Ŀ¼
һ��ʹ��STM32CubeMX����STM32F103C8T6HAL��
1��.ΪuC-BSP�ļ����½�bsp.c��bsp.h�ļ�
2�����ļ���uC-CONFIG���������ļ�
?3.��uCOS����ļ����Ƶ�HAL���̵�MDK-ARM�ļ�����
2��ʹ����ʵ���Dz���SaleaeLogic16 �۲Ⲩ��
һ��ʹ��STM32CubeMX����STM32F103C8T6HAL��
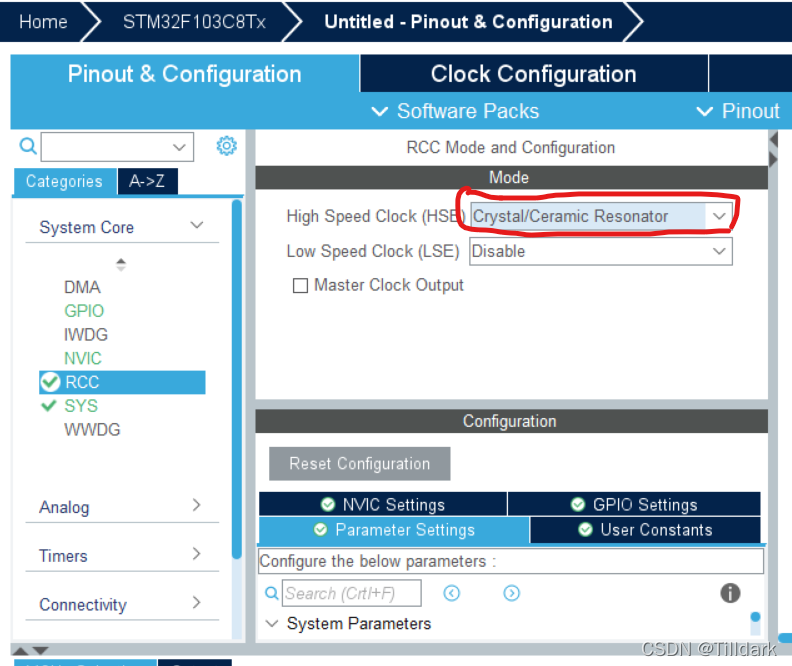
��stm32cubemx���Ƚ�������RCC
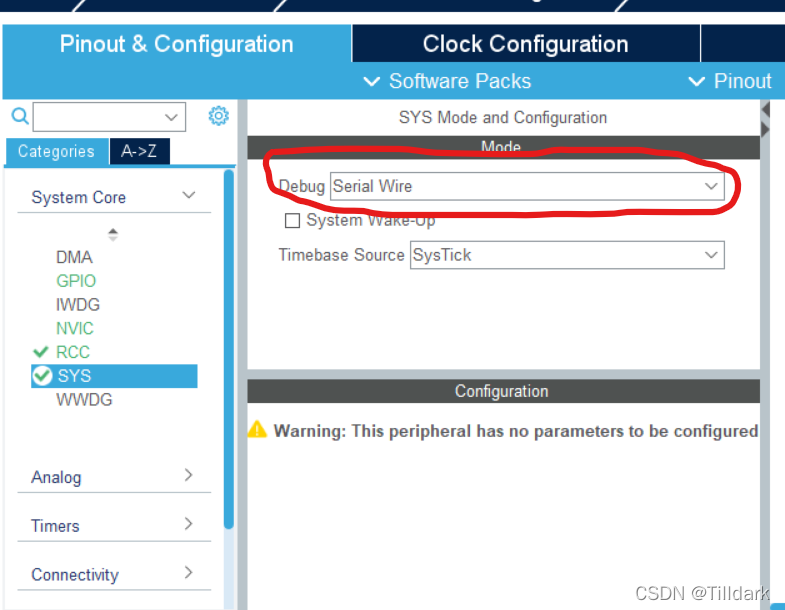
?������SYS,��������ͼ
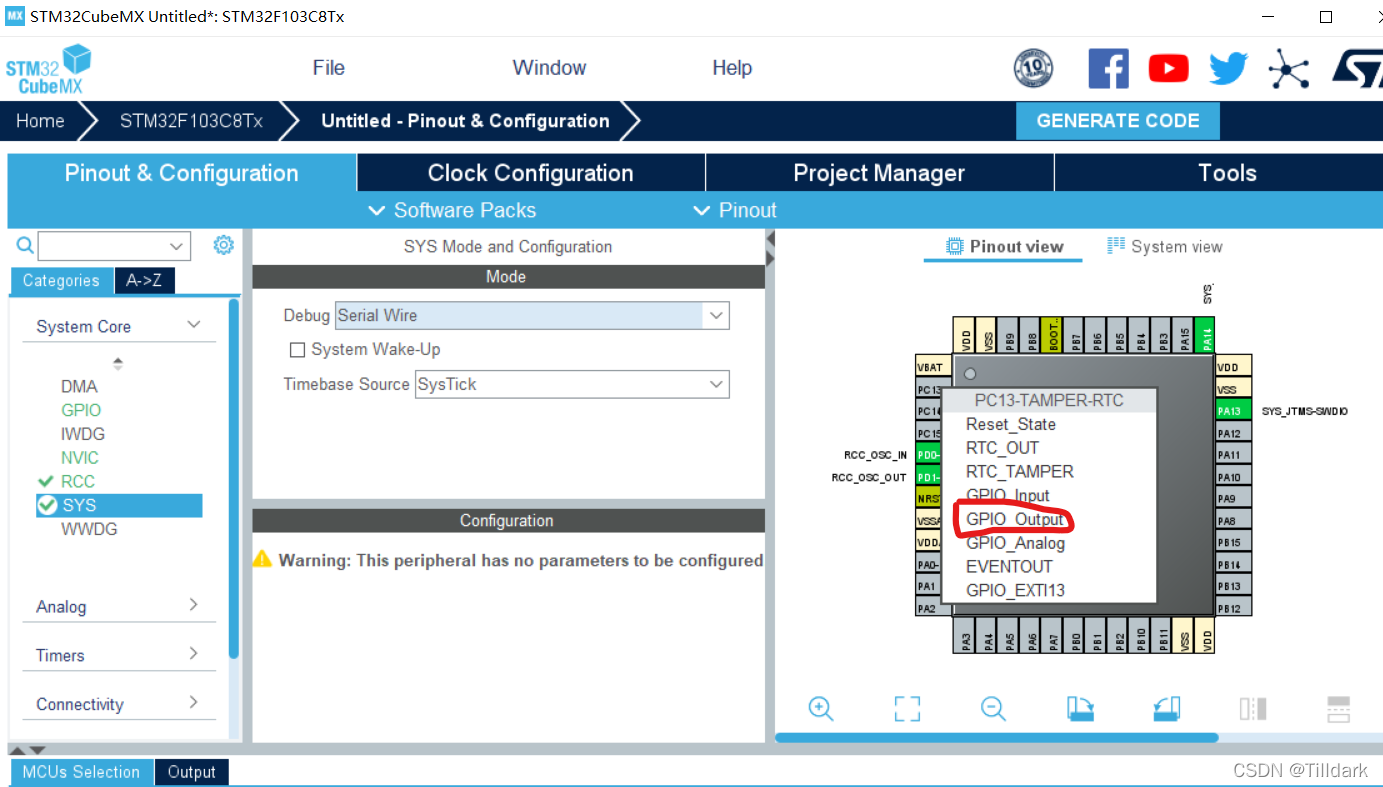
?����PC13ΪGPIO_Output���ڵ���LED��
?Ȼ���ٽ��д���USART1������

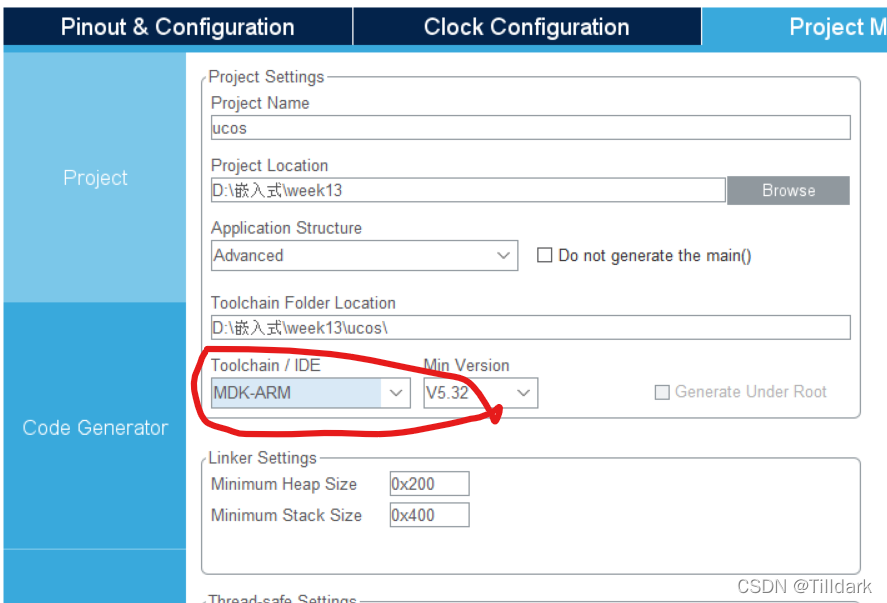
?���֮�������ù���
?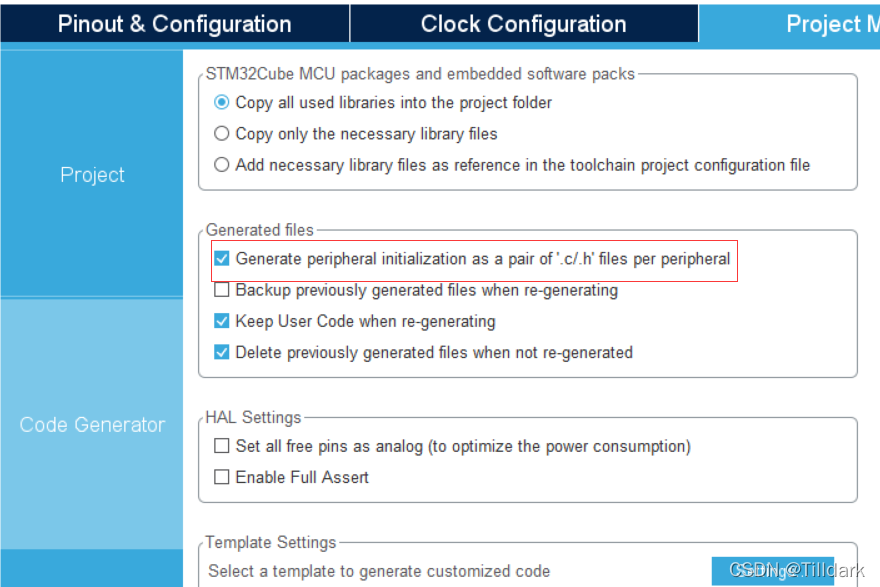
?Ȼ�������ɴ���
֮������main�������������´���
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_SET);
HAL_Delay(500);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_RESET);
HAL_Delay(500);
}
/* USER CODE END 3 */
��֮����б���
������uCOSIIIԴ��
�����������:http://micrium.com/downloadcenter/
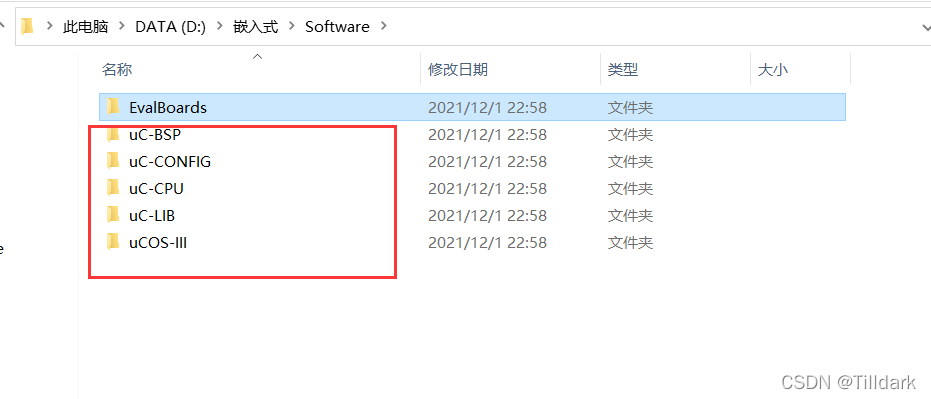
��������ֲ
1��.ΪuC-BSP�ļ����½�bsp.c��bsp.h�ļ�
2�����ļ���uC-CONFIG���������ļ�
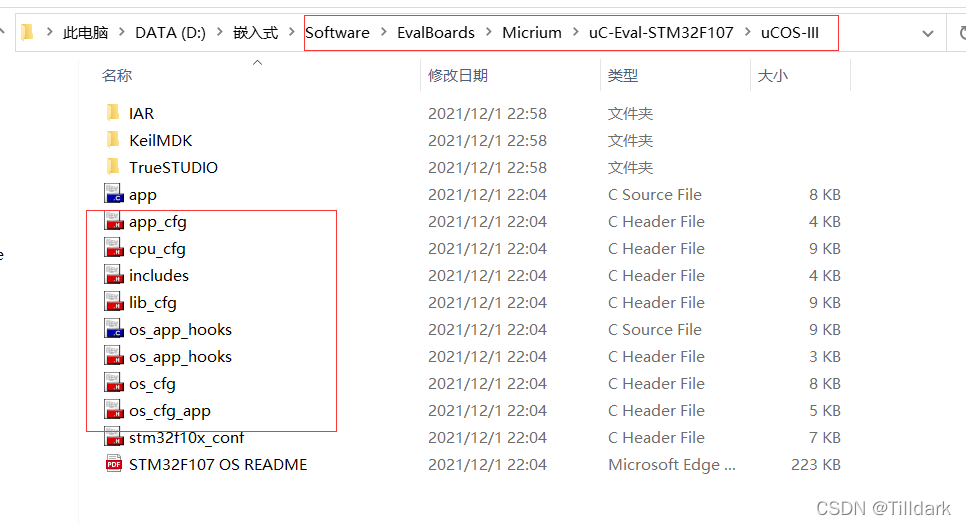
?3.��uCOS����ļ����Ƶ�HAL���̵�MDK-ARM�ļ�����
?��.��ʼ��ֲ
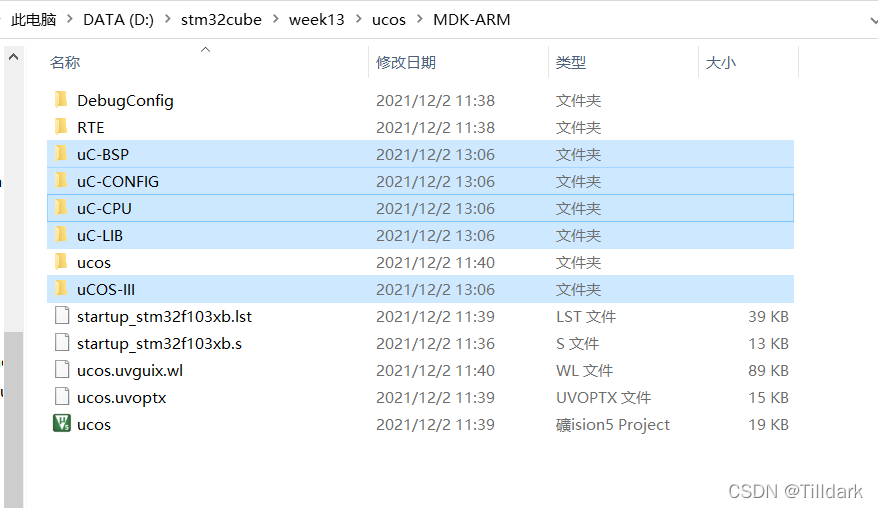
��STM32CUBEMX���ɵĹ���
1.��uCOS�ļ����ӵ���Ŀ
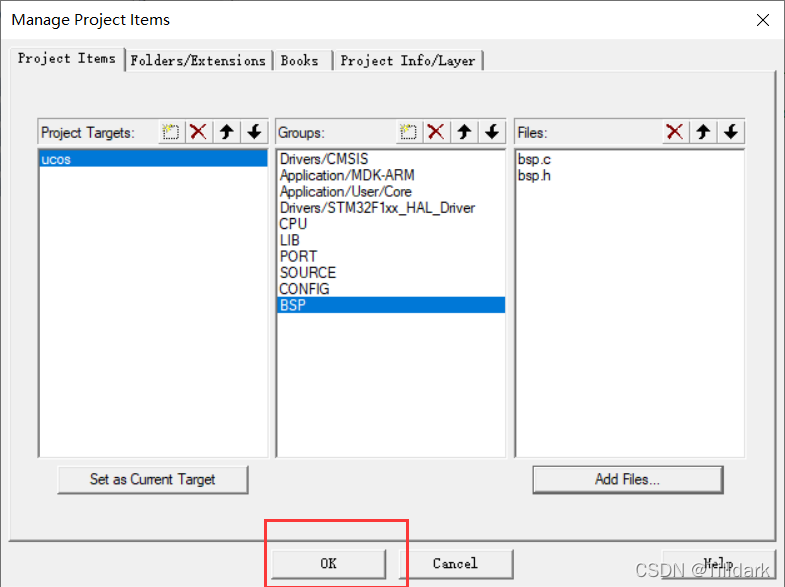
���Manage Project Items

?Ȼ���½���Ŀ�ļ���,��������ͼ��ʾ
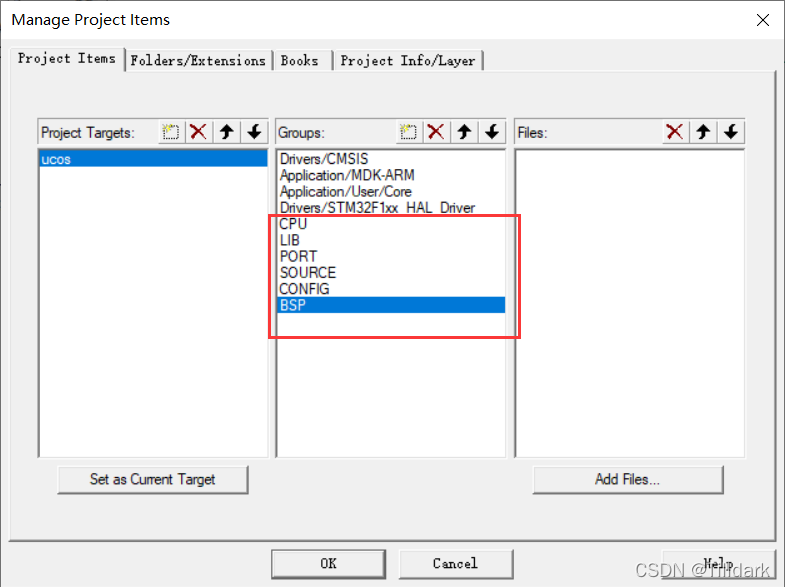
Ȼ��������Ӧ���ļ�
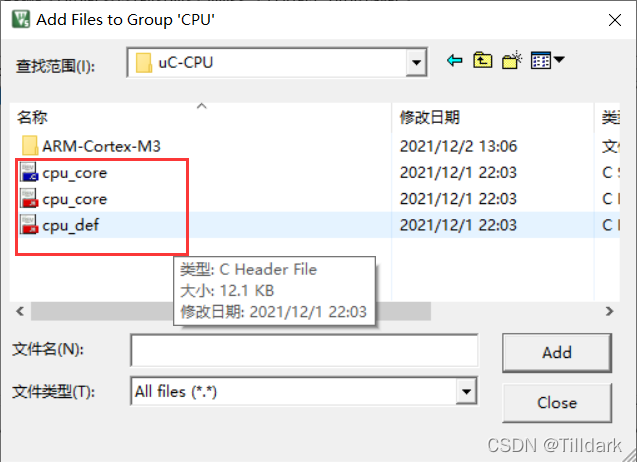
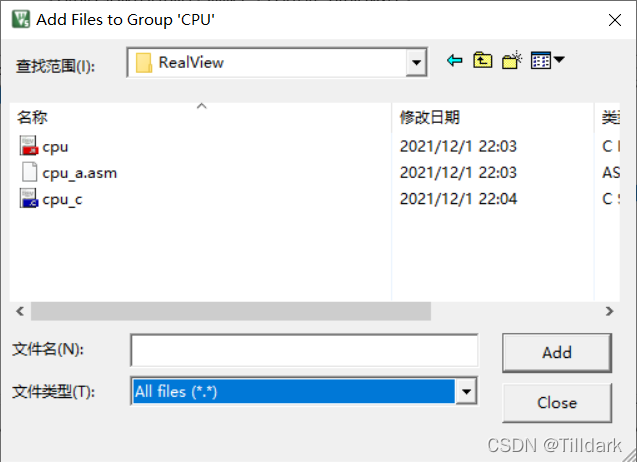
���CPU�C>Add File,ѡ�������ļ���������
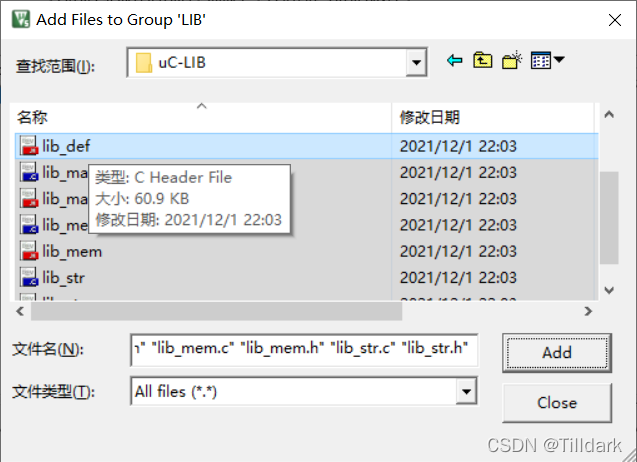
?���LIB�C>Add Files,ѡ�������ļ�,��������
���PORT�C>Add Files,ѡ�������ļ�,��������
?���SOURCE�C>Add Files,ѡ�������ļ�,��������
?���CONFIG�C>Add Files,ѡ�������ļ�,��������

?���BSP�C>Add Files,ѡ�������ļ�,��������
?�������֮��,��סҪ���OK
?�������֮����Ŀ�ṹ�ᷢ���ı����˵���Ѿ����ӳɹ���
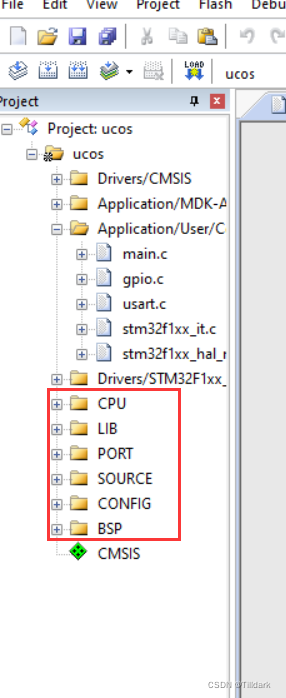
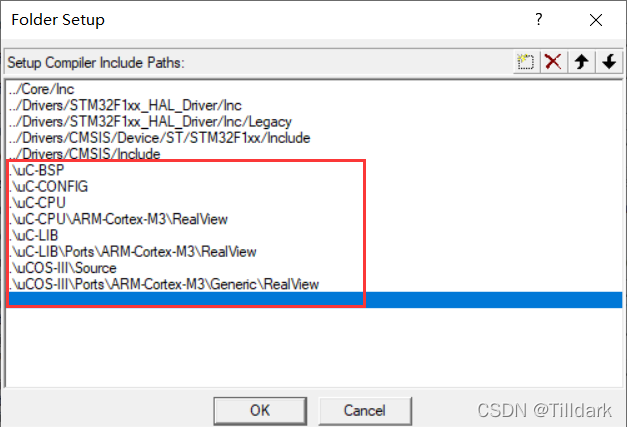
?��һ�����ǾͿ�ʼ�����ļ�·��
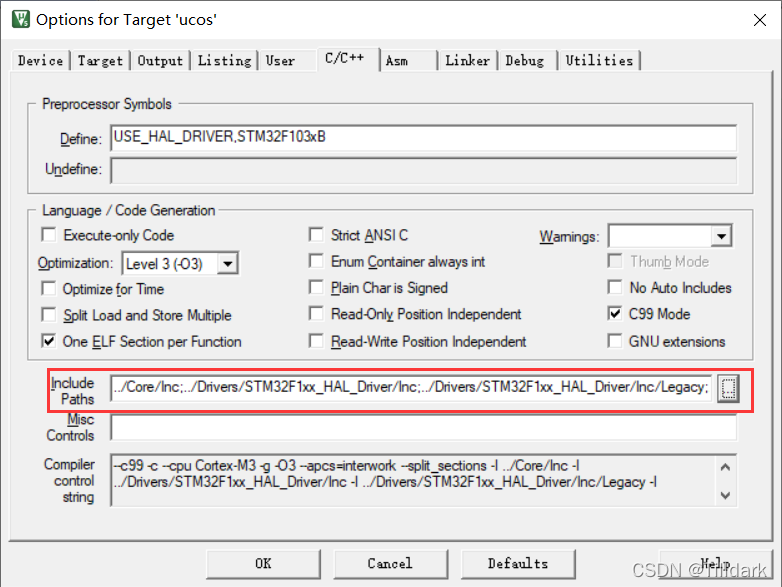
?Ȼ������Ŀ·���½���Ѱ��,�������
?2.Ϊbsp.c��bsp.h���Ӵ���
?�ҵ�BSP�µ�bsp.c��bsp.h�ļ�
���ӵĴ�������
bsp.h
// bsp.h
#ifndef __BSP_H__
#define __BSP_H__
#include "stm32f1xx_hal.h"
void BSP_Init(void);
#endif
bsp.c
// bsp.c
#include "includes.h"
#define DWT_CR *(CPU_REG32 *)0xE0001000
#define DWT_CYCCNT *(CPU_REG32 *)0xE0001004
#define DEM_CR *(CPU_REG32 *)0xE000EDFC
#define DBGMCU_CR *(CPU_REG32 *)0xE0042004
#define DEM_CR_TRCENA (1 << 24)
#define DWT_CR_CYCCNTENA (1 << 0)
CPU_INT32U BSP_CPU_ClkFreq (void)
{
return HAL_RCC_GetHCLKFreq();
}
void BSP_Tick_Init(void)
{
CPU_INT32U cpu_clk_freq;
CPU_INT32U cnts;
cpu_clk_freq = BSP_CPU_ClkFreq();
#if(OS_VERSION>=3000u)
cnts = cpu_clk_freq/(CPU_INT32U)OSCfg_TickRate_Hz;
#else
cnts = cpu_clk_freq/(CPU_INT32U)OS_TICKS_PER_SEC;
#endif
OS_CPU_SysTickInit(cnts);
}
void BSP_Init(void)
{
BSP_Tick_Init();
MX_GPIO_Init();
}
#if (CPU_CFG_TS_TMR_EN == DEF_ENABLED)
void CPU_TS_TmrInit (void)
{
CPU_INT32U cpu_clk_freq_hz;
DEM_CR |= (CPU_INT32U)DEM_CR_TRCENA; /* Enable Cortex-M3's DWT CYCCNT reg. */
DWT_CYCCNT = (CPU_INT32U)0u;
DWT_CR |= (CPU_INT32U)DWT_CR_CYCCNTENA;
cpu_clk_freq_hz = BSP_CPU_ClkFreq();
CPU_TS_TmrFreqSet(cpu_clk_freq_hz);
}
#endif
#if (CPU_CFG_TS_TMR_EN == DEF_ENABLED)
CPU_TS_TMR CPU_TS_TmrRd (void)
{
return ((CPU_TS_TMR)DWT_CYCCNT);
}
#endif
#if (CPU_CFG_TS_32_EN == DEF_ENABLED)
CPU_INT64U CPU_TS32_to_uSec (CPU_TS32 ts_cnts)
{
CPU_INT64U ts_us;
CPU_INT64U fclk_freq;
fclk_freq = BSP_CPU_ClkFreq();
ts_us = ts_cnts / (fclk_freq / DEF_TIME_NBR_uS_PER_SEC);
return (ts_us);
}
#endif
#if (CPU_CFG_TS_64_EN == DEF_ENABLED)
