�����ѧϰSTM32F4ϵ�е�RTCʱ��ϵͳ,ͬʱҲ��ѧϰ4λ7���������ʾ�������������Ϻܶ�3641BS����ܶ��Ǽ�����74HC595��λ�Ĵ���оƬ��PCB��,�����ϴ�����STM32�������ͺ�����ܵ��������ǻ���������(VCC, DIO, RCLK, SCLK, GND)��Ƶġ�������ͷֻ����ԭʼ��12���Ű汾,�������ƪ�������һὲ����ԭʼ�汾��,Ҳ������һ������¼�Ͷ�RTCʱ�ӻ����ж������Լ�3641BS����ԭ������ʶ�ɡ�
1. ʵ��ԭ��
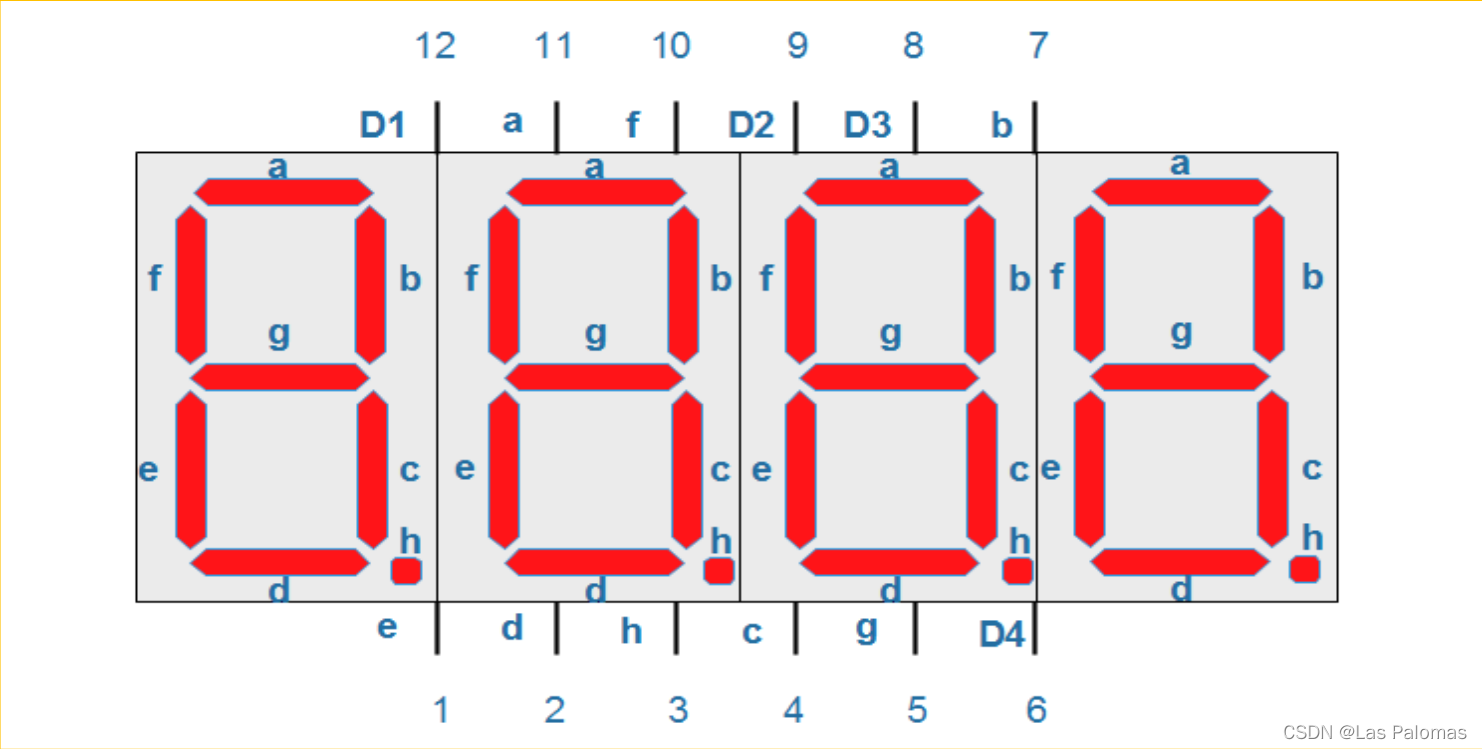
����ͼ,��λ�߶��������12�����š�������ʾ"abcdefg"��7�κ���ʾС�����"h"֮��,����4������D1��D2��D3��D4����"λ"���š����ĸ�����ܵ�"λ"����Ϊ�ߵ�ƽʱ,��Ӧ������ܱ�������
�ĸ�����ܵ���ʾԭ��������ɨ��D1��D2��D3��D4,Ȼ����Ӧ�İ˶ι������������ڵ����ٶȺܿ�,С�����۷ֱ��ʱ���ֵ����,���Կ����������ĸ������ͬʱ��ʾ��
����STM32ʵʱʱ��(RTC)��˵,����һ��������BCD��ʱ��/������,�ṩ����ʱ�ӡ������ɱ�̱����жϺ�һ�������жϹ��ܵĿɱ�̶��ڻ��ѱ�־,������һ���Զ����ѵ�Ԫ����������ģʽ��
����32λ�ļĴ����������롢�֡�Сʱ(12��24Сʱ��ʽ)�����ڡ����ڡ��·ݺ���ݵĶ�����ʮ����(BCD)��ʽ������,����ֵ�Զ����Ƹ�ʽ�ṩ��
ϵͳ�����Զ���ÿ�µ�����ƫ�Ƶ�28��29(����)��30��31�졣�����ṩ����ʱ����������32λ�Ĵ��������ɱ�̵ı������롢�롢���ӡ�Сʱ�����ں����ڡ�����,���徫�ȵ�ƫ�����ͨ������У���ܽ��в��������ϵ縴λ��,���е�RTC�Ĵ������ܵ�����,��ֹ���ܵ��쳣д�롣�����豸״̬���(����ģʽ������ģʽ������),ֻҪ��Դ��ѹ�����ڹ�����Χ��,RTC�Ͳ���ֹͣ������
?
