1.首先配置使能的GPIO端口 (这里通过配置GPIOE端口)
1.1、第0位引脚作为触发端(发射)
//PE0 OUT Trig
void GPIOE0_Init()
{
RCC->AHB1ENR |= 1<<4;//配置时钟源
GPIOE->MODER &= ~(3<<0);//位清零
GPIOE->MODER |= (1<<0);//配置输出模式
GPIOE->OTYPER &= ~(1<<0);//配置输出推挽
GPIOE->OSPEEDR |= (3<<0);//配置11:100 MHz(高速)
GPIOE->PUPDR &= ~(3<<0);//位清零
GPIOE->PUPDR |= (2<<0);//配置下拉
}
1.2、第1位引脚作为回收端(接收)
//PE1 IN Echo
void GPIOE1_Init_IN()
{
RCC->AHB1ENR |= 1<<4;
GPIOE->MODER &= ~(3<<2);
GPIOE->PUPDR &= ~(3<<2);
GPIOE->PUPDR |= (2<<2);
}
2.配置PE1输入数据端-作检测
int Check_E1()
{
int r = GPIOE->IDR & (1<<1);//配置PE1输入数据寄存器
if(r!=0)
return 1;
else
return 0;
}
3.us定时器中断
u32 US_Tick; //1us计数
void Timer4_Init()
{
RCC->APB1ENR |= 1<<2;//使能外设时钟-Timer4
TIM4->PSC=42-1; //预分频器
//Timer4的参考频率84Mhz 84Mhz/ 42 = 2MHz
TIM4->ARR=2-1; //设定计数器自动重装值 2/2MHZ=1us
// 1us产生一次中断
TIM4->DIER |= 1<<0; //允许更新中断
TIM4->CR1 |= 1<<0; //启动定时器
MY_NVIC_InitG2(0,1,TIM4_IRQn);//使能中断向量 配置优先级
}
//Timer4的中断回调函数
void TIM4_IRQHandler(void)
{
//了解是否进入了溢出中断
int r = TIM4->SR & 0x0001;
if(r!=0) //sr 第0位 为1
{
TIM4->SR &= ~(1<<0);//清中断
US_Tick++;
}
}
//1us延时函数
void My_Delay_US( u32 s )
{
u32 tmp = US_Tick;
while(1)
{
if( US_Tick - tmp >= s )
{
return;
}
}
}
4.超声波工作函数
void SR04_Work()
{
double t1,t2;//t1-发射;t2-返回 时间
double distance;//测距
//1.给传感器一个脉冲-测距 E0-高-delay-低
SW_E0(1);
My_Delay_US(30);//30us
SW_E0(0);
//2.等E1-高电平 记录时间t1
while(1)
{
if(Check_E1()==1)
{
t1=US_Tick;
break;
}
}
//3.等E1-低电平 记录时间t2
while(1)
{
if(Check_E1()==0)
{
t2=US_Tick;
break;
}
}
//4.计算距离(高电平时间*声速(340M/S))/2;m->cm:*100
distance=(t2-t1)/1000000.0f*340.0f/2.0f*100.0f;
printf("%.2lfcm\n",distance);
}
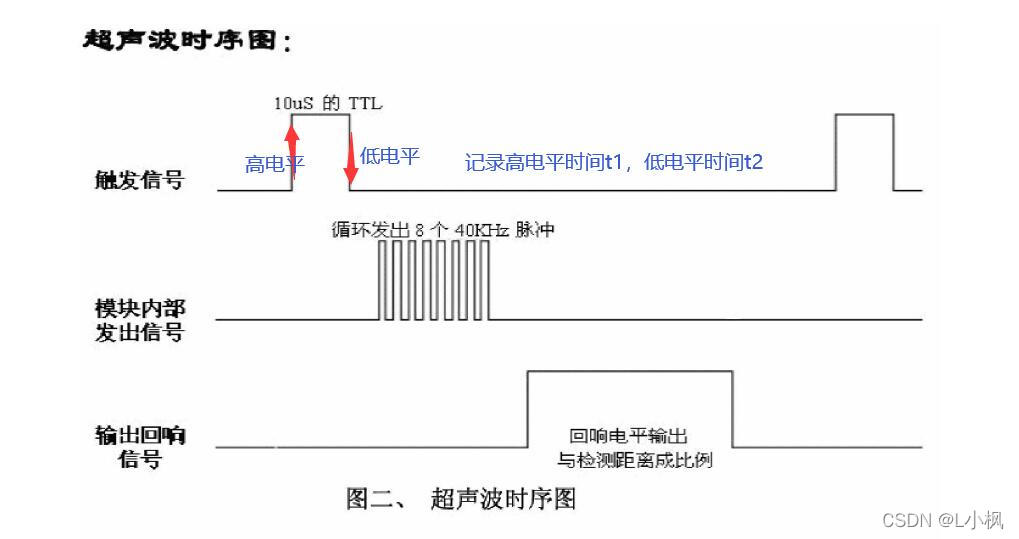
时序图如下:

每两秒检测一次,通过串口通信打印结果

效果如下: