вЛЁЂМђНщ
AUTOSAR ЈC AUTomotive Open Systems ARchitecture,ЦћГЕПЊЗХЯЕЭГМмЙЙЁЃ
?
1.гХЪЦ:
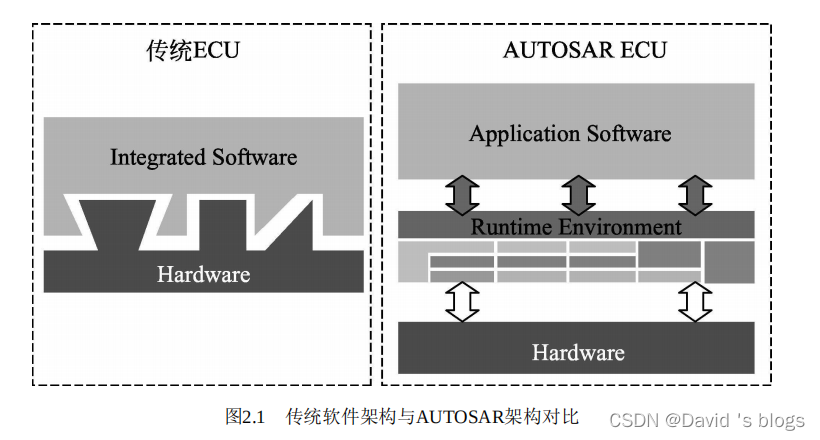
ЂйгаРћгкЬсИпШэМўИДгУЖШ,гШЦфЪЧПчЦНЬЈЕФИДгУЖШ;
ЂкБугкШэМўЕФНЛЛЛгыИќаТ;
ЂлШэМўЙІФмПЩвдНјааЯШЦкМмЙЙМЖБ№ЕФЖЈвхКЭбщжЄ,ДгЖјФмМѕЩйПЊЗЂДэЮѓ;
ЂмМѕЩйЪжЙЄДњТыСП,МѕЧсВтЪдбщжЄИКЕЃ,ЬсИпШэМўжЪСП;
ЂнЪЙгУвЛжжБъзМЛЏЕФЪ§ОнНЛЛЛИёЪН,ЗНБуИїЙЋЫОжЎМфЕФКЯзїНЛСїЕШЁЃ
2.ЙцЗЖ:
AUTOSARЙцЗЖжївЊАќРЈ:ЗжВуМмЙЙЁЂЗНЗЈТлКЭгІгУНгПкШ§ВПЗжФкШнЁЃ
AUTOSAR ЬсЙЉСЫжИЖЈдк ECU ЩЯМЏГЩШэМўзщМўЫљашЕФЫљгаЗНУцЕФЗНЗЈ,вдМАНЋВЛЭЌЕФ ECU МЏГЩЕНИїжжВЛЭЌзмЯпЯЕЭГЩЯЕФећИіЭјТчЭЈаХЕФЗНЗЈЁЃИУЗНЗЈЖЈвхСЫЛюЖЏЖдЙЄзїВњЦЗЕФвРРЕад,дЄМЦНЋжЇГжAUTOSARжаЙЄОпЕФЛюЖЏ,УшЪіКЭЪЙгУЁЃ
УшЪі (.arxml) Лљгк AUTOSAR ФЃАх,етаЉФЃАхЖЈвхСЫе§ЪННЛЛЛИёЪН(AUTOSAR Schema)вдМАгыНЛЛЛИёЪНвЛЦ№ЪЙгУЕФгявхдМЪјЁЃУшЪігУгкБЃДцдк AUTOSAR ЗНЗЈжаЩњГЩЛђЪЙгУЕФаХЯЂЁЃИїжжЩњГЩЦїПЩвдРћгУУшЪіжаЕФаХЯЂРДжЇГж RTE КЭ AUTOSAR ЛљБОШэМў(АќРЈВйзїЯЕЭГ)ЕФХфжУКЭЩњГЩЁЃ
ЖўЁЂAutoSarМмЙЙЗжВуМмЙЙ
1.ИїECUжЎМфЭЈаХ
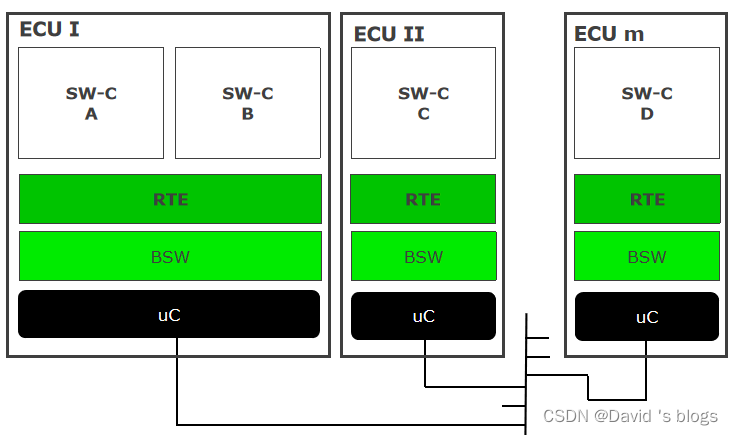
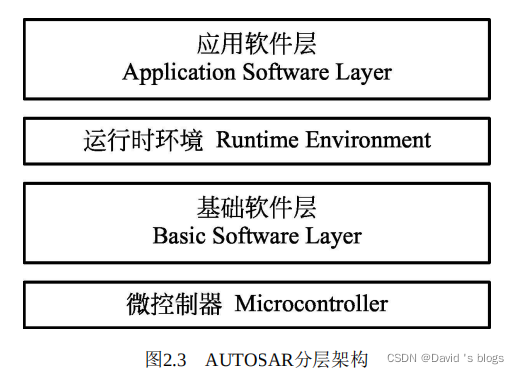
2.змЬхМмЙЙ:4Ву
 УПвЛВужЛФмЪЙгУЯТвЛВуЫљЬсЙЉЕФНгПк,ВЂЯђЩЯвЛВуЬсЙЉЯргІЕФНгПкЁЃ?
УПвЛВужЛФмЪЙгУЯТвЛВуЫљЬсЙЉЕФНгПк,ВЂЯђЩЯвЛВуЬсЙЉЯргІЕФНгПкЁЃ?
3.ИїВуМђЪі:
(1)гІгУШэМўВу(Application Software Layer,ASW):АќКЌШєИЩИіШэМўзщМў(Software Component,SWC),ШэМўзщМўМфЭЈЙ§ЖЫПк(Port)НјааНЛЛЅЁЃУПИіШэМўзщМўПЩвдАќКЌвЛИіЛђепЖрИідЫааЪЕЬх(Runnable Entity,RE),дЫааЪЕЬхжаЗтзАСЫЯрЙиПижЦЫуЗЈ,ЦфПЩгЩRTEЪТМў(RTE Event)ДЅЗЂЁЃ
(2)дЫааЪБЛЗОГ(Runtime Environment,RTE):RTEЗтзАСЫЛљДЁШэМўВуЕФЭЈаХКЭЗўЮё,ЮЊгІгУВуШэМўзщМўЬсЙЉСЫБъзМЛЏЕФЛљДЁШэМўКЭЭЈаХНгПкЁЃ
(3)ЛљДЁШэМўВу(Basic Software Layer,BSW):?гжПЩвдЗжШ§Ву
(4)гВМўВу(HardWare):MCUаОЦЌ
Ш§ЁЂMCAL
1.МђЪі
McalЪЧBSWВужаЕФзюЯТВу,етРяЕЅЖРФУГіРДНВ;
дкЮвРэНт,етвЛВуЕФДњТыжБНггыгВМўДђНЛЕР,ОЭЯёЪЧЕЅЦЌЛњжаЕФHALПтЛђепБъзМЙЬМўПт+BSPАхМЖжЇГжАќ,етВПЗжДњТыПЩвджБНгЧ§ЖЏаОЦЌв§НХвдМАЦЌФкзЪдДЁЃ
ХфжУMcalВуЫљЪЙгУЕНЕФEB-Tresos,ОЭРрЫЦгкSTM32CubeMXЙЄОп,гУЭМаЮЛЏНчУцЕФЙЄОпХфжУЙмНХ(GPIO DIO PWM ADC SPI...ЕШЕШ)ЁЂЪБжгЁЂЗжЦЕЕШЕШ....