2.ʵ�����
STM32F407ZG������һ��
����弰����������(����ĸ)
��λ�����������3641BS(��ԭʼ�汾,�������κμ���оƬ)
4��220����������
3.ʵ���·����ͼ
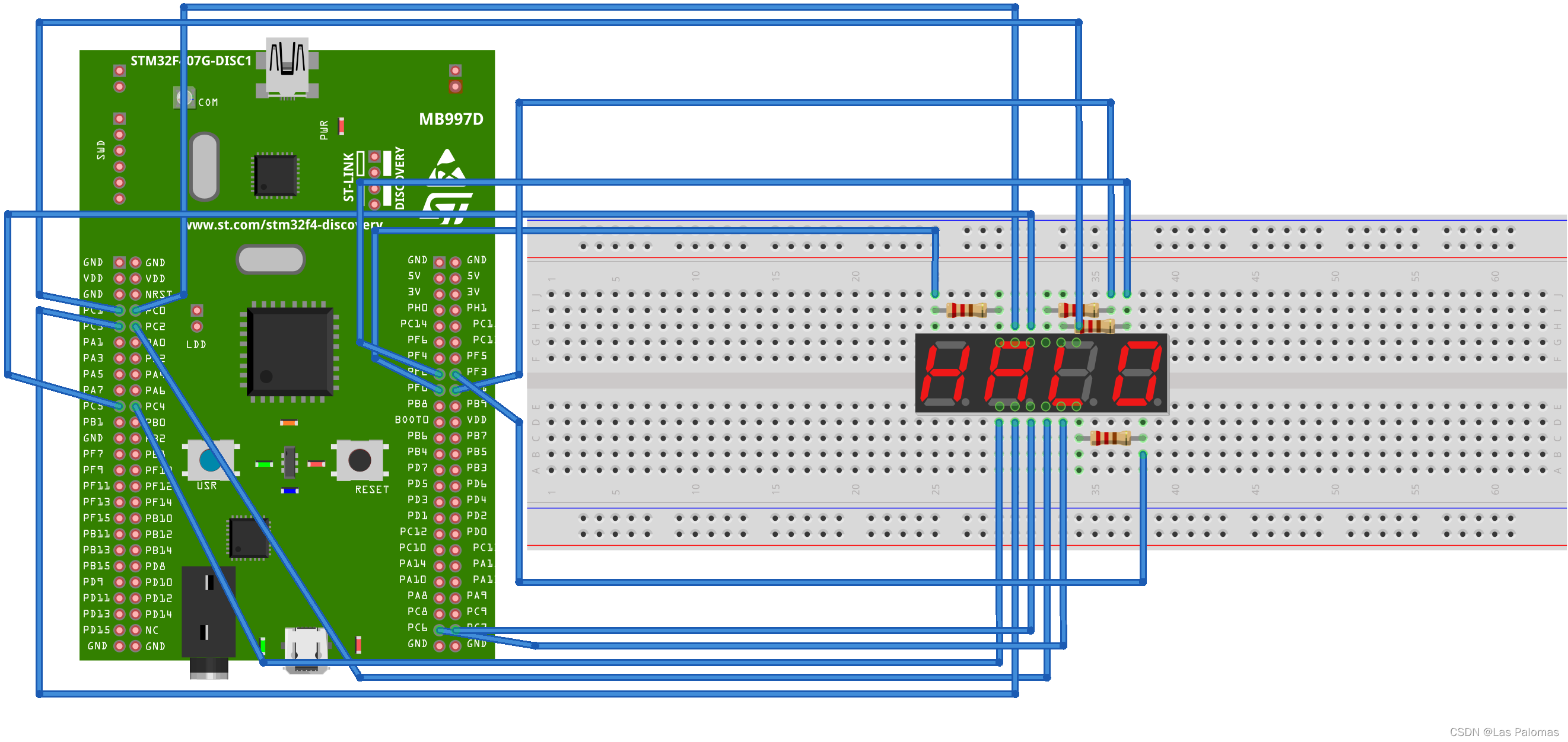
?
����ܵ�a~h���ŷֱ�ӵ���Ƭ����PC0~PC7����,d0,d1,d2,d3���ŷֱ�ӵ���Ƭ����PF0~PF3����,