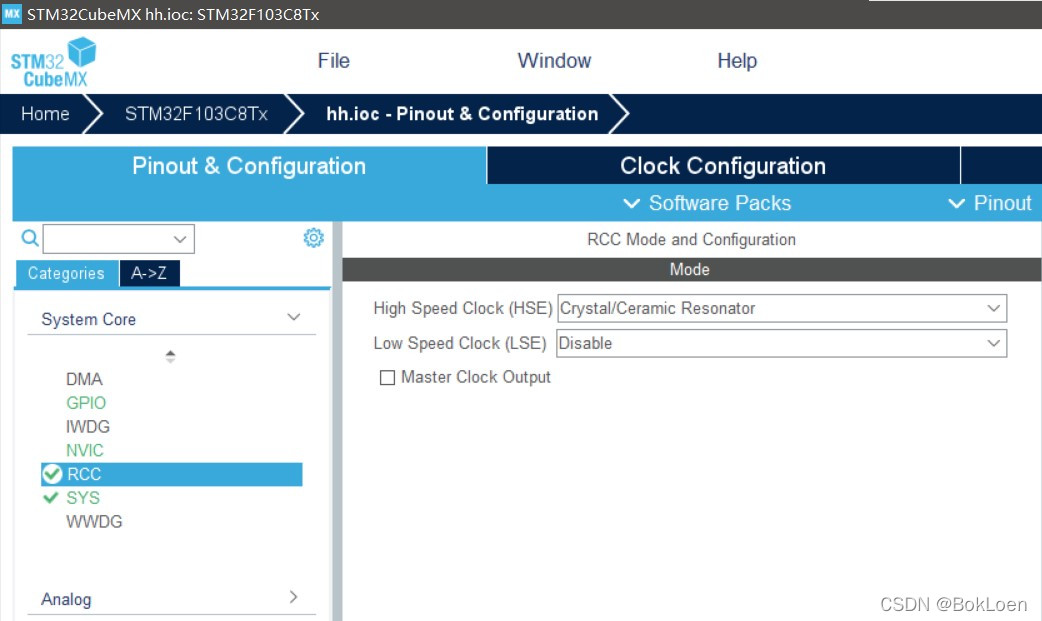
首先我们进行RCC的配置,如图所示:
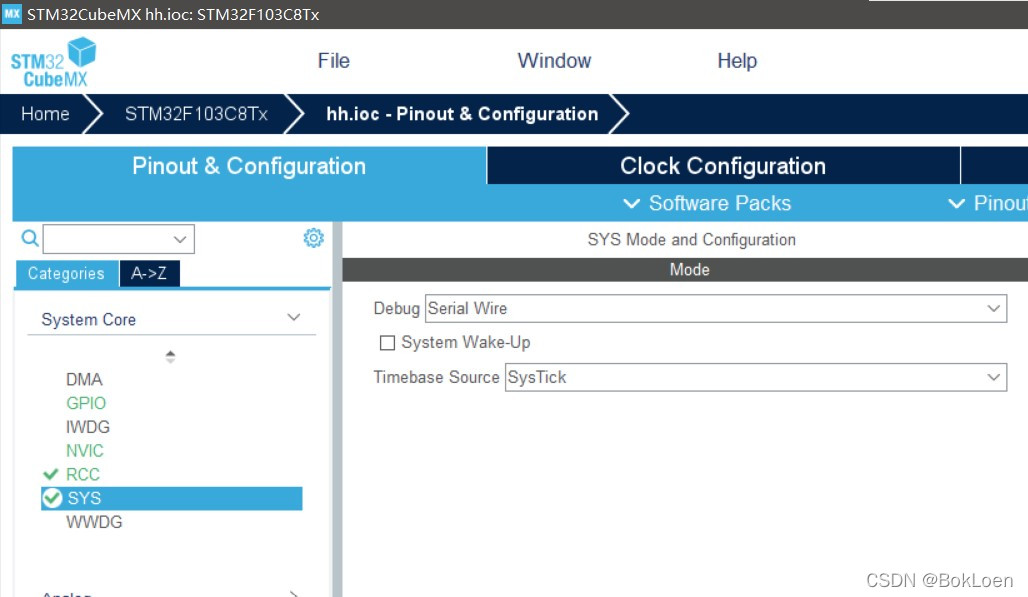
然后我们进行SYS的配置,如图所示:
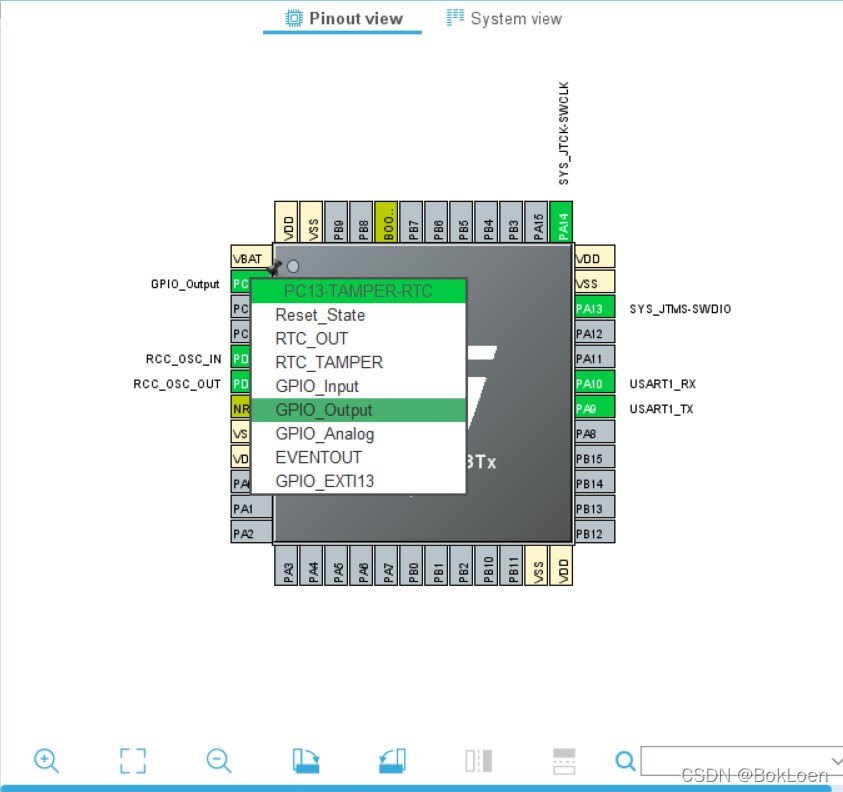
然后我们设置PC13为GPIO_Output,如图所示:
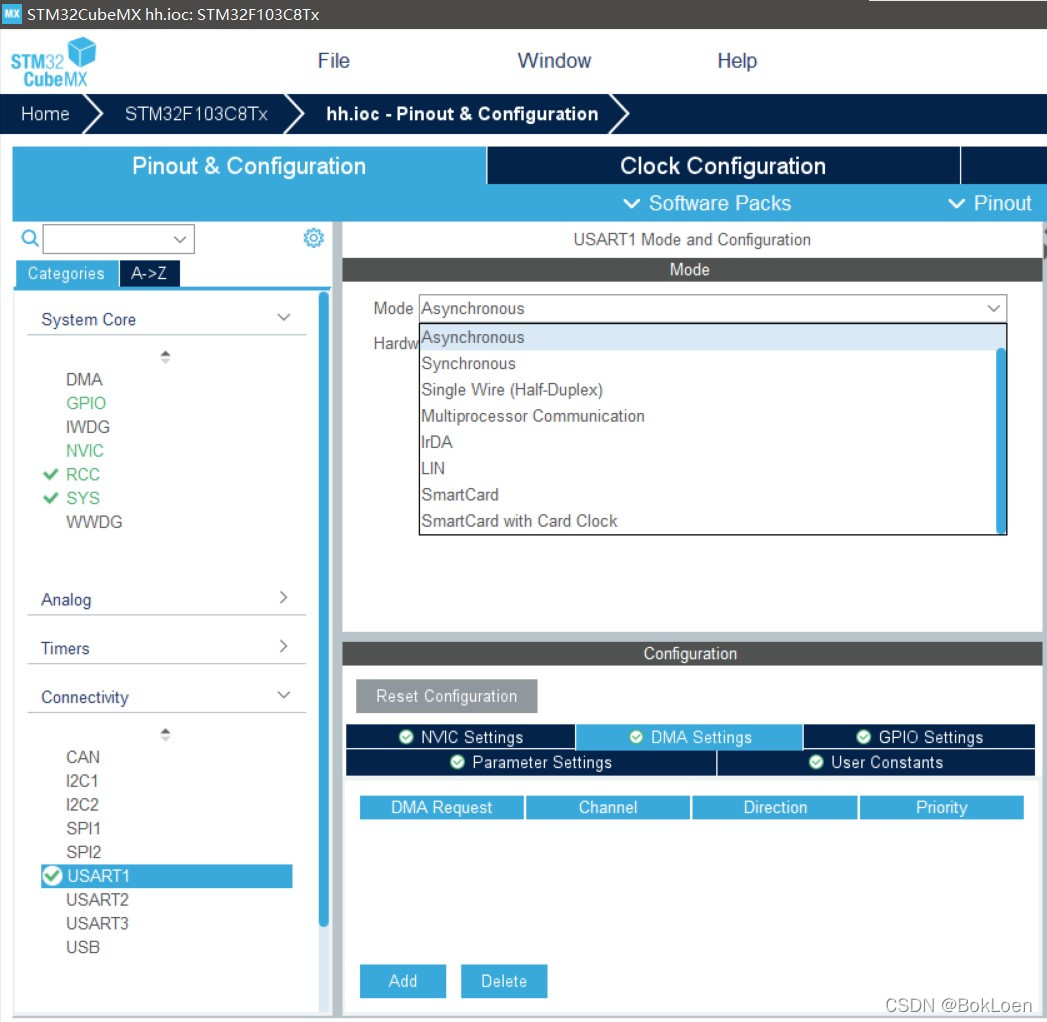
然后我们进行串口设置:
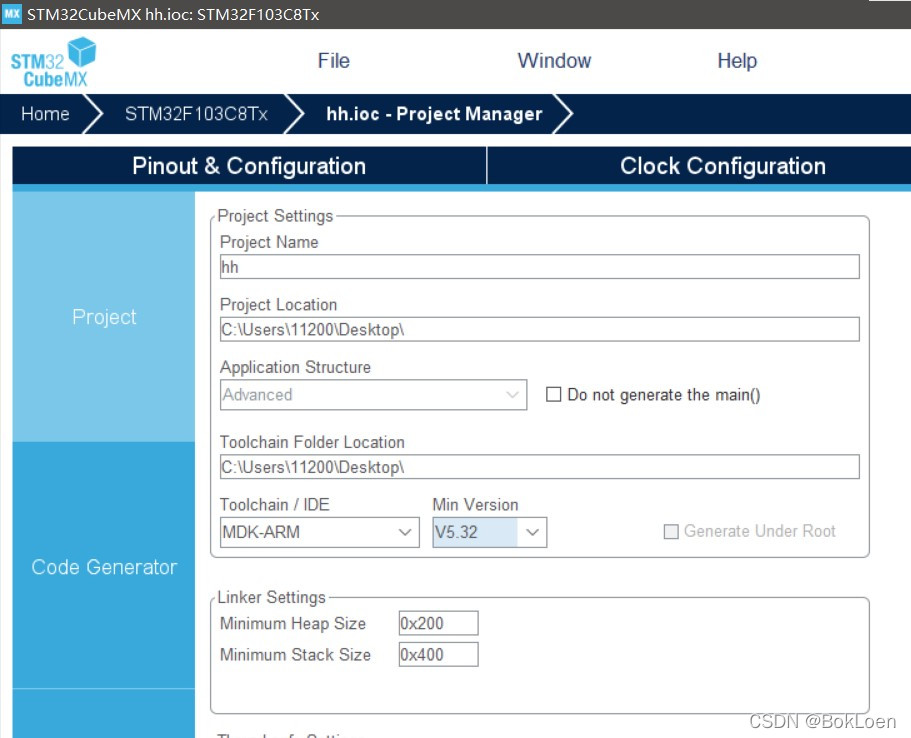
之后我们进行工程设置:
首先把toolchain/ide设置成MDK-ARM,然后把Min version 设置成V5.32
之后我们把Code generator 下的generate files中的第一条勾上
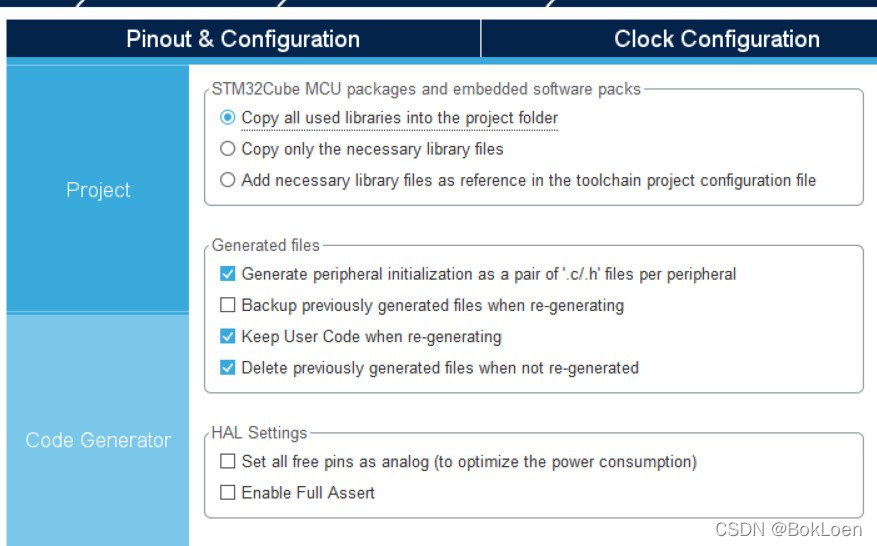
之后我们点击generate code并打开代码

二、下载uCOSIII源码
我们可以在官网下载源码,地址如下:
官网下载地址:http://micrium.com/downloadcenter/
我们也可以在网盘下载源码:
https://pan.baidu.com/s/10RqsDRecbmVteWmDv2oUNQ
提取码:1234
下载后如图所示:
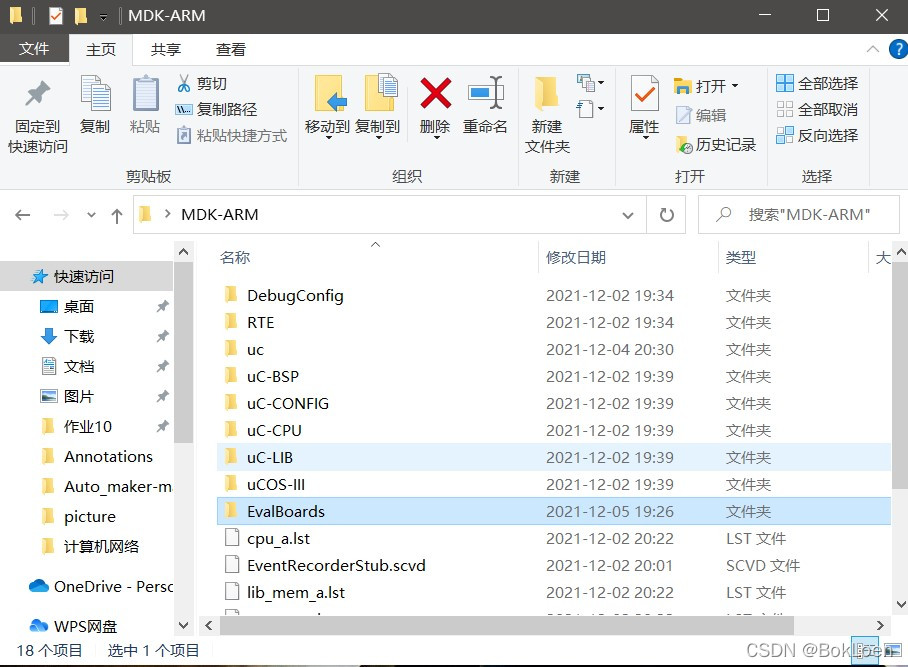
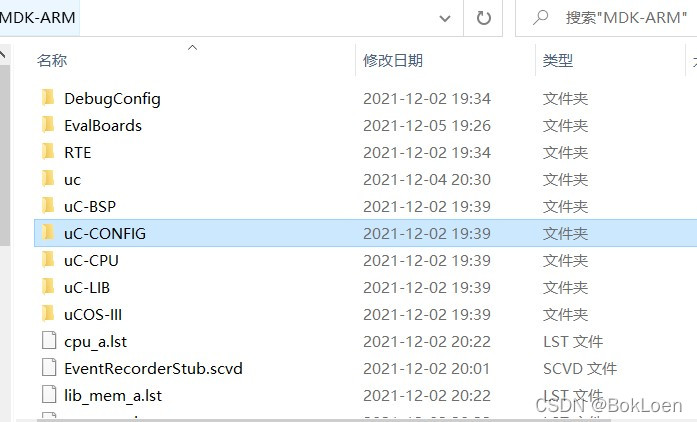
在下载好 uC/OS-III 源码文件之后,我们还需要在下面所示的文件夹里新建两个文件夹 uC-BSP 和 uC-CONFIG
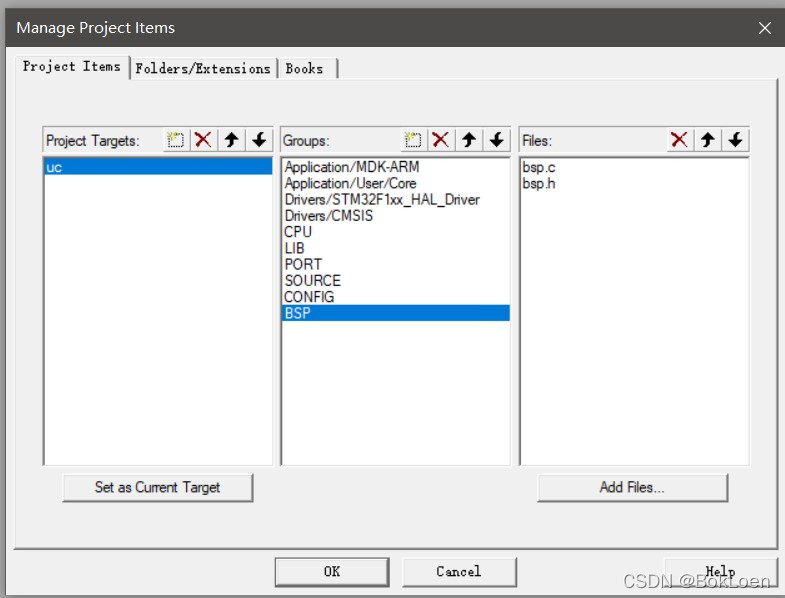
之后我们还需要在 uC-BSP 文件夹中新建 bsp.c 和 bsp.h 空文件
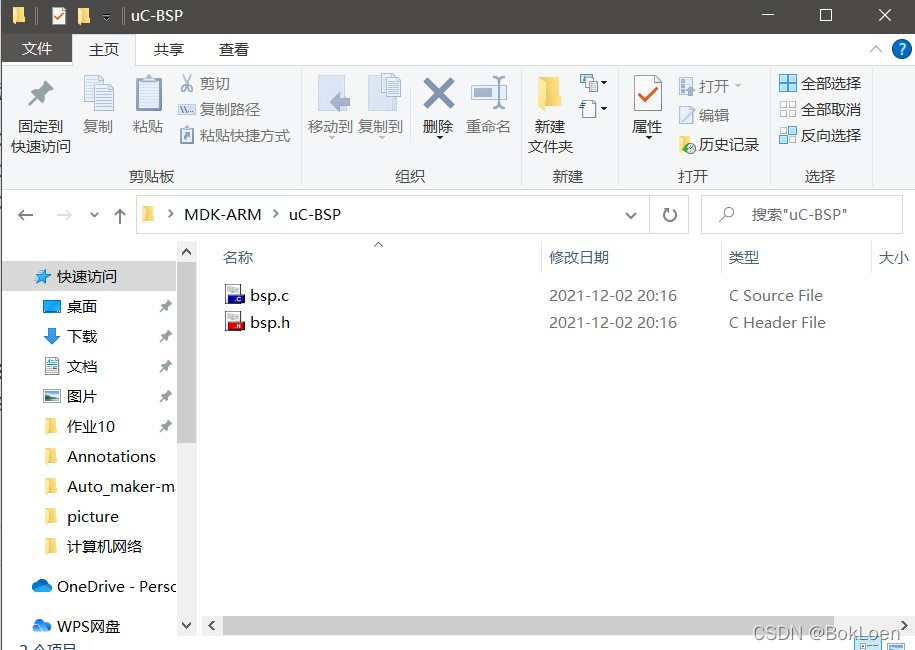
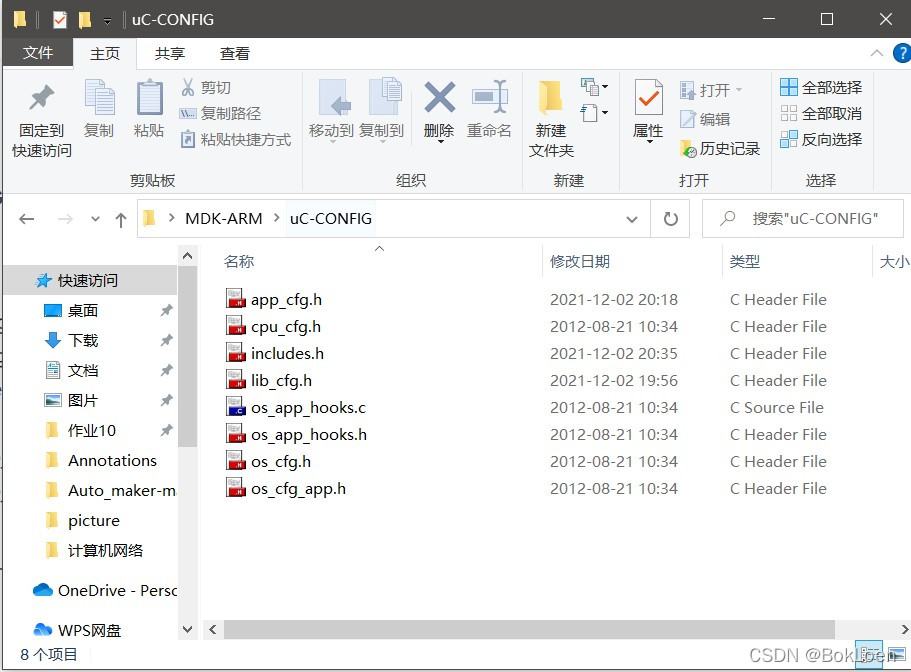
还需要为 uC-CONFIG 文件夹添加文件
三、给 HAL 库工程移植文件
1.配置 uCOS 相关文件
我们首先将 uCOS 相关文件(共 5 个)复制到 HAL 工程的 MDK-ARM 文件夹下
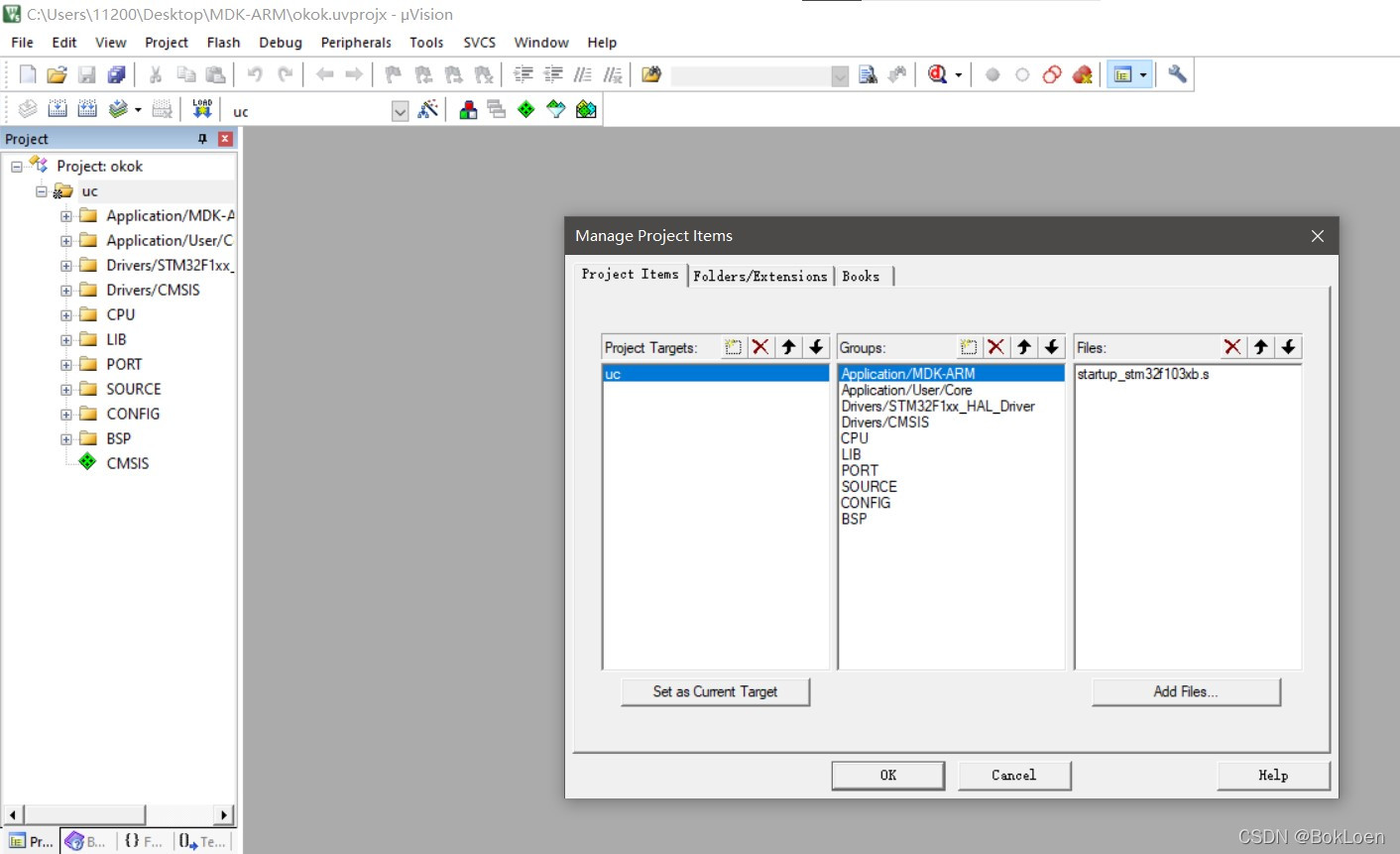
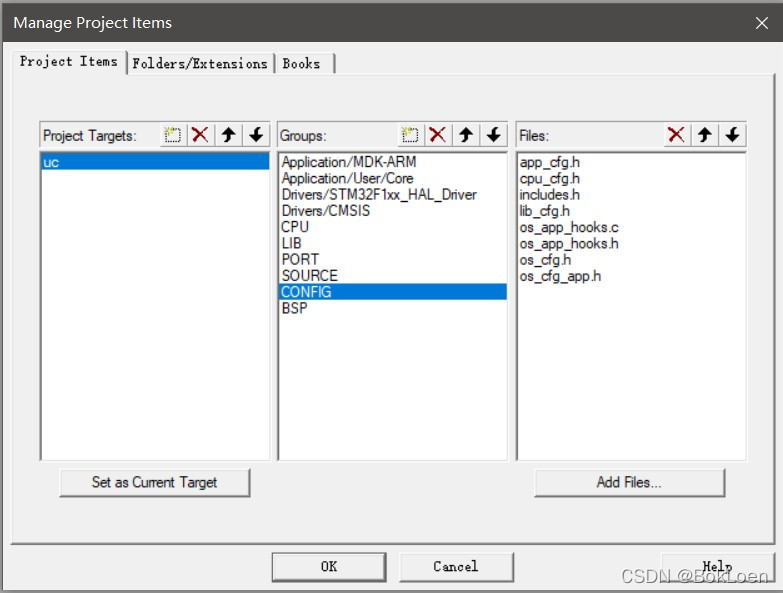