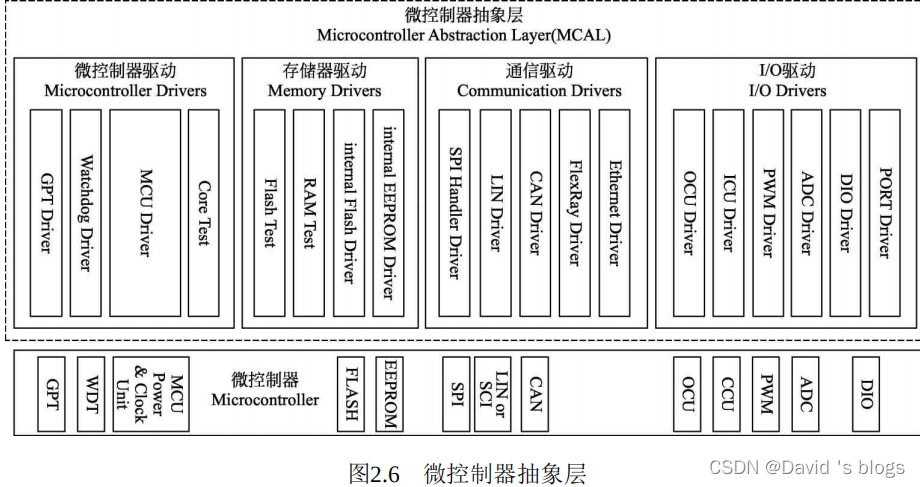
ШчЭМ:EB-TresosХфжУMCAL:
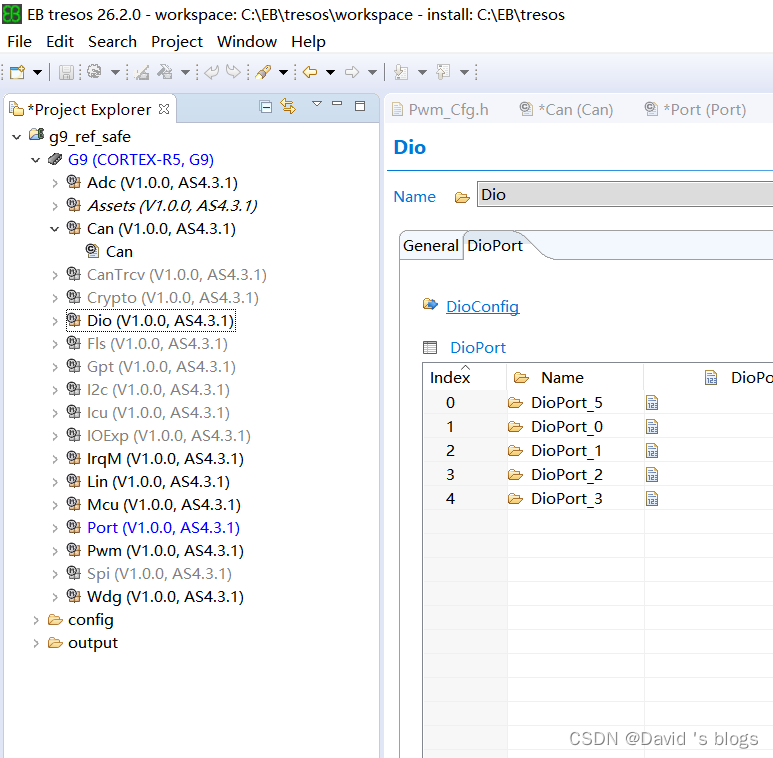
2.ИїЧ§ЖЏФЃПщ
PORT:ЖдЕЅЦЌЛњИїв§НХЪєадЕФХфжУ;MCUУПИів§НХЖМЪЧвЛИіport,Ждportв§НХЕФЗНЯђ(ЪфШыЛђЪфГі)ЁЂдЫааЦкМфв§НХЗНЯђЕФПЩБфадЁЂв§НХЕФЙЄзїФЃЪНЁЂдЫааЦкМфв§НХЙЄзїФЃЪНЕФПЩБфадЁЂв§НХЕФГѕЪМжЕЁЂФкВПЩЯРЕФМЄЛюЕШНјааХфжУЁЃ
DIO:digital i/o ,МДЕЅЦЌЛњжаGPIO;AUTOSARжа,НЋвЛИіЕЅЦЌЛњЪ§зжI/Oв§НХ(Pin)ЖЈвхЮЊDIOЭЈЕР(Dio channel),ПЩАбШєИЩИіDIOЭЈЕРЭЈЙ§гВМўЗжзщГЩЮЊвЛИіDIOЖЫПк(DIO Port),DIOЖЫПкжаЯрСкМИИіDIOЭЈЕРЕФТпМзщКЯдђГЦЮЊDIOЭЈЕРзщ(DIO Channel Group)ЁЃ
DioФЃПщжаЩцМАЕФDIO Channel,МДЕЅЦЌЛњв§НХ(Pin),гУжЎЧА,БиаыдкPORTФЃПщжаХфжУв§НХЪєадЮЊGPIOЁЃ
ADC:Analog-to-Digital Converter Driver ФЃ/Ъ§зЊЛЛЕЅдЊЁЃ
PWM:pluse width modulation ТіПэЕїжЦ;ПЩВњЩњеМПеБШКЭжмЦкЖМПЩИФБфЕФТіГх;гІгУГЁОА:ЕїНкЕЦЙтССЖШ ЕїНкЕчЛњзЊЫйЕШ...
ICU:ЪфШыВЖЛё input capture unit
OCU:ЪфГіБШНЯ
Ethernet:вдЬЋЭј
FlexRay:УЛМћЙ§ гІИУВЛживЊ
CAN:CanЭЈаХЧ§ЖЏ
LIN:змЯпЯрЙиНгПк
SPI:вЛАуОЭЪЧгУРДЖСаДДцДЂЦї
EepROM:ЭтВПДцДЂЦї
Flash: ФкВП ЭтВП?
RAM:NMRAM : вЛИіРраЭЕФЖЋЮї
Core:
MCU:(Microcontroller Unit Driver ЬсЙЉЮЂПижЦЦїЕФГѕЪМЛЏЁЂИДЮЛЁЂанУпЕШЙІФм;ЪЙФмMCUЪБжг;ЩшжУMCUЪБжгЯрЙиЕФВЮЪ§(:CPUЪБжгЁЂЫјЯрЛЗ(PLL) ЁЂЭтЩшЪБжгЁЂдЄЗжЦЕЦїЕШ);НјШыЕЭЙІКФФЃЪН
WatchDog:ПДУХЙЗ
GPT:((General Purpose Timer Driver) ЭЈгУЖЈЪБЦї,гВМўЖЈЪБЦї;ЬсЙЉЦєЖЏКЭЭЃжЙгВМўЖЈЪБЦїЁЂЕУЕНЖЈЪБЦїЪ§жЕЁЂПижЦЪБМфДЅЗЂЕФжаЖЯЁЂПижЦЪБМфДЅЗЂЕФжаЖЯЛНабЕШЙІФмЁЃ
ЁОMCALВуЕФИїЧ§ЖЏПДетЦЊВЉПЭ,аДЕФКмЯъЯИЁП
ЭМНтAUTOSAR(Юх)ЁЊЁЊЮЂПижЦЦїГщЯѓВу(MCAL)_ЗЪрНрНЕФзѓЮРУХ-CSDNВЉПЭ_autosar mcal
ЫФЁЂBSW
1.BSWВуЕФФкВПЗжВуМмЙЙ
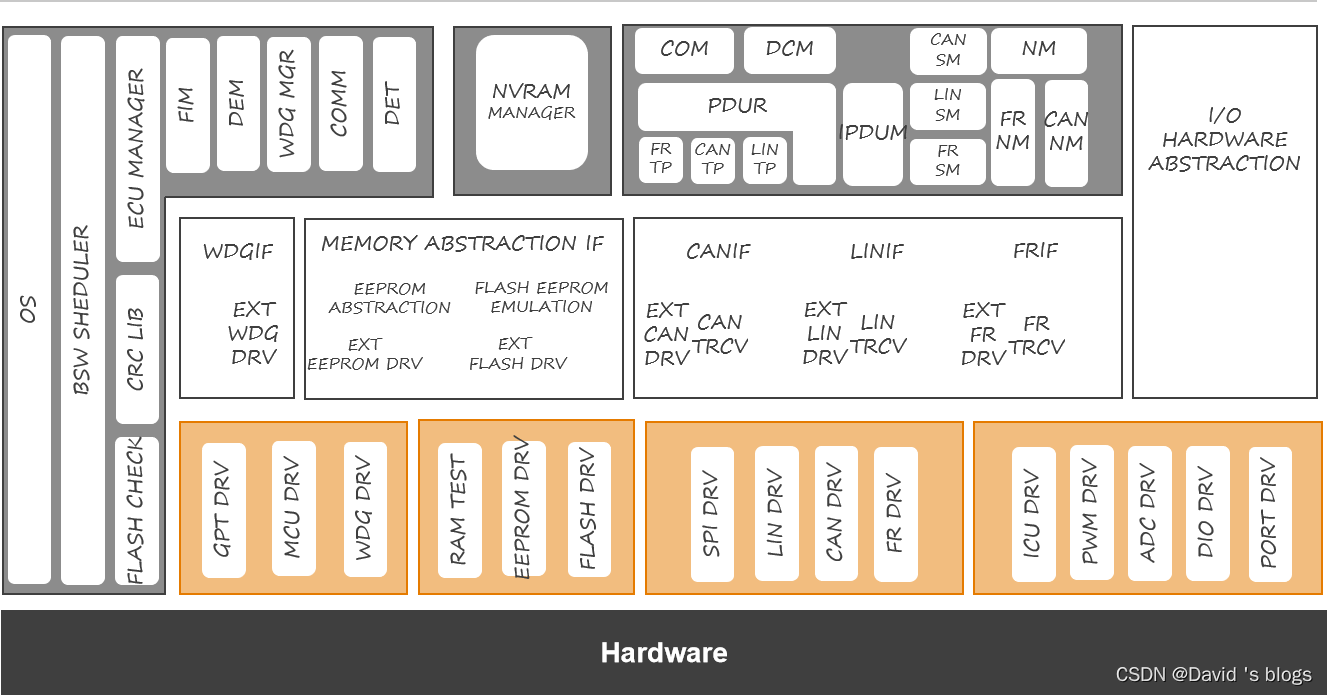
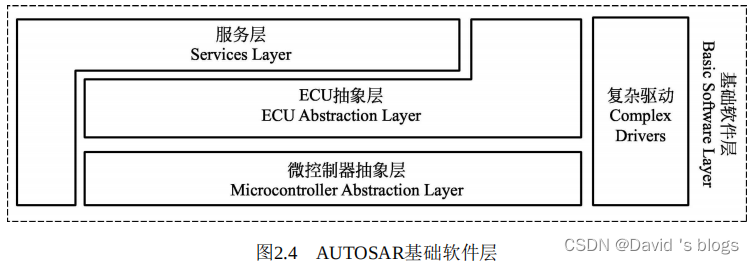
?AUTOSAR?BSW:ЬсЙЉЛљДЁШэМўЗўЮё,АќРЈБъзМЛЏЕФЯЕЭГЙІФмвдМАЙІФмНгПк,ВЂЧвгЩвЛЯЕСаЕФЛљДЁЗўЮёШэМўзщМўЙЙГЩ,АќРЈЯЕЭГЗўЮёЁЂФкДцЗўЮёЁЂЭЈаХЗўЮёЕШЁЃ
(1)BSW-ЗўЮёВу :OSЯЕЭГЗўЮёЁЂДцДЂЦїЗўЮё,ЭЈаХЗўЮё?(ЯёJavaГЬађЕФЗўЮё,гІгУВуЕїгУЗўЮёВуЕФЗўЮёНгПкЭъГЩЩЯВувЕЮёТпМ,ВЛашвЊЙиаФЯТУцдѕУДЪЧЪЕЯж)ЁЃ
(2)BSW-ECUГщЯѓВу:ПДУХЙЗГщЯѓ,ДцДЂЦїгВМўГщЯѓ,ЭЈаХгВМўГщЯѓ,ioгВМўГщЯѓЁЃ
ПДECUГщЯѓВуЕФЮЛжУ ЩЯВуЪЧЗўЮё ЯТВуЪЧгВМўЧ§ЖЏ,ЫљвдетвЛВуЕФФПЕФОЭЪЧ:ЪЙЩЯВуШэМўгыECUгВМўЩшМЦЮоЙиЁЃ
(3)MCALЧ§ЖЏВу:ЮЂПижЦЦїЧ§ЖЏ,ДцДЂЦїЧ§ЖЏ,ЭЈаХЧ§ЖЏЁЃ
ЭЌЪБ,ЛљДЁШэМўВуФЃПщАДееРраЭПЩвдЗжЮЊЧ§ЖЏФЃПщЁЂНгПкФЃПщЁЂДІРэФЃПщвдМАЙмРэЦїЁЃ
1ЁЂЧ§ЖЏФЃПщЧ§ЖЏФЃПщАќКЌСЫПижЦКЭЪЙгУФкВПЛђепЭтВПЦїМўЕФЙІФм,ЗжЮЊФкВПЧ§ЖЏКЭЭтВПЧ§ЖЏЁЃ
(1)ФкВПЧ§ЖЏФкВПЦїМўЮЛгкЮЂПижЦЦї(ЕЅЦЌЛњ)ЕФФкВП,Р§ШчФкВПEEPROMЁЂФкВПCANПижЦЦїЁЂФкВПADCФЃПщЕШЁЃФкВПЧ§ЖЏГЬађОЭЪЧеыЖдЕЅЦЌЛњФкВПЦїМўзЪдДЕФЧ§ЖЏГЬађ,етВПЗжЧ§ЖЏГЬађЪєгкЮЂПижЦЦїГщЯѓВу(MCAL)ЁЃ
(2)ЭтВПЧ§ЖЏЭтВПЦїМўЪЧжИЕЅЦЌЛњЭтВПЕФECUгВМў,БШШчЭтВПEEPROMЁЂЭтВППДУХЙЗЁЂЭтВПFlashЕШЁЃЭтВПЧ§ЖЏГЬађОЭЪЧеыЖдЕЅЦЌЛњЭтВПгВМўзЪдДЕФЧ§ЖЏГЬађ,ЪєгкECUГщЯѓВуЁЃЭтВПЧ§ЖЏГЬађашвЊЭЈЙ§ЮЂПижЦЦїГщЯѓВу(MCAL)Ч§ЖЏГЬађРДЪЕЯжЖдЭтВПЦїМўЕФЧ§ЖЏЁЃетжжЗНЗЈЯТAUTOSARвВжЇГжЧЖШыдкЯЕЭГЛљДЁаОЦЌ(SBCs)жаЕФзщМў,ЯёЪеЗЂЦївдМАПДУХЙЗЕШЁЃР§Шч,ЪЙгУSPIЭЈаХНгПкЕФЭтВПEEPROMЧ§ЖЏГЬађЪЧЭЈЙ§SPIзмЯпДІРэГЬађРДЧ§ЖЏЭтВПEEPROMЕФЁЃЕЋЪЧгавЛжжР§Эт,ЖдгкКЭФкДцгГЩфЯрЙиЕФЭтВПЦїМў(ШчЭтВПFlashДцДЂЦї),ЦфЧ§ЖЏГЬађЪЧПЩвджБНгЖдЮЂПижЦЦїНјааДцШЁЗУЮЪЕФ,ЫљвдетВПЗжЧ§ЖЏГЬађЪєгкЮЂПижЦЦїГщЯѓВу(MCAL)ЁЃ