�������м䴮��220������������,���������������LED��
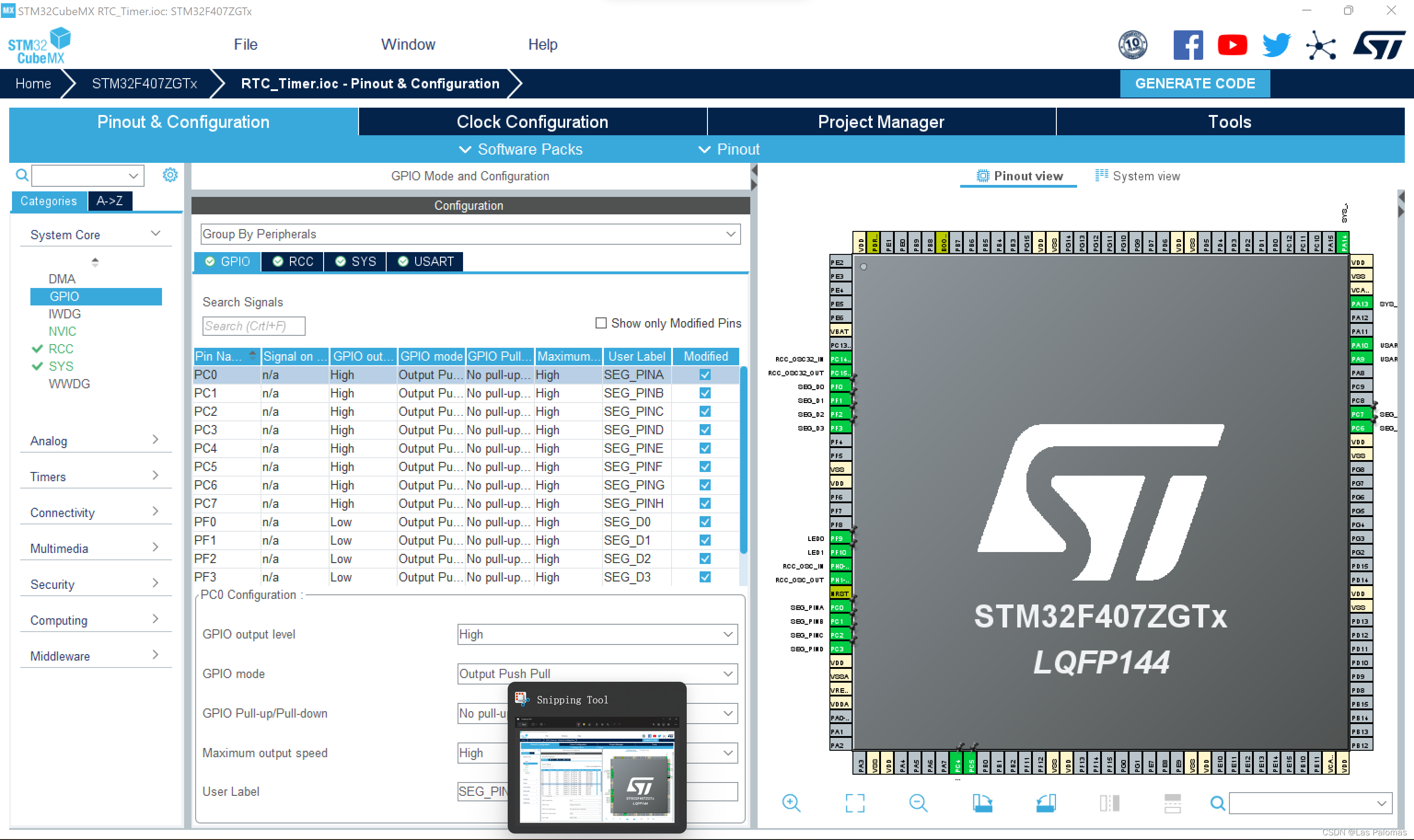
4. CUBEMX�����Լ������д
���Ƚ�A~H�˶˳�ʼ��Ϊ�ߵ�ƽ,D0~D3��ʼ��Ϊ�͵�ƽ,ÿ������������ģʽΪ����
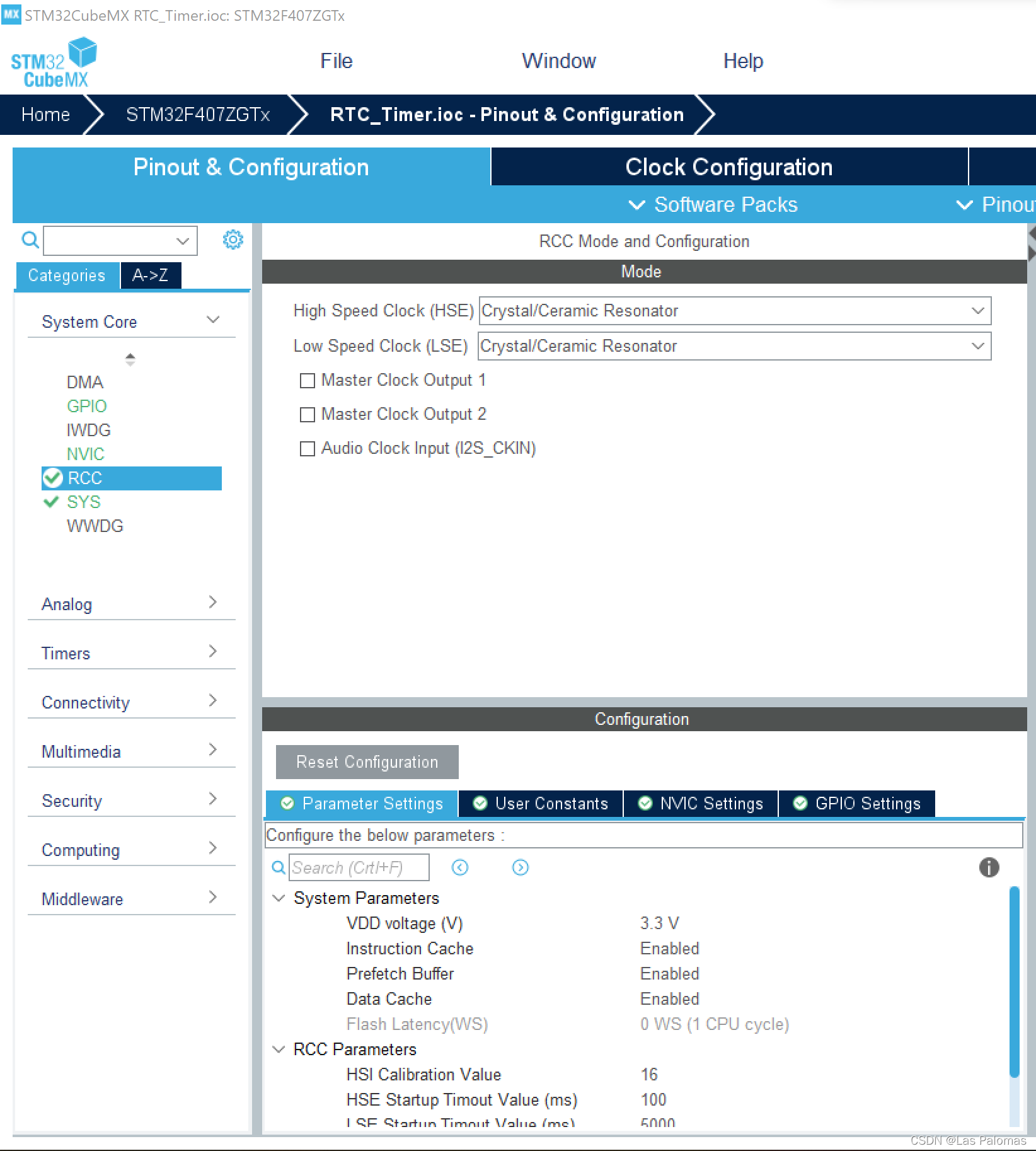
?RCCϵͳʱ��Դ��HSE, LSE����Ϊ����Դ
?
