����һ�½���,�������ڵ���ʱʹ�õ���������ʱ,��������CPU �յ����ﵽ��ʱ��Ч����ʹ��RTOS �ĺܴ����ƾ���ե��CPU ������,��Զ������������,���������Ҫ��ʱҲ�Ͳ�������CPU �յ���ʵ����ʱ��Ч����
1��ʲô��������ʱ?
������ʱ���ǵ�������Ҫ��ʱ��ʱ��,��������CPU ��ʹ��Ȩ,CPU ����ȥ������������,��������ʱʱ�䵽,���»�ȡ CPU ʹ��Ȩ,�����������,�����ͳ�ֵ�������CPU ����Դ,�����Ǹɵ��š�
2��ʲô�ǿ�������?
��������Ҫ��ʱ,��������״̬,�� CPU ��ȥ��ʲô������?���û�����������������,RTOS ͨ����Ϊ CPU ����һ����������,���ʱ�� CPU �����п��������� ��C/OS-III ��,����������ϵͳ�ڳ�ʼ����ʱ�������ȼ���͵�����,������������ܼ�,ֻ�Ƕ�һ��ȫ�ֱ������м��������ڿ����������������,��ʵ��Ӧ����,��ϵͳ������������ʱ��,���ڿ����������õ�Ƭ�����������ߵ��ĵȲ�����
��C/OS�е�����ϵͳ����ֱ��ǿ��������ͳ������
3��ʵ�ֿ�������
1�������������ջ
��������ջ�� os_cfg_app.c(os_cfg_app.c ��һ��ʹ����Ҫ�������ļ��� ��C/OS-IIISource ���½������ӵ����̵Ħ�C/OS-III Source ��)�ļ��ж��塣
CPU_STK OSCfg_IdleTaskStk [OS_CFG_IDLE_TASK_STK_SIZE];
������ os_cfg_app.h ��
#ifndef OS_CFG_APP_H
#define OS_CFG_APP_H
/*
************************************************************************************************************************
* ����
************************************************************************************************************************
*/
/* ���������ջ��С */
#define OS_CFG_IDLE_TASK_STK_SIZE 128u
#endif /* OS_CFG_APP_H */
���������ջ��һ������õ�����, ��С��OS_CFG_IDLE_TASK_STK_SIZE ����������ơ�OS_CFG_IDLE_TASK_STK_SIZE ��os_cfg_app.h ���ͷ�ļ�����,��СΪ128�ֽڡ�
����������ͨ����һ����һ���� ���������ջ����ʼ��ַ�ʹ�С���������һ������,���ܱ��ġ� �� os_cfg_app.c �ļ��н��ж��塣
/*
************************************************************************************************************************
* CONSTANTS
************************************************************************************************************************
*/
/* ���������ջ��ʼ��ַ */
CPU_STK * const OSCfg_IdleTaskStkBasePtr = (CPU_STK *)&OSCfg_IdleTaskStk[0];
/* ���������ջ��С */
CPU_STK_SIZE const OSCfg_IdleTaskStkSize = (CPU_STK_SIZE)OS_CFG_IDLE_TASK_STK_SIZE;
����,���� OSCfg_IdleTaskStkBasePtr �� OSCfg_IdleTaskStkSize ͬʱ���� os.h ������,�����;���ȫ������,�����������ļ����汻ʹ�á�
/*
************************************************************************************************************************
************************************************************************************************************************
* �ⲿ����
************************************************************************************************************************
************************************************************************************************************************
*/
