Ŀ¼
һ��uc/OS-III���
UCOSIII��һ���ɲü����ɰ����͵Ķ������ں�,����û�����������ơ�UCOSIII�ṩ��ʵʱ����ϵͳ��������й���,������Դ������ͬ��������ͨ�ŵȡ�
ǰ��̨ϵͳ
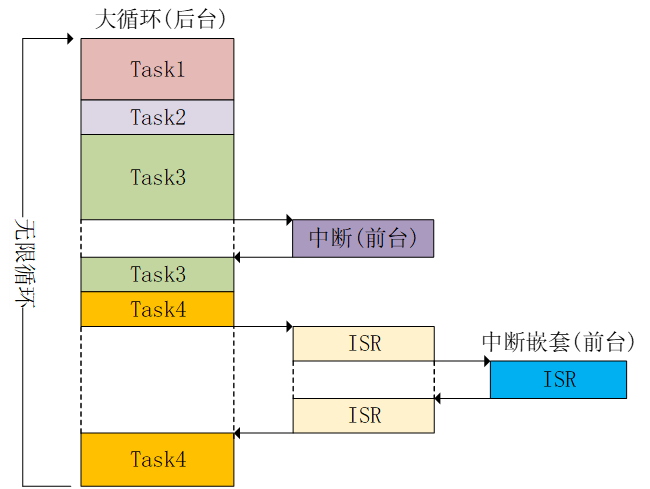
����Ƕ��ʽ����û��Ƕ��ʽ����ϵͳ�ĸ��� ,ֱ�Ӳ������,�������д����,������51��Ƭ��������û�в���ϵͳ�ĸ��ͨ���ѳ����Ϊ������:ǰ̨ϵͳ�ͺ�̨ϵͳ��
��Сϵͳͨ����ǰ��̨ϵͳ,�����ij������һ����ѭ�������ɸ��жϷ������:Ӧ�ó�����һ������ѭ��,ѭ���е���API�����������IJ���,�����ѭ���ͽ�����̨ϵͳ���жϷ���������ڴ���ϵͳ���첽�¼�,Ҳ����ǰ̨ϵͳ��ǰ̨���жϼ�,��̨������
���������ͼƬ����
RTOSϵͳ
RTOSȫ��Ϊ:Real Time OS,����ʵʱ����ϵͳ,ǿ������:ʵʱ�ԡ�ʵʱ����ϵͳ�ַ�ΪӲʵʱ����ʵʱ��ӲʵʱҪ���ڹ涨��ʱ���ڱ�����ɲ��� ,Ӳʵʱϵͳ��������ʱ,����ʵʱ���洦�����̳�ʱ�ĺ����û����ô�ϸ�
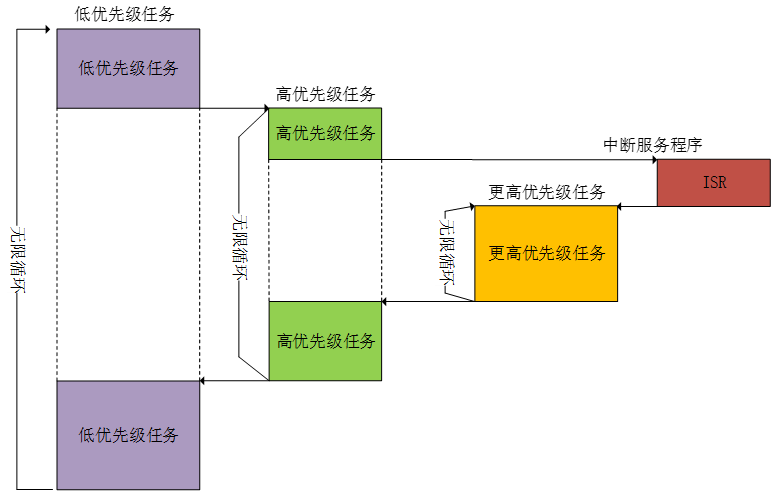
��ʵʱ����ϵͳ��,���ǿ���Ҫʵ�ֵĹ��ܻ���Ϊ�������,ÿ��������ʵ�����е�һ����,ÿ��������һ���ܼij���,ͨ����һ����ѭ����
�ɰ������ں�
RTOS���ں˸���������е�����,�ں˾����������ĸ�����,��ʱֹͣ��ǰ�����л�����������,������ں˵Ķ��������������������������˵ĸо��ͺ���оƬ�ж��CPU,���������ʵ����CPU��Դ���������,���������������ʵ�ֳ����ģ�黯����,�ܹ�ʵ�ָ��ӵ�ʵʱӦ�á��ɰ����ں˹���˼����ǿ��������������CPUʹ��Ȩ,���������о��������е����ȼ���ߵ��Ǹ�����
UCOSIII�ں��ļ�
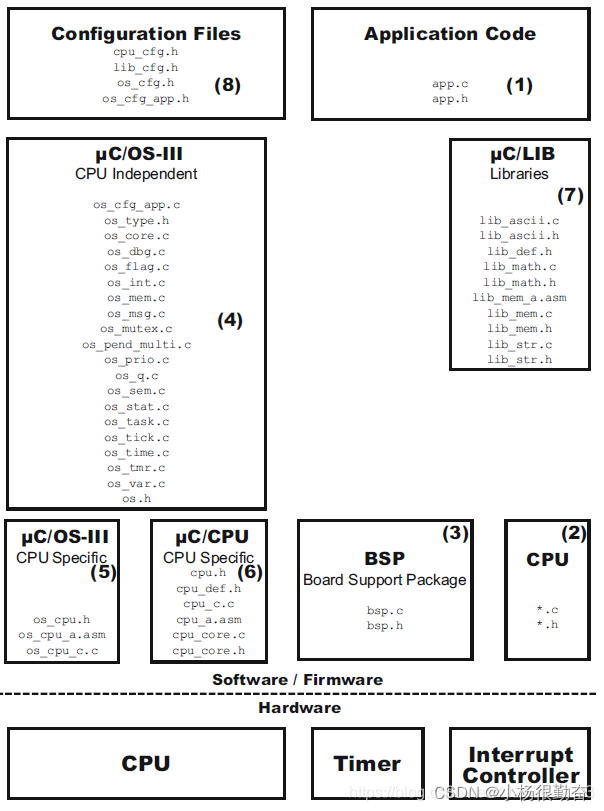
(1)Ӧ�ô�������빤�̡���Ʒ����ļ���Ϊ�˷���,��Щ���ؽ���APP.C ��APP.H��
(2)�뵼��������ͨ����Դ������ʽ�ṩ�⺯��,�Է�����CPU��MCU�ϵ���Χ�豸��
(3)�弶֧�ְ�(BSP)��ͨ����дΪ��Ŀ����ϵ���Χ�豸�ӿڵĴ��롣 ����,���������Դر�LED,�رռ̵������ȡ����,�¶ȴ������ȡ�
(4)�������C/ OS-III�������صĴ��롣 �ô���ʹ�ø߶ȿ���ֲ��ANSI C��д��
(5)���������ڲ�ͬCPU�ܹ��Ħ�C/ OS-III����,��Ϊ�˿�,����Ϊport ���ļ����С�
(6)��Micri��m,���Ƿ�װ��CPU���ܡ� ��Щ�ļ����������ڽ��ú������жϵĺ���,CPU _ ??? ��������Ҫ��������ʹ�õ�CPU�ͱ������Լ������,�ڱ���ʱ�õ�,���ҿ��ܷdz����á�
(7)uC/LIB ��һϵ�е�Դ�ļ�,�ṩ�˳��û����Ĺ���,���ڴ濽��,�ַ���,ASCII ��صĺ�����һЩ���Դ���������ṩ��stdlib �Ĺ��ܡ��ṩ��Щ�ļ���Ϊ��ȷ�����ǿ�����Ӧ�ó���֮��(�������ڱ�����֮��)��ȫ����ֲ��uC/OS-III ����Ҫ��Щ�ļ�,����uC/CPU ��Ҫ��
(8)uC/OS-III ���ܵ������ļ�(OS_CFG.H)������Ӧ����,OS_CFG_APP.H ������uC/OS-III ����ı������ʹ�С�����ݵĽṹ�����������ջ�Ĵ�С��ʱ�����ʡ��ڴ�ش�С�ȡ�
���������ļ�����
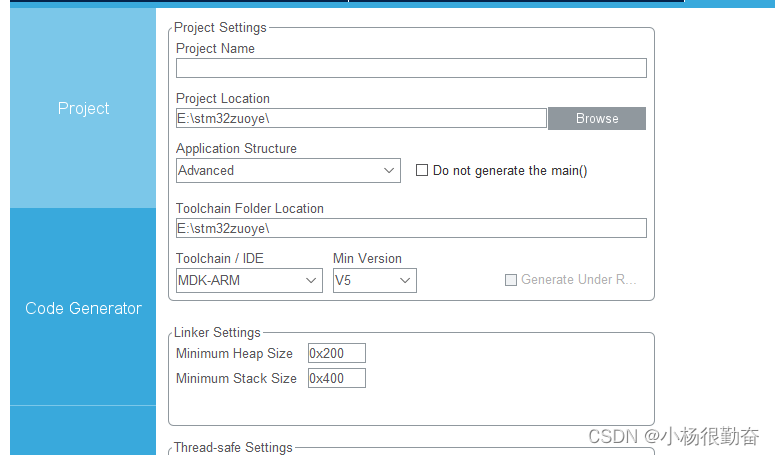