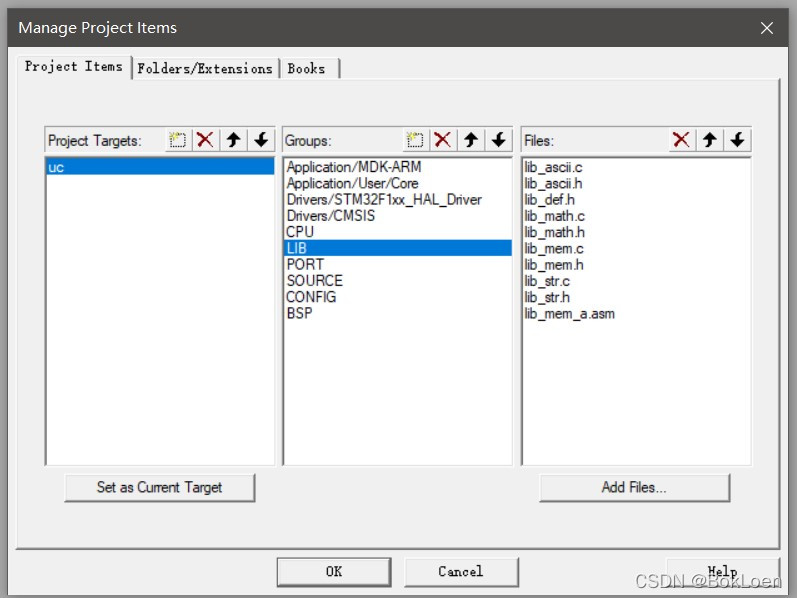
之后我们打开 keil5 工程,点击 Manage Project Items 添加项目
在BSP中选择以下两个文件:
也把CONFIG里的文件选上:
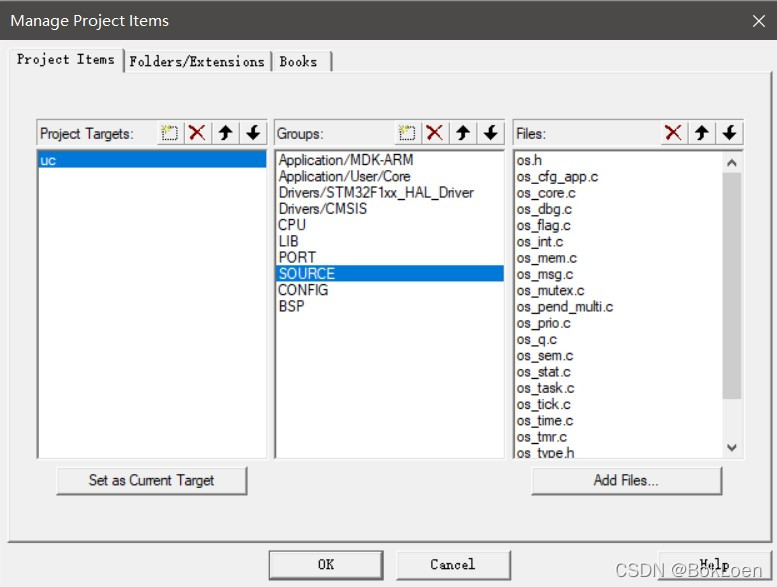
然后在SOURCE里添加20个文件路径:
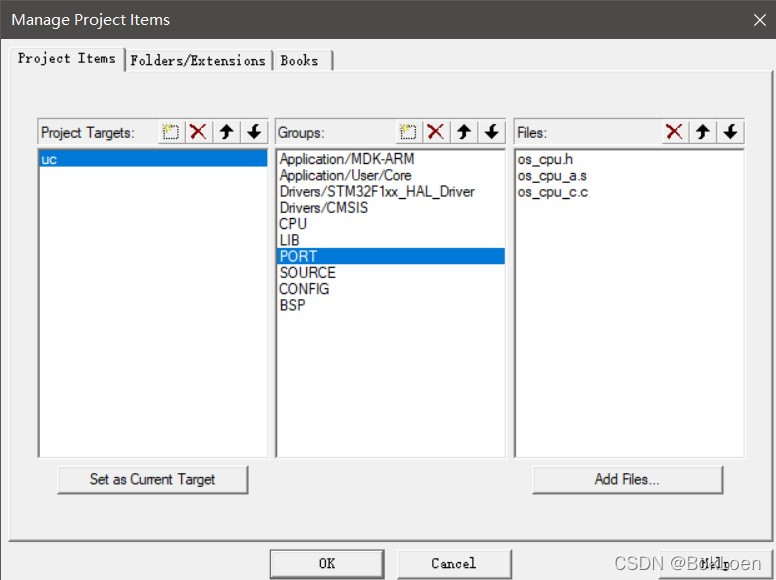
PORT也同上操作:
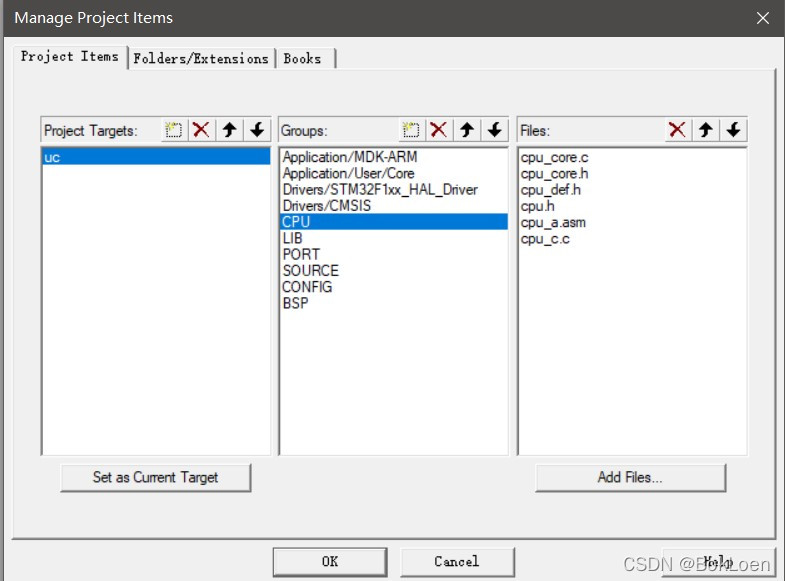
在CPU分组中添加uC-CPU文件夹里的文件
在Lib分组中加入lib的文件:
2.代码修改
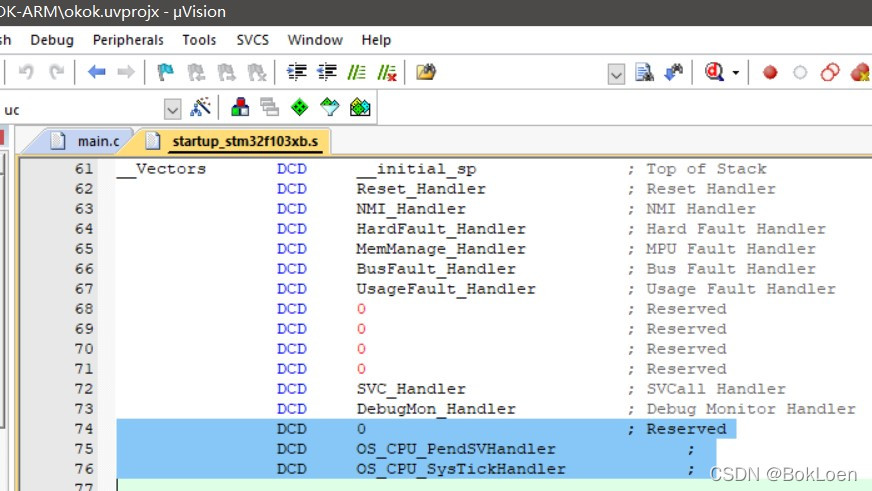
将启动文件里这两处的PendSV_Handler和Systick_Handler改为OS_CPU_PendSVHandler和OS_CPU_SysTickHandler
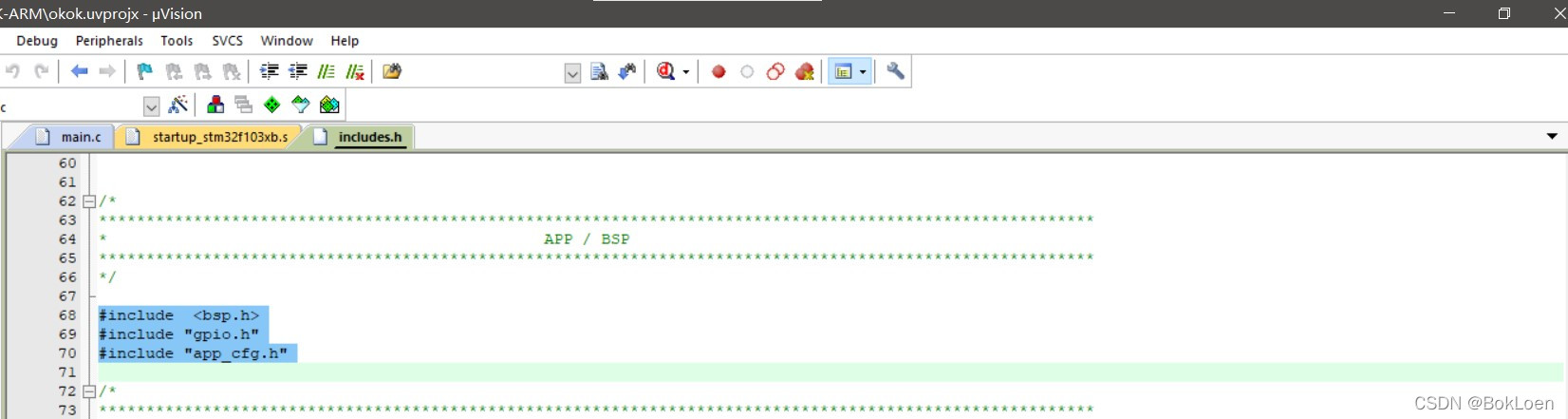
之后我们在#include <bsp.h>处添加
#include “gpio.h”
#include “app_cfg.h”
