STM32基于HAL库移植uC/OS-III
配置HAL库
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-klgb93b6-1638697968544)(C:\Users\无\AppData\Roaming\Typora\typora-user-images\image-20211205145146713.png)]](https://img-blog.csdnimg.cn/7c0ada4658b54b868cc49a2cc260cb59.png)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Z3i7V6cs-1638697968546)(C:\Users\无\AppData\Roaming\Typora\typora-user-images\image-20211205145212230.png)]](https://img-blog.csdnimg.cn/436e3384ef7549ec9b0342db74135c86.png)
将pc13设置为out
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-NTZzRpok-1638697968546)(C:\Users\无\AppData\Roaming\Typora\typora-user-images\image-20211205145308933.png)]](https://img-blog.csdnimg.cn/7dce7b9897b84de3aa9ffb8716a2582e.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBAZ2ppc2g=,size_15,color_FFFFFF,t_70,g_se,x_16)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-wyPl8ct6-1638697968547)(C:\Users\无\AppData\Roaming\Typora\typora-user-images\image-20211205145328016.png)]](https://img-blog.csdnimg.cn/54bea7e0696f458cb3aec8ad336c1ab3.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBAZ2ppc2g=,size_20,color_FFFFFF,t_70,g_se,x_16)
配置文件
创建OSIII文件,放入下载的文件
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-yrsIRIoL-1638697968548)(C:\Users\无\AppData\Roaming\Typora\typora-user-images\image-20211205145505925.png)]](https://img-blog.csdnimg.cn/4fc2bf89b0624831b72a2ac099c86cf6.png)
在scr文件下创建OS文件,并放入文件,同时创建3个空白文件bsp.c、bsp.h、app.h
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-dv7Jb9tC-1638697968549)(C:\Users\无\AppData\Roaming\Typora\typora-user-images\image-20211205145617897.png)]](https://img-blog.csdnimg.cn/0068c868fe6d43cdbd5c5bfb62706789.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBAZ2ppc2g=,size_20,color_FFFFFF,t_70,g_se,x_16)
调整工程
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-ryzIv4KZ-1638697968549)(C:\Users\无\AppData\Roaming\Typora\typora-user-images\image-20211205150045326.png)]](https://img-blog.csdnimg.cn/84a22bbfb3c84fc89aaef3550199a30c.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBAZ2ppc2g=,size_20,color_FFFFFF,t_70,g_se,x_16)
将Src/OS中的bsp.c 和 bsp.h文件添加至 bsp 组中,将 app.c 添加进 Application/User/Core 组中:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-0pRNopA4-1638697968550)(C:\Users\无\AppData\Roaming\Typora\typora-user-images\image-20211205150221692.png)]](https://img-blog.csdnimg.cn/690c0f8266b644169550bee54c5e017c.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBAZ2ppc2g=,size_20,color_FFFFFF,t_70,g_se,x_16)
将OSIII/uC-CPU中的cpu_core.c、cpu_core.h、cpu_def.h添加进uCOSIII_CPU组中,同时将OSIII/uC-CPU/ARM-Cortex-M3/RealView中的三个文件添加到该组:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-3BpMb0DK-1638697968551)(C:\Users\无\AppData\Roaming\Typora\typora-user-images\image-20211205150247402.png)]](https://img-blog.csdnimg.cn/ca16e42133d74f0fa84467b1407937f9.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBAZ2ppc2g=,size_20,color_FFFFFF,t_70,g_se,x_16)