/* ���������ջ��ʼ��ַ */
extern CPU_STK * const OSCfg_IdleTaskStkBasePtr;
/* ���������ջ��С */
extern CPU_STK_SIZE const OSCfg_IdleTaskStkSize;
2���������������
����������������,����,����������ֻ�Ƕ�ȫ�ֱ��� OSIdleTaskCtr ++ ������
���������������� os_core.c �ļ��С�
/* �������� */
void OS_IdleTask (void *p_arg)
{
/* �Լ����Լ���ֵ��Ϊ�˷�ֹ���������� */
p_arg = p_arg;
/* ��������ʲô������,ֻ��ȫ�ֱ���OSIdleTaskCtr ++ ���� */
for(;;)
{
OSIdleTaskCtr++;
}
}
ȫ�ֱ��� OSIdleTaskCtr ��Ϊ������������������� os.h �ж��塣
OS_EXT OS_IDLE_CTR OSIdleTaskCtr;//���������������
���е� OS_IDLE_CTR ���� os_type.h �����¶�����������͡�
typedef CPU_INT32U OS_IDLE_CTR;
3���������������ƿ�

OS_EXT OS_TCB OSIdleTaskTCB;
��Ҫ�ر�ע�����:����� OS_TCB �ж���һ����Ա TaskDelayTicks,���������ں���� ʵ��������ʱ �лᱻ�ᵽ��
typedef struct os_tcb OS_TCB;
struct os_tcb
{
CPU_STK *StkPtr;
CPU_STK_SIZE StkSize;
/* ������ʱ���ڸ��� */
OS_TICK TaskDelayTicks;
};
OS_TICK����os_type.h���ض���ı�����
typedef CPU_INT32U OS_TICK;
4�����������ʼ�� �C ����������������
�ú����� os_core.c �ж��塣
/* ���������ʼ�� */
void OS_IdleTaskInit(OS_ERR *p_err)
{
/* ��ʼ��������������� ,����֪��,�����Ԥ����os.h �ж���õ�ȫ�ֱ�������ʼ��ʱ�����ֵΪ 0 */
OSIdleTaskCtr = (OS_IDLE_CTR)0;
/* ������������ -- ��ջ,TCB,��������ϵ��һ�� */
OSTaskCreate( (OS_TCB *)&OSIdleTaskTCB, // ����������ƿ�
(OS_TASK_PTR )OS_IdleTask, // ������������
(void *)0, // �β�����Ϊ0,�� NULL
(CPU_STK *)OSCfg_IdleTaskStkBasePtr, // ���������ջ�Ļ���ַ
(CPU_STK_SIZE)OSCfg_IdleTaskStkSize, // ���������ջ�Ĵ�С
(OS_ERR *)p_err ); // ����ķ�����
}
5���� OSInit �����е��ÿ��������ʼ������ OS_IdleTaskInit
��ǰ��,��ͨ����������������� main �����б����õġ������� OSInit �б����á���ô����Ŀ����������ϵͳ��û������֮ǰ����������Ѿ������á�
OSInit ����Ҳ�� os_core.c �ж��塣
/* RTOS��ʼ��
** ��ʼ��ȫ�ֱ���
*/
void OSInit (OS_ERR *p_err)
{
/* ����OS��ʼ״̬Ϊֹ̬ͣ */
OSRunning = OS_STATE_OS_STOPPED;
/* ��ʼ������ȫ��TCB,������TCB���������л� */
OSTCBCurPtr = (OS_TCB *)0;
OSTCBHighRdyPtr = (OS_TCB *)0;
/* ��ʼ�������б� */
OS_RdyListInit();
/* ��ʼ���������� */
OS_IdleTaskInit(p_err);
if (*p_err != OS_ERR_NONE)
{
return;
}
}
6��ʵ��������ʱ
������ʱ��������ָ������ø���ʱ������,����ᱻ���� CPU ʹ��Ȩ,Ȼ���������״̬,ֱ����ʱ����,�������»�ȡ CPU ʹ��Ȩ�ſ��Լ������С����������������ʱ��,CPU ����ȥִ������������,�������������Ҳ����ʱ״̬,��ô CPU �ͽ����п�������
������ʱ������ os_time.c �ж��岢ʵ�֡�
/* ������ʱ */
void OSTimeDly(OS_TICK dly)
{
/* ������ʱʱ�� */
