
可以看到,温度传感器DS18B20接在P14上并进行了上拉
sbit DQ=P1^4;我们通过单总线端口对温度传感器进行控制,步骤如下:

需要注意的是,通过单线总线的所有执行(处理)都从一个初始化序列开始。也就是说所有的操作前都需要初始化一次。
那么先要进行初始化:
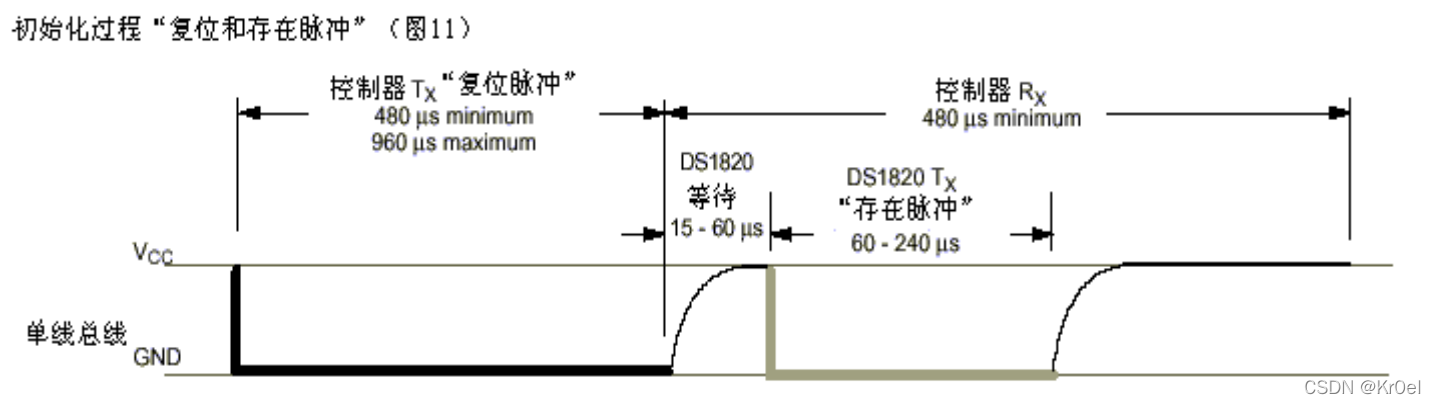
? ?根据时序图可以看出,我们需要先拉低,等待480us再拉高,接下来传感器自己拉低,控制完成
void Init_DS18B20(void)//传感器初始化
{
DQ=0;
Delay500us();
DQ=1;
Delay500us();
}初始化完成之后,就可以开始操作了
这时候我们需要用到ROM指令,主要用到三种:忽略、温度转换和读暂存器
第一种:忽略ROM指令

常规来讲,我们需要进行ROM识别来确定到自己想用的外设,但是P14上只有一个温度传感器,所以不需要识别,直接忽略即可
?
DS18B20_WriteByte(0XCC);?第二种:温度转换指令

?
Init_DS18B20();
DS18B20_WriteByte(0XCC);
DS18B20_WriteByte(0X44);?第三种:读暂存器指令

?在暂存器前需要进行初始化
Init_DS18B20();
DS18B20_WriteByte(0XCC);
DS18B20_WriteByte(0XBE);读数据的过程:
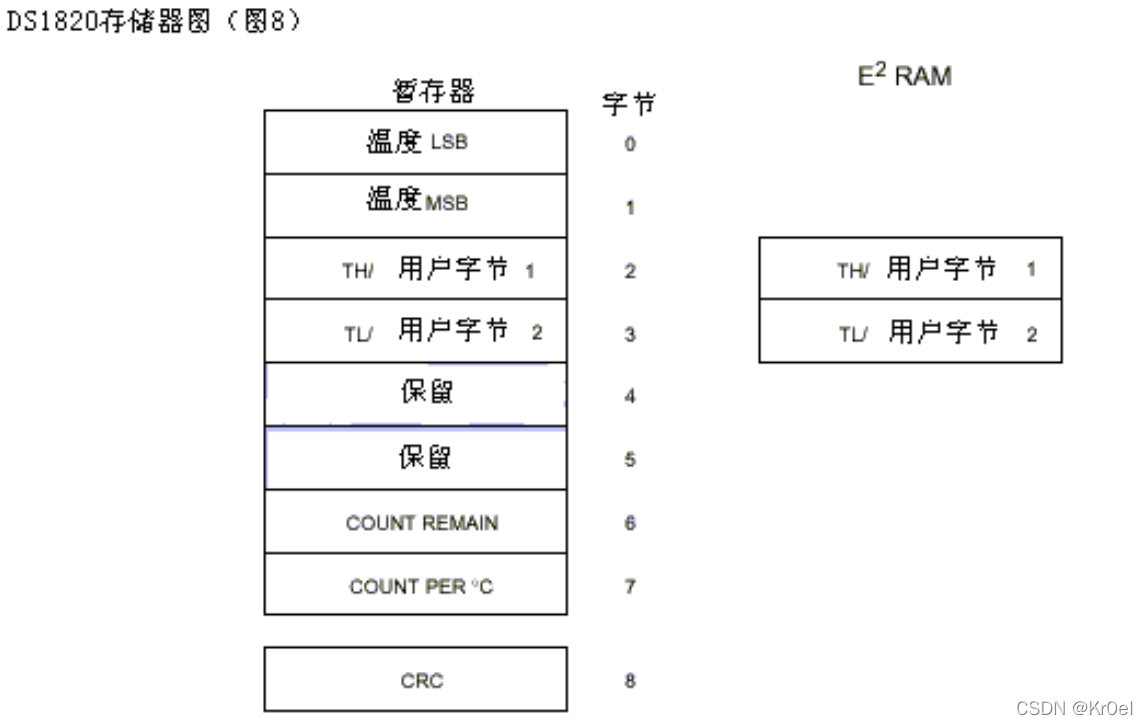
?从上到下依次进行读,我们只需要第一、二次读的温度低八位和高八位就够了
low=DS18B20_ReadByte();//第一次读低八位(byte0)
high=DS18B20_ReadByte();//第二次读高八位(byte1)温度/数据关系:
?
读写时序
这里注意所有的数据和指令的传递都是从最低有效位开始
写时序:
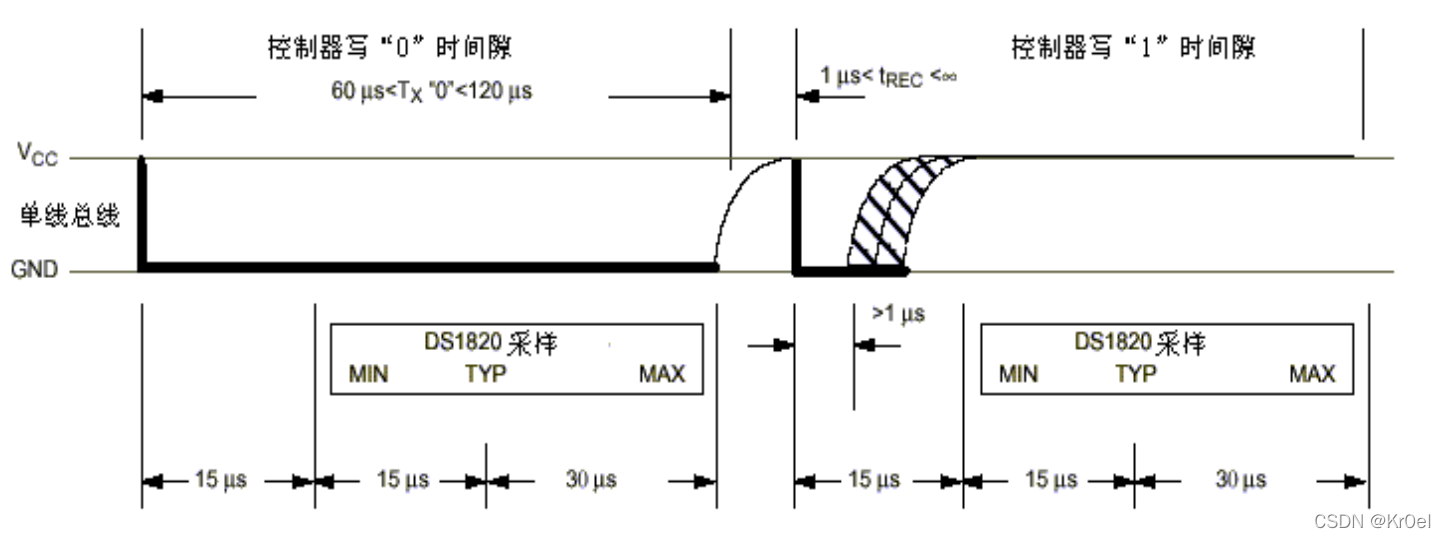
?先拉低,保持15us后DS18B20开始采集,此时若为低电平则DS18B20得到0,高电平则为1,总时长至少保持60us(从拉低到采集完)
void DS18B20_WriteByte(u8 dat)
{
u8 j;
for(j=0;j<8;j++)
{
DQ=0;
DQ=dat&0X01;//判断最后一位是高电平还是低电平
Delay80us();//最低60us
dat>>=1;//移位准备进行下一位的传输
DQ=1;