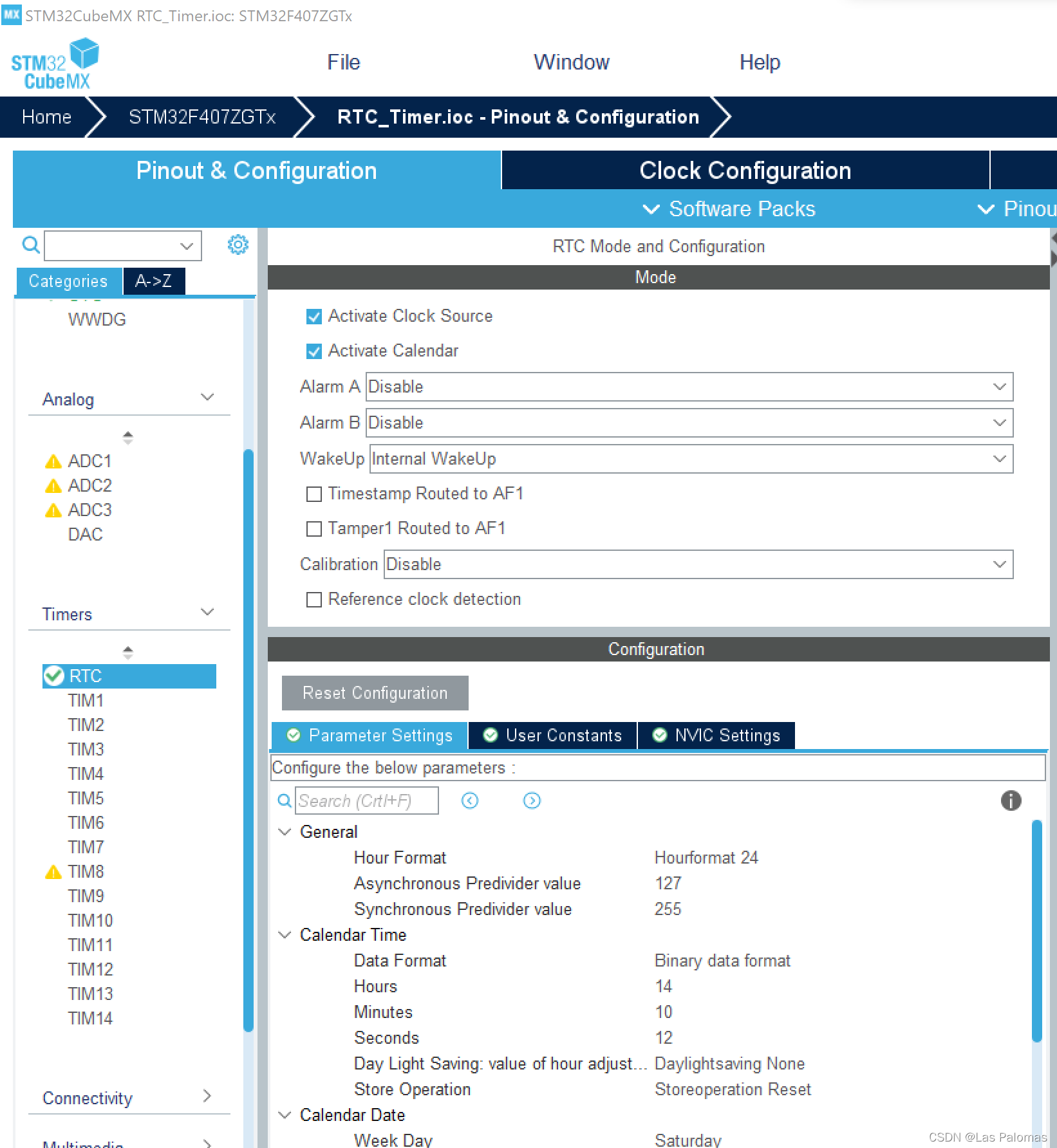
��RTCʱ��Դ������,�����ڲ�ʱ�ӻ���,��ʱ���Ϊ24Сʱ��,�洢ģʽ�ö�����(������Ҫ!!!�Ȼ��ȡʱ���ʱ��ҲҪ�Զ�������ʽ��ȡ,�������ֻ���ƫ��),���ú�ʱ�����Լ������ա����ڼ�,�����Լ���Ҫ�Ƿ�ر�����ʱ,���Ѷ�ʱ����ʱ����������Ϊ1Hz(��RTC_WAKEUPCLOCK_RTCCLK / 16),��������Ĭ�Ͼͺ�
 ?
?
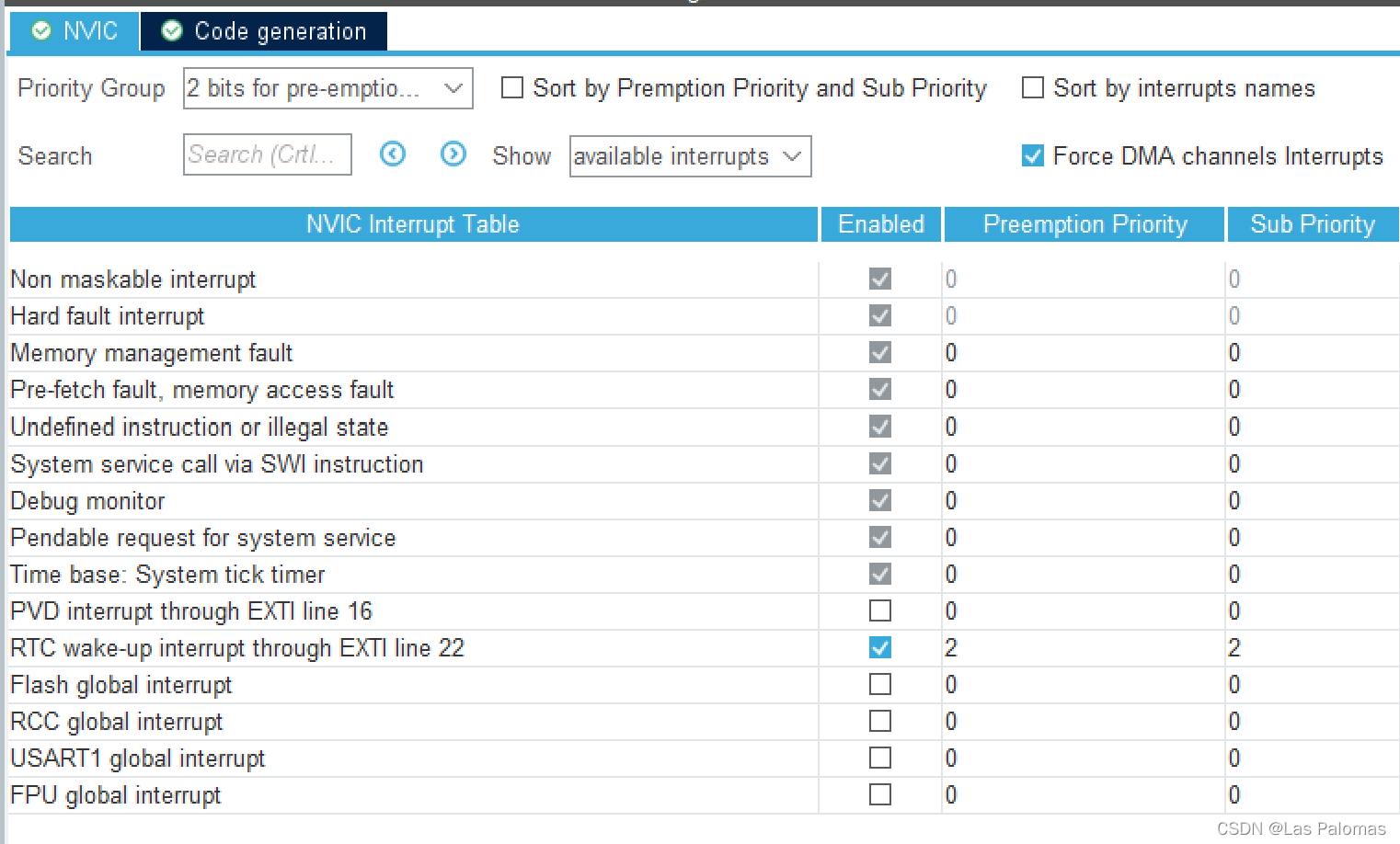
?���������û����ж��Լ����ȼ���������,�ҽ��ж����ȼ���������Ϊ2λ��ռ���ȼ���2λ��Ӧ���ȼ�,ͬʱ�������жϼ������ռ����Ӧ���ȼ�������Ϊ2,�Ա�֤�����������ϵͳ�ײ��жϵ����С����ѡ�����ж�������������HAL���ô���������
 ?
?
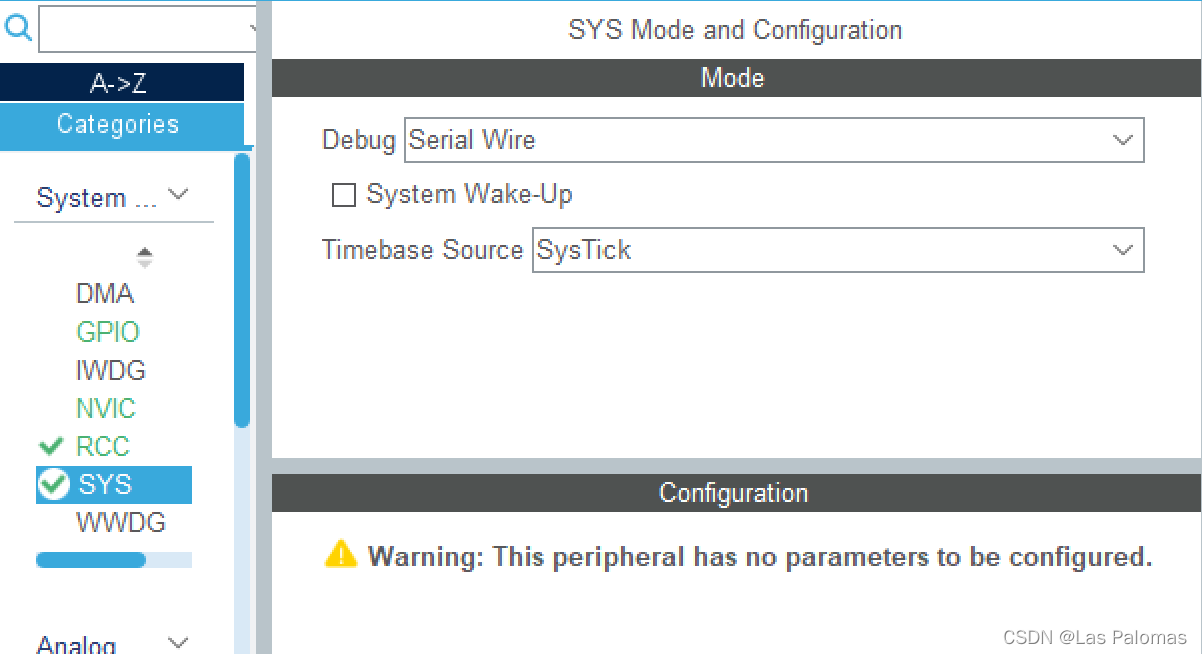
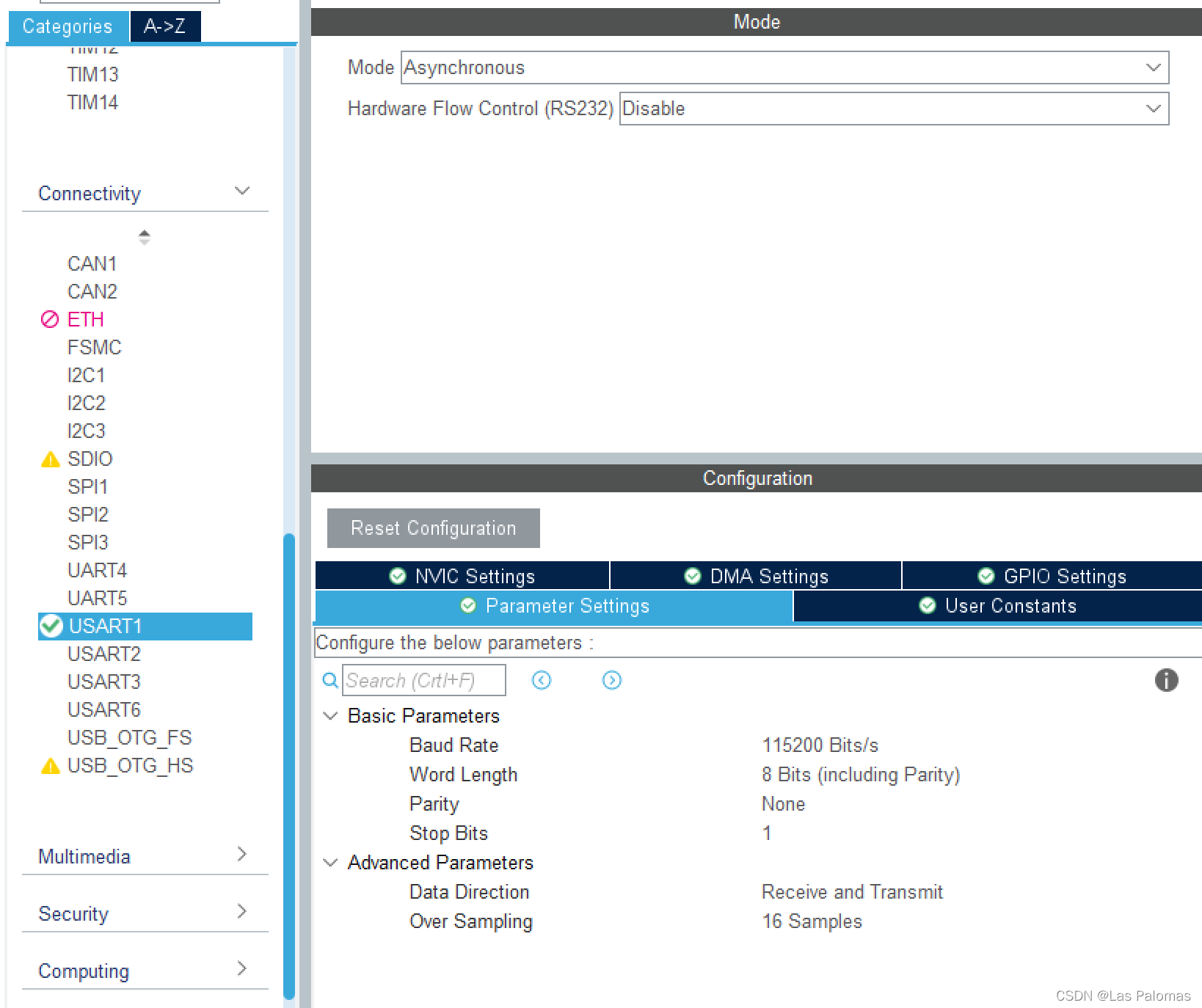
Ϊ�����жϴ���������ͨ��printf������ں���������ϸ����Ϣ,��Ҫ���ô��ڡ���SYS�н�Debugģʽ��ΪSerial Wire,��������USART1,����Ϊ�첽����ģʽ,������115200,����Ĭ�Ͼͺá�
ȷ����������ɻ���HAL���KEIL5 MDK�����ļ�
����������ʵ�ֹؼ����벿�ֵ�ʱ����!?
����,Ϊ�˱�֤RTC�ϵ��ʱ�䲻��ʧ��ͬʱÿ���ϵ��ʱ�����ڲ����ظ�����,��Ҫ��RTC �Ĵ��������±��ֵ,�Ա���Ƿ�Ϊ��һ������ʱ�䡣���Ĵ�����Ҫ����дȨ��,������main()����HAL_Init()��ʼ����ɺ����:
HAL_PWR_EnableBkUpAccess();Ȼ����rtc.c�ļ��е�MX_RTC_Init()������ʼ��ʱ�䲿��ǰ������жϺĴ����Ƿ��б�ǵ���,��û�б�����ʼ����д�Ĵ�����
/* USER CODE BEGIN Check_RTC_BKUP */
if(HAL_RTCEx_BKUPRead(&hrtc, RTC_BKP_DR0) != 0x5050) { // Add this line
/* USER CODE END Check_RTC_BKUP */
sTime.Hours = 14;
sTime.Minutes = 10;
sTime.Seconds = 12;
// ....