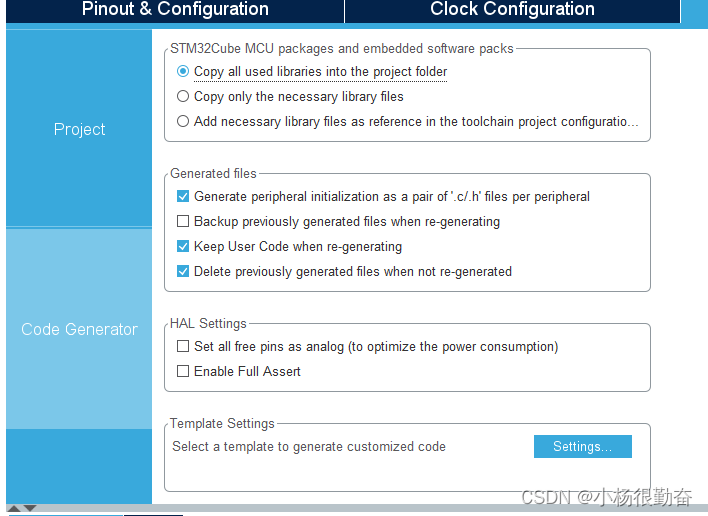
(1)����stm32CubeMx���������ļ�
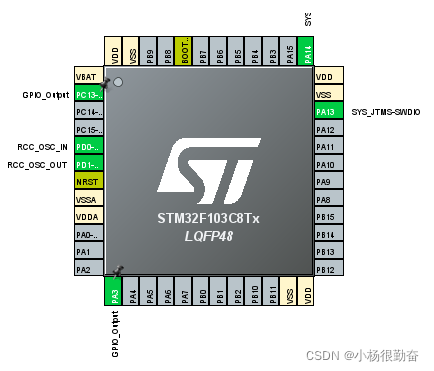
ѡ��stm32f103c8,����RCC

?����SYS
 ��PC13,PA3����ΪGPIO_Output
��PC13,PA3����ΪGPIO_Output
���������ļ�
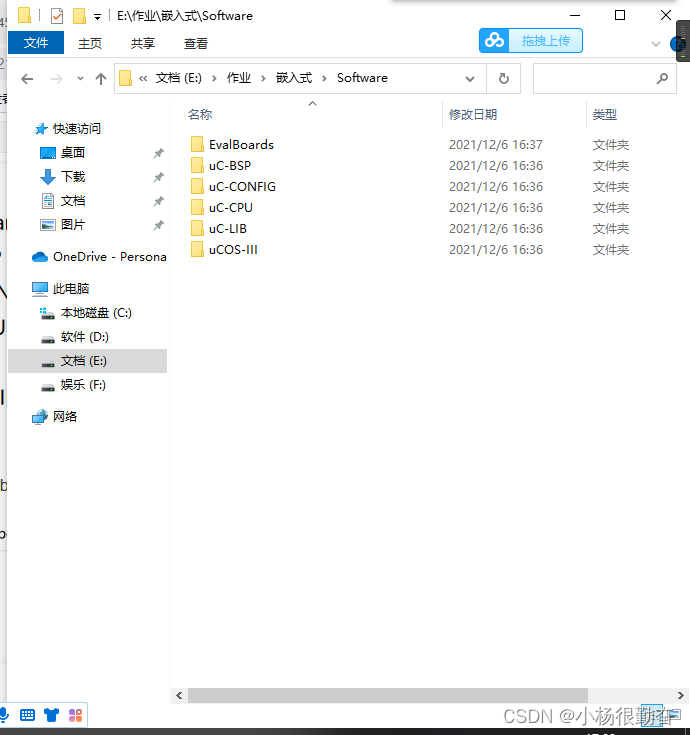
?(2)uc/OSԴ���ȡ
����:https://pan.baidu.com/s/1XAdKMU5ARYCRTVVey04r1Q
��ȡ��:1234
����ѡ��Micrium ��˾������������:Micrium Software and Documentation - Silicon Labs
ѡ��STϵ��,��� View all STMicroelectronics,��� STMicroelectronics STM32F107
֮������ʾע�����ؼ��ɡ�
(3)��ֲ
����ͼ��ʾ,���غõ�Դ��
�������ļ����Ƶ�CubeMx�����ļ�MDK -ARM�ļ�����
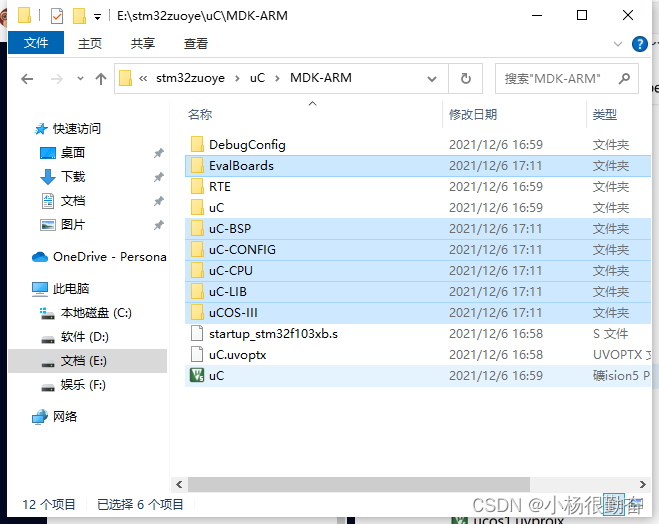
?��keil�ļ�����ͼ��ʾ�������ļ���,�ڶ�Ӧ�ļ��������Ӷ�ӦԴ���ļ���
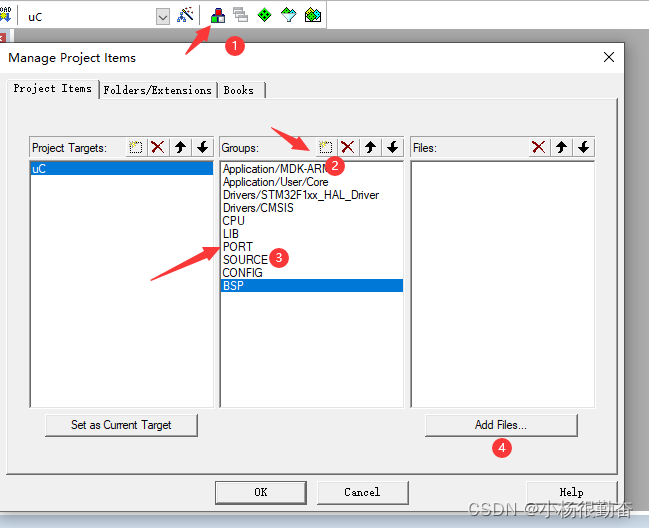
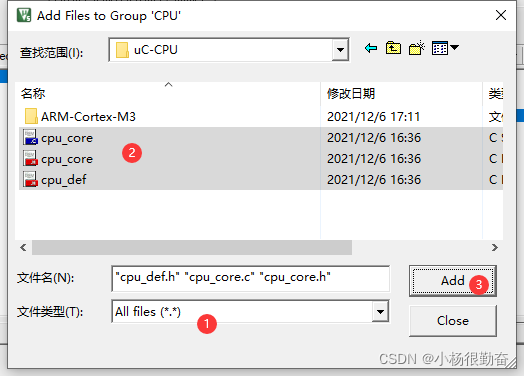
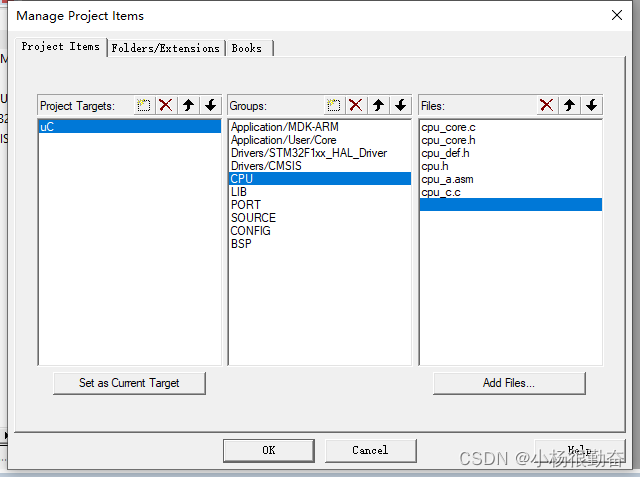
���CPU�C>Add Files��
MDK-ARM\uC-CPU·����ѡ�������ļ�,Add����
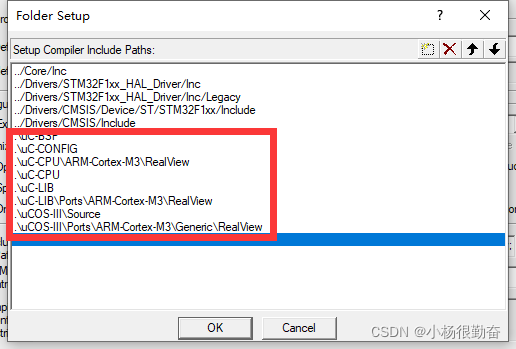
?����·��MDK-ARM\uC-CPU\ARM-Cortex-M3\RealView
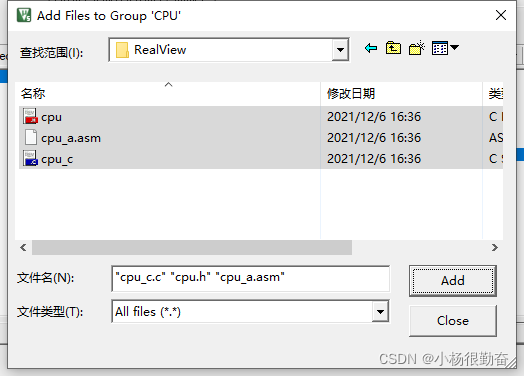
?
