前言
BabyOS 是一套代码框架,好比于乐高积木,提供一些功能模块,按照相对应的使用方法可以快速搭建自己的嵌入式系统。
那么我们说一下想把它移植到别的平台如何操作?
点灯作为第一个目标,那就是移植GPIO操作。
流程
想学习自带例程对应的方法,搞懂之后就移植到自己的目标平台;
自带历程STM32F107
#define GPIO_REG_OFF (0x400UL)
#define GPIO_REG_BASE (0x40010800UL)
typedef struct
{
volatile uint32_t CRL;
volatile uint32_t CRH;
volatile uint32_t IDR;
volatile uint32_t ODR;
volatile uint32_t BSRR;
volatile uint32_t BRR;
volatile uint32_t LCKR;
} McuGpioReg_t;
static void _GpioConfig(bHalGPIOPort_t port, bHalGPIOPin_t pin, bHalGPIODir_t dir,
bHalGPIOPull_t pull)
{
uint32_t dir_val = 4;
uint32_t pull_val = 0;
McuGpioReg_t *pGpio = (McuGpioReg_t *)(GPIO_REG_BASE + port * GPIO_REG_OFF);
if (!B_HAL_GPIO_ISVALID(port, pin))
{
return;
}
if (dir == B_HAL_GPIO_OUTPUT)
{
dir_val = (pin == B_HAL_PINAll) ? 0x33333333 : 3;
}
else if (pull != B_HAL_GPIO_NOPULL)
{
dir_val = (pin == B_HAL_PINAll) ? 0x88888888 : 8;
pull_val = (pin == B_HAL_PINAll) ? 0xFFFF : (0X0001 << pin);
if (pull == B_HAL_GPIO_PULLUP)
{
pGpio->BSRR = pull_val;
}
else
{
pGpio->BRR = pull_val;
}
}
if (pin == B_HAL_PINAll)
{
pGpio->CRL = dir_val;
pGpio->CRH = dir_val;
}
else
{
if (pin < B_HAL_PIN8)
{
pGpio->CRL &= ~(0x0000000F << (pin * 4));
pGpio->CRL |= (dir_val << (pin * 4));
}
else
{
pGpio->CRH &= ~(0x0000000F << (pin * 4));
pGpio->CRH |= (dir_val << (pin * 4));
}
}
}
static void _GpioWritePin(bHalGPIOPort_t port, bHalGPIOPin_t pin, uint8_t s)
{
uint32_t cs_val = 0x00000001 << pin;
McuGpioReg_t *pGpio = (McuGpioReg_t *)(GPIO_REG_BASE + port * GPIO_REG_OFF);