2ЁЂНгПкФЃПщАќКЌСЫЖдЦфДЮМЖФЃПщНјааГщЯѓЕФЙІФм,БШШчЖдвЛИіЬиЖЈЙІФмЕФгВМўНјааГщЯѓЁЃЫќЬсЙЉвЛИіЭЈгУЕФНгПкКЏЪ§(API)РДЗУЮЪвЛжжЬиЖЈЕФЦїМўРраЭ,ЧвгыИУРраЭЦїМўЕФЪ§ФПЮоЙи,ЭЌЪБвВгыЦїМўЕФОпЬхгВМўЪЕЯжЮоЙиЁЃНгПкФЃПщВЛЛсИФБфЪ§ОнЕФФкШнЁЃвЛАуРДЫЕ,НгПкЪєгкECUГщЯѓВуЁЃР§Шч,CANЭЈаХЯЕЭГЕФНгПкФЃПщЬсЙЉвЛИіЭЈгУЕФНгПкКЏЪ§РДЗУЮЪCANЭЈаХЭјТч,ВЂЧвгыECUЩЯCANПижЦЦїЕФЪ§ФПвдМАгВМўЪЕЯжЮоЙиЁЃ
3ЁЂДІРэФЃПщЪЧвЛИізЈгУЕФНгПк,ЫќПижЦвЛИіЛђЖрИіПЭЛЇЖЫЖдвЛИіЛђЖрИіЧ§ЖЏГЬађНјааВЂааЁЂЖрживдМАвьВНЕиЗУЮЪЁЃвВОЭЪЧЫЕ,ЫќЦ№зХЛКГхЁЂЖгСаЁЂжйВУвдМАЖрТЗИДгУЕФЙІФмЁЃЭЌЪБ,ДІРэГЬађвВВЛЛсИФБфЪ§ОнБОЩэЕФФкШнЁЃДІРэФЃПщЭЈГЃЛсВЂШыЧ§ЖЏГЬађЛђЪЧНгПкФЃПщжа(ШчSPIHandlerDriverЁЂADC DriverЕШ)ЁЃ
4ЁЂЙмРэЦїЮЊЖржиЕФПЭЛЇЖЫЬсЙЉЬиЖЈЕФЗўЮёЁЃЕБЕЅДПЕФДІРэГЬађВЛФмТњзуЖдЖржиЕФПЭЛЇЖЫНјааГщЯѓЪБ,ОЭашвЊгУЕНЙмРэЦїРДНјааДІРэЁЃГ§СЫДІРэЙІФмЭт,ЙмРэЦїЛЙПЩвдЖдЪ§ОнФкШнНјааЦРЙРЁЂИФБфЛђЪЧЪЪгІЪ§ОнФкШнЁЃвЛАуЖјбд,ЙмРэЦїЪєгкЗўЮёВуЁЃР§Шч,ЗЧвзЪЇадЫцЛњДцДЂЦї(NVRAM)ЕФЙмРэЦїИКд№ЖдФкВПЛђЪЧЭтВПДцДЂЩшБИНјааВЂааЕФЗУЮЪ,ШчFlashЁЂEEPROMДцДЂЦїЕШЁЃЭЌЪБ,ЫќвВПЩвдЭъГЩЗжВМЪНВЂЧвПЩППЕФЪ§ОнДцДЂЁЂЪ§ОнаЃбщвдМАФЌШЯжЕЕФЙцЖЈЕШЁЃзмНсЯТРДОЭЪЧ:BSWжївЊЬсЙЉ4ИіЗўЮё:ЭЈаХ ДцДЂ ЯЕЭГ ИДдгЧ§ЖЏ
2.ЭЈаХЗўЮё
2.1МђЪі
ЭЈаХЗўЮё(Communication Services):АќРЈCANЁЂLINЁЂFlexRayдкФкЕФећГЕЭјТчЯЕЭГЁЂECUЭјТчМАШэМўзщМўФкЕФЗУЮЪНјааСЫЭГвЛЗтзА,ФЃПщдђЭЈЙ§ЭЈаХгВМўГщЯѓВуНјааЭЈаХ:
(1)ЖдЩЯВуЕФгІгУШэМўВувўВиСЫавщвдМАБЈЮФЪєад
(2)ЬсЙЉСЫЭГвЛЕФзмЯпЭЈаХНгПкЙЉгІгУШэМўВуЕїгУ
(3)ЬсЙЉСЫЭГвЛЕФЭјТчЙмРэЗўЮё
(4)ЬсЙЉСЫЭГвЛЕФеяЖЯЭЈаХНгПк
2.2етРягУCanЭЈаХОйР§
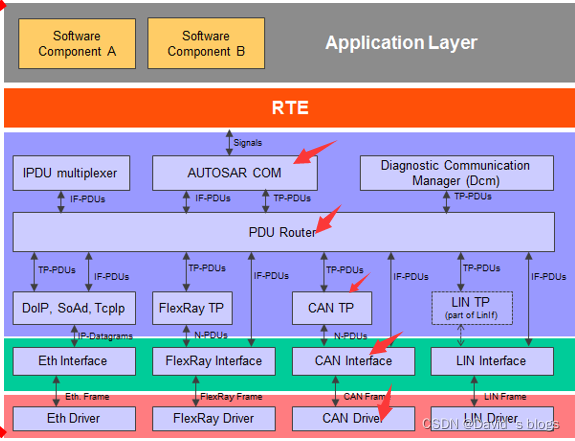
?ШчЭМЫљЪО:ЭъГЩCanЭЈаХЕФећИіЙ§ГЬ,BSWжївЊХфжУ5ИіФЃПщ:ComЁЂPduRЁЂCanTpЁЂCanIfЁЂCanЁЃ
1.ComФЃПщНщЩм:
ЂйдЫаадкRTE-PduRжЎМф,НЋаХКХзАдиЕНI-PDUжаЗЂЫЭ,ДгНгЪеЕНЕФI-PDUжаНтЮіГіаХКХ;
ЂкЬсЙЉаХКХТЗгЩЙІФм,НЋНгЪеЕНЕФI-PDUжаЕФаХКХДђАќЕНЗЂЫЭI- PDUжа;
ЂлЭЈаХЗЂЫЭПижЦ(ЦєЖЏ/ЭЃжЙI-PDUзщ);
ЂмЗЂЫЭЧыЧѓЕФгІД№ЕШ.2.ЩЯЭМЕФЪ§ОнСїГЬ:
BSWЕїЖШЦїжмЦкадЕїгУComФЃПщЕФCom_MainFunction_TxКЏЪ§,ComФЃПщНЋДгЦфЛКДцЦїжаЖСШЁашЗЂЫЭЕФЪ§Он;
ComФЃПщЕФCom_MainFunction_TxКЏЪ§НЋЕїгУPduRФЃПщЕФPduR_ComTransmitКЏЪ§,НЋЪ§ОнДЋИјPduRФЃПщ;
CanTpЗжЧщПі ,гаЕФашвЊОЙ§ гаЕФВЛОЙ§ЁЃ
PduRФЃПщТЗгЩЕНCAN InterfaceФЃПщ,ЕїгУCanIf_TransmitКЏЪ§,етбљЪ§ОнДгPduRФЃПщДЋИјСЫЯТВуЕФCAN InterfaceФЃПщ;
CAN InterfaceФЃПщдйЕїгУCan DriverФЃПщЕФCan_WriteКЏЪ§,НЋЪ§ОнаДШыЯргІЕФМФДцЦї;
гыCANНгЪеЙІФмвЛбљ,Can_WriteКЏЪ§НЋЗУЮЪжйВУ,Ъ§ОнГЄЖШКЭЪ§ОнМФДцЦї,НЋЪ§ОнаДШыЁЃ3.ХфжУЭЈаХФЃПщCanЙ§ГЬ
Com :ФПЕФЪЧдкЩЯВуRTEКЭЯТВуPDUТЗгЩЦїжЎМфНЈСЂЯЕЭГЭЈаХ,ЖјВЛПМТЧЭЈаХавщ.
ComФЃПщЛёШЁгІгУВуЕФаХКХ(Signal),ОвЛЖЈДІРэЗтзАЮЊI-PDU(Interaction Layer Protocol Data Unit)ЗЂЫЭЕНPduRФЃПщ
аХКХI-DPUПЩвдАќКЌвЛИіЛђЖрИіаХКХ,ПЩвдРэНтЮЊвЛИіI-PDUЮЊвЛжЁCANЯћЯЂ,аХКХОЭЪЧdbcжаЖЈвхЕФЁЃ(DBCОЭЪЧcanаХКХЕФУшЪіЮФМў)
ШчЙћашвЊНЋЖрИіаХКХЗЂЫЭЕНЭЌвЛI-PDU,дђаХКХПЩвдНјвЛВНаЮГЩаХКХзщЁЃCOMФЃПщАќКЌСНИіжївЊЕФВПЗж,ЗжБ№ЮЊComGeneralКЭComConfig