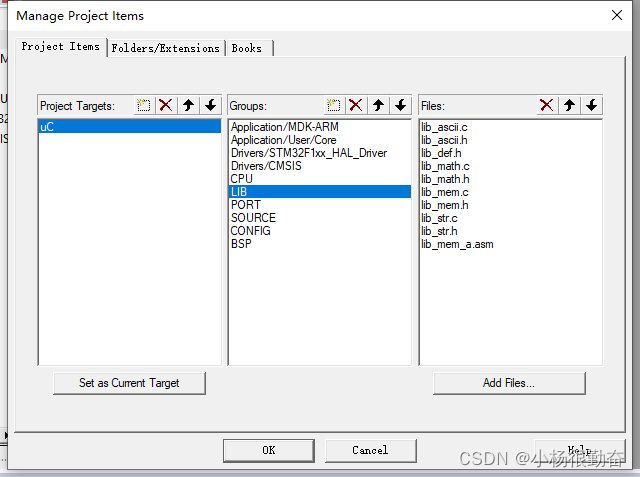
?LIB�����ļ�·��MDK-ARM\uC-LIB
MDK-ARM\uC-LIB\Ports\ARM-Cortex-M3\RealView
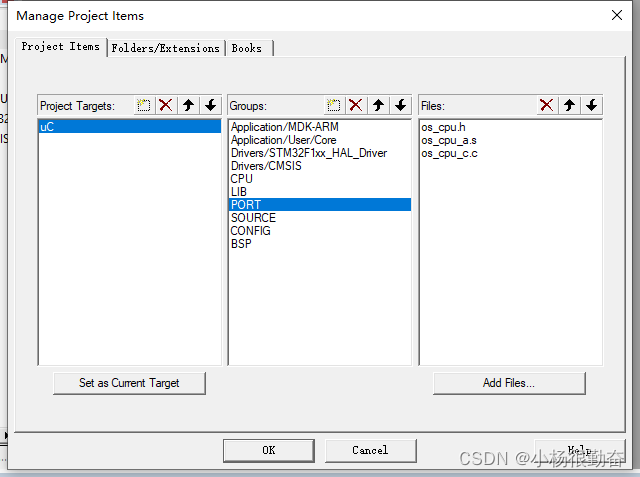
?PORT�����ļ�·��
MDK-ARM\uCOS-III\Ports\ARM-Cortex-M3\Generic\RealView
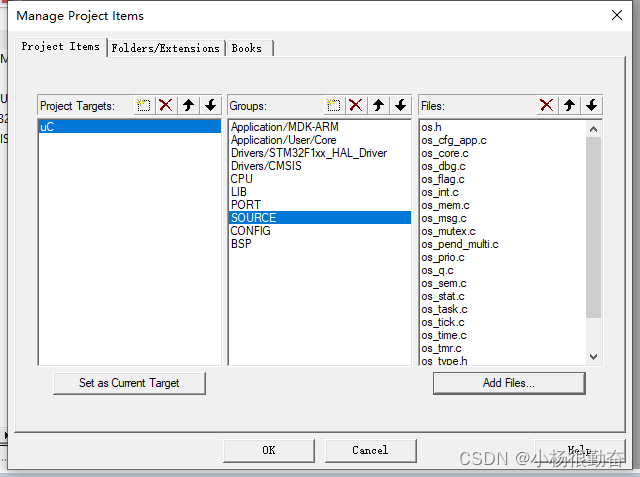
?SOURCE�����ļ�·��
MDK-ARM\uCOS-III\Source
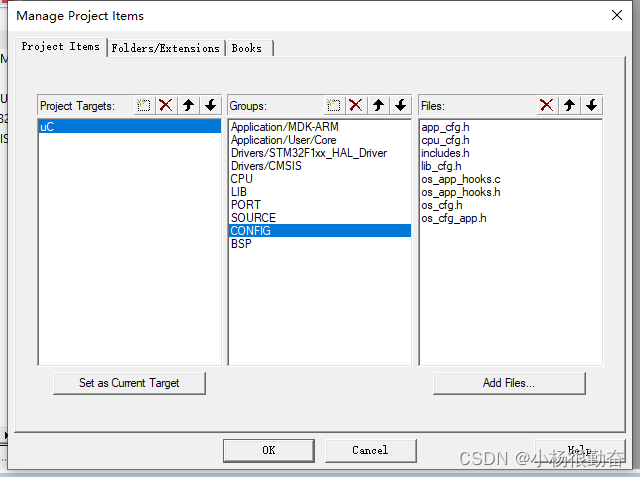
?CONFIG�����ļ�·��
MDK-ARM\uC-CONFIG
?BSP�����ļ�·��
MDK-ARM\uC-BSP
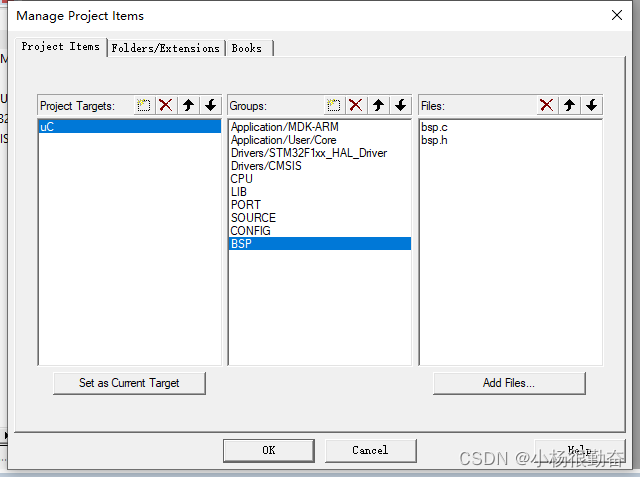
���Ϸ������ļ�·�����빤���ļ���
?(4)������������
1��������������
�����·����뵽��Ӧ�ļ���
bsp.h
#ifndef __BSP_H__
#define __BSP_H__
#include "stm32f1xx_hal.h"
void BSP_Init(void);
#endif
bsp.c
// bsp.c
#include "includes.h"
#define DWT_CR *(CPU_REG32 *)0xE0001000
#define DWT_CYCCNT *(CPU_REG32 *)0xE0001004
#define DEM_CR *(CPU_REG32 *)0xE000EDFC
#define DBGMCU_CR *(CPU_REG32 *)0xE0042004
#define DEM_CR_TRCENA (1 << 24)
#define DWT_CR_CYCCNTENA (1 << 0)
CPU_INT32U BSP_CPU_ClkFreq (void)
{
return HAL_RCC_GetHCLKFreq();
}
void BSP_Tick_Init(void)
{
CPU_INT32U cpu_clk_freq;
CPU_INT32U cnts;
cpu_clk_freq = BSP_CPU_ClkFreq();
#if(OS_VERSION>=3000u)
cnts = cpu_clk_freq/(CPU_INT32U)OSCfg_TickRate_Hz;
#else
cnts = cpu_clk_freq/(CPU_INT32U)OS_TICKS_PER_SEC;
#endif
OS_CPU_SysTickInit(cnts);
}
void BSP_Init(void)
{
BSP_Tick_Init();
MX_GPIO_Init();
}
#if (CPU_CFG_TS_TMR_EN == DEF_ENABLED)
void CPU_TS_TmrInit (void)
{
CPU_INT32U cpu_clk_freq_hz;
DEM_CR |= (CPU_INT32U)DEM_CR_TRCENA; /* Enable Cortex-M3's DWT CYCCNT reg. */
DWT_CYCCNT = (CPU_INT32U)0u;
DWT_CR |= (CPU_INT32U)DWT_CR_CYCCNTENA;
cpu_clk_freq_hz = BSP_CPU_ClkFreq();
CPU_TS_TmrFreqSet(cpu_clk_freq_hz);
}
#endif
#if (CPU_CFG_TS_TMR_EN == DEF_ENABLED)
CPU_TS_TMR CPU_TS_TmrRd (void)
{
return ((CPU_TS_TMR)DWT_CYCCNT);
}
#endif
#if (CPU_CFG_TS_32_EN == DEF_ENABLED)
CPU_INT64U CPU_TS32_to_uSec (CPU_TS32 ts_cnts)
{
CPU_INT64U ts_us;
CPU_INT64U fclk_freq;
fclk_freq = BSP_CPU_ClkFreq();
ts_us = ts_cnts / (fclk_freq / DEF_TIME_NBR_uS_PER_SEC);
return (ts_us);
}
#endif
#if (CPU_CFG_TS_64_EN == DEF_ENABLED)
CPU_INT64U CPU_TS64_to_uSec (CPU_TS64 ts_cnts)
{
CPU_INT64U ts_us;
CPU_INT64U fclk_freq;
fclk_freq = BSP_CPU_ClkFreq();
ts_us = ts_cnts / (fclk_freq / DEF_TIME_NBR_uS_PER_SEC);
return (ts_us);
}
#endif
?������
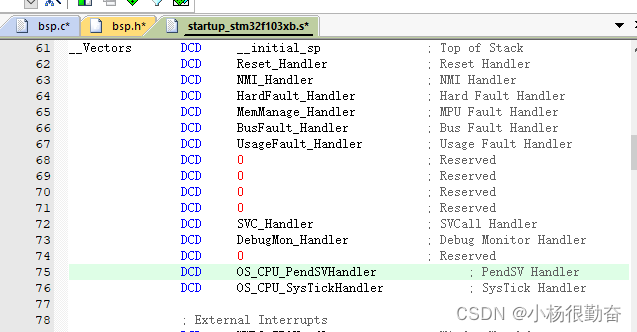
��startup_stm32f103xb.s�ļ���,��PendSV_Handler��ΪOS_CPU_PendSVHandler,
SysTick_Handler��ΪOS_CPU_SysTickHandler
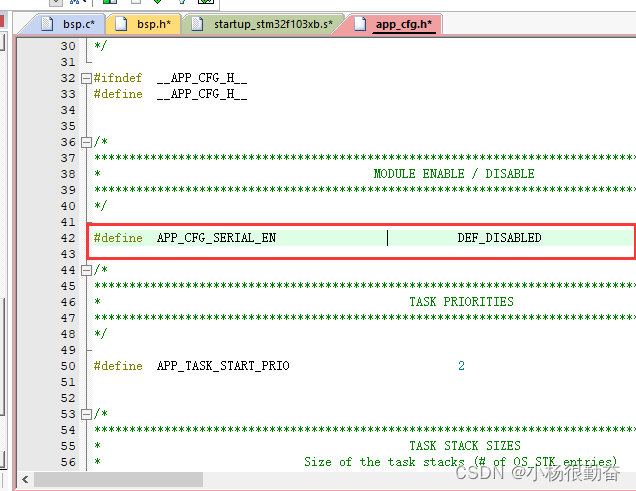