CPU_INT64U CPU_TS64_to_uSec (CPU_TS64 ts_cnts)
{
CPU_INT64U ts_us;
CPU_INT64U fclk_freq;
fclk_freq = BSP_CPU_ClkFreq();
ts_us = ts_cnts / (fclk_freq / DEF_TIME_NBR_uS_PER_SEC);
return (ts_us);
}
#endif
?3.������������
�����������
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "gpio.h"
#include "usart.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <includes.h>
#include "stm32f1xx_hal.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* �������ȼ� */
#define START_TASK_PRIO 3
#define LED0_TASK_PRIO 4
#define MSG_TASK_PRIO 5
/* �����ջ��С */
#define START_STK_SIZE 64
#define LED0_STK_SIZE 64
#define MSG_STK_SIZE 64//����Ѵ�С����ᱨ��,�������Ÿ�Сһ��
/* ����ջ */
CPU_STK START_TASK_STK[START_STK_SIZE];
CPU_STK LED0_TASK_STK[LED0_STK_SIZE];
CPU_STK MSG_TASK_STK[MSG_STK_SIZE];
/* ������ƿ� */
OS_TCB StartTaskTCB;
OS_TCB Led0TaskTCB;
OS_TCB MsgTaskTCB;
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* ���������� */
void start_task(void *p_arg);
static void AppTaskCreate(void);
static void AppObjCreate(void);
static void led_pc13(void *p_arg);
static void send_msg(void *p_arg);
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
OS_ERR err;
OSInit(&err);
HAL_Init();
SystemClock_Config();
//MX_GPIO_Init(); �����BSP�ij�ʼ����Ҳ���ʼ��
MX_USART1_UART_Init();
/* �������� */
OSTaskCreate((OS_TCB *)&StartTaskTCB, /* Create the start task */
(CPU_CHAR *)"start task",
(OS_TASK_PTR ) start_task,
(void *) 0,
(OS_PRIO ) START_TASK_PRIO,
(CPU_STK *)&START_TASK_STK[0],
(CPU_STK_SIZE) START_STK_SIZE/10,
(CPU_STK_SIZE) START_STK_SIZE,
(OS_MSG_QTY ) 0,
(OS_TICK ) 0,
(void *) 0,
(OS_OPT )(OS_OPT_TASK_STK_CHK | OS_OPT_TASK_STK_CLR),
(OS_ERR *)&err);
/* ����������ϵͳ,����Ȩ����uC/OS-III */
OSStart(&err); /* Start multitasking (i.e. give control to uC/OS-III). */
