小时候玩过四驱车的都知道,玩具里面的小马达长什么样。这次BLOG就是说小马达的事。现在小马达都升级了,安装了减速器和编码器。我在网上找到这个图片。见图1

图1 直流电机
这种小直流电机 ,6V电压就能正常驱动,3V也能动,就是慢,12V就很猛了。总之转速与扭力与电压成正比。
前面带齿轮部分就是减速器,它有一个固定的减速比值。
后面转盘与两个传感器组成编码器。
这次要谈的是电器部分。
一、编码器
编码器不是什么神奇的东西,它不能返回速度值,也不能返回转动角,也不返回正转反转的信号。我们要从它能够返回的信号中,设法解析得到我们需要的值。
编码器有光电的,有磁感的。我这个是磁感的。
这电机上的编码器与手摇编码器不同。
手遥的比较灵敏,这是因为两个传感器比较靠近,即它们到圆心的夹角比较小。例如30度。
本文的这个电机,两个传感器到图心的夹角是90度。见图2

图2?电机的编码器分析
C1和C2是传感器(霍尔元件的集成电路)。它输出的是一个开关量,假设感应到磁极时会输出高电平,否则输出低电平。(就像我们假设从正电到负电流向就是电流方向,实际上电子是从负电出发流向正电,但不影响我们研究。)单个的电路图见图3,PCB见图4。
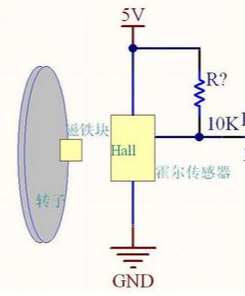 ? ?图3 单个霍尔传感器的电路原理图
? ?图3 单个霍尔传感器的电路原理图
 ?图4 电机的编码器的PCB
?图4 电机的编码器的PCB
? ? 我没有磁极检测仪器,我就用万用表测其中一个输出的电压,手动转动磁盘。磁盘就是那黑色个圆盘。转到一周,得到7个高电位的点。那么,我认为有7个磁极,而且磁极对应高电压。具体,磁极是N还是S,实际哪个位置点,这些我就不管了。
下面进行分析:
主轴(先不管减速器,主轴指电机本身的轴)转一周,单个传感器出现N=7次脉冲,而正转到反转的两个输出脉冲波有相位差,如图5
?
图5 正转与反转的相位图
?可以买一个“逻辑分析仪”(很便宜)接上ch1和ch2,电机通电5V,编码器也通电5V,就可以看到类似图5的脉冲波。(你可以在逻辑分析仪应用软件上测得波的时间,用作验证。这就不多说。)
我们还是从几何和数学角度分析。如图2。C1和C2是传感器,它们成90度夹角。k1,k2,k3...是磁极点。我们定义从减速器正面看顺时针为正转。那么编码器后面看逆时针就是正转。
我们认为磁极的夹角是A角=360/N=360/7。(约等于51度,记N=7)当k1正对着C1时,k3与C2的夹角是B角。
注意,C1与C2夹角=90,那就是4等分圆(记M=4)。除本文以外的电机编码器,必定存在N与M,而且N与M互质。所以角B不等于0。两个传感器电位不可能同时上升(沿)或下降(沿)。
相位差,这种原理我就不谈了,不拿微积分来说事。只要知道,两个波会有时间差。
(1)当C1对上k1,正向转动 t1 时间后,k3就对上C2。那么记角速度v,那么t1 = B/v
(2)当C1对上k1,反向转动 t2 时间后,k2就对上C2。那么记角速度v,那么t2 =(A-B)/v ; A=360/N
通过C1与C2夹角,当360/M>A>(360/M-A)也得到
t1 = (A-(360/M-A))/v
t2 = (360/M-A)/v
噢,{N,M}={7,4}则可以按上述公式,如果是别的值,需要画出几何图形,再作分析。
那就是说:
1.1 正反转的检测:
正转时,我得到一个常数A/(t1*v) = A/B = (360/N)/(360/N-(360/M-360/N))?= 1/(2 - N/M) = 4 ;
反转时也得到一个常数 A/(t2*v)?= A/(A-B)?=?(360/N)/(360/M-360/N) = 1/(N/M - 1) = 4/3 =1.3333 ;
上述这两个值,测量时是同一个变量。下面用算法说明。
我们设一个1us的定时器,当C1得到上升沿(外部中断)清零累加变量a,以后每1us让a++,当C2得到上升沿(外部中断),保存Cu=a,当第二次C1得到上升沿(外部中断),记下Au=a,然后重复。一段时候后,停下来。
取Au/Cu的值,如果Au/Cu>3 ,则为正转,否则为反转。
1.2 主轴转速检测:
我们让电机转到s秒,记转速V(单位,圈/分钟),转速与电压成正比。
C1每得到一次上升沿中断,代表主轴转过了360/N度,Au是时间(单位:1us)。1us=0.000001s,则转过360/N度所用时间0.000001*Au
我们得到方程 :(V*360)/60 = (360/N)/(0.000001*Au)
V = 60000000/(N*Au) =?8571428.5714f/Au
后面结合减速比,得到输出的转速。
1.3 主轴的行程:
我们让电机转到s秒,记行程C(单位,圈),
C1每得到一次上升沿中断,Ints++,得到C=Ints/N=Ints/7
二、直流电机
网上的Blog都在说要注意死区,那是因为他们都在用2003,而ULN2003就是达林顿放大器。现在都是用电机驱动芯片,例如我现在用的MX1616H,它有两点转入,一个正向PWM,一个反向PWM,需要正转时,给正向PWM,反向接地;需要反转时,正向接地,给反向PWM。不用管死区,芯片里面自己处理。
三、减速器
商家会给出减速比的值;也有的商家只给减速后的转速,没有减速比。
我们可以限制每次的行程,并观察减速后的转动角,反复试验,可得到比例 W=主轴圈数/输出圈数
3.1 转动角 记R = (int)(C/W*360) % 360
为什么要写这个?因为网上写的都是理论。但就差实际的东西。