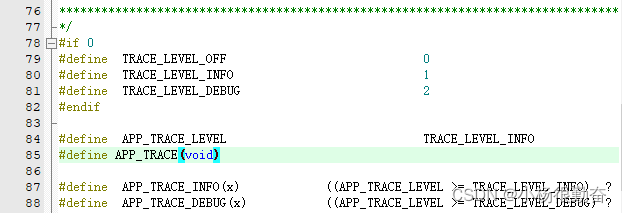
 ��app_cfg.h�ļ���,��DEF_ENABLED ��Ϊ DEF_DISABLED
��app_cfg.h�ļ���,��DEF_ENABLED ��Ϊ DEF_DISABLED
?#define APP_TRACE BSP_Ser_Printf ��Ϊ #define APP_TRACE(void)
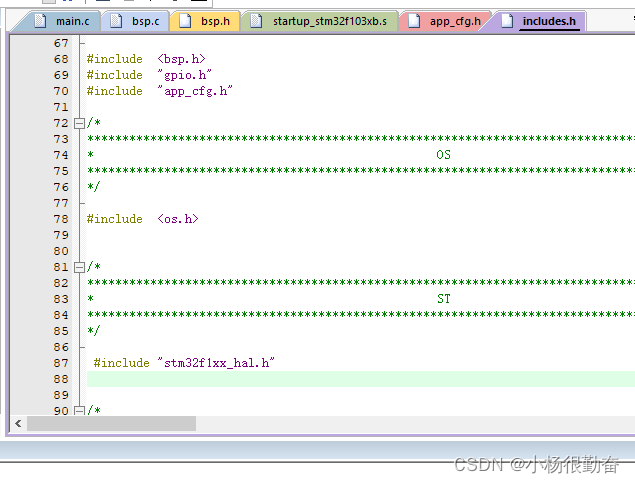
?include.h�ļ���
��#include <bsp.h>�������� #include ��gpio.h�� #include ��app_cfg.h��
��#include <stm32f10x_lib.h> ��Ϊ #include ��stm32f1xx_hal.h��
?
?��lib_cfg.h�ļ�����Ϊ5

��usart.c�ļ���Ӧλ���������´���
/* USER CODE BEGIN 1 */
typedef struct __FILE FILE;
int fputc(int ch,FILE *f){
HAL_UART_Transmit(&huart1,(uint8_t *)&ch,1,0xffff);
return ch;
}
/* USER CODE END 1 */
��gpio.c�ļ����Ĵ���
void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_3, GPIO_PIN_RESET);
/*Configure GPIO pin : PC13|PA3 */
GPIO_InitStruct.Pin = GPIO_PIN_13|GPIO_PIN_3;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
?�������д
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "gpio.h"
#include "usart.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <includes.h>
#include "stm32f1xx_hal.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* �������ȼ� */
#define START_TASK_PRIO 3
#define LED0_TASK_PRIO 4
#define MSG_TASK_PRIO 5
#define LED1_TASK_PRIO 6
/* �����ջ��С */
#define START_STK_SIZE 96
#define LED0_STK_SIZE 64
#define MSG_STK_SIZE 64
#define LED1_STK_SIZE 64
/* ����ջ */
CPU_STK START_TASK_STK[START_STK_SIZE];
CPU_STK LED0_TASK_STK[LED0_STK_SIZE];
CPU_STK MSG_TASK_STK[MSG_STK_SIZE];
CPU_STK LED1_TASK_STK[LED1_STK_SIZE];
/* ������ƿ� */
OS_TCB StartTaskTCB;
OS_TCB Led0TaskTCB;
OS_TCB MsgTaskTCB;
OS_TCB Led1TaskTCB;
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* ���������� */
void start_task(void *p_arg);
static void AppTaskCreate(void);
static void AppObjCreate(void);
static void led_pc13(void *p_arg);
static void send_msg(void *p_arg);
static void led_pa3(void *p_arg);
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
OS_ERR err;
OSInit(&err);
HAL_Init();
SystemClock_Config();
//MX_GPIO_Init(); �����BSP�ij�ʼ����Ҳ���ʼ��
MX_USART1_UART_Init();
/* �������� */
OSTaskCreate((OS_TCB *)&StartTaskTCB, /* Create the start task */
(CPU_CHAR *)"start task",
(OS_TASK_PTR ) start_task,
(void *) 0,
(OS_PRIO ) START_TASK_PRIO,
(CPU_STK *)&START_TASK_STK[0],
(CPU_STK_SIZE) START_STK_SIZE/10,
(CPU_STK_SIZE) START_STK_SIZE,
(OS_MSG_QTY ) 0,
(OS_TICK ) 0,
(void *) 0,
(OS_OPT )(OS_OPT_TASK_STK_CHK | OS_OPT_TASK_STK_CLR),
(OS_ERR *)&err);