}
void start_task(void *p_arg)
{
OS_ERR err;
CPU_SR_ALLOC();
p_arg = p_arg;
/* YangJie add 2021.05.20*/
BSP_Init(); /* Initialize BSP functions */
//CPU_Init();
//Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); //ͳ������
#endif
#ifdef CPU_CFG_INT_DIS_MEAS_EN //���ʹ���˲����жϹر�ʱ��
CPU_IntDisMeasMaxCurReset();
#endif
#if OS_CFG_SCHED_ROUND_ROBIN_EN //��ʹ��ʱ��Ƭ��ת��ʱ��
//ʹ��ʱ��Ƭ��ת���ȹ���,ʱ��Ƭ����Ϊ1��ϵͳʱ�ӽ���,��1*5=5ms
OSSchedRoundRobinCfg(DEF_ENABLED,1,&err);
#endif
OS_CRITICAL_ENTER(); //�����ٽ���
/* ����LED0���� */
OSTaskCreate((OS_TCB * )&Led0TaskTCB,
(CPU_CHAR * )"led_pc13",
(OS_TASK_PTR )led_pc13,
(void * )0,
(OS_PRIO )LED0_TASK_PRIO,
(CPU_STK * )&LED0_TASK_STK[0],
(CPU_STK_SIZE)LED0_STK_SIZE/10,
(CPU_STK_SIZE)LED0_STK_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )0,
(void * )0,
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,
(OS_ERR * )&err);
/* ����LED1���� */
OSTaskCreate((OS_TCB * )&MsgTaskTCB,
(CPU_CHAR * )"send_msg",
(OS_TASK_PTR )send_msg,
(void * )0,
(OS_PRIO )MSG_TASK_PRIO,
(CPU_STK * )&MSG_TASK_STK[0],
(CPU_STK_SIZE)MSG_STK_SIZE/10,
(CPU_STK_SIZE)MSG_STK_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )0,
(void * )0,
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,
(OS_ERR * )&err);
OS_TaskSuspend((OS_TCB*)&StartTaskTCB,&err); //����ʼ����
OS_CRITICAL_EXIT(); //�����ٽ���
}
/**
* ��������: �����������塣
* �������: p_arg ���ڴ���������ʱ���ݵ��β�
* �� �� ֵ: ��
* ˵ ��:��
*/
static void led_pc13 (void *p_arg)
{
OS_ERR err;
(void)p_arg;
BSP_Init(); /* Initialize BSP functions */
CPU_Init();
Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); /* Compute CPU capacity with no task running */
#endif
CPU_IntDisMeasMaxCurReset();