ComGeneral
ComConfigurationUseDet:ШчЙћДЫВМЖћВЮЪ§ЩшжУЮЊON,дђШЮКЮЕБCOMФЃПщГіЯжДэЮѓЪБ,ЛсЕїгУDet_ReportErrorКЏЪ§,МЧТМдкDETФЃПщжаЁЃ
ComCancellationSupport:етЪЧвЛИіВМЖћВЮЪ§,гУгкЦєгУ/НћгУгУгкШЁЯћPDUДЋЪфЧыЧѓЕФШЁЯћЙІФмЁЃ
ComEnableSignalGroupArrayApi:етЪЧвЛИіВМЖћВЮЪ§,гУгкМЄЛю/НћгУаХКХзщеѓСаЗУЮЪAPIЁЃ
ComSupportedIPduGroups:ЫќЪЧвЛИіећЪ§ВЮЪ§,гУгкЫЕУїЫљжЇГжЕФIPDUзщЕФзюДѓЪ§СПЁЃ
ComVersionInfoApi:ВМЖћВЮЪ§,гУгкМЄЛю/НћгУАцБОаХЯЂAPI Com_GetVersionInfoЁЃ
ComRetryFailedTransmitRequests:ШчЙћДЫВЮЪ§ЩшжУЮЊtrue,дђЦєгУжиЪдЪЇАмЕФДЋЪфЧыЧѓЁЃ
ComEnableMDTForCyclicTransmission:ШчЙћЦєгУДЫбЁЯю,дђЫќНЋдкI-PDUЕФбЛЗДЋЪфКЭжиИДДЋЪфжЎМфЬсЙЉзюаЁбгГйЪБМфМрЪг
ComConfig:ЫќАќКЌЫФИіШнЦї,ЗжБ№ЮЊComSignalsЁЂComIPdusЁЂComIPduGroupsЁЂComSignalGroupsЁЃ
ComIPdus:ИУШнЦїгУгкЮЊВЛЭЌЕФIPDUВЮЪ§ЬсЙЉЖЈвх,ШчЙћУЛгаИУВЮЪ§,дђЮоЗЈЭЈЙ§COMФЃПщНјааЭЈаХЁЃComIPduвВЭЈЙ§ComPduIdRefСДНгЕНPDUЁЃI-PDUАќКЌвЛИіЛђЖрИіаХКХКЭ/ЛђаХКХзщ
ComIPduHandleId:етЪЧЗжХфЮЊИУIPDUЕФIDЕФЪ§зжжЕЁЃДЫIDгУгкдкИїжжЗЂЫЭКЭНгЪеAPIЕїгУвдМАЯргІЕФЛиЕїAPIжав§гУДЫIPDUЁЃ
ComPduIdRef:ЫќЬсЙЉЖдCOMеЛЕФШЋОжPDUНсЙЙЕФв§гУЁЃ
ComIPduGroupRef:ЫќЪЧжИIPDUЫљЪєЕФIPDUзщЁЃ
ComIPduSignalRef:ЬсЙЉЖдИУIPDUжаАќКЌЕФЫљгааХКХЕФв§гУЁЃвЛИіIPDUПЩвдАќКЌвЛИіЛђЖрИіЕЅЖРЕФаХКХЁЃ
ComIPduSignalGroupRef:ЬсЙЉЖдДЫIPDUжаАќКЌЕФЫљгааХКХзщЕФв§гУ
ComIPduCallout:ДЫВЮЪ§ПЩЖЈвхЯргІI-PDUЕФcalloutКЏЪ§ЕФУћГЦ,ИУКЏЪ§дкНгЪеIPDUЪБЛђдкЗЂЫЭPDUжЎЧАЕїгУЁЃ
ComIPduDirection:ЖЈвхI-PDUЪЧЮЊЗЂЫЭ(SEND)PDUЛЙЪЧЮЊНгЪе(RECEIVE)PDUЁЃ
ComIPduSignalProcessing: гУгкХфжУаХКХЪЧСЂМДДІРэЛЙЪЧжмЦкадДІРэ,ЗжБ№ЖдгІimmediateЛђDEFERREDФЃЪНЁЃШчЙћНЋComIPduDirectionЩшжУЮЊSEND,дђашвЊЩшжУЦфЫћВЮЪ§,Р§ШчДЋЪфЪЧжмЦкЕФЛЙЪЧЛьКЯаЭЕФЕШЕШЁЃетЪЧЭЈЙ§ЬэМгComTxIPduЖдЯѓРДЬэМгЕФЁЃ
ComIpduGroups:ЫќАќКЌCOMФЃПщЕФIPDUзщЕФХфжУВЮЪ§ЁЃШчЙћВЛАќКЌComIPduGroupШнЦї,дђЮДЖЈвхIPDUзщЁЃдкетжжЧщПіЯТ,ЮоЗЈЭЈЙ§COMФЃПщНјааЭЈаХ
ComIPduGroupHandleId:гУзїДЫIPDUзщIDЕФЪ§жЕЁЃAPIЕїгУашвЊЫќРДЦєЖЏКЭЭЃжЙIPDUзщЁЃ
ComIPduGroupGroupRef:ЫќЬсЙЉЖдАќРЈИУIPDUзщЕФЫљгаIPDUзщЕФв§гУ
ComSignals : IPDUПЩвдгЩвЛИіЛђЖрИіаХКХзщГЩЁЃРДздRTEВЛЭЌгІгУГЬађЕФетаЉаХКХдкБЛДЋЪфЕНPduRжЎЧАБЛДђАќЕНPDUжаЁЃИУШнЦїЬсЙЉИїжжВЮЪ§РДХфжУPDUжаЕФаХКХЮЛЮЛжУ,аХКХЮЛДѓаЁКЭЦфЫћЪєадЁЃ
ComHandleId:етЪЧЗжХфИјУПИіаХКХIDЕФЪ§зжжЕЁЃгыаХКХВйзїгаЙиЕФВЛЭЌAPIЕїгУашвЊЫќЁЃ
ComTimeoutFactor:ЫќЖЈвхСЫМрЪгЕФГЌЪБЪБМфЁЃ
ComTransferProperty:вдЯТбЁЯюЖЈвхДЫаХКХЪЧЗёПЩвдДЅЗЂЯргІIPDUЕФДЋЪф;ПЩвдЩшжУвдЯТЮхИібЁЯюжЎвЛ:
TRIGGERED
PENDING
TRIGGERED_ON_CHANGE,
TRIGGERED_WITHOUT_REPETITION TRIGGERED_ON_CHANGE_WITHOUT_REPETITION
ComBitPosition:жИГіаХКХдкIPDUжаЕФПЊЪМЮЛжУ,
ComBitSize:ЫќЖЈвхаХКХЕФДѓаЁ(вдЮЛЮЊЕЅЮЛ)ЁЃ
ComSignalEndianess:ЖЈвхаХКХЭјТчБэЪОЕФзжНкХХађЁЃПЩвдЪЧBIG_ENDIAN,LITTLE_ENDIAN,OPAQUEЁЃ
ComSignalInitValue:гУгкЩшжУаХКХЕФГѕЪМжЕЁЃ
ComSignalLength:ЫќжИЖЈUINT8 [n]РраЭЕФn(вдзжНкЮЊЕЅЮЛ:1 ... 8)ЁЃЖдгкЦфЫћРраЭ,ЫќНЋБЛКіТдЁЃ
ComSignalType:ЫќжИЖЈЗћКЯBOOTEAN,SINT8,UINT8ЕШЁЃ