}
}读时序:
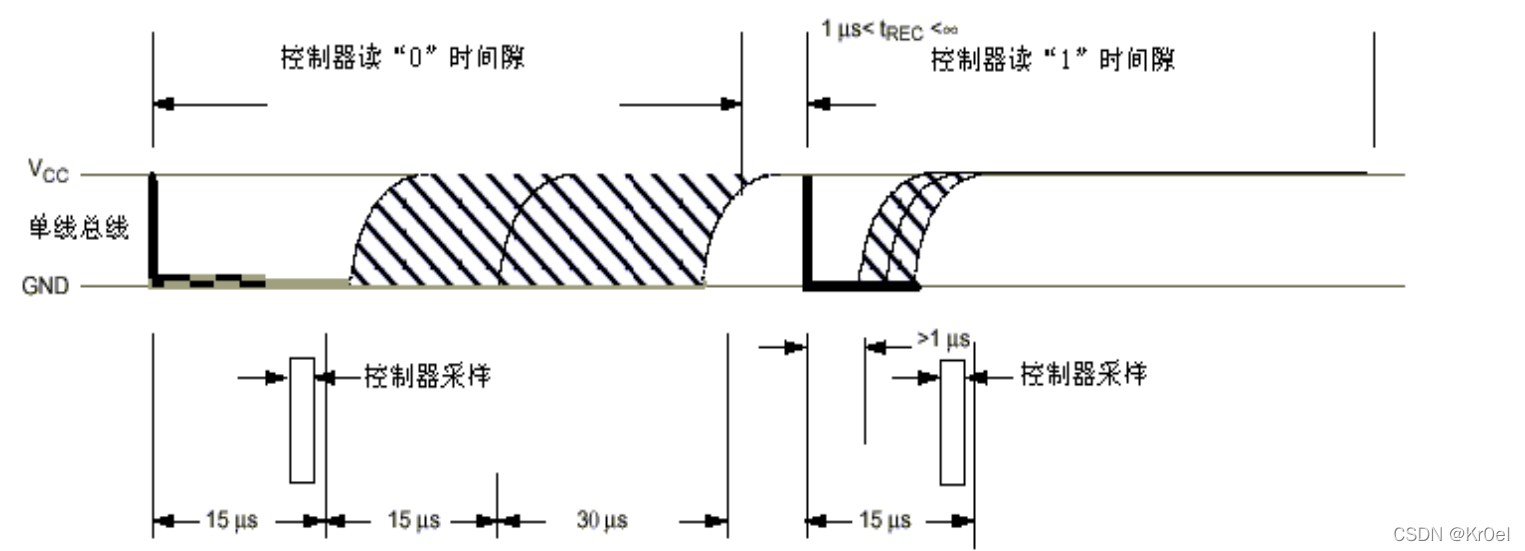
?先拉低,采样后拉高,然后根据DS18B20自身为0或1来读0或1
u8 DS18B20_ReadByte()
{
u8 i;
u8 dat=0;
for(i=0;i<8;i++)
{
DQ=0;
dat>>=1;
DQ=1;
if(DQ==1)
{
dat|=0X80;
}
Delay80us();
}
return dat;
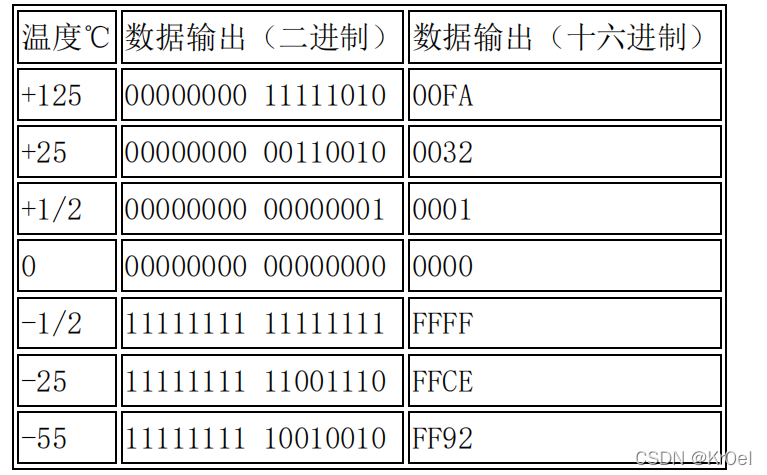
}?整理读到的数据:
低八位的后四位是小数点,高八位的前四位是正负表示,不需要的话需要清除
temp=high<<4;
temp=temp|(low>>4);如果需要读小数点的话:
temp=high&0x0f;//不显示正负
temp<<=8;
temp=temp|low;
temp=temp*625;//精度为0.0625最后整体代码
#include <STC15F2K60S2.H>
#include<intrins.h>
#define u8 unsigned char
#define u16 unsigned int
u8 yi,er,san,si,wu,liu,qi,ba;
u8 tab[]={0XC0,0XF9,0XA4,0XB0,0X99,0X92,0X82,0XF8,0X80,0X90,0XFF};
sbit DQ=P1^4;
u8 num,temper,tt;
void Allinit(void);
void DS18B20_WriteByte(u8 dat);
u8 TemperGet();
void Init_DS18B20(void);
void Delay500us(void);
void Delay80us();
void Delay100us(void);
u8 DS18B20_ReadByte();
void Display1(u8 yi,u8 er);
void Display2(u8 san,u8 si);
void Display3(u8 wu,u8 liu);
void Display4(u8 qi,u8 ba);
void Delay(u8 ms);
void main()
{
yi=10;er=10;san=10;si=10;wu=10;liu=10;qi=10;ba=10;
Allinit();
Init_DS18B20();
DS18B20_WriteByte(0XCC);