将OSIII/uC-LIB中的9个文件添加到uCOSIII-LIB组中,同时将OSIII/uC-LIB/Ports/ARM-Cortex-M3/Realview中的lib_mem_a.asm添加到该组中:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-qxsFQpJ2-1638697968551)(C:\Users\无\AppData\Roaming\Typora\typora-user-images\image-20211205150427417.png)]](https://img-blog.csdnimg.cn/5d5c52c6b02b439fad034ff297181b06.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBAZ2ppc2g=,size_20,color_FFFFFF,t_70,g_se,x_16)
将OSIII/UcosIII/Ports/ARM-Cortex-M3/Generic/RealView中的3个文件添加的uCOSIII_Ports组中:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-5Yo0QhnX-1638697968552)(C:\Users\无\AppData\Roaming\Typora\typora-user-images\image-20211205150513922.png)]](https://img-blog.csdnimg.cn/a3dc2d22c31f42329105e6a4675986b8.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBAZ2ppc2g=,size_20,color_FFFFFF,t_70,g_se,x_16)
将OSIII/UcosIII/Source中的20个文件添加到uCOSIII_Source组中:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-xI1CXFaS-1638697968552)(C:\Users\无\AppData\Roaming\Typora\typora-user-images\image-20211205150612927.png)]](https://img-blog.csdnimg.cn/5247883975a64553950cab1a0bdcdaa8.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBAZ2ppc2g=,size_20,color_FFFFFF,t_70,g_se,x_16)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-pt3iQTQy-1638697968553)(C:\Users\无\AppData\Roaming\Typora\typora-user-images\image-20211205150626846.png)]](https://img-blog.csdnimg.cn/d697bbf3eb3144199481d6ce2e7c3adf.png)
将Core/Src/OS中的以下图中的8个文件添加到OS_cfg组中:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-k24Nz1Yr-1638697968553)(C:\Users\无\AppData\Roaming\Typora\typora-user-images\image-20211205150639163.png)]](https://img-blog.csdnimg.cn/7831f136af564ac88f8df5340116e867.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBAZ2ppc2g=,size_20,color_FFFFFF,t_70,g_se,x_16)
添加路径
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-GOu2T59v-1638697968554)(C:\Users\无\AppData\Roaming\Typora\typora-user-images\image-20211205150731811.png)]](https://img-blog.csdnimg.cn/8ead80049012417cb6b153813e14217c.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBAZ2ppc2g=,size_20,color_FFFFFF,t_70,g_se,x_16)
修改代码
位置
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Q5RE4H4j-1638697968554)(C:\Users\无\AppData\Roaming\Typora\typora-user-images\image-20211205150837760.png)]](https://img-blog.csdnimg.cn/78a0e7dca3a74d59b305f1b6123e0171.png)
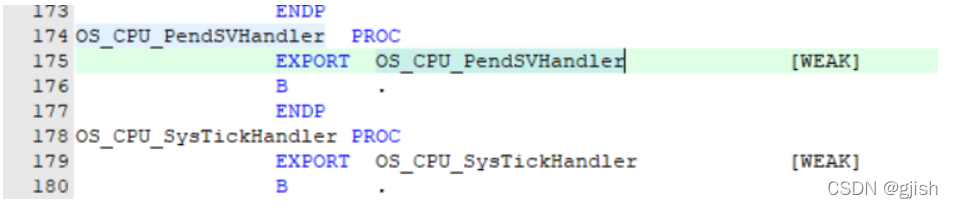
将启动文件下图中的PendSV_Handler和Systick_Handler改为OS_CPU_PendSVHandler和OS_CPU_SysTickHandler:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-gbM3B3AH-1638697968554)(C:\Users\无\AppData\Roaming\Typora\typora-user-images\image-20211205150905517.png)]](https://img-blog.csdnimg.cn/10a6fe7cf75b4cad80662e35ce666262.png)
位置
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-oEhPmI0X-1638697968556)(C:\Users\无\AppData\Roaming\Typora\typora-user-images\image-20211205151003358.png)]](https://img-blog.csdnimg.cn/2d27bb139aa04daf94de5f2a5bdf8e10.png)