ComTimeoutNotification:ЖЈвхЗЂЩњГЌЪБЪБдкЗЂЫЭЗНЛђНгЪеЗНвЊЕїгУЕФКЏЪ§ЕФУћГЦ
ХфжУЭъComФЃПщ ,ЯТУцЪ§ОнОЭPduRФЃПщДІРэ:
PduR:ИКд№НЋPDUТЗгЩЕНЬиЖЈЕФзмЯпНгПкЁЃдкPduRжЎЩЯЕФЫљгаВужа,ЫљгаPDUЖМЪЧЖРСЂгкавщЕФЁЃдкPduRжЎЯТЕФЫљгаPDUЖМЪєгкЬиЖЈЕФавщНгПкФЃПщ
PduRBswModules:УПИіШнЦїЖМУшЪіСЫPDUТЗгЩЦїБиаыСЌНгЕФЬиЖЈBSWФЃПщ
CanIf
CamNm
CanTp
Com
Dcm
PduRGeneral :етЪЧPduRФЃПщЕФзгШнЦї,ЫќжИЖЈPDUТЗгЩЦїЕФГЃЙцХфжУВЮЪ§
PduRDevErrorDetect:ШчЙћЦєгУ,ЫќНЋФЌШЯДэЮѓИњзйЦї(Det)МьВтКЭЭЈжЊДђПЊЁЃ
PduRVersionInfoApi:ШчЙћЩшжУЮЊtrue,дђPduR_GetVersionInfo APIПЩгУ.
PduRRoutingTables: ЫќБэЪОТЗгЩТЗОЖБэЁЃДЫТЗгЩБэдЪаэЪЙгУЖрИіХфжУ,етаЉХфжУгУгкдкЭЌвЛХфжУжаДДНЈЖрИіТЗгЩБэ
PduRRontingTable
PduRRoutingPaths: ТЗгЩТЗОЖЮЊдД PDU(Source PDU)ЕНФПБъPDU(Destination PDU)ЕФУшЪі,ЫќУЧЖМаш вЊЭЈЙ§в§гУЧАЪіEcuCжаЖЈвхЕФШЋОжPDUРДНјааЙиСЊ
PduRзЊЗЂЪ§ОнЕНЯТУцЕФзгФЃПщ ,Р§ШчЕНCanIfФЃПщ
CanIf:ЪЧЗУЮЪCANзмЯпЕФБъзМНгПкЁЃГщЯѓCanПижЦЦї,ЬсЙЉЯђЩЯЕФНгПк,етбљЩЯВуОЭВЛгУЙиаФCanПижЦЦїЪЧЦЌЩЯзЪдДЛЙЪЧЦЌЭтЁЃ
ЙІФм:1.ЭъГЩЖдCanIfКЭПижЦЦїжаШЋОжБфСПМАХфжУЛКГхЧјЕФГѕЪМЛЏ;
2.ЗЂЫЭЧыЧѓЗўЮё,ЬсЙЉЙЉЩЯВугІгУдкCANЭјТчЩЯЗЂЫЭPDUЕФНгПк;
3.ЗЂЫЭШЗШЯЗўЮё,ЗЂЫЭГЩЙІКѓЭЈжЊЩЯВу,ЛђепЗЂЫЭШЁЯћШЗШЯКѓДцгк ЗЂЫЭЛКДц;
4.НгЪежИЪОЗўЮё,ГЩЙІНгЪеPDUКѓЭЈжЊЩЯВуЁЃ
5.CanIfжївЊХфжУHth(Hardware transmit handle)КЭ Hrh(Hardware receive handle),Hrh HthашвЊв§ШыCanHardwareObject,CanHardwareObjectЪЧЖдCANгЪЯф (MailBox,MB)ЕФГщЯѓ,дкКѓајMCALХфжУжаЛсНјааНВНт
6.УПИіPDUашвЊв§гУвЛИіHthЛђепHrh,МД ЭъГЩPDUЯђMBЕФЗжХфЁЃ
CanIfCtrlDrvCfg : ЫќЬсЙЉСЫЛљДЁCANЧ§ЖЏГЬађФЃПщЕФХфжУВЮЪ§ЁЃвЛИіCanIfDrvCfgв§гУвЛИіCan DriverФЃПщЁЃ
CanIfInitCfg : ЫќАќКЌCanIfЕФЫљгаГѕЪМЛЏВЮЪ§ЁЃДЫШнЦїжСЩйгавЛИіЪЕР§ЁЃЫќЖЈвхСЫЫљгагыPDUЯрЙиЕФХфжУ
CanIfBufferCfg:CanIfInitCfgЕФзгШнЦїЁЃДЫШнЦїАќКЌДЋЪфЛКГхЧјХфжУЁЃБиаыЮЊНЋгУгкДЋЪфжЁЕФУПИіCanControllerЬэМгДЫШнЦїЕФвЛИіЪЕР§
CanIfTxPduCfg : ЫќЪЧCanIfInitCfgЕФзгШнЦїЁЃЫќАќКЌЗЂЫЭCAN L-PDUЕФХфжУВЮЪ§ЁЃУПДЮашвЊЗЂЫЭCAN L-PDUЪБЖМвЊЖдЦфНјааХфжУ
CanIfФЃПщЗЂЫЭЪ§ОнЕНОпЬхЕФФГИіCanПижЦЦї
Can :MCALВужаЕФCanЧ§ЖЏ
CanGeneral : CanФЃПщећЬхЙІФмЕФХфжУ
Can Change Baudrate Api:ИФБфCANВЈЬиТЪAPIЪЙФмЁЃ
Development Error Detection:CanФЃПщПЊЗЂДэЮѓМьВтЪЙФмЁЃ
Can Driver Index:CANЧ§ЖЏIdКХЁЃ
Can Main Function Busoff Period: Can_Main Function_Bus OFF()КЏЪ§ЕїгУжмЦкЁЃ
Can MainFunction Wakeup Period: Can_MainFunction_Wakeup()КЏЪ§ЕїгУжмЦкЁЃ
Can Main Function Mode Period:Can_MainFunction_Mode()КЏ Ъ§ЕїгУжмЦкЁЃ
Can Multiplexed Transmission:ЫЋТЗИДгУЙІФмЕФДЋЪфЪЙФмЁЃ
Can Identical Id Cancellation:ШЁЯћЙвЦ№ЕФЗЂЫЭБЈЮФЪЙФмЁЃ
Can Extended Id Support:жЇГжРЉеЙIdЪЙФмЁЃ
Message buffer data size:CAN MailBoxзАдиЪ§ОнГЄЖШЕШЁЃ
CanConfigSet
CanController:CANПижЦЦїЪєадХфжУ :аОЦЌЩЯгаМИТЗCan ЪЙгУЕНМИТЗCan
Can Controller Activation:CANПижЦЦїЪЙФмЁЃ
Can Controller Id:CANПижЦЦїIdКХ
Can Rx Processing Type:НгЪеЪ§ОнЕФДІРэЗНЪН,ТжбЏ(POLLING)ЛђжаЖЯ(INTERRUPT)ЁЃ
Can Tx Processing Type:ЗЂЫЭЪ§ОнЕФДІРэЗНЪН,ТжбЏ(POLLING)ЛђжаЖЯ(INTERRUPT)ЁЃ
