移动监测运动平台-热成像校准-运动机构电子软件机械设计
测试设备 -移动机器人系统 包括机械设计,软件开发,电子程序开发。
并且完成了长时间测试以及听取使用同事建议完成 技术升级整改,可以结案。
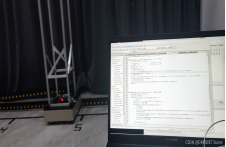
移动监测运动机器人机械部分:
热成像与人体感应测试平台
?? 包括了框架制作与设计,完成对原来方案的整改加固,场地规划运动设计;
?? 采用Inventer soldworks 三维建模,完成设备材料图纸输出,材料采购以及安装调试。
?? 将原来的感应目标移动更改为,传感器移动,对应目标做横向间隔一米运动。
结构增加了上下移动高度可调,以及履带传输供电设计。
移动监测运动机器人电子部分:
ABOV移动小车从机
ABOV从机移动效果
?? 采用ABOV芯片做主机与从机配合移动电脑端,完成设备见无线通讯以及异常判断和邮件测试自动发送等功能。
移动监测运动机器人软件:
- C#上位机开发(一)―― C#上位机基础
- C#上位机开发(二)―― C# 串口使用
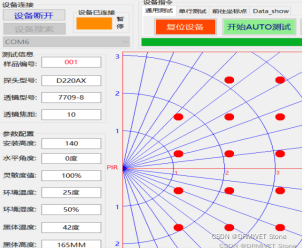
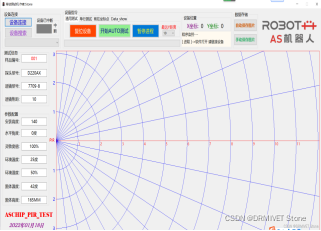
- C#上位机开发(三)―― C# 绘图方法
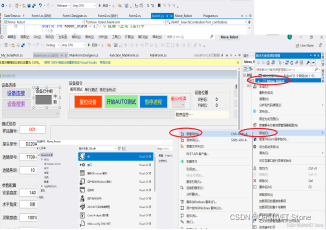
- C#上位机开发(四) ―― C# 软件截取软件界面并保存图片
- C#上位机开发(五) ―― C#上新建窗口并且处理 Winform高分辨率下的窗体显示模糊问题
?? 采用C# .net平台,该软件具有跨平台,面相对象编程思路,高移植性特定,一次编译处处运行。
?? 内部利用界面兼容方法,兼容各个大小尺寸屏幕。
?? 内部方法实现高速通讯,以及利用C# 双通道代理机制以及垃圾回收机制,异常捕获机制,使得软件长时间运行顺畅以及通讯延时小缓存高。
一、应用设定
1.应用场景设定
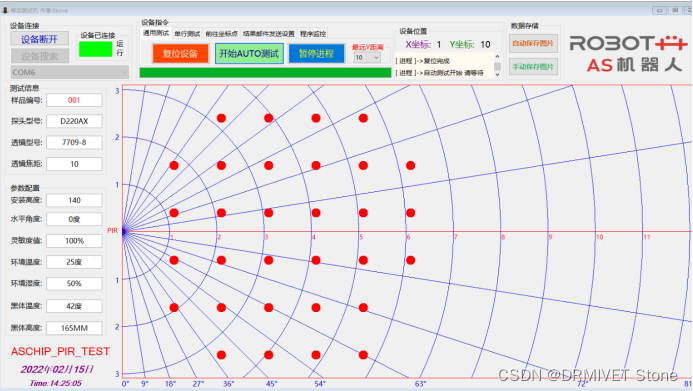
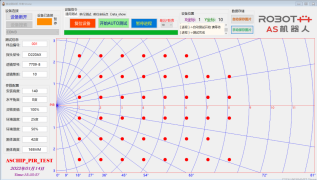
产品用于自动测试人体感应PIR对不同距离角度下感应效果.应用于多节点移动测试平台的程序控制。
2.所使用的方法
??.Inventor 3维建模
??.ABOV单片机作为机械控制IC
??.C# 作为管理员电脑终端控制软件
实现对两台运动机构的控制,并完成机构上待测产品的测试 并将数据回传到多路终端 。上位机软件实现用户端的体验
二、使用步骤
1.完成实验结构三维建模
2.完成运动机构芯片编程