AppTaskCreate(); /* Create Application Tasks */
AppObjCreate(); /* Create Application Objects */
while (DEF_TRUE)
{
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_13,GPIO_PIN_RESET);
OSTimeDlyHMSM(0, 0, 0, 500,OS_OPT_TIME_HMSM_STRICT,&err);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_13,GPIO_PIN_SET);
OSTimeDlyHMSM(0, 0, 0, 500,OS_OPT_TIME_HMSM_STRICT,&err);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
static void send_msg (void *p_arg)
{
OS_ERR err;
(void)p_arg;
BSP_Init(); /* Initialize BSP functions */
CPU_Init();
Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); /* Compute CPU capacity with no task running */
#endif
CPU_IntDisMeasMaxCurReset();
AppTaskCreate(); /* Create Application Tasks */
AppObjCreate(); /* Create Application Objects */
while (DEF_TRUE)
{
printf("hello world \r\n");
OSTimeDlyHMSM(0, 0, 0, 500,OS_OPT_TIME_HMSM_STRICT,&err);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/* USER CODE BEGIN 4 */
/**
* ��������: ����Ӧ������
* �������: p_arg ���ڴ���������ʱ���ݵ��β�
* �� �� ֵ: ��
* ˵ ��:��
*/
static void AppTaskCreate (void)
{
}
/**
* ��������: uCOSIII�ں˶���
* �������: ��
* �� �� ֵ: ��
* ˵ ��:��
*/
static void AppObjCreate (void)
{
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
4.�Բ��ִ��������
��startup�ļ�
������λ�ý�����
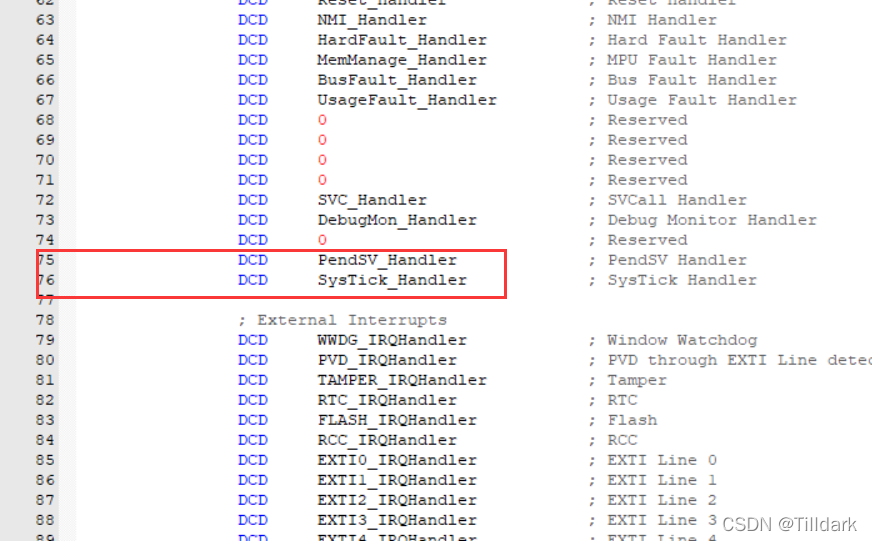
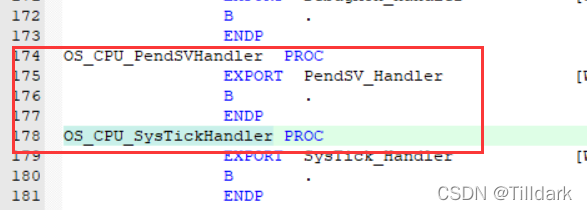
?������������
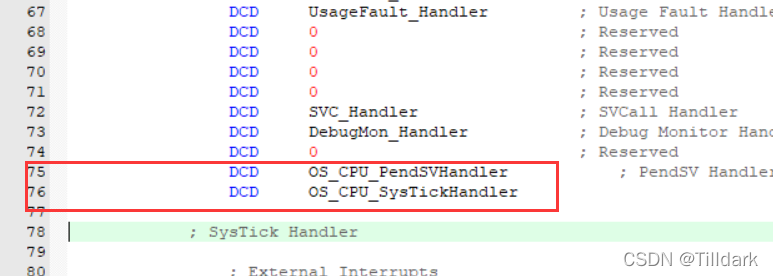
?ͬ����������

?��Ϊ
?Ȼ����CONFIG��app_cfg������
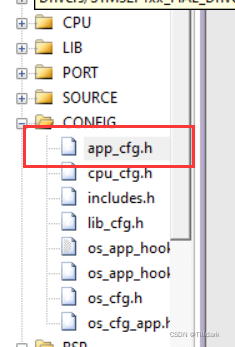
�����µĴ��������

?��DEF_ENABLED��ΪDEF_DISALED

?�ٶ�����Ĵ��������
?�����Ϊ#define APP_TRACE(void)
�ҵ��ļ�includes.h
��#include <bsp.h>������
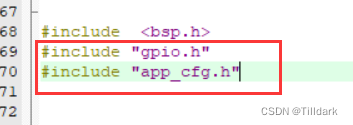
�ٽ�

��Ϊ������ʾ

���ҵ�lib_cfg.h?
���˴���Сһ��?

