STM32驱动MPU6050
STM32通过串口给MPU6050与MU6050通信,以下程序将MPU6050接到了串口2上,PA2为TX,PA3为RX,具体的代码如下:
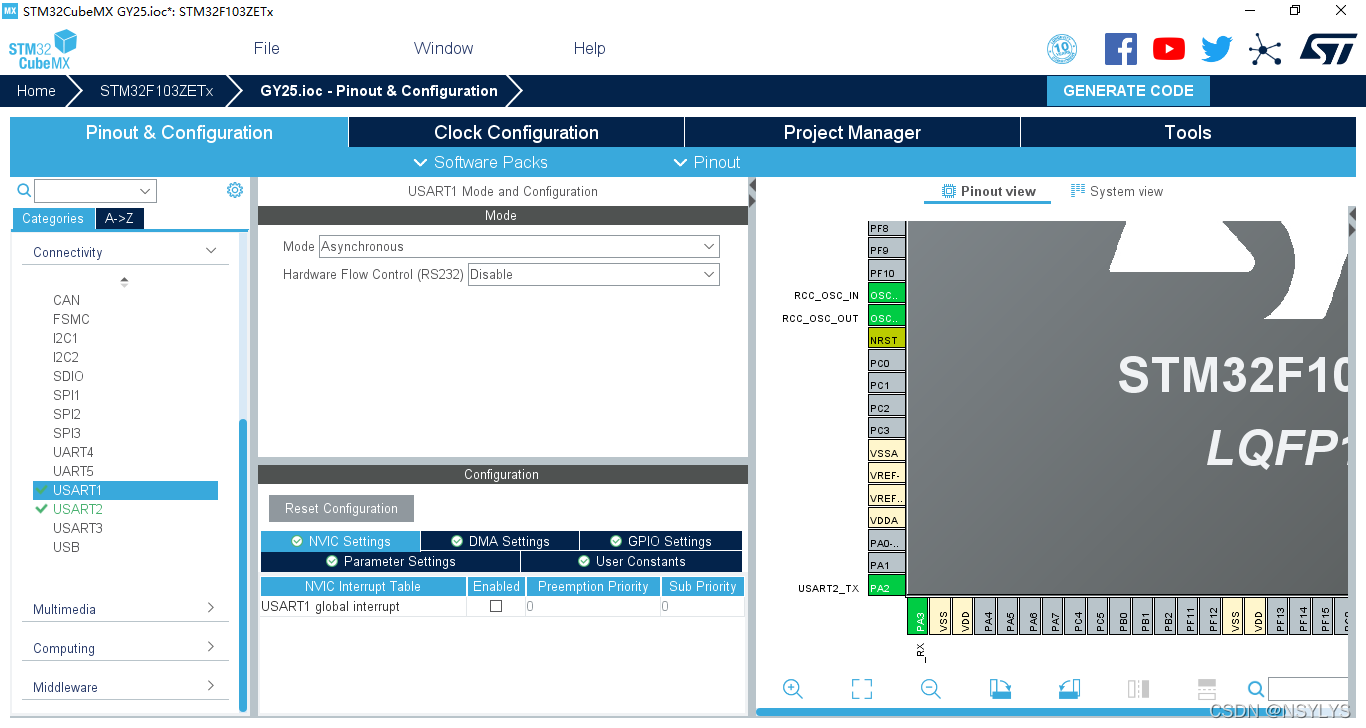
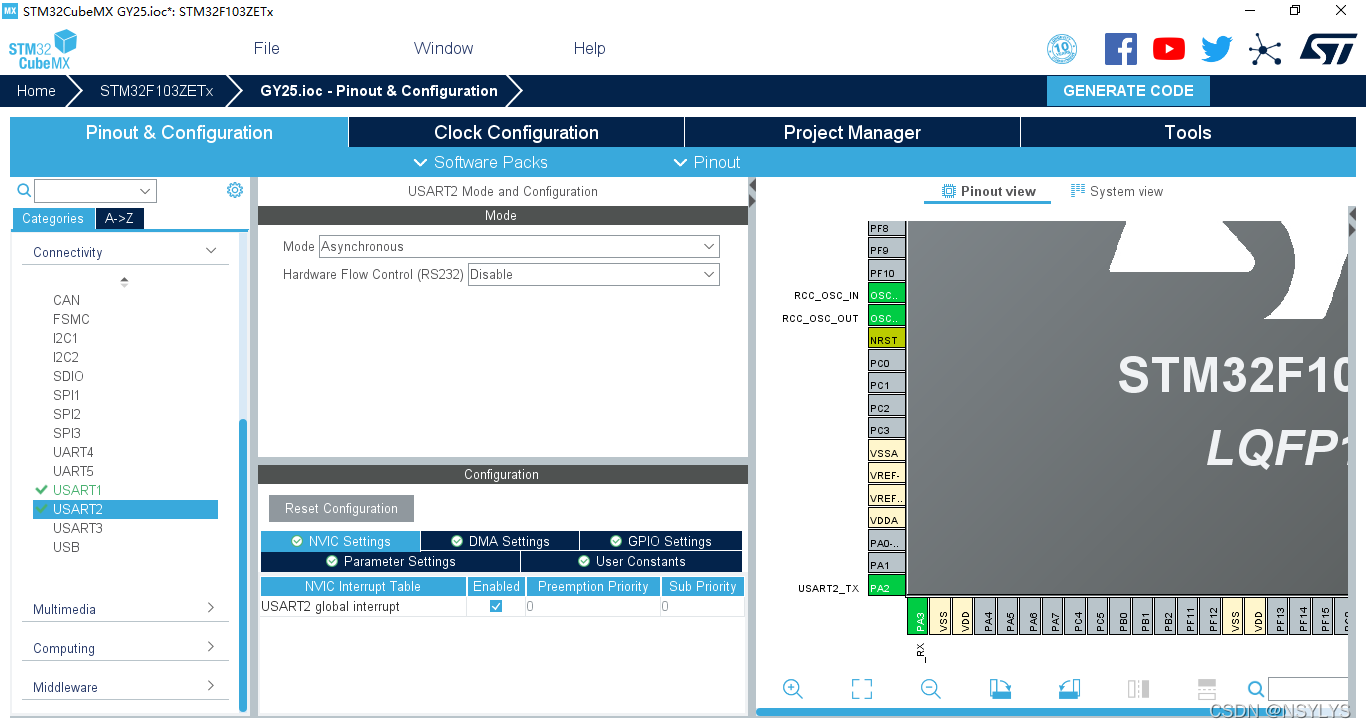
CubeMx配置
CubeMx配置的配置很简单,只需要把串口1以及串口2都使能,其中串口1用于与上位机(电脑)通信,以发送MPU6050的测量值,串口2则用于与MPU6050通信,之后开启串口2的中断,串口1的不用开,因为串口1只需要向上位机发送数据,所以不用中断,串口2因为要接收数据,所以要使能
工程文件准备
把正点原子的system文件夹粘贴到工程下,因为接下来要用到delay.c中的函数,复制完后,向工程中添加.c以及.h文件,并在主函数中包含头文件
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "delay.h"
/* USER CODE END Includes */
定义在程序中要用到的变量
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
static unsigned char flag=0;
static uint8_t rebuf=0;