if (!B_HAL_GPIO_ISVALID(port, pin) || pin == B_HAL_PINAll)
{
return;
}
if (s == 0)
{
cs_val <<= 16;
}
pGpio->BSRR = cs_val;
}
static uint8_t _GpioReadPin(bHalGPIOPort_t port, bHalGPIOPin_t pin)
{
uint32_t id_val = 0;
McuGpioReg_t *pGpio = (McuGpioReg_t *)(GPIO_REG_BASE + port * GPIO_REG_OFF);
if (!B_HAL_GPIO_ISVALID(port, pin) || pin == B_HAL_PINAll)
{
return 0;
}
id_val = pGpio->IDR;
return ((id_val & (0x0001 << pin)) != 0);
}
static void _GpioWrite(bHalGPIOPort_t port, uint16_t dat)
{
McuGpioReg_t *pGpio = (McuGpioReg_t *)(GPIO_REG_BASE + port * GPIO_REG_OFF);
if (!B_HAL_GPIO_ISVALID(port, 0))
{
return;
}
pGpio->ODR = dat;
}
static uint16_t _GpioRead(bHalGPIOPort_t port)
{
uint32_t id_val = 0;
McuGpioReg_t *pGpio = (McuGpioReg_t *)(GPIO_REG_BASE + port * GPIO_REG_OFF);
if (!B_HAL_GPIO_ISVALID(port, 0))
{
return 0;
}
id_val = pGpio->IDR;
return (id_val & 0xffff);
}
bHalGPIODriver_t bHalGPIODriver = {
.pGpioConfig = _GpioConfig,
.pGpioWritePin = _GpioWritePin,
.pGpioWritePort = _GpioWrite,
.pGpioReadPin = _GpioReadPin,
.pGpioReadPort = _GpioRead,
};地址映射
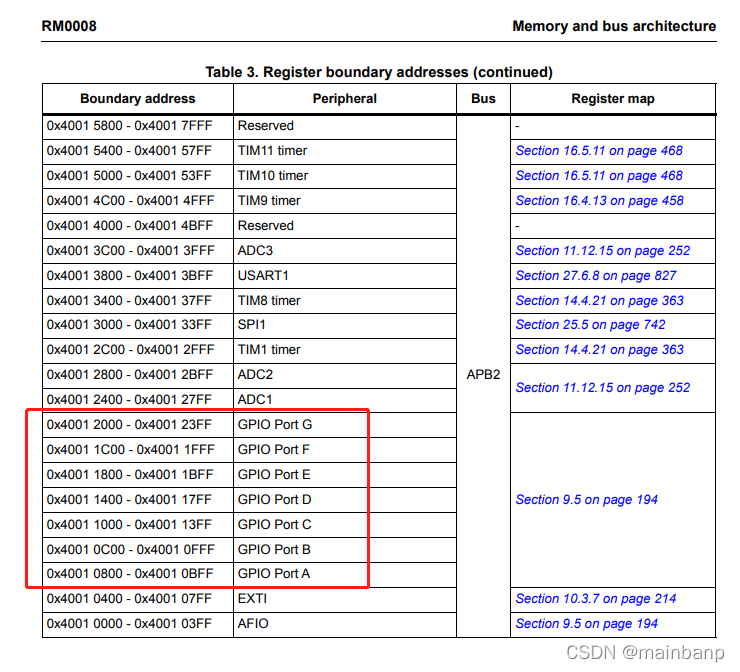
首先看到的是GPIO对应的地址映射,那么我们找对应的数据手册查找GPIO寄存器地址映射为:
?#define GPIO_REG_OFF (0x400UL)? //GPIO A,B,C,D 之间的地址偏移量
#define GPIO_REG_BASE (0x40010800UL)? ?//GPIO 起始地址
控制寄存器
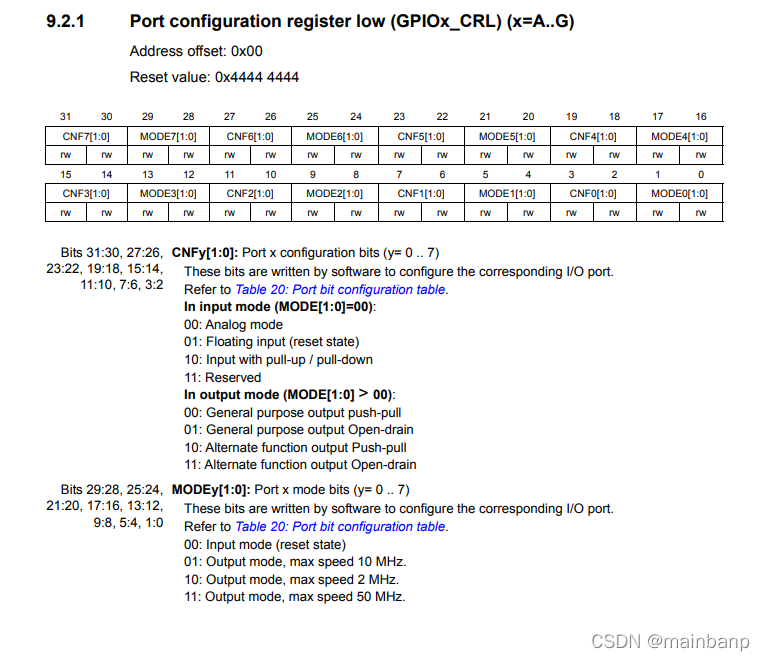
与之相对应的代码为:
static void _GpioConfig(bHalGPIOPort_t port, bHalGPIOPin_t pin, bHalGPIODir_t dir,
bHalGPIOPull_t pull)
{