OSTCBCurPtr->TaskDelayTicks = dly;
/* ����������� */
OSSched();
}
TaskDelayTicks ��������ƿ��һ����Ա,���ڼ�¼������Ҫ��ʱ��ʱ��,��λΪ SysTick ���ж����ڡ����統SysTick ���ж�����Ϊ 10 ms,���� OSTimeDly(2) ����� 2*10ms ����ʱ��
���� OSSched() ��Ҫ����ʵ��,�� os_core.c �С�
/* �����л�,ʵ�ʾ��Ǵ���PendSV�쳣,Ȼ����PendSV�쳣�н����������л� */
void OSSched(void)
{
/* �����ǰ�����ǿ�������,��ô��ȥ����ִ������1��������2,�������ǵ���ʱʱ���Ƿ����
����������ʱʱ���û�е���,�Ǿͷ��ؼ���ִ�п������� */
if( OSTCBCurPtr == &OSIdleTaskTCB )
{
if(OSRdyList[0].HeadPtr->TaskDelayTicks == 0)
{
OSTCBHighRdyPtr = OSRdyList[0].HeadPtr;
}
else if(OSRdyList[1].HeadPtr->TaskDelayTicks == 0)
{
OSTCBHighRdyPtr = OSRdyList[1].HeadPtr;
}
else
{
return; /* ������ʱ��û�е�����,����ִ�п������� */
}
}
else
{
/*�����task1����task2�Ļ�,���������һ������,����������������ʱ��,���л���������
����,�ж��µ�ǰ�����Ƿ�Ӧ�ý�����ʱ״̬,����ǵĻ�,���л�������������Ͳ������κ��л� */
if(OSTCBCurPtr == OSRdyList[0].HeadPtr)
{
if(OSRdyList[1].HeadPtr->TaskDelayTicks == 0)
{
OSTCBHighRdyPtr = OSRdyList[1].HeadPtr;
}
else if(OSTCBCurPtr->TaskDelayTicks != 0)
{
OSTCBHighRdyPtr = &OSIdleTaskTCB;
}
else
{
return; /* ����,�������л�,��Ϊ����һ������ʱ�ȴ�״̬ */
}
}
else if(OSTCBCurPtr == OSRdyList[1].HeadPtr)
{
if(OSRdyList[0].HeadPtr->TaskDelayTicks == 0)
{
OSTCBHighRdyPtr = OSRdyList[0].HeadPtr;
}
else if(OSTCBCurPtr->TaskDelayTicks != 0)
{
OSTCBHighRdyPtr = &OSIdleTaskTCB;
}
else
{
return; /* ����,�������л�,��Ϊ�����������ʱ�ȴ�״̬ */
}
}
}
/* �����л� */
OS_TASK_SW();
}
��Ҫ����ʱͨ����ǰ���ƿ��ָ�� OSTCBCurPtr (ָ��ǰ�������е�һ������)��������ȼ����ƿ��ָ�� OSTCBHighRdyPtr (ָ����һ��Ҫ���е�����)�����п��ƺ��жϵġ�
��ͼ���������������롣

7����д main ����
int main(void)
{
OS_ERR err;
/* �ر��ж� */
CPU_IntDis();
/* ����SysTick 10ms �ж�һ�� */
OS_CPU_SysTickInit (10);
/* ��ʼ����ص�ȫ�ֱ��� */
OSInit(&err);
/* �������� */
OSTaskCreate ((OS_TCB*) &Task1TCB,
(OS_TASK_PTR ) Task1,
(void *) 0,
(CPU_STK*) &Task1Stk[0],
(CPU_STK_SIZE) TASK1_STK_SIZE,
(OS_ERR *) &err);
OSTaskCreate ((OS_TCB*) &Task2TCB,
(OS_TASK_PTR ) Task2,
(void *) 0,
(CPU_STK*) &Task2Stk[0],
(CPU_STK_SIZE) TASK2_STK_SIZE,
(OS_ERR *) &err);
/* ��������뵽�����б� */
OSRdyList[0].HeadPtr = &Task1TCB;
OSRdyList[1].HeadPtr = &Task2TCB;
/* ����OS,�����ٷ��� */
OSStart(&err);
}
��Ҫע��:���������ʼ��������OSInint �е���,��ϵͳ����֮ǰ�����ÿ�������
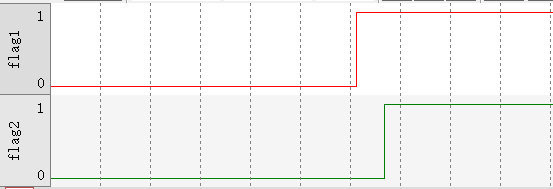
8���� ����һ �� ����� ����
/* ����1 */
void Task1( void *p_arg )
{
for( ;; )
{
flag1 = 1;
OSTimeDly(2);
flag1 = 0;
OSTimeDly(2);
}
}
/* ����2 */
void Task2( void *p_arg )
{
for( ;; )
{
flag2 = 1;