/* ����������ϵͳ,����Ȩ����uC/OS-III */
OSStart(&err); /* Start multitasking (i.e. give control to uC/OS-III). */
}
void start_task(void *p_arg)
{
OS_ERR err;
CPU_SR_ALLOC();
p_arg = p_arg;
/* YangJie add 2021.05.20*/
BSP_Init(); /* Initialize BSP functions */
//CPU_Init();
//Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); //ͳ������
#endif
#ifdef CPU_CFG_INT_DIS_MEAS_EN //���ʹ���˲����жϹر�ʱ��
CPU_IntDisMeasMaxCurReset();
#endif
#if OS_CFG_SCHED_ROUND_ROBIN_EN //��ʹ��ʱ��Ƭ��ת��ʱ��
//ʹ��ʱ��Ƭ��ת���ȹ���,ʱ��Ƭ����Ϊ1��ϵͳʱ�ӽ���,��1*5=5ms
OSSchedRoundRobinCfg(DEF_ENABLED,1,&err);
#endif
OS_CRITICAL_ENTER(); //�����ٽ���
/* ����LED0���� */
OSTaskCreate((OS_TCB * )&Led0TaskTCB,
(CPU_CHAR * )"led_pc13",
(OS_TASK_PTR )led_pc13,
(void * )0,
(OS_PRIO )LED0_TASK_PRIO,
(CPU_STK * )&LED0_TASK_STK[0],
(CPU_STK_SIZE)LED0_STK_SIZE/10,
(CPU_STK_SIZE)LED0_STK_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )0,
(void * )0,
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,
(OS_ERR * )&err);
/* ����LED1���� */
OSTaskCreate((OS_TCB * )&Led1TaskTCB,
(CPU_CHAR * )"led_pa3",
(OS_TASK_PTR )led_pa3,
(void * )0,
(OS_PRIO )LED1_TASK_PRIO,
(CPU_STK * )&LED1_TASK_STK[0],
(CPU_STK_SIZE)LED1_STK_SIZE/10,
(CPU_STK_SIZE)LED1_STK_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )0,
(void * )0,
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,
(OS_ERR * )&err);
/* ����MSG���� */
OSTaskCreate((OS_TCB * )&MsgTaskTCB,
(CPU_CHAR * )"send_msg",
(OS_TASK_PTR )send_msg,
(void * )0,
(OS_PRIO )MSG_TASK_PRIO,
(CPU_STK * )&MSG_TASK_STK[0],
(CPU_STK_SIZE)MSG_STK_SIZE/10,
(CPU_STK_SIZE)MSG_STK_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )0,
(void * )0,
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,
(OS_ERR * )&err);
OS_TaskSuspend((OS_TCB*)&StartTaskTCB,&err); //����ʼ����
OS_CRITICAL_EXIT(); //�����ٽ���
}
/**
* ��������: �����������塣
* �������: p_arg ���ڴ���������ʱ���ݵ��β�
* �� �� ֵ: ��
* ˵ ��:��
*/
static void led_pc13 (void *p_arg)
{
OS_ERR err;
(void)p_arg;
BSP_Init(); /* Initialize BSP functions */
CPU_Init();
Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); /* Compute CPU capacity with no task running */
#endif
CPU_IntDisMeasMaxCurReset();
AppTaskCreate(); /* Create Application Tasks */
AppObjCreate(); /* Create Application Objects */
while (DEF_TRUE)
{
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_13,GPIO_PIN_RESET);