?�����Ҫ��usart.c�ļ����������´������printf�ض���
/* USER CODE BEGIN 1 */
#include<stdio.h>
int fputc(int ch,FILE *f){
HAL_UART_Transmit(&huart1,(uint8_t *)&ch,1,0xffff);
return ch;
}
/* USER CODE END 1 */
?�����������

?�������֮��ͽ��б���,Ȼ������¼��оƬ�С�
5�������ʾ
���ڵ������ֽ������
?�塢ʵ����������
3������(task):��������task�ֱ���1s��3s���ڶ�LED�Ƚ��е���-Ϩ��Ŀ���;����һ��task��2s����ͨ�����ڷ��͡�hello uc/OS! ��ӭ����RTOS������!��
��gpio.c�еĴ���
void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_3, GPIO_PIN_RESET);
/*Configure GPIO pin : PC13|PA3 */
GPIO_InitStruct.Pin = GPIO_PIN_13|GPIO_PIN_3;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
��main.c�еĴ���
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* �������ȼ� */
#define START_TASK_PRIO 3
#define LED0_TASK_PRIO 4
#define MSG_TASK_PRIO 5
#define LED1_TASK_PRIO 6
/* �����ջ��С */
#define START_STK_SIZE 96
#define LED0_STK_SIZE 64
#define MSG_STK_SIZE 64
#define LED1_STK_SIZE 64
/* ����ջ */
CPU_STK START_TASK_STK[START_STK_SIZE];
CPU_STK LED0_TASK_STK[LED0_STK_SIZE];
CPU_STK MSG_TASK_STK[MSG_STK_SIZE];
CPU_STK LED1_TASK_STK[LED1_STK_SIZE];
/* ������ƿ� */
OS_TCB StartTaskTCB;
OS_TCB Led0TaskTCB;
OS_TCB MsgTaskTCB;
OS_TCB Led1TaskTCB;
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* ���������� */
void start_task(void *p_arg);
static void AppTaskCreate(void);
static void AppObjCreate(void);
static void led_pc13(void *p_arg);
static void send_msg(void *p_arg);
static void led_pa3(void *p_arg);
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
OS_ERR err;
OSInit(&err);
HAL_Init();
SystemClock_Config();
//MX_GPIO_Init(); �����BSP�ij�ʼ����Ҳ���ʼ��
MX_USART1_UART_Init();
/* �������� */
OSTaskCreate((OS_TCB *)&StartTaskTCB, /* Create the start task */
(CPU_CHAR *)"start task",
(OS_TASK_PTR ) start_task,
(void *) 0,
(OS_PRIO ) START_TASK_PRIO,
(CPU_STK *)&START_TASK_STK[0],
(CPU_STK_SIZE) START_STK_SIZE/10,
(CPU_STK_SIZE) START_STK_SIZE,
(OS_MSG_QTY ) 0,
(OS_TICK ) 0,
(void *) 0,
(OS_OPT )(OS_OPT_TASK_STK_CHK | OS_OPT_TASK_STK_CLR),
(OS_ERR *)&err);
/* ����������ϵͳ,����Ȩ����uC/OS-III */
OSStart(&err); /* Start multitasking (i.e. give control to uC/OS-III). */
}
void start_task(void *p_arg)
{
OS_ERR err;
CPU_SR_ALLOC();
p_arg = p_arg;
/* YangJie add 2021.05.20*/
BSP_Init(); /* Initialize BSP functions */
//CPU_Init();
//Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); //ͳ������
#endif
#ifdef CPU_CFG_INT_DIS_MEAS_EN //���ʹ���˲����жϹر�ʱ��
CPU_IntDisMeasMaxCurReset();
#endif
#if OS_CFG_SCHED_ROUND_ROBIN_EN //��ʹ��ʱ��Ƭ��ת��ʱ��
//ʹ��ʱ��Ƭ��ת���ȹ���,ʱ��Ƭ����Ϊ1��ϵͳʱ�ӽ���,��1*5=5ms
OSSchedRoundRobinCfg(DEF_ENABLED,1,&err);
#endif
OS_CRITICAL_ENTER(); //�����ٽ���
/* ����LED0���� */
OSTaskCreate((OS_TCB * )&Led0TaskTCB,
(CPU_CHAR * )"led_pc13",
(OS_TASK_PTR )led_pc13,
(void * )0,
(OS_PRIO )LED0_TASK_PRIO,
(CPU_STK * )&LED0_TASK_STK[0],
(CPU_STK_SIZE)LED0_STK_SIZE/10,
(CPU_STK_SIZE)LED0_STK_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )0,
(void * )0,
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,
(OS_ERR * )&err);
/* ����LED1���� */
OSTaskCreate((OS_TCB * )&Led1TaskTCB,
(CPU_CHAR * )"led_pa3",
(OS_TASK_PTR )led_pa3,
(void * )0,
(OS_PRIO )LED1_TASK_PRIO,
(CPU_STK * )&LED1_TASK_STK[0],
(CPU_STK_SIZE)LED1_STK_SIZE/10,
(CPU_STK_SIZE)LED1_STK_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )0,
(void * )0,
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,
(OS_ERR * )&err);
/* ����MSG���� */
OSTaskCreate((OS_TCB * )&MsgTaskTCB,
(CPU_CHAR * )"send_msg",