#define APP_CFG_SERIAL_EN DEF_ENABLED 改为 #define APP_CFG_SERIAL_EN DEF_DISABLED;
#define APP_TRACE BSP_Ser_Printf 改为 #define APP_TRACE (void)。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-GBOlptWW-1638697968556)(C:\Users\无\AppData\Roaming\Typora\typora-user-images\image-20211205151130953.png)]](https://img-blog.csdnimg.cn/5482b661ad744277b73b618fb37c4f79.png)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-lVAZIK3Z-1638697968556)(C:\Users\无\AppData\Roaming\Typora\typora-user-images\image-20211205151106344.png)]](https://img-blog.csdnimg.cn/3c09cbd6497f40cebda9631e3849303e.png)
位置
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-EFN5uUQP-1638697968557)(C:\Users\无\AppData\Roaming\Typora\typora-user-images\image-20211205151209770.png)]](https://img-blog.csdnimg.cn/a8c81660b98141639bcbe37ddb66bc6a.png)
在 #include <bsp.h> 后面添加:#include "gpio.h" #include "app_cfg.h";
将 #include <stm32f10x_lib.h> 改为 #include "stm32f1xx_hal.h"。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-cvxWX8Ch-1638697968557)(C:\Users\无\AppData\Roaming\Typora\typora-user-images\image-20211205151320733.png)]](https://img-blog.csdnimg.cn/b62021e8e6a3467e8fd0ec5df92df171.png)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-cQKAIRjC-1638697968558)(C:\Users\无\AppData\Roaming\Typora\typora-user-images\image-20211205151310112.png)]](https://img-blog.csdnimg.cn/27298b754f4c4325aecffa3a4f05fd07.png)
位置
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-A5MzMvwr-1638697968559)(C:\Users\无\AppData\Roaming\Typora\typora-user-images\image-20211205151424983.png)]](https://img-blog.csdnimg.cn/5663b9d5478041509afc861fdcbca0fd.png)
修改大小
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-QaIgFG1h-1638697968559)(C:\Users\无\AppData\Roaming\Typora\typora-user-images\image-20211205151457569.png)]](https://img-blog.csdnimg.cn/ef8e8dbf3e7b4a5dacdb80f87cea309b.png)
位置
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-ctZY1Qt5-1638697968560)(C:\Users\无\AppData\Roaming\Typora\typora-user-images\image-20211205151747430.png)]](https://img-blog.csdnimg.cn/c6beba498601451ba947aaf6d7e117c9.png)
添加代码
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-TGxnMRIr-1638697968561)(C:\Users\无\AppData\Roaming\Typora\typora-user-images\image-20211205151811986.png)]](https://img-blog.csdnimg.cn/5d5751f57866404ab0c88fc8012a8e94.png)
在bsp.c 和 bsp.h 中添加代码
bsp.h
#ifndef BSP_H
#define BSP_H
#include “stm32f1xx_hal.h”
void BSP_Init(void);
#endif
bsp.c
#include “includes.h”
#define DWT_CR *(CPU_REG32 *)0xE0001000
#define DWT_CYCCNT *(CPU_REG32 *)0xE0001004
#define DEM_CR *(CPU_REG32 *)0xE000EDFC
#define DBGMCU_CR *(CPU_REG32 *)0xE0042004
#define DEM_CR_TRCENA (1 << 24)
#define DWT_CR_CYCCNTENA (1 << 0)
CPU_INT32U BSP_CPU_ClkFreq (void)
{
return HAL_RCC_GetHCLKFreq();