然后将#include <stm32f10x_lib.h> 改为
#include “stm32f1xx_hal.h”

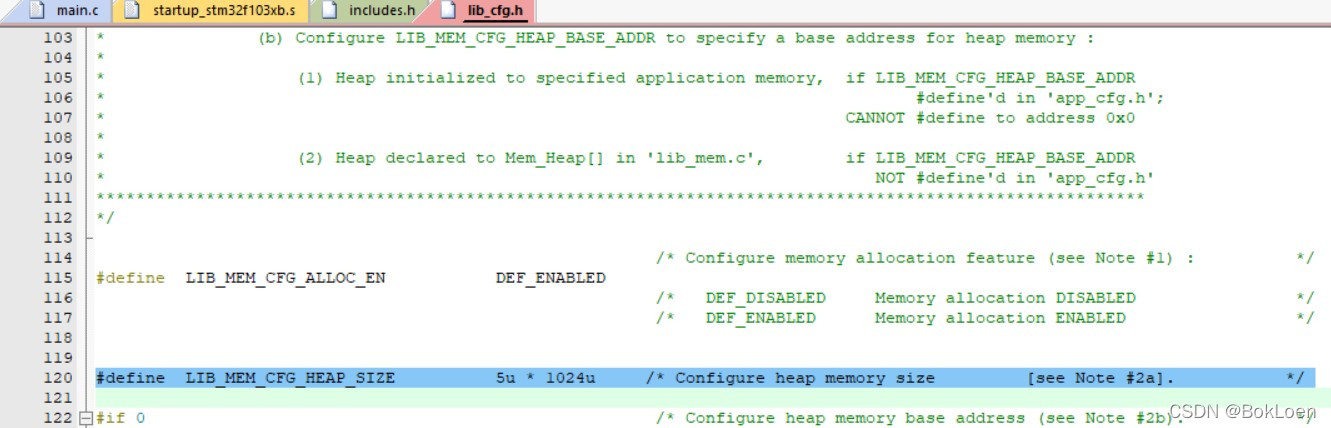
然后打开lib_cfg.h中修改此行变成5u
之后我们需要在main.c文件中的代码进行修改,这是修改后的代码:
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "gpio.h"
#include "usart.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <includes.h>
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE BEGIN 1 */
int fputc(int ch,FILE *f){
HAL_UART_Transmit(&huart1,(uint8_t *)&ch,1,0xffff);
return ch;
}
/* USER CODE END 1 */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* è???ó??è?? */