(OS_TASK_PTR )send_msg,
(void * )0,
(OS_PRIO )MSG_TASK_PRIO,
(CPU_STK * )&MSG_TASK_STK[0],
(CPU_STK_SIZE)MSG_STK_SIZE/10,
(CPU_STK_SIZE)MSG_STK_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )0,
(void * )0,
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,
(OS_ERR * )&err);
OS_TaskSuspend((OS_TCB*)&StartTaskTCB,&err); //����ʼ����
OS_CRITICAL_EXIT(); //�����ٽ���
}
/**
* ��������: �����������塣
* �������: p_arg ���ڴ���������ʱ���ݵ��β�
* �� �� ֵ: ��
* ˵ ��:��
*/
static void led_pc13 (void *p_arg)
{
OS_ERR err;
(void)p_arg;
BSP_Init(); /* Initialize BSP functions */
CPU_Init();
Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); /* Compute CPU capacity with no task running */
#endif
CPU_IntDisMeasMaxCurReset();
AppTaskCreate(); /* Create Application Tasks */
AppObjCreate(); /* Create Application Objects */
while (DEF_TRUE)
{
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_13,GPIO_PIN_RESET);
OSTimeDlyHMSM(0, 0, 1, 0,OS_OPT_TIME_HMSM_STRICT,&err);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_13,GPIO_PIN_SET);
OSTimeDlyHMSM(0, 0, 1, 0,OS_OPT_TIME_HMSM_STRICT,&err);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
static void led_pa3 (void *p_arg)
{
OS_ERR err;
(void)p_arg;
BSP_Init(); /* Initialize BSP functions */
CPU_Init();
Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); /* Compute CPU capacity with no task running */
#endif
CPU_IntDisMeasMaxCurReset();
AppTaskCreate(); /* Create Application Tasks */
AppObjCreate(); /* Create Application Objects */
while (DEF_TRUE)
{
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_3,GPIO_PIN_RESET);
OSTimeDlyHMSM(0, 0, 3, 0,OS_OPT_TIME_HMSM_STRICT,&err);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_3,GPIO_PIN_SET);
OSTimeDlyHMSM(0, 0, 3, 0,OS_OPT_TIME_HMSM_STRICT,&err);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
static void send_msg (void *p_arg)
{
OS_ERR err;
(void)p_arg;
BSP_Init(); /* Initialize BSP functions */
CPU_Init();
Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); /* Compute CPU capacity with no task running */
#endif
CPU_IntDisMeasMaxCurReset();
AppTaskCreate(); /* Create Application Tasks */
AppObjCreate(); /* Create Application Objects */
while (DEF_TRUE)
{
printf("hello uc/OS \r\n");
OSTimeDlyHMSM(0, 0, 2, 0,OS_OPT_TIME_HMSM_STRICT,&err);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/* USER CODE BEGIN 4 */
/**
* ��������: ����Ӧ������
* �������: p_arg ���ڴ���������ʱ���ݵ��β�
* �� �� ֵ: ��
* ˵ ��:��
*/
static void AppTaskCreate (void)
{
}
/**
* ��������: uCOSIII�ں˶���
* �������: ��
* �� �� ֵ: ��
* ˵ ��:��
*/
static void AppObjCreate (void)
{
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
Ȼ����֮��Ĵ�����б���,��¼��оƬ����
?�����ʾ

����ʹ���������ǹ۲첨��
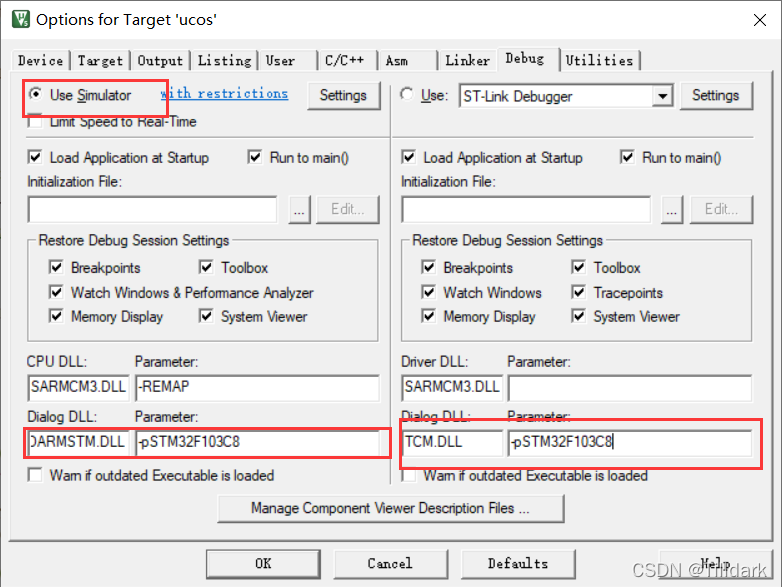
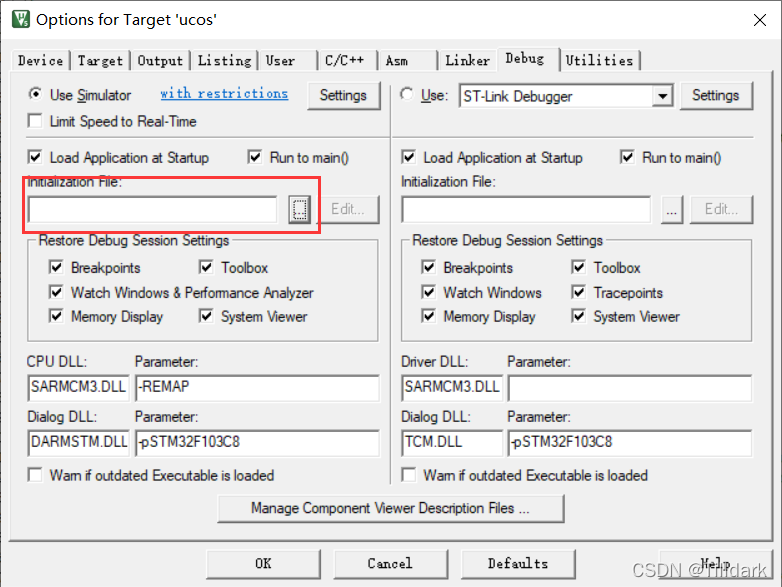
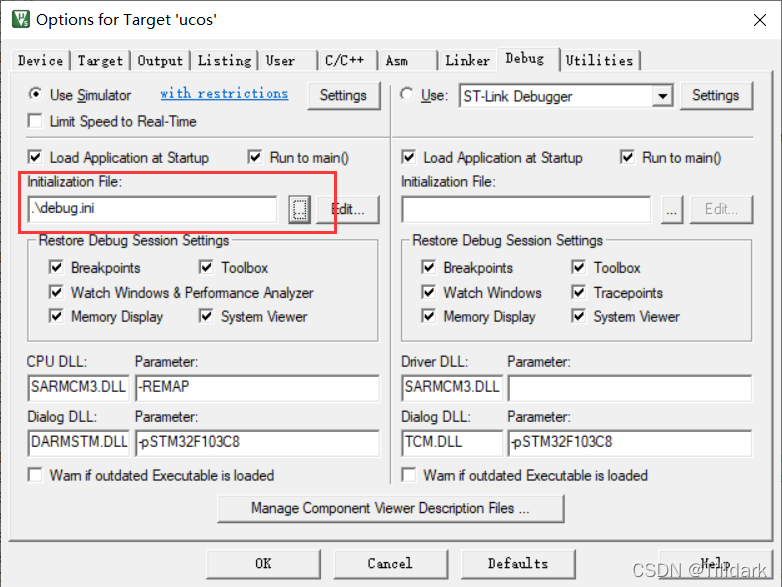
1.ʹ��KEIL�����������
������MDK-ARM�½�һ��TXT�ļ�,�������´���
map 0x40000000, 0x40007FFF read write // APB1
map 0x40010000, 0x400157FF read write // APB2
map 0x40020000, 0x4007FFFF read write // AHB1
map 0x50000000, 0x50060BFF read write // AHB2
map 0x60000000, 0x60000FFF read write // AHB3
map 0xE0000000, 0xE00FFFFF read write // CORTEX-M4 internal peripherals������ļ��ĺ���Ϊini
Ȼ������빤�̵���
?
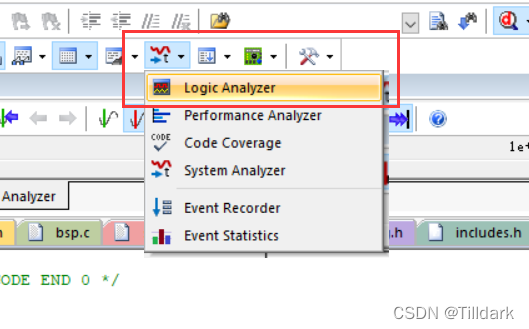
?Ȼ����KEIL����ķ���������
�Ƚ�����������е���
Ȼ������������
?Ȼ����setup
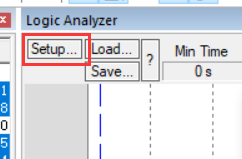
?�������źʹ���
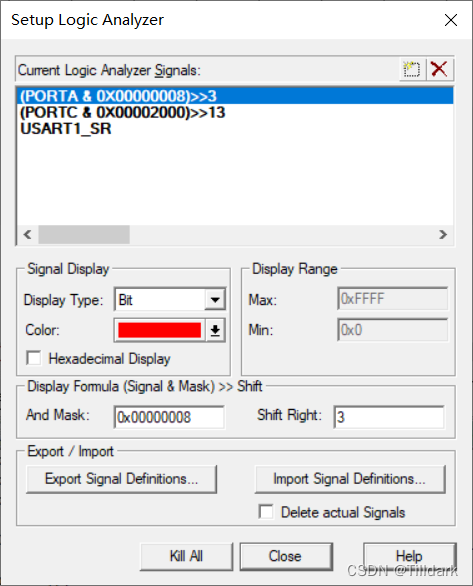
Ȼ����RUN
 ?
?
?