DS18B20_WriteByte(0X44);
while(1)
{
if(++tt==120)//隔一段时间进行显示
{
tt=0;
temper=TemperGet();
yi=temper/10;er=temper%10;
}
Display1(yi,er);
Display2(san,si);
Display3(wu,liu);
Display4(qi,ba);
}
}
u8 DS18B20_ReadByte()
{
u8 i;
u8 dat=0;
for(i=0;i<8;i++)
{
DQ=0;
dat>>=1;
DQ=1;
if(DQ==1)
{
dat|=0X80;
}
Delay80us();
}
return dat;
}
void DS18B20_WriteByte(u8 dat)
{
u8 j;
for(j=0;j<8;j++)
{
DQ=0;
DQ=dat&0X01;//判断最后一位是高电平还是低电平
Delay80us();//最低60us
dat>>=1;//移位准备进行下一位的传输
DQ=1;
}
}
u8 TemperGet()//开始工作
{
u8 low,high,temp;
Init_DS18B20();
DS18B20_WriteByte(0XCC);
DS18B20_WriteByte(0X44);
Delay500us();
Init_DS18B20();
DS18B20_WriteByte(0XCC);//进行下一个流程
DS18B20_WriteByte(0XBE);
low=DS18B20_ReadByte();
high=DS18B20_ReadByte();
temp=high<<4;
temp=temp|(low>>4);
return temp;
}
void Allinit(void)
{
P2=0X80;P0=0XFF;//LED灯
P2=0XA0;P0=0X00;//蜂鸣器,继电器
P2=0XC0;P0=0XFF;//数码管位选
P2=0XE0;P0=0XFF;//数码管全关闭
}
void Delatems(int ms)
{
int i,j;
for(i=0;i<ms;i++)
for(j=0;j<845;j++);
}
void Delay500us(void) //@11.0592MHz
{
unsigned char i, j;
_nop_();
_nop_();
i = 6;
j = 93;
do
{
while (--j);
} while (--i);
}
