硬件设计
上一篇咱们讲了基于数码管显示的液位检测,本章讲一下基于LCD1602显示的液位检测,同时伴有温度测量。该系统可应用于鱼缸、水塔、水箱的检测。本系统液位检测方案是基于液位传感器,通过传感器嵌入液体反馈回电信号,通过电信号的大小可以反算出液位的大小,该方案的有点事成本低、简单,缺点是测量高度有限。(对于高液位的测量,下一篇咱们再讲一讲基于超声波测距的液位检测系统)
仿真图1:
LCD1602作为显示器,ADC芯片采用PCF8591,DS18B20作为温度传感器,滑动变阻器模拟液面。

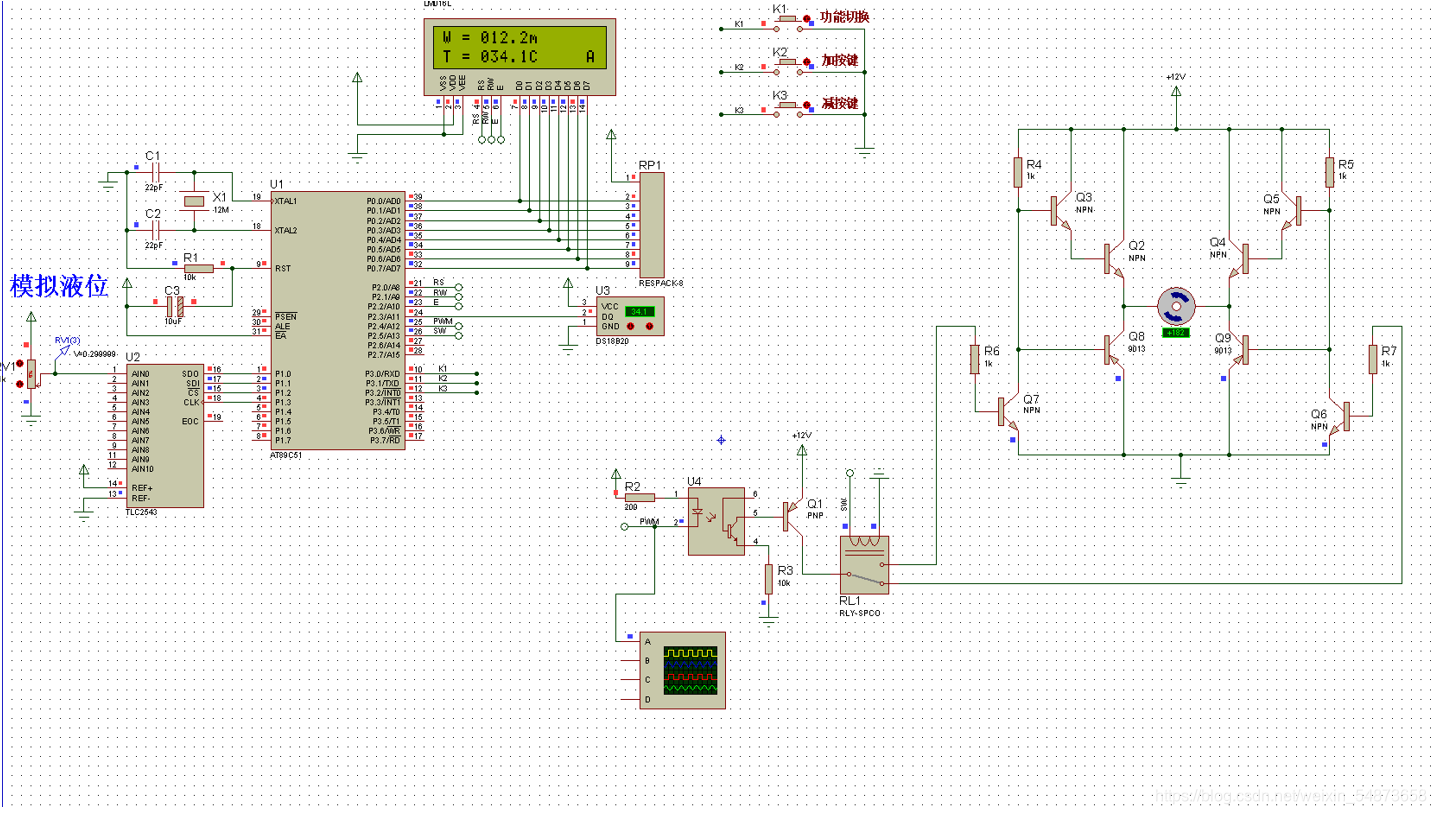
仿真图2:
由LCD1602作为显示器,ADC芯片采用TLC2543,DS18B20作为温度传感器,滑动变阻器模拟液面,三个按键作为设置和切换功能,显示温度、液位、预设值、水流速。
此时的温度和液位,当液位低于或者高于设定范围,电机工作。
水流速显示:

程序设计
#include <reg51.h>
#include <DS18B20.h>
#include <LCD1602.h>
#include <TLC2543.h>
#define uchar unsigned char
#define uint unsigned int
sbit PWM=P2^4; //电机PWM输出端口
sbit SW=P2^5; //电机正反转控制端口
sbit K1=P3^0; //功能设置按键
sbit K2=P3^1; //加按键
sbit K3=P3^2; //减按键
uchar ratio=10; //PWM占空比
uchar count=0; //PWM定时计数
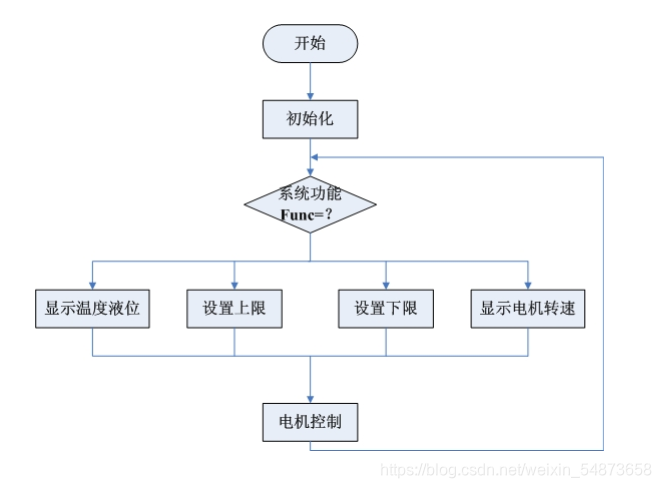
uchar func=0; //系统功能,0当前状态,1上下限设置,2电机转速
uchar high=150,low=50,height=0;
uchar LCD_Buf1[16]={"W = 000.0m"};
uchar LCD_Buf2[16]={"T = 000.0C"};
uchar LCD_Buf3[16]={"H = 150.0m"};
uchar LCD_Buf4[16]={"L = 050.0m"};
uchar LCD_Buf5[16]={"Full = 384r/m"};
uchar LCD_Buf6[16]={"Now = 000r/m"};
//------------------------------------------------------
//显示温度及液位
//------------------------------------------------------
void Display_HT(void)
{
uint volt,t;
//电压值显示数据处理
volt=TLC2543(0)*50.0/4095*102.3/2.5;
LCD_Buf1[4]=volt/1000+'0';
LCD_Buf1[5]=volt/100%10+'0';
LCD_Buf1[6]=volt/10%10+'0';
LCD_Buf1[8]=volt%10+'0';
//温度值显示数据处理
t=ReadTemperature();
LCD_Buf2[4]=t/1000+'0';
LCD_Buf2[5]=t/100%10+'0';
LCD_Buf2[6]=t/10%10+'0';
LCD_Buf2[8]=t%10+'0';
LCD_Buf2[15]='A';
//刷新LCD数据