}
void BSP_Tick_Init(void)
{
CPU_INT32U cpu_clk_freq;
CPU_INT32U cnts;
cpu_clk_freq = BSP_CPU_ClkFreq();
#if(OS_VERSION>=3000u)
cnts = cpu_clk_freq/(CPU_INT32U)OSCfg_TickRate_Hz;
#else
cnts = cpu_clk_freq/(CPU_INT32U)OS_TICKS_PER_SEC;
#endif
OS_CPU_SysTickInit(cnts);
}
void BSP_Init(void)
{
BSP_Tick_Init();
MX_GPIO_Init();
}
#if (CPU_CFG_TS_TMR_EN == DEF_ENABLED)
void CPU_TS_TmrInit (void)
{
CPU_INT32U cpu_clk_freq_hz;
DEM_CR |= (CPU_INT32U)DEM_CR_TRCENA; /* Enable Cortex-M3's DWT CYCCNT reg. */
DWT_CYCCNT = (CPU_INT32U)0u;
DWT_CR |= (CPU_INT32U)DWT_CR_CYCCNTENA;
cpu_clk_freq_hz = BSP_CPU_ClkFreq();
CPU_TS_TmrFreqSet(cpu_clk_freq_hz);
}
#endif
#if (CPU_CFG_TS_TMR_EN == DEF_ENABLED)
CPU_TS_TMR CPU_TS_TmrRd (void)
{
return ((CPU_TS_TMR)DWT_CYCCNT);
}
#endif
#if (CPU_CFG_TS_32_EN == DEF_ENABLED)
CPU_INT64U CPU_TS32_to_uSec (CPU_TS32 ts_cnts)
{
CPU_INT64U ts_us;
CPU_INT64U fclk_freq;
fclk_freq = BSP_CPU_ClkFreq();
ts_us = ts_cnts / (fclk_freq / DEF_TIME_NBR_uS_PER_SEC);
return (ts_us);
}
#endif
#if (CPU_CFG_TS_64_EN == DEF_ENABLED)
CPU_INT64U CPU_TS64_to_uSec (CPU_TS64 ts_cnts)
{
CPU_INT64U ts_us;
CPU_INT64U fclk_freq;
fclk_freq = BSP_CPU_ClkFreq();
ts_us = ts_cnts / (fclk_freq / DEF_TIME_NBR_uS_PER_SEC);
return (ts_us);
}
#endif
修改main.c
/* USER CODE END Header /
/ Includes ------------------------------------------------------------------/
#include “main.h”
#include “gpio.h”
#include “usart.h”
/ Private includes ----------------------------------------------------------/
/ USER CODE BEGIN Includes /
#include <includes.h>
#include “stm32f1xx_hal.h”
/ USER CODE END Includes */
/* Private define ------------------------------------------------------------/
/ USER CODE BEGIN PD /
/ 任务优先级 */
#define START_TASK_PRIO 3
#define LED0_TASK_PRIO 4
#define MSG_TASK_PRIO 5
#define LED1_TASK_PRIO 6
/* 任务堆栈大小 */
#define START_STK_SIZE 96
#define LED0_STK_SIZE 64
#define MSG_STK_SIZE 64
#define LED1_STK_SIZE 64
/* 任务栈 */
CPU_STK START_TASK_STK[START_STK_SIZE];
CPU_STK LED0_TASK_STK[LED0_STK_SIZE];
CPU_STK MSG_TASK_STK[MSG_STK_SIZE];
CPU_STK LED1_TASK_STK[LED1_STK_SIZE];
/* 任务控制块 */
OS_TCB StartTaskTCB;
OS_TCB Led0TaskTCB;
OS_TCB MsgTaskTCB;
OS_TCB Led1TaskTCB;
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------/
/ USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* 任务函数定义 */
void start_task(void *p_arg);
static void AppTaskCreate(void);
static void AppObjCreate(void);
static void led_pc13(void *p_arg);
static void send_msg(void *p_arg);
static void led_pa3(void p_arg);
/ USER CODE END PV */
/* Private function prototypes -----------------------------------------------/
void SystemClock_Config(void);
/ USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------/
/ USER CODE BEGIN 0 /
/*
- @brief System Clock Configuration
- @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE END 0 */
/**
- @brief The application entry point.