void Delay80us() //@11.0592MHz
{
unsigned char i;
_nop_();
_nop_();
_nop_();
i = 218;
while (--i);
}
void Init_DS18B20(void)//传感器初始化
{
DQ=0;
Delay500us();
DQ=1;
Delay500us();
}
void Display1(u8 yi,u8 er)
{
P2=0XC0;
P0=0X01;
P2=0XE0;
P0=tab[yi];
Delay(100);
P0=0XFF;
Delay(150);
P2=0XC0;
P0=0X02;
P2=0XE0;
P0=tab[er];
Delay(100);
P0=0XFF;
Delay(150);
}
void Display2(u8 san,u8 si)
{
P2=0XC0;
P0=0X04;
P2=0XE0;
P0=tab[san];
Delay(100);
P0=0XFF;
Delay(150);
P2=0XC0;
P0=0X08;
P2=0XE0;
P0=tab[si];
Delay(100);
P0=0XFF;
Delay(150);
}
void Display3(u8 wu,u8 liu)
{
P2=0XC0;
P0=0X10;
P2=0XE0;
P0=tab[wu];
Delay(100);
P0=0XFF;
Delay(150);
P2=0XC0;
P0=0X20;
P2=0XE0;
P0=tab[liu];
Delay(100);
P0=0XFF;
Delay(150);
}
void Display4(u8 qi,u8 ba)
{
P2=0XC0;
P0=0X40;
P2=0XE0;
P0=tab[qi];
Delay(100);
P0=0XFF;
Delay(150);
P2=0XC0;
P0=0X80;
P2=0XE0;
P0=tab[ba];
Delay(100);
P0=0XFF;
Delay(150);
}
void Delay(u8 ms) //1毫秒@11.0592MHz
{
u8 i;
for(i=0;i<ms;i++)
{
AUXR |= 0x80; //定时器时钟1T模式
TMOD &= 0xF0; //设置定时器模式
TL0 = 0xCD; //设置定时初始值
TH0 = 0xD4; //设置定时初始值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
}
}