OSTimeDlyHMSM(0, 0, 1, 0,OS_OPT_TIME_HMSM_STRICT,&err);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_13,GPIO_PIN_SET);
OSTimeDlyHMSM(0, 0, 1, 0,OS_OPT_TIME_HMSM_STRICT,&err);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
static void led_pa3 (void *p_arg)
{
OS_ERR err;
(void)p_arg;
BSP_Init(); /* Initialize BSP functions */
CPU_Init();
Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); /* Compute CPU capacity with no task running */
#endif
CPU_IntDisMeasMaxCurReset();
AppTaskCreate(); /* Create Application Tasks */
AppObjCreate(); /* Create Application Objects */
while (DEF_TRUE)
{
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_3,GPIO_PIN_RESET);
OSTimeDlyHMSM(0, 0, 3, 0,OS_OPT_TIME_HMSM_STRICT,&err);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_3,GPIO_PIN_SET);
OSTimeDlyHMSM(0, 0, 3, 0,OS_OPT_TIME_HMSM_STRICT,&err);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
static void send_msg (void *p_arg)
{
OS_ERR err;
(void)p_arg;
BSP_Init(); /* Initialize BSP functions */
CPU_Init();
Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); /* Compute CPU capacity with no task running */
#endif
CPU_IntDisMeasMaxCurReset();
AppTaskCreate(); /* Create Application Tasks */
AppObjCreate(); /* Create Application Objects */
while (DEF_TRUE)
{
printf("hello uc/OS \r\n");
OSTimeDlyHMSM(0, 0, 2, 0,OS_OPT_TIME_HMSM_STRICT,&err);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/* USER CODE BEGIN 4 */
/**
* ��������: ����Ӧ������
* �������: p_arg ���ڴ���������ʱ���ݵ��β�
* �� �� ֵ: ��
* ˵ ��:��
*/
static void AppTaskCreate (void)
{
}
/**
* ��������: uCOSIII�ں˶���
* �������: ��
* �� �� ֵ: ��
* ˵ ��:��
*/
static void AppObjCreate (void)
{
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
?������
?����ͨ��,��¼
(5)�������
 ?
?
?
������������ץȡ���μ����ڷ���
1��ʹ��keil����ץȡ����
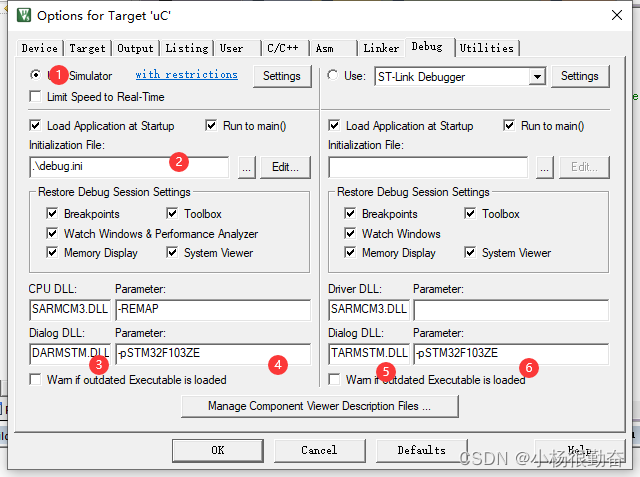
��������ġ�Dialog DLL����Ϊ��DARMSTM.DLL���͡�TARMSTM.DLL��;parameter��Ϊ��-pSTM32F103ZE��
�ڹ������½�һ��debug.ini�ļ�,���ļ���д��
map 0x40000000, 0x40007FFF read write // APB1
map 0x40010000, 0x400157FF read write // APB2
map 0x40020000, 0x4007FFFF read write // AHB1
map 0x50000000, 0x50060BFF read write // AHB2
map 0x60000000, 0x60000FFF read write // AHB3
map 0xE0000000, 0xE00FFFFF read write // CORTEX-M4 internal peripherals
��Debug�µ�Initialization File ������debug.ini�ļ�,����ͼ��ʾ
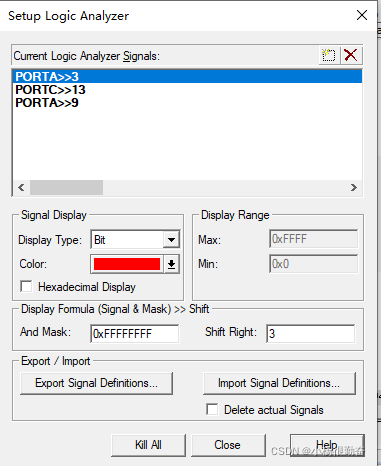
?�۲�۲�PA3 PC13 PA9�����˿�
����
?ʹ��Saleae Logic 16ץȡ����
?