Can BusOff Processing Type:CAN BusOffЪТМўДІРэЗНЪН,ТжбЏ (POLLING)ЛђжаЖЯ(INTERRUPT)ЁЃ
Can Wakeup Processing Type:CAN WakeupЪТМўДІРэЗНЪН,ТжбЏ (POLLING)ЛђжаЖЯ(INTERRUPT)ЁЃ
Can Controller Default Baudrate:CANПижЦЦїФЌШЯЕФВЈЬиТЪХфжУЁЃ
Can CPU Reference Clock:CANФЃПщв§гУЕФЪБжг,МДMcuФЃПщжа ХфжУЕФMcuClockReferencePoint_CAN_CLKЁЃ
CanRxFifoWarningNotification:RxFifo WarningЭЈжЊКЏЪ§ЁЃ
CanRxFifoOverflowNotification:RxFifo OverflowЭЈжЊКЏЪ§ЁЃ
Can Error Notification Enable:Can ErrorЭЈжЊКЏЪ§ЕШ
CanControllerBaudrateConfig : CanControllerЕФВЈЬиТЪХфжУ
Can Time Segments Checking:CANЪБМфЖЮМьВтЪЙФмЁЃ
ЂкCan Automatic Time Segments Calculation:здЖЏЪБМфЖЮМЦЫуЪЙ Фм,ШєЪЙФм,дђCanControllerPropSegЁЂCanControllerSeg1ЁЂ CanControllerSeg2ЁЂCanControllerSyncJumpWidthНЋНћгУЁЃ
ЂлCan Controller Prescaller:CANПижЦЦїЪБжгЗжЦЕЁЃ
ЂмCan Controller BaudRate Config Id:CANПижЦЦїВЈЬиТЪХфжУId КХ,БЛSetBaudrate APIЪЙгУЁЃ
ЂнCan Controller BaudRate:ЩшжУCANПижЦЦїЕФВЈЬиТЪ,БОЮФЪОР§ ЪЙгУ100(Kbps)ЁЃ
ЂоCan Synchronization Segment:ЭЌВНЖЮЕФЪБМфЁЃ
ЂпCan Propagation Segment:ДЋВЅЖЮЕФЪБМфЁЃ
ЂрCan Phase Segment 1:ВЩбљЕуЧАЕФЪБМфЖЮЁЃ
ЂсCan Phase Segment 2:ВЩбљЕуКѓЕФЪБМфЖЮЁЃ
ЂтCan Resynch Jump Width:ЭЌВНЬјдОПэЖШ (Synchronization Jump Width),гУгкжиЭЌВНЕФЪБМфЁЃ
CanFilterMask:ТЫВЈЦїбкТы,
CanHardwareObject:ЮЊCAN MailBox(MB)ЕФГщЯѓ,MainBoxРДзіБЈЮФЕФЪеЗЂЁЃ вЛИіCanHardwareObjectМДвЛИіcanБЈЮФ
Can Implementation Type:FULL CAN(вЛИіMBжЛФмЗЂЫЭЛђепНг ЪевЛжЁCANБЈЮФ);BASIC CAN(вЛИіMBПЩвдЗЂЫЭЛђепНгЪеЖржЁCAN БЈЮФ)ЁЃ
ЂкCan Id Message Type:CAN IdЕФРраЭ,БъзМжЁ(Standard Identifier-11 bits)ЁЂРЉеЙжЁ(Extended Identifier-29 bits)гы ЛьКЯФЃЪН(Mixed Mode)ЁЃ
ЂлCanIdValue(Message Id):НсКЯCanFilterMask,ЖЈвхCANБЈЮФ НгЪеIdЗЖЮЇЁЃ
ЂмCan Object Id(MB Handle):MBЕФIdКХЁЃ
ЂнCan MB Type:MBРраЭ,НгЪе(RECEIVE)ЛђепЗЂЫЭ (TRANSMIT)ЁЃ
ЂоCan Controller Reference:CANПижЦЦїв§гУ,БОЪщЪОР§ЩцМАвЛИі CANПижЦЦїЁЃ
ЂпCan Filter Mask Reference:в§гУТЫВЈЦїбкТы3.ДцДЂ
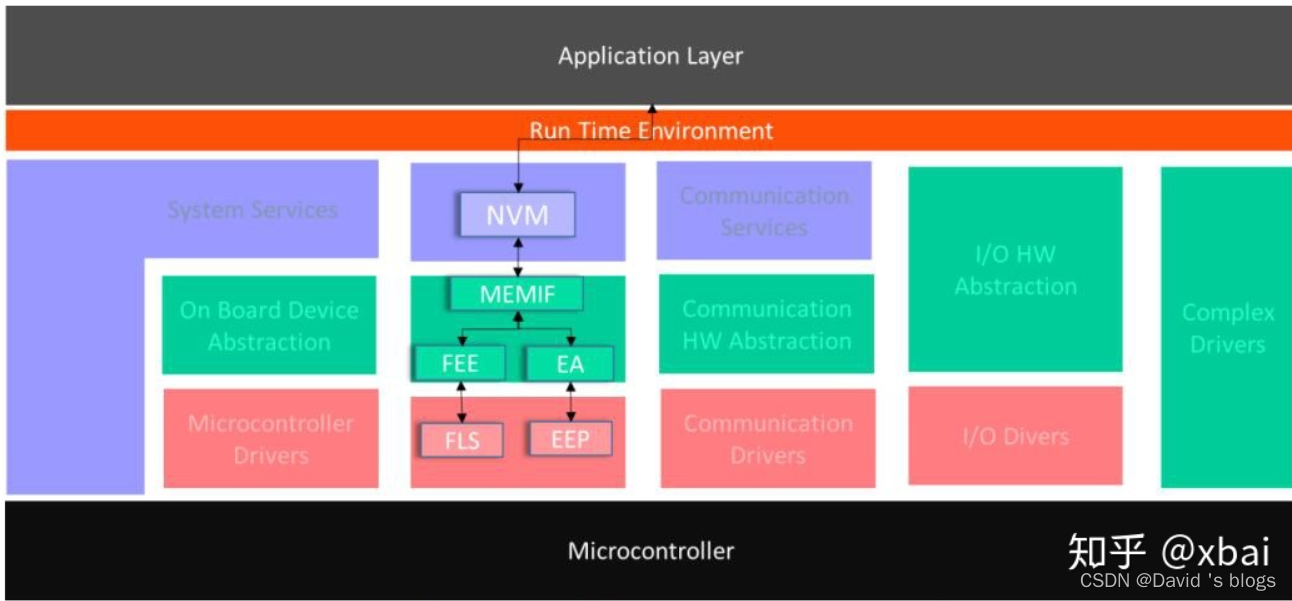
NVM:NVRAM Manager
MEMIF:Memory Abstraction Interface
FEE:Flash EEPROM Emulation
EA:EEPROMAbstraction
FLS:Flash Driver
EEP:EEPROM Driver
4.OS
ПЩвдРэНтЮЊЕЅЦЌЛњжаЕФSTM32CubeMXХфжУFreeRTOSЁЃ
Ventor DavinCi Configuration ProжаЕФOsХфжУШчЯТ:
OsAlarms
OsжаЕФЖЈЪБЦї
OsApplications OsгІгУ жЇГжЖрКЫаО
OsAppModes
OsBarriers
OsCores OsХфжУЖрКЫЛђепЕЅКЫ
OsCounters МЦЪ§Цї
OsEvents ЪТМў
Oslsrs жаЖЯ
OsResources
OsScheduleTables
OsSpinLocks Ыј
OsTasks ШЮЮёTask
OsOs
OsPublishedInformation
НщЩм:
Alarms:ОЏБЈЦї,ОЭЯёЮвУЧЕФЩЯПЮСхЩљ,ЕНЪБМфОЭЛсЯьЁЃВйзїЯЕЭГгУЫќРДзівЛаЉЖЈЪБЕФЪТ,БШШчМЄЛювЛИіШЮЮёTaskЁЃ
Applications:ДгзжУцвтЫМРэНт,ЫќЪЧвЛИігІгУ,зМШЗЕиЫЕ,ЫќгІИУЪЧвЛИіЗжЧјЁЃЫќВПЪ№ЕНФГИіCoreЩЯ,жївЊЕФзїгУОЭЪЧЙмРэЗХЕНЦфжаЕФЖдЯѓЁЃЮЊЪВУДвЊетИіЖЋЮїФи?ОйИіВЛЧЁЕБЕФР§згЁЃMCUЯёвЛИіЙњМв,КЫОЭЪЧЫќЕФЪЁ,ФЧУДApplicationsОЭПЩвдРэНтГЩЪЁЙмЯНЯТЕФЕиМЖЪаЁЃБШШч,ФГвЛЬьвЛИіЕиМЖЪаРяЗЂЯжСЫДѓСПаТЙкВЁЖОИаШОеп,ЮЊСЫЗРжЙРЉЩЂ,НЋИУЪаЗтБеДІРэ,вдУтРЉеХЕНЦфЫћЪаЧјЁЃЯыЯыПД,ЕБетИіЪаРяГіЯжвпЧщЪБ,ЪЧЗтБеећИіЪЁКУФи,ЛЙЪЧНіЗтБеИУЪаКУФи?ЯдШЛЪЧКѓепЁЃаОЦЌРяЕФЛЎЧјвВЪЧЗЧГЃКЯРэЕФЁЃAUTOSAR OSжаЗжЧјЗжЮЊПЩаХЕФКЭЗЧПЩаХЕФЁЃ