LCD_Display_String(0,0,LCD_Buf1);
LCD_Display_String(0,1,LCD_Buf2);
}
//------------------------------------------------------
//上限设置程序
//------------------------------------------------------
void High_Set()
{
uint x;
if(K2==0) //加按键
{ Delay(10);
if((K2==0)&&(high<102))
high++;
while(K2==0);
}
if(K3==0) //减按键
{ Delay(10);
if((K3==0)&&(high>low))
high--;
while(K3==0);
}
//上限显示数据处理
x=high*10;
LCD_Buf3[4]=x/1000+'0';
LCD_Buf3[5]=x/100%10+'0';
LCD_Buf3[6]=x/10%10+'0';
LCD_Buf3[8]=x%10+'0';
LCD_Buf4[15]='B';
//刷新LCD数据
LCD_Display_String(0,0,LCD_Buf3);
LCD_Display_String(0,1,LCD_Buf4);
}
//------------------------------------------------------
//下限设置程序
//------------------------------------------------------
void Low_Set()
{
uint x;
if(K2==0) //加按键
{ Delay(10);
if((K2==0)&&(low<high))
low++;
while(K2==0);
}
if(K3==0) //减按键
{ Delay(10);
if((K3==0)&&(low>1))
low--;
while(K3==0);
}
//下限显示数据处理
x=low*10;
LCD_Buf4[4]=x/1000+'0';
LCD_Buf4[5]=x/100%10+'0';
LCD_Buf4[6]=x/10%10+'0';
LCD_Buf4[8]=x%10+'0';
LCD_Buf4[15]='C';
//刷新LCD数据
LCD_Display_String(0,0,LCD_Buf3);
LCD_Display_String(0,1,LCD_Buf4);
}
//------------------------------------------------------
//显示电机全速与当前转速
//------------------------------------------------------
void Display_Motor()
{
uint x;
//电机当前转速显示数据处理
switch(ratio)
{
case 100: x=384;break;
case 43: x=192;break;
case 26: x=115;break;
case 0: x=0;
}
LCD_Buf6[7]=x/100+'0';
LCD_Buf6[8]=x/10%10+'0';
LCD_Buf6[9]=x%10+'0';
LCD_Buf6[15]='D';
//刷新LCD数据
LCD_Display_String(0,0,LCD_Buf5);
LCD_Display_String(0,1,LCD_Buf6);
}