��ͼ����ͨ��,�������ʵ�
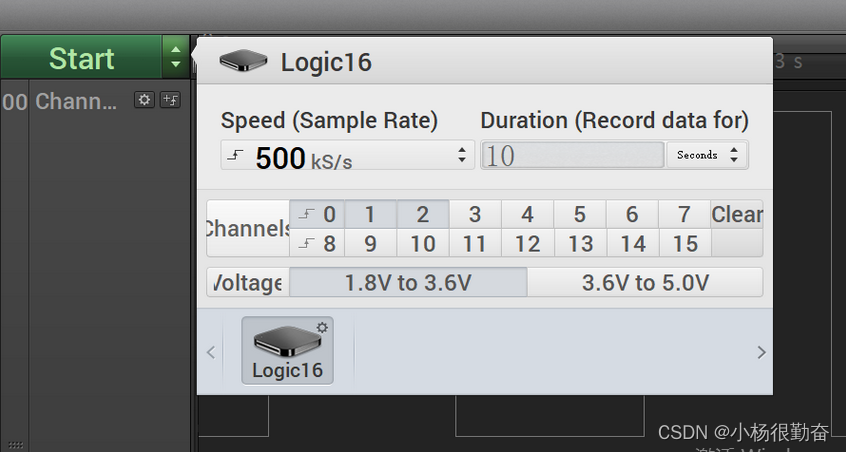
?start
 ����ͨ������
����ͨ������
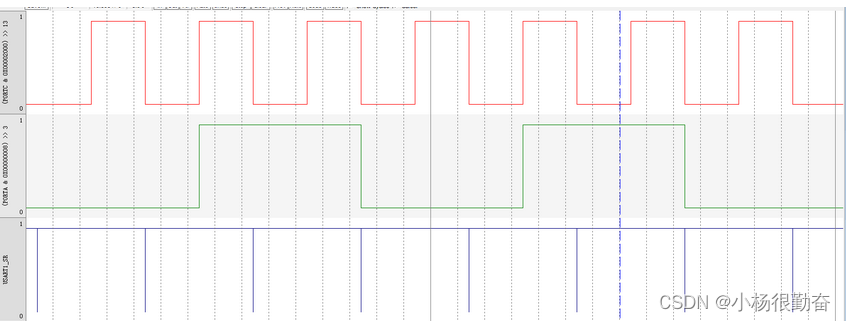
 ?��ʵ��ʱ��,��Ŀ������ʱ���һ��,˵��ʱ�����dzɹ��ġ�
?��ʵ��ʱ��,��Ŀ������ʱ���һ��,˵��ʱ�����dzɹ��ġ�
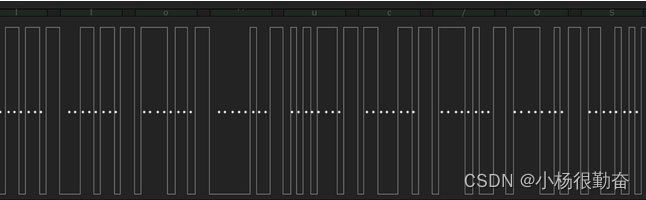
 �Ѿ���ͨ��2����Ϊ���첽����Э��,��������Ϊhello uc/OS!
�Ѿ���ͨ��2����Ϊ���첽����Э��,��������Ϊhello uc/OS!
���ѡ��Async Serial
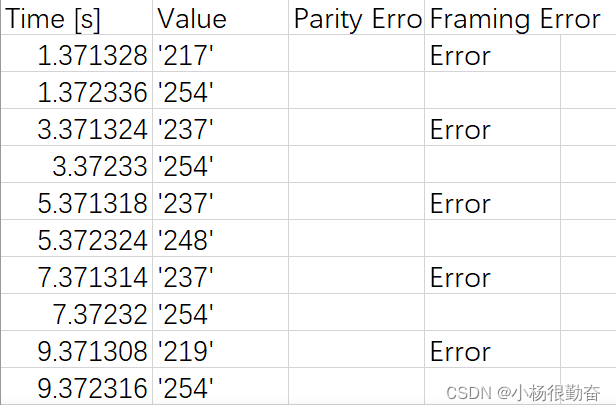
��������Դ˴�ʵ����е��������Dzɼ��������?
?��עÿ���ɼ���ߵ͵�ƽ,�뷢��Ŀ����ĸ�Ķ����ƱȽ�,���Է��ֱ���˳���������,�����뷢�͵�Ŀ��ֵ��һ�µġ�
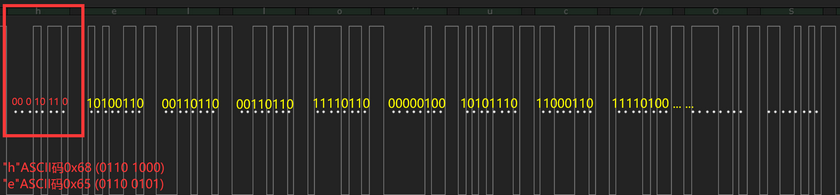
?������
�ġ��ܽ�
�˴�ʵ��ѧϰ��uc/os��ֲ,�˽��������ջ,������ƿ�,��������,������Ϥ���������ǵ�ʹ�á