#define START_TASK_PRIO 3
#define LED0_TASK_PRIO 4
#define MSG_TASK_PRIO 5
#define LED1_TASK_PRIO 6
/* è???????′óD? */
#define START_STK_SIZE 96
#define LED0_STK_SIZE 64
#define MSG_STK_SIZE 64
#define LED1_STK_SIZE 64
/* è????? */
CPU_STK START_TASK_STK[START_STK_SIZE];
CPU_STK LED0_TASK_STK[LED0_STK_SIZE];
CPU_STK MSG_TASK_STK[MSG_STK_SIZE];
CPU_STK LED1_TASK_STK[LED1_STK_SIZE];
/* è????????é */
OS_TCB StartTaskTCB;
OS_TCB Led0TaskTCB;
OS_TCB MsgTaskTCB;
OS_TCB Led1TaskTCB;
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* è???oˉêy?¨ò? */
void start_task(void *p_arg);
static void AppTaskCreate(void);
static void AppObjCreate(void);
static void led_pc13(void *p_arg);
static void send_msg(void *p_arg);
static void led_pa3(void *p_arg);
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
OS_ERR err;
OSInit(&err);
HAL_Init();
SystemClock_Config();
//MX_GPIO_Init(); ?a???úBSPμ?3?ê??ˉà?ò2?á3?ê??ˉ
MX_USART1_UART_Init();
/* ′′?¨è??? */
OSTaskCreate((OS_TCB *)&StartTaskTCB, /* Create the start task */
(CPU_CHAR *)"start task",
(OS_TASK_PTR ) start_task,
(void *) 0,
(OS_PRIO ) START_TASK_PRIO,
(CPU_STK *)&START_TASK_STK[0],
(CPU_STK_SIZE) START_STK_SIZE/10,
(CPU_STK_SIZE) START_STK_SIZE,
(OS_MSG_QTY ) 0,
(OS_TICK ) 0,
(void *) 0,
(OS_OPT )(OS_OPT_TASK_STK_CHK | OS_OPT_TASK_STK_CLR),
(OS_ERR *)&err);
/* ???ˉ?àè????μí3£?????è¨????uC/OS-III */
OSStart(&err); /* Start multitasking (i.e. give control to uC/OS-III). */
}
void start_task(void *p_arg)
{
OS_ERR err;
CPU_SR_ALLOC();
p_arg = p_arg;
/* YangJie add 2021.05.20*/
BSP_Init(); /* Initialize BSP functions */
//CPU_Init();
//Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); //í3??è???