- @retval int
/
int main(void)
{
OS_ERR err;
OSInit(&err);
HAL_Init();
SystemClock_Config();
//MX_GPIO_Init(); 这个在BSP的初始化里也会初始化
MX_USART1_UART_Init();
/ 创建任务 */
OSTaskCreate((OS_TCB )&StartTaskTCB, / Create the start task */
(CPU_CHAR *)“start task”,
(OS_TASK_PTR ) start_task,
(void *) 0,
(OS_PRIO ) START_TASK_PRIO,
(CPU_STK *)&START_TASK_STK[0],
(CPU_STK_SIZE) START_STK_SIZE/10,
(CPU_STK_SIZE) START_STK_SIZE,
(OS_MSG_QTY ) 0,
(OS_TICK ) 0,
(void *) 0,
(OS_OPT )(OS_OPT_TASK_STK_CHK | OS_OPT_TASK_STK_CLR),
(OS_ERR )&err);
/ 启动多任务系统,控制权交给uC/OS-III /
OSStart(&err); / Start multitasking (i.e. give control to uC/OS-III). */
}
void start_task(void *p_arg)
{
OS_ERR err;
CPU_SR_ALLOC();
p_arg = p_arg;
/* YangJie add 2021.05.20*/
BSP_Init(); /* Initialize BSP functions */
//CPU_Init();
//Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); //统计任务
#endif
#ifdef CPU_CFG_INT_DIS_MEAS_EN //如果使能了测量中断关闭时间
CPU_IntDisMeasMaxCurReset();
#endif
#if OS_CFG_SCHED_ROUND_ROBIN_EN //当使用时间片轮转的时候
//使能时间片轮转调度功能,时间片长度为1个系统时钟节拍,既1*5=5ms
OSSchedRoundRobinCfg(DEF_ENABLED,1,&err);
#endif
OS_CRITICAL_ENTER(); //进入临界区
/* 创建LED0任务 */
OSTaskCreate((OS_TCB * )&Led0TaskTCB,
(CPU_CHAR * )"led_pc13",
(OS_TASK_PTR )led_pc13,
(void * )0,
(OS_PRIO )LED0_TASK_PRIO,
(CPU_STK * )&LED0_TASK_STK[0],
(CPU_STK_SIZE)LED0_STK_SIZE/10,
(CPU_STK_SIZE)LED0_STK_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )0,
(void * )0,
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,
(OS_ERR * )&err);
/* 创建LED1任务 */
OSTaskCreate((OS_TCB * )&Led1TaskTCB,
(CPU_CHAR * )“led_pa3”,
(OS_TASK_PTR )led_pa3,
(void * )0,
(OS_PRIO )LED1_TASK_PRIO,
(CPU_STK * )&LED1_TASK_STK[0],
(CPU_STK_SIZE)LED1_STK_SIZE/10,
(CPU_STK_SIZE)LED1_STK_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )0,
(void * )0,
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,
(OS_ERR * )&err);
/* 创建MSG任务 */
OSTaskCreate((OS_TCB * )&MsgTaskTCB,
(CPU_CHAR * )"send_msg",
(OS_TASK_PTR )send_msg,
(void * )0,
(OS_PRIO )MSG_TASK_PRIO,
(CPU_STK * )&MSG_TASK_STK[0],
(CPU_STK_SIZE)MSG_STK_SIZE/10,
(CPU_STK_SIZE)MSG_STK_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )0,
(void * )0,
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,
(OS_ERR * )&err);
OS_TaskSuspend((OS_TCB*)&StartTaskTCB,&err); //挂起开始任务
OS_CRITICAL_EXIT(); //进入临界区
}
/**
- 函数功能: 启动任务函数体。
- 输入参数: p_arg 是在创建该任务时传递的形参
- 返 回 值: 无
- 说 明:无
*/
static void led_pc13 (void *p_arg)
{
OS_ERR err;
(void)p_arg;
BSP_Init(); /* Initialize BSP functions */
CPU_Init();
Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); /* Compute CPU capacity with no task running */
#endif
CPU_IntDisMeasMaxCurReset();
AppTaskCreate(); /* Create Application Tasks */
AppObjCreate(); /* Create Application Objects */
while (DEF_TRUE)
{
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_13,GPIO_PIN_RESET);
OSTimeDlyHMSM(0, 0, 1, 0,OS_OPT_TIME_HMSM_STRICT,&err);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_13,GPIO_PIN_SET);