uint32_t dir_val = 4;
uint32_t pull_val = 0;
McuGpioReg_t *pGpio = (McuGpioReg_t *)(GPIO_REG_BASE + port * GPIO_REG_OFF);
if (!B_HAL_GPIO_ISVALID(port, pin))
{
return;
}
if (dir == B_HAL_GPIO_OUTPUT)
{
dir_val = (pin == B_HAL_PINAll) ? 0x33333333 : 3; //G OUT Push-pull 50mhz
}
else if (pull != B_HAL_GPIO_NOPULL)
{
// Input pull-down / pull-up
dir_val = (pin == B_HAL_PINAll) ? 0x88888888 : 8;
pull_val = (pin == B_HAL_PINAll) ? 0xFFFF : (0X0001 << pin); //SET BIT
if (pull == B_HAL_GPIO_PULLUP)
{
pGpio->BSRR = pull_val; // pull-up
}
else
{
pGpio->BRR = pull_val; //pull-down
}
}
if (pin == B_HAL_PINAll)
{
pGpio->CRL = dir_val;
pGpio->CRH = dir_val;
}
else
{
if (pin < B_HAL_PIN8)
{
pGpio->CRL &= ~(0x0000000F << (pin * 4));
pGpio->CRL |= (dir_val << (pin * 4));
}
else
{
pGpio->CRH &= ~(0x0000000F << (pin * 4));
pGpio->CRH |= (dir_val << (pin * 4));
}
}
}?可以看到主要是通过逻辑判断操做 CRL,CRH,BSRR,BRR寄存器;
更直观的表格
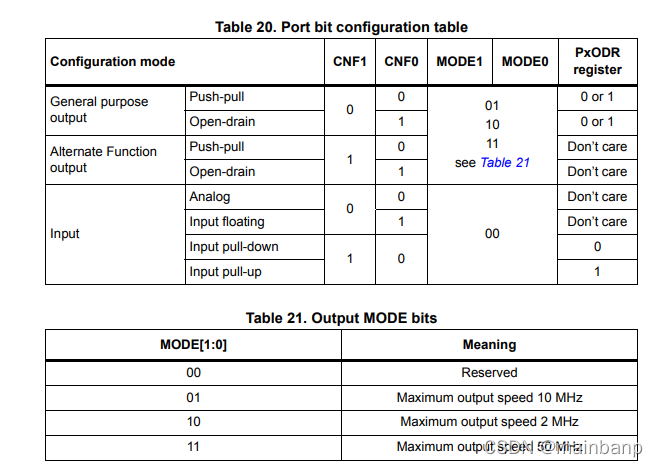
通过上面表格可以看到,dir_val 变量赋值给CRL,CRH,配置port 对应的16个pin;
IO为输出属性时,配置的固定为最大时钟50MHZ输出;
这里,作者在IO操作上进行了精简,输入,输出;浮空,上拉,下拉
typedef enum
{
B_HAL_GPIO_INPUT,
B_HAL_GPIO_OUTPUT,
B_HAL_GPIO_DIR_INVALID,
} bHalGPIODir_t;
typedef enum
{
B_HAL_GPIO_NOPULL,
B_HAL_GPIO_PULLUP,
B_HAL_GPIO_PULLDOWN,
B_HAL_GPIO_PULL_INVALID,
} bHalGPIOPull_t;?备注:需要注意的是,在输出上/下拉的时候与PxODR register 没关系,在输入上/下拉的时候会受到PxODR register 值影响,上面代码中,使用的实现是通过BSRR与BRR,并没有直接去操作ODR寄存器。
if (pull == B_HAL_GPIO_PULLUP)
{
pGpio->BSRR = pull_val;
}
else
{
pGpio->BRR = pull_val;
}