#endif
#ifdef CPU_CFG_INT_DIS_MEAS_EN //è?1?ê1?üá?2aá??D??1?±?ê±??
CPU_IntDisMeasMaxCurReset();
#endif
#if OS_CFG_SCHED_ROUND_ROBIN_EN //μ±ê1ó?ê±??????×aμ?ê±oò
//ê1?üê±??????×aμ÷?è1|?ü,ê±????3¤?è?a1???μí3ê±?ó?ú??£??è1*5=5ms
OSSchedRoundRobinCfg(DEF_ENABLED,1,&err);
#endif
OS_CRITICAL_ENTER(); //??è?áù????
/* ′′?¨LED0è??? */
OSTaskCreate((OS_TCB * )&Led0TaskTCB,
(CPU_CHAR * )"led_pc13",
(OS_TASK_PTR )led_pc13,
(void * )0,
(OS_PRIO )LED0_TASK_PRIO,
(CPU_STK * )&LED0_TASK_STK[0],
(CPU_STK_SIZE)LED0_STK_SIZE/10,
(CPU_STK_SIZE)LED0_STK_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )0,
(void * )0,
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,
(OS_ERR * )&err);
/* ′′?¨LED1è??? */
OSTaskCreate((OS_TCB * )&Led1TaskTCB,
(CPU_CHAR * )"led_pa3",
(OS_TASK_PTR )led_pa3,
(void * )0,
(OS_PRIO )LED1_TASK_PRIO,
(CPU_STK * )&LED1_TASK_STK[0],
(CPU_STK_SIZE)LED1_STK_SIZE/10,
(CPU_STK_SIZE)LED1_STK_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )0,
(void * )0,
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,
(OS_ERR * )&err);
/* ′′?¨MSGè??? */
OSTaskCreate((OS_TCB * )&MsgTaskTCB,
(CPU_CHAR * )"send_msg",
(OS_TASK_PTR )send_msg,
(void * )0,
(OS_PRIO )MSG_TASK_PRIO,
(CPU_STK * )&MSG_TASK_STK[0],
(CPU_STK_SIZE)MSG_STK_SIZE/10,
(CPU_STK_SIZE)MSG_STK_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )0,
(void * )0,
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,
(OS_ERR * )&err);
OS_TaskSuspend((OS_TCB*)&StartTaskTCB,&err); //1ò?e?aê?è???
OS_CRITICAL_EXIT(); //??è?áù????
}
/**
* oˉêy1|?ü: ???ˉè???oˉêyì??£
* ê?è?2?êy: p_arg ê??ú′′?¨??è???ê±′?μYμ?D?2?
* ・μ ?? ?μ: ?T
* ?μ ?÷£o?T
*/
static void led_pc13 (void *p_arg)
{
OS_ERR err;
(void)p_arg;
BSP_Init(); /* Initialize BSP functions */
CPU_Init();
Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); /* Compute CPU capacity with no task running */
#endif
CPU_IntDisMeasMaxCurReset();
AppTaskCreate(); /* Create Application Tasks */
AppObjCreate(); /* Create Application Objects */
while (DEF_TRUE)
{
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_13,GPIO_PIN_RESET);
OSTimeDlyHMSM(0, 0, 1, 0,OS_OPT_TIME_HMSM_STRICT,&err);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_13,GPIO_PIN_SET);
OSTimeDlyHMSM(0, 0, 1, 0,OS_OPT_TIME_HMSM_STRICT,&err);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
static void led_pa3 (void *p_arg)
{
OS_ERR err;
(void)p_arg;
BSP_Init(); /* Initialize BSP functions */
CPU_Init();
Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); /* Compute CPU capacity with no task running */
#endif
CPU_IntDisMeasMaxCurReset();
AppTaskCreate(); /* Create Application Tasks */
AppObjCreate(); /* Create Application Objects */
while (DEF_TRUE)
{
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_3,GPIO_PIN_RESET);
OSTimeDlyHMSM(0, 0, 3, 0,OS_OPT_TIME_HMSM_STRICT,&err);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_3,GPIO_PIN_SET);
OSTimeDlyHMSM(0, 0, 3, 0,OS_OPT_TIME_HMSM_STRICT,&err);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
static void send_msg (void *p_arg)
{
OS_ERR err;
(void)p_arg;
BSP_Init(); /* Initialize BSP functions */
CPU_Init();
Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); /* Compute CPU capacity with no task running */
#endif
CPU_IntDisMeasMaxCurReset();
AppTaskCreate(); /* Create Application Tasks */
AppObjCreate(); /* Create Application Objects */
while (DEF_TRUE)
{
printf("hello uc/OS! ??ó-à′μ?RTOS?àè????・?3£? \r\n");
OSTimeDlyHMSM(0, 0, 2, 0,OS_OPT_TIME_HMSM_STRICT,&err);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/* USER CODE BEGIN 4 */
/**
* oˉêy1|?ü: ′′?¨ó|ó?è???
* ê?è?2?êy: p_arg ê??ú′′?¨??è???ê±′?μYμ?D?2?
* ・μ ?? ?μ: ?T
* ?μ ?÷£o?T
*/
static void AppTaskCreate (void)
{
}
/**
* oˉêy1|?ü: uCOSIII?úo????ó′′?¨
* ê?è?2?êy: ?T
* ・μ ?? ?μ: ?T
* ?μ ?÷£o?T
*/
static void AppObjCreate (void)
{
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
之后我们再进行参数的配置,勾选上此处的Use MicroLIB

四、实验效果