Application modes:гУЕФМЋЩй,етРяВЛеЙПЊНщЩм;
Counters:АбCounterБШзїаФдрБШНЯКЯЪЪ,ЖдгкаОЦЌРДЫЕ,ЫќОЭЪЧОЇеёЁЃдкВйзїЯЕЭГЫќЕФзїгУОЭЪЧМЦЪБЛђепМЦЪ§,вЛАуCounterгыаОЦЌЕФTimerНсКЯЦ№РД,CounterЕФОЋЖШОіЖЈСЫВйзїЯЕЭГФмМЦЪБЕФзМШЗЖШЁЃ
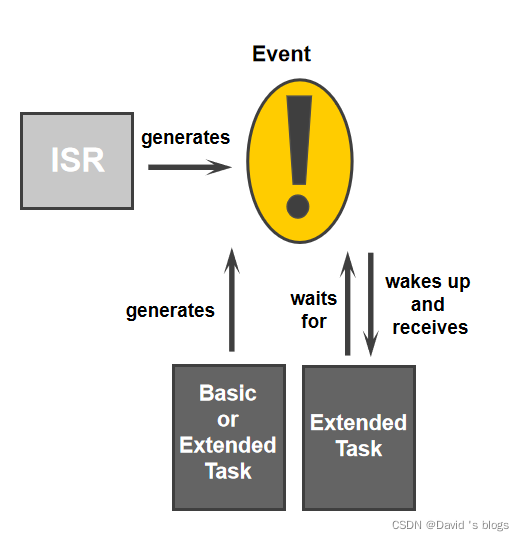
Events:ЪТМўЁЃдкЧЖШыЪНВйзїЯЕЭГжа,ЪТМўвЛАуЪЧКЭШЮЮёАѓЖЈвЛЦ№РДЪЕЯжЕїЖШЙІФмЕФ,ЕБШЛвВПЩвдгЩAlarmsРДДЅЗЂЁЃБШШч,ЮвЭЈЙ§ЩшЖЈФГИіШЮЮёдк10msНјГЬжДаа,10msЕФШЮЮёОЭКЭИУЪТМўвЛЦ№РДЪЕЯжЁЃ
ISRs:interrupt service routine,ОЭЪЧЮвУЧНВЕФжаЖЯЁЃжаЖЯЕФИХФюЖдгкЧЖШыЪНПЊЗЂЕФЭЌбЇЖјбд,гІИУЖМБШНЯЪьЯЄЁЃдкAUTOSAR OSжажаЖЯгаСНжжРраЭ,Autosar OSжаНЋжаЖЯЗжЮЊCat1 КЭCat2,МДЫљЮНЕФ1РржаЖЯКЭ2РржаЖЯ,ЫљЮНЕФ2РржаЖЯЦфЪЕОЭЪЧЭъШЋБЛOSНгЙмЕФжаЖЯ,етРржаЖЯЕФЩЯЯТЮФЧаЛЛ,ЖбеЛЙмРэШЋВПгЩOSЙмРэ;Жј1РржаЖЯдђВЛБЛOSНгЙм,вђДЫЫќЕФЩЯЯТЮФгЩздМКЙмРэЁЃСэЭтAutosar OsжавЊЧѓCat1ЕФжаЖЯЕФзюЕЭгХЯШМЖИпгкCat2ЕФзюИпгХЯШМЖ,вВОЭЪЧЫЕCat1ЕФжаЖЯгХЯШМЖИќИпЁЃЫљвдCat1ЕФжаЖЯвЛАугУгкЪБМфвЊЧѓИќНєМБЕФГЁКЯЁЃвЊжЊЕР,жаЖЯгаБШШЮКЮШЮЮёЖМИпЕФгХЯШМЖ,МДжаЖЯПЩвдЧРеМШЮЮёЁЃ
Register Sets:МИКѕУЛгаЪЙгУ,днЪБВЛНщЩмЁЃ
Resources:зЪдДЁЃЧЖШыЪНЯЕЭГФкВПЕФзЪдДЪЧгУРДЧПжЦШЮЮёЗжзщдЫааЕФ,дкЗжзщФкВП,ЪЧУЛгаЧРеМвЛЫЕЕФ,МДЙВЯэзЪдДЁЃЕБШЛ,жаЖЯОЭВЛФмЪЙгУФкВПЗжзщзЪдДСЫЁЃЙВЯэЪВУДзЪдДФи?БШШчеЛЕФЙВгУ,ЮЊСЫНЕЕЭЯЕЭГЕФИККЩ,ЮвУЧПЩвдШУЭЌЗжзщЕФШЮЮёЙВгУЗжХфЕФеЛзЪдД,ФугУЭъЮвгУ,ЯёКЭаГЩчЛсвЛАуЁЃ
Schedule tables:ЕїЖШБэ,ПЩвдНЋЦфРэНтЮЊАќКЌСЫКмЖрЕїЖШЕуЕФБэ,Autosar OsжавЛАуетУДгУЕїЖШБэ,БШШчга 1ms,2ms,5ms Ш§ИіжмЦкашвЊЕїЖШЕФШЮЮё,ФЧУДЛсИљОнЙЋдМЪ§,ЩњГЩвЛИіБэ,етИіБэдк1ms ДІЕїЖШ1msШЮЮё,2msДІЕїЖШ1msКЭ2msШЮЮё,4msДІЕїЖШ1msКЭ2msШЮЮё,5msДІЕїЖШ1msКЭ5msШЮЮё,10msДІЕїЖШ1ms,2ms,5msШЮЮё,ШЛКѓАДееетбљЕФЙиЯЕбЛЗ,етОЭЪЧЫљЮНЕФЕїЖШБэЁЃФПЧАгаВПЗжжїСїЕФAutosarПЊЗЂЩЬЪЙгУетжжЗНЪННјааШЮЮёЕФЕїЖШЁЃЕШЛ,Schedule TableгаздМКЕФзДЬЌЛњ,Schedule TableЕїЖШЗНЪНзюДѓЕФКУДІдкгкБЃГжЕїЖШЕФЭЌВНадЁЃ
Spinlocks:УЛгаЯюФПЪЙгУ,днВЛНщЩмЁЃ
Tasks:ШЮЮёгІИУвВБШМлЪьЯЄ,Autosar OsгааЉздМКЕФаджЪ,МђЕЅНщЩмЯТЁЃTask РраЭ:
Basic Task:АќКЌзДЬЌReady,Running,Suspend
Extend Task:АќКЌзДЬЌReady,Running,SuspendКЭWaiting
ЫљЮНЕФРЉеЙtask,ОЭЪЧЖрСЫвЛИіWaitingзДЬЌ,вђДЫЫќвЛАуОЭЪЧЕШД§вЛИіEventЕФЕНРДЁЃ
ДЫЭтTaskЕФЕїЖШЗжЮЊЧРеМЪНКЭазїЪН,ЖдгкПЩЧРеМЕФTask,OSЛсИљОнTaskЕФгХЯШМЖНјааХХађЕїЖШ,гХЯШМЖИпЕФПЩвдЧРеМгХЯШМЖЕЭЕФЁЃдкAUTOSAT OSжаЪ§зждНДѓгХЯШМЖдНИпЁЃ
5.ИДдгЧ§ЖЏ
етИіКУРэНт,ЯрЕБгквЛаЉИДдгЕФЧ§ЖЏВЛФмЪЪХфЕНAutosarМмЙЙжа,ФЧОЭжБНгСЌНгЩЯВуRTEКЭЯТВуMCAL
ЮхЁЂRTE
RTEЪЧЮЊЩЯВугІгУШэМўЬсЙЉЭЈаХЗўЮёЕФВуЁЃ дкRTEжЎЩЯ,ШэМўМмЙЙЗчИёДгЁАlayerЁББфЮЊЁАcomponentЁБ. RTEЗтзАКУСЫЯТВуШчOESKЁЂCOMЕШЭЈаХВуBSWКѓ,ЮЊЩЯВуЬсЙЉЪ§ОнЭЈаХЫљашЕФRTE API,дйЪЙгУЖЫПкЛђепSender-ReceiverЭЈаХКЭClient-ServerЭЈаХЕФЗНЪННјааНЛЛЅЁЃ
ЫќЕФзїгУЪЧЖдЩЯВувўВиbswВуЕФЯИНк,ЪЙЩЯВуЕФswcЕФЪЕЯжВЛБивРРЕгкФГИіЬиЖЈЕФecuЁЃ
СљЁЂSWC
Тд
ЦпЁЂПЊЗЂЙЄОп
1.РЭЬиАЭКе (Lauterbach ):
гУРДЕїЪд
2.vector DaVinci Developer ?