/* USER CODE BEGIN RTC_Init 2 */
HAL_RTCEx_BKUPWrite(&hrtc, RTC_BKP_DR0, 0x5050); // Add this line
} // Add this line
/* USER CODE END RTC_Init 2 */
/** Enable the WakeUp
*/
if (HAL_RTCEx_SetWakeUpTimer_IT(&hrtc, 0, RTC_WAKEUPCLOCK_CK_SPRE_16BITS) != HAL_OK)
{
Error_Handler();
}�����жϻص���������
int finale = 0;
void HAL_RTCEx_WakeUpTimerEventCallback(RTC_HandleTypeDef *hrtc) {
char buf[40];
RTC_TimeTypeDef RTC_TimeStruct;
RTC_DateTypeDef RTC_DateStruct;
HAL_RTC_GetTime(hrtc,&RTC_TimeStruct,RTC_FORMAT_BIN);
sprintf((char*)buf,"Time: %02d:%02d:%02d",RTC_TimeStruct.Hours,RTC_TimeStruct.Minutes,RTC_TimeStruct.Seconds);
printf("%s\r\n",buf);
HAL_RTC_GetDate(hrtc,&RTC_DateStruct,RTC_FORMAT_BIN);
sprintf((char*)buf,"Date: 20%02d-%02d-%02d Day %d",RTC_DateStruct.Year,RTC_DateStruct.Month,RTC_DateStruct.Date,RTC_DateStruct.WeekDay);
printf("%s\r\n",buf);
finale = RTC_TimeStruct.Hours * 100 + RTC_TimeStruct.Minutes;
}������ͷ�ļ���������ʾСʱ�ͷ��ӵ��ⲿintֵ,��������whileѭ����ɨ����ʾ���������
extern int finale;�����usart.c��usart.h������fputc���غ���,�Ա�֤��printf��������豸�ӿ���̨�ض�����1
#include <stdio.h>
#ifdef __GNUC__
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endifPUTCHAR_PROTOTYPE
{
HAL_UART_Transmit(&huart1,(uint8_t*)&ch, 1, 0xFFFF);
return ch;
}������ͬѧ������������:Ϊʲô�Ҽ���printf�����Ժ�ij��������д������,��ϵͳ��������,�������������?������Ϊ��Ƕ��ʽ�ı����HAL�Ⲣû�ж�IO�����ĵײ�ʵ��(����_sys_exit(), _sys_open(), _sys_close()��Щ����),ʹ���豸����ʱ����������ж�BAEB��,�������˰�����ģʽ,��ʱ����Ҫ__use_no_semihosting_swi�������,ͬʱ�ÿտ�ʵ����Щ����(dummy����),ʹ����������Щ�ļ���������ʱ��ͣ�ڴ��жϴ��������´���ճ�����½���Դ�ļ������빤�̼���:
/* USER CODE BEGIN 0 */
#include <time.h>
#pragma import(__use_no_semihosting_swi)
#pragma import(_main_redirection)
const char __stdin_name[150];
const char __stdout_name[150];
const char __stderr_name[150];
typedef int FILEHANDLE;
void _sys_exit(int status)
{
while(1);
}
FILEHANDLE _sys_open(const char *name, int openmode)
{
return 0;
}
int _sys_close(FILEHANDLE fh)
{
return 0;
}
int _sys_write(FILEHANDLE fh, const unsigned char *buf, unsigned len, int mode)
{
return 0;
}
int _sys_read(FILEHANDLE fh, unsigned char*buf, unsigned len, int mode)
{
return 0;
}
int _sys_istty(FILEHANDLE fh)
{
return 0;
}
int _sys_seek(FILEHANDLE fh, long pos)
{
return 0;
}
int _sys_ensure(FILEHANDLE fh)
{
return 0;
}
long _sys_flen(FILEHANDLE fh)
{
return 0;
}
int _sys_tmpnam(char *name, int fileno, unsigned maxlength)
{
return 0;
}
void _ttywrch(int ch)
{
}
time_t time(time_t *t)
{
return 0;
}
int remove(const char *filename)
{
return 0;
}
char *_sys_command_string(char *cmd, int len)
{
return 0;
}
clock_t clock(void)
{
return 0;
}
/* USER CODE END 0 */
������������֮��,����ʵ����λ�߶�����ܵ����������ˡ����ȴ������Ͷ�Ӧ����������
int dat[10][8] = {
// Last bit is reserved for H (i.e. point)
{0, 0, 0, 0, 0, 0, 1, 1}, //0
{1, 0, 0, 1, 1, 1, 1, 1}, //1
{0, 0, 1, 0, 0, 1, 0, 1}, //2
{0, 0, 0, 0, 1, 1, 0, 1}, //3
{1, 0, 0, 1, 1, 0, 0, 1}, //4
{0, 1, 0, 0, 1, 0, 0, 1}, //5
{0, 1, 0, 0, 0, 0, 0, 1}, //6
{0, 0, 0, 1, 1, 1, 1, 1}, //7
{0, 0, 0, 0, 0, 0, 0, 1}, //8
{0, 0, 0, 0, 1, 0, 0, 1} //9
};
uint16_t dbit[4] = {GPIO_PIN_0, GPIO_PIN_1, GPIO_PIN_2, GPIO_PIN_3}; //ʹ��λ����(D0~D3), �ߵ�ƽ��Ч
uint16_t tbit[8] = {GPIO_PIN_0, GPIO_PIN_1, GPIO_PIN_2, GPIO_PIN_3, GPIO_PIN_4, GPIO_PIN_5, GPIO_PIN_6, GPIO_PIN_7}; //���Ƶ����ĸ������(a~h), �͵�ƽ��Ч
Ȼ������ʾ��������
void DisplayInt(int n, int nb, int punto) {
int i = 0;
if(n < 10) {
for(i = 0; i < 8; i++) {
HAL_GPIO_WritePin(GPIOC, tbit[i],
(nb == 1 && i == 7) ? (punto ? 0 : 1) : dat[n][i]);
}
}
}����������λ����ͬʱ��ʾ,punto�βα�ʾ�Ƿ���ʾСʱ�ͷ���֮���С����
void delay_us(uint32_t nus) {
uint32_t ticks;
uint32_t told,tnow,tcnt=0;
uint32_t reload=SysTick->LOAD;
uint32_t freq = HAL_RCC_GetSysClockFreq();
ticks=nus * freq / 1e6;
told=SysTick->VAL;
while(1) {
tnow=SysTick->VAL;
if(tnow!=told) {
if(tnow<told)tcnt+=told-tnow;
else tcnt+=reload-tnow+told;
told=tnow;
if(tcnt>=ticks) break;
}
}
}
void DisplayNumber(int x, int punto) {
int nb = 0;
int display_arr[5] = {0};
int bit_base = 1000;
for(nb = 0; nb < 4; nb++) {
if(x / bit_base != 0) {
display_arr[nb] = x/bit_base;
x = x%bit_base;
} else {
display_arr[nb] = 0;
}
bit_base = bit_base / 10;
}
for(nb = 0; nb < 4; nb++) {
DisplayInt(display_arr[nb], nb, punto);
HAL_GPIO_WritePin(GPIOF, dbit[nb], GPIO_PIN_SET); // 4λ����������ʾ200us��Ϩ��,�γ�ѭ��,С�����۷ֱ�ʱ��,����ȥ����������
delay_us(200);
HAL_GPIO_WritePin(GPIOF, dbit[nb], GPIO_PIN_RESET);
}
}�������ʾСʱ�ͷ��е��ܺ���,Ҫ����һֱ��ʾ����Ϩ��,���뽫DisplayNumber()����ú����Ķ�ʱѭ��֮��,��λ�Ǻ���,�����Ǵ���:
void DisHHMM(int x, uint32_t ms, int punto) {
uint32_t tickstart = HAL_GetTick();
uint32_t wait = ms;
/* Add a freq to guarantee minimum wait */
if (wait < HAL_MAX_DELAY)
{
wait += (uint32_t)(uwTickFreq);
}
while((HAL_GetTick() - tickstart) < wait)
{
DisplayNumber(x, punto);
}
}
����,�������������Ѿ�ȫ��ʵ�����,������main()�����в����ˡ�
int main(void)
{
// ...