unsigned char chr;
int16_t YAW=0,PITCH=0,ROLL=0;
/* USER CODE END 0 */
主函数的编写
在对应位置粘贴如下代码:
/* USER CODE BEGIN 2 */
delay_init(72); //延时初始化
HAL_UART_Receive_IT(&huart2, (uint8_t *)&rebuf, 1); //初始化串口2的接收中断
/* USER CODE END 2 */
第二处:
/* USER CODE BEGIN 3 */
if(flag==0)
{
chr = 0xa5;
HAL_UART_Transmit(&huart2,(uint8_t *)&chr, 1, 0xffff);//MPU6050的串口接到了串口2上
chr = 0x51;
HAL_UART_Transmit(&huart2,(uint8_t *)&chr, 1, 0xffff);//发送查询指令
}
delay_ms(10);
if(flag==1) //flag置一的操作会在串口接收中断中完成
{
flag=0; //flag置零为下一次读取数据左准备
printf("YAW = %hd\r\n", YAW); //发送对应的角度信息
printf("PITCH = %hd\r\n", PITCH);
printf("ROLL = %hd\r\n", ROLL);
}
}
/* USER CODE END 3 */
串口接收中断函数的编写
/* USER CODE BEGIN 4 */
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance==USART2) //判断中断是否来自于串口2
{
static unsigned char buf[8] = {0}, k = 0;
buf[k++] = rebuf;
if(!(buf[0]==0xaa))//如果帧头错误,清缓存
{
k=0;
buf[0]=0;
}
if(k==8)//数据接收完毕
{
if(buf[7]==0x55)//判断帧尾,正确则解析姿态角
{
YAW=(buf[1]<<8|buf[2]);//YAW,PITCH,ROLL为真实值的100倍
PITCH=(buf[3]<<8|buf[4]);
ROLL=(buf[5]<<8|buf[6]);
flag=1;
}
k=0;//清缓存
}
}
HAL_UART_Receive_IT(&huart2, (uint8_t *)&rebuf, 1); //再开启一遍中断,千万不要忘了,否则无法再次进入接收中断
}
/* USER CODE END 4 */
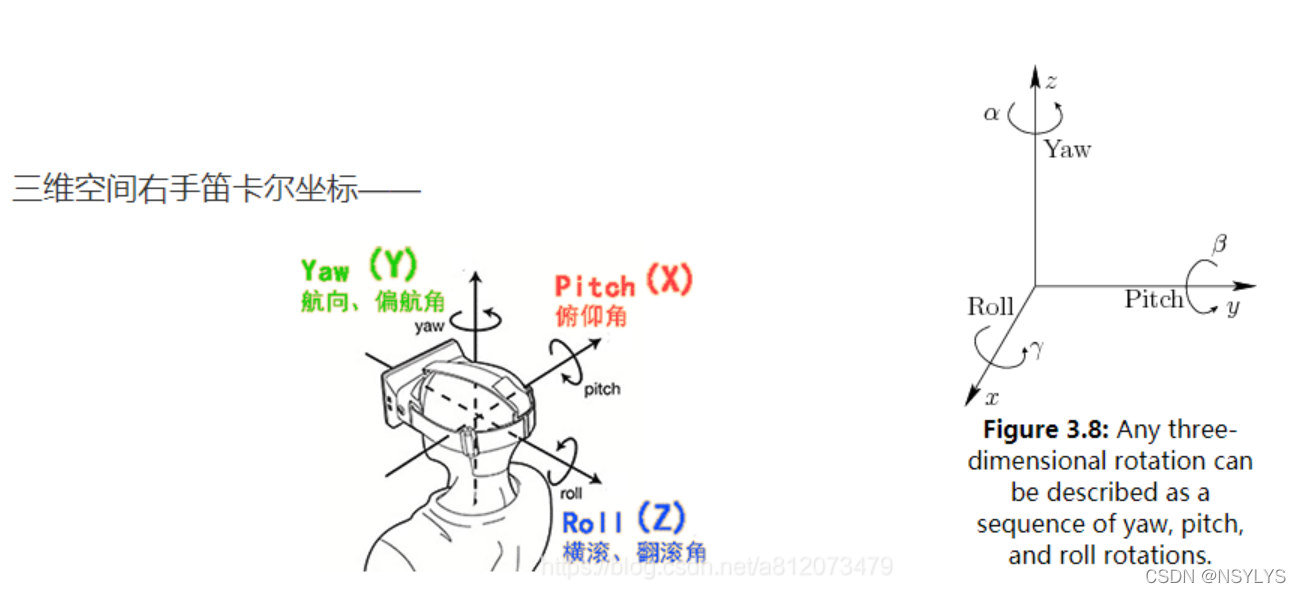
MPU6050的数据:
MPU6050输出的3个角的关系可由下图得到