//------------------------------------------------------
//K1按键扫描及系统功能
//------------------------------------------------------
void Func_Choice()
{
if(K1==0)
{ Delay(10);
if(K1==0)
func=(++func)%4;
while(K1==0);
}
switch(func)
{
case 0: Display_HT();break;
case 1: High_Set();break;
case 2: Low_Set();break;
case 3: Display_Motor();
}
}
//------------------------------------------------------
//电机转速和转向控制
//------------------------------------------------------
void Motor()
{
uchar l;
l=TLC2543(0)*5.0/4095*102.3/2.5;
if(l<low) //低于下限正转
{
SW=0;
if(l<low*0.1) ratio=100;
if((l>=low*0.1)&&(l<low*0.3)) ratio=42;
if(l>=low*0.3) ratio=26;
}
else if(l>high) //高于上限反转
{
SW=1;
if(l<high+(204.7-high)*0.7) ratio=26;
if((l>=high+(204.7-high)*0.7)&&(l<high+(204.7-high)*0.9)) ratio=43;
if(l>=high+(204.7-high)*0.9) ratio=100;
}
else
ratio=0;
}
//------------------------------------------------------
//定时中断初始化程序
//------------------------------------------------------
void T0_Init()
{
TMOD=0x01; //设置T0工作方式2
TH0=(65535-500)/256; //定时1000us
TL0=(65536-500)%256;
EA=1; //开T0中断
ET0=1;
TR0=1; //启动定时
}
//------------------------------------------------------
//T0中断服务程序
//------------------------------------------------------
void Timer0() interrupt 1
{
TH0=(65535-500)/256; //定时1000us
TL0=(65536-500)%256;
if(ratio==0) PWM=1;
else if(ratio==100) PWM=0;
else
{ count++;
if(count==100) count=0;
if(count==1) PWM=0;
else if(count==(ratio+1)) PWM=1;
}
}
void main()
{
LCD_Init(); //液晶显示器初始化
T0_Init(); //中断初始化
while(1)
{
Func_Choice(); //系统功能选择
Motor(); //电机控制
}
}