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_RTC_Init();
// ...
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
if(finale != 0) {
DisHHMM(finale, 500, 1);
DisHHMM(finale, 500, 0);
}
}
/* USER CODE END 3 */
}5. ʵ����
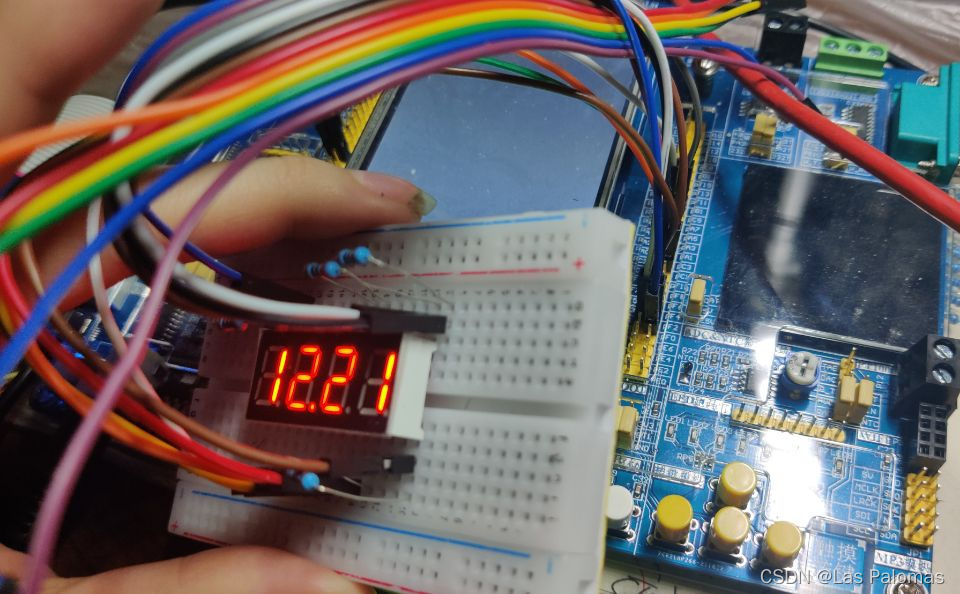
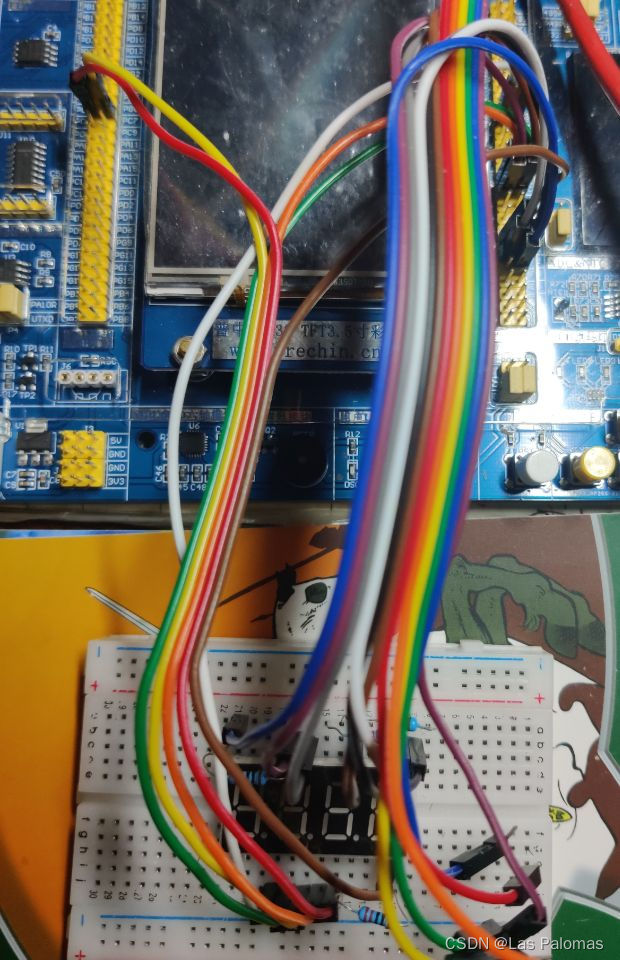
 ?
?
6. �����?
1.?stm32������ģʽ - chenguan - ����
2.?How to drive a 7 segment display directly on Raspberry Pi in Python �C RasPi.TV