OSTimeDly(2);
flag2 = 0;
OSTimeDly(2);
}
}
9����һ����Ϊ�ؼ���������ʵ���� ʱ�� SysTick
�� SysTick �жϷ�������
/* SysTick �жϷ����� */
void SysTick_Handler(void)
{
OSTimeTick();
}
�� OSTimeTick();
void OSTimeTick (void)
{
unsigned int i;
/* ɨ������б������������TaskDelayTicks,�����Ϊ0,���1 */
for(i=0; i<OS_CFG_PRIO_MAX; i++)
{
if(OSRdyList[i].HeadPtr->TaskDelayTicks > 0)
{
OSRdyList[i].HeadPtr->TaskDelayTicks --;
}
}
/* ������� */
OSSched();
}
��Ҫע�������������Ƿdz��б�Ҫ��,����������������,ִ���� for ѭ��֮��ͽ�����,ֱ��������һ�ε�SysTick�ж�,����ִ�� for ѭ��,�Դ�����,���Ǿ��Dz��л��ص���������˵���������Ⱥ��� OSSched() �Ƿdz���Ҫ�ġ�
�ܽ�
Ϊ�˷����´ο�����Ѹ�ٷ�Ӧ����,�Ұ��Լ�����ij���������������ϸ�������¡�
1���������Ǵ�main������ʼִ��,��main������������ SysTick �Լ���ʼ���� OSInit(&err);�Ժ�,����OS,�����ٷ��ء�(ע��:�� SysTick ��ʼ�����֮��,��ʱ�Ϳ�ʼ��,ֻ�����ڳ���һ��ʼ��ʱ�� SysTick �жϱ��ر���,�� ϵͳ���� OSStart() ��������� OSStartHighRdy() �вű����¿�����)
2����������ִ������һ,��ִ���� flag1 = 1;��ʼִ�� OSTimeDly(2); ���������������������һ����ʱʱ���Լ�Ϊ��ʵ��������ʱ���������л����������,Ȼ���������ʼִ��,����һʧȥ CPU ,ͬ����, �������ִ���� flag2 = 1;��ʼִ�� OSTimeDly(2); ��������������������������ʱʱ���Լ�Ϊ��ʵ��������ʱ���������л����˿�������(��Ϊ����һ��Ȼ����������״̬),���ŵ�һ�� SysTick �жϲ���(10msʱ�䵽),ϵͳִ���жϷ������ OSTimeTick,��ÿ������� TaskDelayTicks ��ȥ 1 ,֮��,ͨ��������Ⱥ��� OSSched() ���л�����������(��Ϊ��ʱ����һ���������Ȼ��������״̬)�����ڶ��� SysTick �жϲ���(��һ��10msʱ�䵽),ϵͳ�ٴ�ִ���жϷ������ OSTimeTick,��ÿ������� TaskDelayTicks �ټ�ȥ 1 ,֮��ͨ�������л�����,����һ��TaskDelayTicks����0(��ʵ������� TaskDelayTicks Ҳ���� 0 ��,�����ڳ����е� if ������������ȴ�������һ��,ͨ���ߵ�˳��,��������֤��,���������ͼ��)֮��,����һ�ٴ�����ִ��,ִ�е� flag1 = 0 ��,��ʼִ�� OSTimeDly(2); �ٴν�����ʱ����״̬,���л�������� ��
����,��������������ˡ�
������֤����
if( OSTCBCurPtr == &OSIdleTaskTCB )
{
if(OSRdyList[0].HeadPtr->TaskDelayTicks == 0)
{
OSTCBHighRdyPtr = OSRdyList[0].HeadPtr;
}
else if(OSRdyList[1].HeadPtr->TaskDelayTicks == 0)
{
OSTCBHighRdyPtr = OSRdyList[1].HeadPtr;
}
else
{
return; /* ������ʱ��û�е�����,����ִ�п������� */
}
}
����˳��
if( OSTCBCurPtr == &OSIdleTaskTCB )
{
if(OSRdyList[1].HeadPtr->TaskDelayTicks == 0)
{
OSTCBHighRdyPtr = OSRdyList[1].HeadPtr;
}
else if(OSRdyList[0].HeadPtr->TaskDelayTicks == 0)
{
OSTCBHighRdyPtr = OSRdyList[0].HeadPtr;
}
else
{
return; /* ������ʱ��û�е�����,����ִ�п������� */
}
}

��Ҫע�����,
1���Ӻ��������,����һ�������������ͬʱ���е�,����ʵ��������仹�����Ⱥ�֮�ֵġ�
2����ʵ��ʹ�� ��C/OS ʱ,���Dz���������ʹ����ʱ���������ǻ����һ�� ��ʱ�б� ������ά����