1.通信模式的构想
2.完成从机ABOV程序调试

3.完成主机ABOV程序调试
3.C# 作为管理员电脑终端控制软件

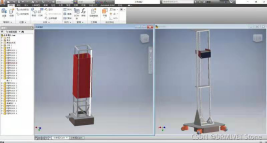
三、机械设计三维软件制作
1.效果图
2.实际安装图



四、ABOV 作为移动控制芯片软件制作
程序为双IC通讯,主从机接收与发送,电脑控制中继IC,中继IC处理电脑发送来的控制指令完成自动测试,定点测试,移动测试并且中继芯片向电脑发送执行情况以及异常情况。
中继芯片向从机移动芯片发送信号,发送移动,暂停,复位移动到,等指令。
从机芯片向主机发送完成情况以及异常情况。
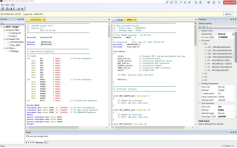
?? 从机代码
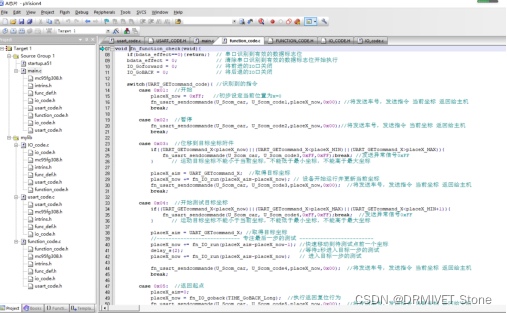
从机程序识别主芯片的无线信号,判断开始,暂停,移动目标位置,开始测试目标,返回起点复位IC等指令,判断是否有路障以及有通讯故障,将异常信号发回主芯片。
?? 主机代码
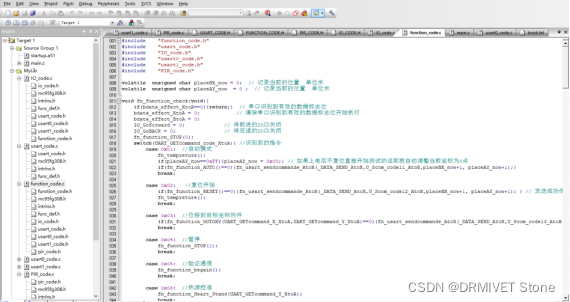
主机程序识别电脑以及从机芯片的无线信号,判断自动模式,复位开始,位移目标,暂停,验证通讯热源校准 等指令,判断是否有路障以及有通讯故障,将异常信号发回主芯片。


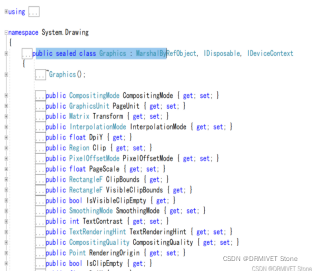
五、C# 作为管理员电脑终端控制软件
二、C# 绘图获取对象的几种方法
1 利用窗体或者控件的 Pain方法。(这个方法很关键)
2:调用控件以及对象的 CreateGraphics()
3: 绘图获取对象总结:
??. 第1个方法必须有,必须覆写到对应控件或者窗体的,Paint方法中。
?? 第2个方法一般做到按键中,当时执行绘制。
?? 第1,2 个方法 调用的绘制函数应该调用的绘制函数终端尽量一样,这样就不会发生 绘制不足短缺以及消失等问题。
三、C# 绘图的具体步骤
1:单机选中绘制板,这个啥都行,这里用到是一个图片控件。
2:选中事件控制器。
3:选中Paint方法并双击它在后台生成,对应的方法。
4:注意在Point_Box_Paint 重载 程序中必须引用对象体PaintEventArgs e
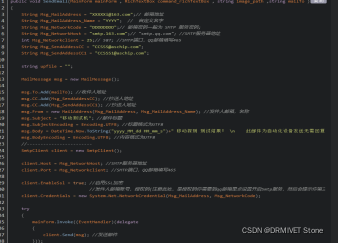
邮件的发送以及附件的添加
利用file代码打开对应的文件目录,调用 msg.Attachments.Add(new Attachment(upfile)) 类进行附件添加。