OSTimeDlyHMSM(0, 0, 1, 0,OS_OPT_TIME_HMSM_STRICT,&err);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
static void led_pa3 (void *p_arg)
{
OS_ERR err;
(void)p_arg;
BSP_Init(); /* Initialize BSP functions */
CPU_Init();
Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); /* Compute CPU capacity with no task running */
#endif
CPU_IntDisMeasMaxCurReset();
AppTaskCreate(); /* Create Application Tasks */
AppObjCreate(); /* Create Application Objects */
while (DEF_TRUE)
{
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_3,GPIO_PIN_RESET);
OSTimeDlyHMSM(0, 0, 3, 0,OS_OPT_TIME_HMSM_STRICT,&err);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_3,GPIO_PIN_SET);
OSTimeDlyHMSM(0, 0, 3, 0,OS_OPT_TIME_HMSM_STRICT,&err);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
static void send_msg (void *p_arg)
{
OS_ERR err;
(void)p_arg;
BSP_Init(); /* Initialize BSP functions */
CPU_Init();
Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); /* Compute CPU capacity with no task running */
#endif
CPU_IntDisMeasMaxCurReset();
AppTaskCreate(); /* Create Application Tasks */
AppObjCreate(); /* Create Application Objects */
while (DEF_TRUE)
{
printf(“hello uc/OS! 欢迎来到RTOS多任务环境! \r\n”);
OSTimeDlyHMSM(0, 0, 2, 0,OS_OPT_TIME_HMSM_STRICT,&err);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/* USER CODE BEGIN 4 /
/*
- 函数功能: 创建应用任务
- 输入参数: p_arg 是在创建该任务时传递的形参
- 返 回 值: 无
- 说 明:无
*/
static void AppTaskCreate (void)
{
}
/**
- 函数功能: uCOSIII内核对象创建
- 输入参数: 无
- 返 回 值: 无
- 说 明:无
*/
static void AppObjCreate (void)
{
}
/* USER CODE END 4 */
/**
- @brief This function is executed in case of error occurrence.
- @retval None
/
void Error_Handler(void)
{
/ USER CODE BEGIN Error_Handler_Debug /
/ User can add his own implementation to report the HAL error return state */
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
- @brief Reports the name of the source file and the source line number
-
where the assert_param error has occurred. - @param file: pointer to the source file name
- @param line: assert_param error line source number
- @retval None
*/
void assert_failed(uint8_t file, uint32_t line)
{
/ USER CODE BEGIN 6 /
/ User can add his own implementation to report the file name and line number,
tex: printf(“Wrong parameters value: file %s on line %d\r\n”, file, line) /
/ USER CODE END 6 /
}
#endif / USE_FULL_ASSERT */
/************************ ? COPYRIGHT STMicroelectronics *END OF FILE/
修改文件 gpio.c
void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_3, GPIO_PIN_RESET);
/*Configure GPIO pin : PC13 */
GPIO_InitStruct.Pin = GPIO_PIN_13|GPIO_PIN_3;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
代码编译,烧录进芯片
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-1ErbJwtZ-1638697968561)(C:\Users\无\AppData\Roaming\Typora\typora-user-images\image-20211205152745073.png)]](https://img-blog.csdnimg.cn/559d49b332a447b39c89913e2cf6a514.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBAZ2ppc2g=,size_20,color_FFFFFF,t_70,g_se,x_16)

总结
本次运用了uC/OS-III 进行多任务,过程比较多,但是学习到了许多。