�������
�۲�����IJ��ο�֪PC13�IJ�������ÿ����һ�η���һ������Ҳ�������Ǵ���������,Ҳ����HELLO UC/OS�ͼ��Ͽ�ʼλ,ֹͣλ,��ֹλ��PC13 ���������ƽ����Ϊ 1s,PA3 ���������ƽ����Ϊ 3s,�����������Ϊ 2s��
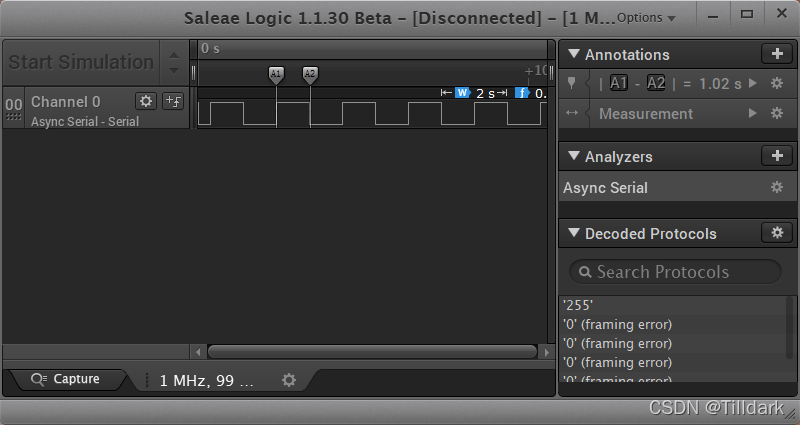
2��ʹ����ʵ���Dz���SaleaeLogic16 �۲Ⲩ��
��������SaleaeLogic16���ڹ۲��������
?���ذ�װ���֮��������Ƚ��л���������
����ѡ����ʾģʽͨ��
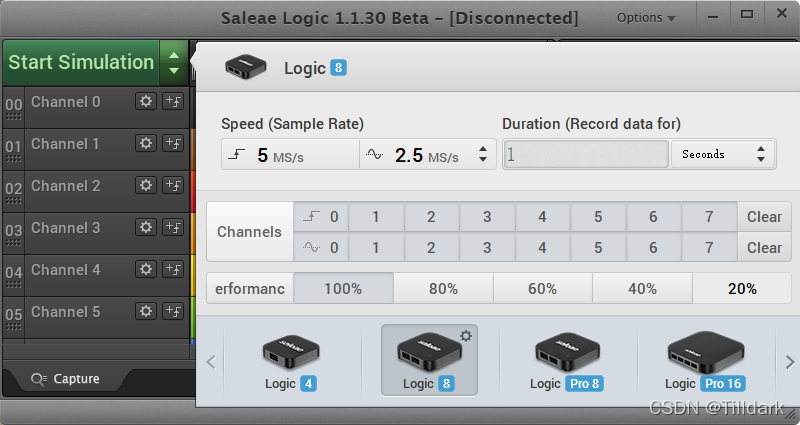
Ȼ������ÿ��ͨ���IJ��η�ֵ����
 ?
?
?Ȼ��ѡ����ʽ
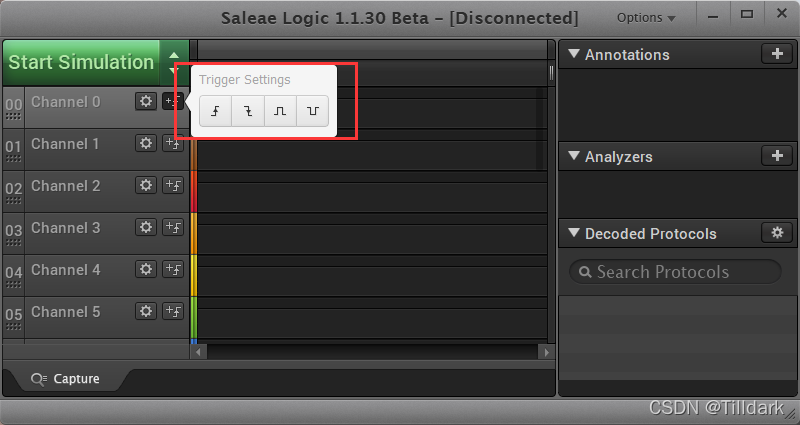
?ѡ���źŹ۲�
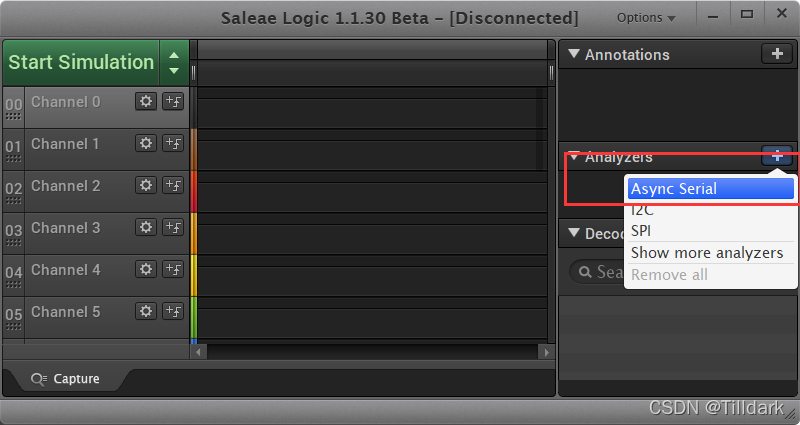
?���������Ҫ��ͨ���۲⡣
Ȼ�����������ǽ�������,������������
�������� ? ? ? ? ? ?STM32F103
CH0 ? ? ? ? ? ? ? ? ? ? ? ? ? PA9
CH1 ? ? ? ? ? ? ? ? ? ? ? ? ? PC13
CH2 ? ? ? ? ? ? ? ? ? ? ? ?PA3
GND ? ? ? ? ? ? ? ? ? ?GND
Ȼ������ǵĵõ��IJ��ν��з���
?���Ǵ����е�PA3���ŵ�LED�Ƶ�����Ϊ3Sһ��,����ͼ���Եó�����Ϊ3S���ҵ��ǻ��Ǵ�����һ������
?�����е�PC13���ŵ�LED�Ƶ�����Ϊ1Sһ��,����ͼ�ϵõ�����Ϊ1S����һ�Ρ�
���ڲ���

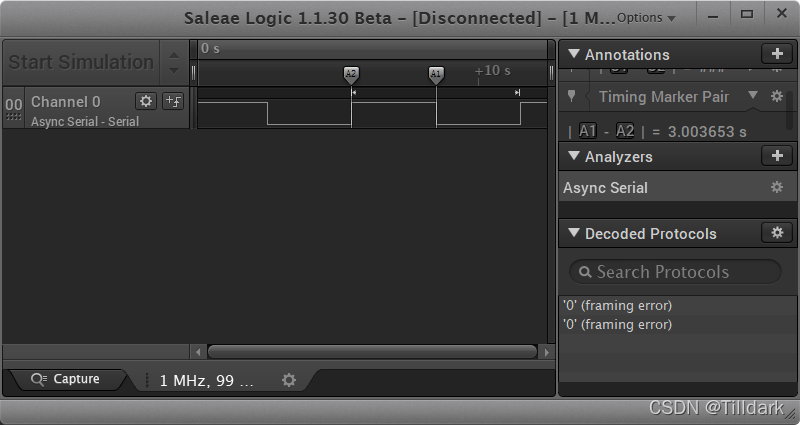
UART ʹ�õ����첽����ͨ�š�
�첽ͨ����һ���ַ�Ϊ���䵥λ,ͨ���������ַ����ʱ���������Dz��̶���,Ȼ����ͬһ���ַ��е���������λ���ʱ�����ǹ̶��ġ�
����ͨ��Э�����ݴ���ʱ,ÿһ���ַ�Ϊ 10 λ(1 ����ʼλ,7 ������λ,1 ��У��λ,1 ������λ):
��ʼλ���ȷ���һ������ 0 ���ź�,��ʾ�����ַ��Ŀ�ʼ;
����������� 5~8 ��� 0 ���� 1 ��;
У��λ������λ������һλ��,ʹ�á� 1 ����λ��ӦΪż��(żУ��)������(��У��);
ֹͣλ������һ���ַ����ݵĽ�����־�������� 1 λ��1.5 λ��2 λ�ĸߵ�ƽ;
����λ���������� 1 ��״̬,��ʾ��ǰ��·��û�����ϴ��͡�
���������ǵIJ��ο��Կ���,ÿһ���ַ�Ϊ 10 λ,��һ������ 0 ������ʼλ,7 λ����λ,1 Ϊ��żУ��λ,1 λ�ߵ�ƽֹͣλ,1 Ϊ�������� 1 ���Ŀ���λ�����е�����λ:1101000 ��ʮ�������� 0x68��
?�ߡ��ܽ�
�ڱ��ε�ʵ������ѧ���������ֲucos,��ֲ�Ĺ������Ը���ӴҪϸ�ĵ�,�����Ӵ����ʱ���Ҫ��ϸ����λ��,���ʵ��Ĺ�����Ҳ�ܹ�ѧ������Ķ��������Լ�Ҳ���ںܶ�IJ���,����Ŭ��,Ҳ���λ���и�����
�ˡ��ο�����
https://blog.csdn.net/m0_58892312/article/details/121627183?spm=1001.2014.3001.5501
https://blog.csdn.net/qq_45659777/article/details/121570886?