ЩшМЦSWCЕФЭМаЮНчУцЙЄОп
3.vector DaVinci Configurator Pro
ХфжУBSWКЭMCALЕШ;ЪфГіRTEЁЂBSWДњТыЁЃ
4.ETAS
5. EB Tresos :
ХфжУMCAL КЭ BWSФЃПщЁЃКЭventorОКељЙиЯЕ,ЫћСЉФмзівЛбљЕФЪТЁЃ
6.CANoe
7.MATLAB/Simulink:
SimulinkЪЧMatlabзюживЊЕФзщМўжЎвЛ,ЫќЬсЙЉСЫвЛИіЖЏЬЌЯЕЭГНЈФЃЁЂЗТецКЭзлКЯЗжЮіЕФМЏГЩЛЗОГЁЃдкИУЛЗОГжа,ЮоаыДѓСПБраДГЬађ,жЛашвЊЭЈЙ§МђЕЅжБЙлЕФЪѓБъВйзїОЭПЩвдЙЙдьГіИДдгЕФЯЕЭГ
АЫЁЂВЮПМбЇЯАзЪСЯ
ЗжВуМмЙЙ:
Classic AutoSAR МђНщ-дЦЩчЧј-ЛЊЮЊдЦ (huaweicloud.com)
бЇЯАЪщМЎ:
ЁЖAUTOSARЙцЗЖгыГЕгУПижЦЦїШэМўПЊЗЂ.pdfЁЗ етИіБОЪщЪЧбЇЯАautosarШыУХЪщМЎ,НВЕФЭЈЫзвзЖЎЁЃЮвЕФзЪдДжагаЩЯДЋ:AUTOSARЙцЗЖгыГЕгУПижЦЦїШэМўПЊЗЂ.rar_autosarЙцЗЖгыГЕгУПижЦЦїШэМўПЊЗЂ-ЦфЫќЮФЕЕРрзЪдД-CSDNЮФПт
ГЇЩЬЕФХрбЕзЪСЯ:vectorМвЕФ EBМвЕФ ЭјЩЯЖМФмЫбЕН
ЮвЕФзЪдДжагаЩЯДЋ:??????EB_AUTOSARЛљДЁХрбЕEB_AUTOSAR_Basic_Training_Slides_v2018.rar_ebautosar-ЧЖШыЪНЮФЕЕРрзЪдД-CSDNЮФПт
ОХЁЂИаЯызмНс
аДвЛВЈИаЯыАЩ,бЇЯАautosarМИИідТСЫ,ОЭгаЛњЛсЕНШЋЧђзюДѓЕчГиЙЉгІЩЬВЮгыautosarМмЙЙЕФBMSЯЕЭГХфжУгывЦжВЁЃгУЕНСЫvector-DaVinci Configurator ProХфжУСЫBSWЕФЖрИіФЃПщ,гУEB-TresosХфжУСЫMCALВуЁЃ
ЪЎЁЂЯюФПОбщ
1.ЯюФПМђЪі
ЛљгкAutoSarМмЙЙЕФBSMвЦжВгыЕїЪд
2.ПЊЗЂЛЗОГ
EB-Tresos :ХфжУMCAL
Ventor DavinCi Configuration Pro : ХфжУBSW ,ЩњГЩДњТы
BuildЙЄОп
3.MCALХфжУ
Тд
4.BSWХфжУ
ЯюФПвЦжВ:гЂЗЩСшФГаОЦЌ -> ФГЙњВњаОЦЌ
вЦжВСїГЬ:ЯШХфжУBSWИїФЃПщ(ЙЄОп:Ventor Davinci Configurator Pro);КѓаоИФБрвыТЗОЖЮФМўЁЂcЮФМўЁЂвдМАБрвыВњЩњЕФБЈДэ(ЭЗЮФМўШБЩй ЛђепЮДЖЈвхКЏЪ§КЭБфСП)
вЛЁЂCodeвЦжВ :(ЗХЕНзюКѓзі)
1.ИїРрПтЮФМўЕФИФЖЏ:ЬцЛЛаОЦЌЕФMcalПт SDKПтЕШ
2.inclide.txt ДЫЮФМўДцЗХБрвыЫљашвЊЕФЭЗЮФМўТЗОЖ(ашвЊЩОГ§TC275ЕФТЗОЖ аТдіG9EЕФТЗОЖ) ;
build.txtЮФМўЕФаоИФ(ДЫЮФМўЯТДцЗХИїИіФЃПщcЮФМў) ашвЊаТді ЩОГ§
3.Ч§ЖЏЮФМўаоИФ:CDDИДдгЧ§ЖЏ
4.MCALЙЄГЬвЦжВ:EBХфжУЕФMcalЙЄГЬ
ЖўЁЂBSWФЃПщаоИФ-CanХфжУ : DavinciЙЄОпФПЧАВЛжЇГжG9EаОЦЌЕФCanЕзВуЧ§ЖЏ(етвЛЕуРрЫЦKeilЙЄГЬЛђепstm32CubeMXЙЄГЬаТНЈЪБбЁдёаОЦЌаЭКХ,G9EЪЧаТВњЦЗ,ФПЧАВЛжЇГжЁЃ)
ЫљвдЕзВуЧ§ЖЏашвЊдкEB-TresosжаХфжУ
АбMCALЕФCanЕзВуХфжУКЭDavinciжаЕФCanIfвдМАЩЯВуХфжУЯЮНг
1.EB->MCAL->cam->CanHardwareObjectжаЕФХфжУад КЭ Davinci Configurator -> CanЕФHardwareObjectХфжУвЛжТ
Ш§ЁЂBSWФЃПщХфжУ:NVM Ea/EepФЃПщХфжУ :G9EФкВПУЛгаFlashВЛФмЪЙгУFlsЁЂFeeзіnvmДцДЂ ,ЫљвдгУЭтВПEepromРДзіNVMДцДЂ
1.бЁдёЬэМгФЃПщ:ЬэМгbswФЃПщЕНBasic_EditorНчУцЯТ
Project->Project_Settings->Modules->[Add] -> Select from software integration package ->next -> eepЁЂ ea -> finish
ШЛКѓдйBasic_EditorНчУцОЭПЩвдПДЕНЬэМгЕФФЃПщСЫ
2.ХфжУEepФЃПщЪєад:EepGeneral : Block Size : 256
3.ХфжУEepInitConfigurationЪєад:
EepаОЦЌаЭКХ25LC512,ИљОнаОЦЌНјааЖСаДХфжУ
Default Mode : MEMIF_MODE_FAST
Device Information Ref : бЁдёаОЦЌMicrochip_25LC512
Fast Read Block Size : 128
Fast Write Block Size : 128
Normal Read Block Size : 128
Normal Write Block Size : 128
Size : 65536
(...ЦфЫћХфжУОЭВЛвЛвЛУшЪіСЫ)
4.дкEepжаЬэМгDemФЃПщ
ХфжУEepЕФDem Parameter,ШЛКѓЩшжУММЪѕЗНЪН ,ашвЊХфжУ4ИіDem : Eep_E_READ_FAILEDЕШ
Dem -> DemConfitSet -> DevEventParameters -> Create DemEventParemeters Container (ЬэМгСЫвЛИіеяЖЯЪТМўВЮЪ§) -> ХфжУетИіВЮЪ§ЯТЕФИїИіЪєад
Short name: Eep_E_READ_FAILEDЕШ
Event kind: DEM_EVENT_LIND_BSW
ХфжУДЅЗЂЬѕМў:
Eep_E_READ_FAILED -> DemEventClass -> DemDebounceAlgorithmClass -> DemDebounceCounterBased :
OperationCycle Ref:IgnitionCycle
ШЛКѓЛиЕНEepФЃПщАбХфжУЕФDemАДееУћзжНјааMapping
EEp ->EepInitConfiguration -> EepDemEventParamterRefs :
E READ FAILED :бЁдёИеВХдкDemФЊПфЬэМгЕФEEP_E_READ_FAILED
5.EepЪЙгУSpiЭЈаХ,ЫљвдХфжУSpiФЃПщ
Spi -> SpiDrivers_0 -> Create SpiChannel Container : ХфжУshort name ЁЂchannel ID ЁЂMax Length ЁЂ Transfer Strat
6.ХфжУЩЯВуЕФEaФЃПщ : External Abstraction(ЭтВПДцДЂ)
вђЮЊгУЙ§NVM,ЫљвдашвЊЙиСЊСНИіNVMЕФNotification : NVM_JobEndNotification ЁЂNVM_JobErrorNotification
Basic_Editor -> Ea -> EaGenenal : ХфжУЩЯЪіСНИіЪєадЕФжЕ
аТдіСНИіPartitionгУРДДцДЂEolDataКЭEbIData,ХфжУЭъГЩКѓвЛЙВгаШ§Иі:EaPartitionConfiguration_App EaPartitionConfiguration_EolDataЁЂ EaPartitionConfiguration_FblData
Basic_Editor -> Ea -> EaPartitionConfiguration -> гвМќ -> Create ... Container
ХфжУУПИіаТдіPartitionЩшжУаТдіЕФЪєад:
Partition Device:
Partition Size : 61440
Partition Start Address : 0
ХфжУУПИіNVMЕФДцДЂBlock:ашвЊКЭжЎЧАFeeФЃПщжаЕФBlockБЃГжвЛжТ
Ea -> EaBlockConfiguration -> гвМќ -> Create EaBlockConfiguration Container
ЩшжУЪєад:
short name:
Block Size :
Device Index : бЁдёAPP Лђеп Eol Лђеп Fbl
...ЦфгрТд
7.ХфжУNVM КЭ MEMIf :ДгFls/FeeЛЛЕНСЫEa/Eep ,ЫљвдNVM ЁЂMemory InterfaceетСНВуашвЊбЁдёДгFeeGeneralЛЛЕНEaGeneral
MemIf -> MemIfMemHwAs -> -> Reference to Fee/Ea -> бЁдёEaGeneral
NVM -> NvmBlockDescriptors -> ASWC_NvmBlockNeed1 -> NvmTargetBlockReference -> гвМќ -> choose - NvmEaRef ; ШЛКѓжиаТMappingЖдгІEaЕФХфжУ
змНс:(1)ЯШХфжУзмЬхAutoSarНсЙЙШБЪЇЕФ:ШБФЃПщЕФЯШЬэМг, ШБDemЕФВЮЪ§ОЭВЙГфЩЯ;
(2)ШЛКѓИїbswФЃПщДгЯТЭљЩЯХфжУ:spi -> eep - ea -> nvm ЁЃ
ЫФЁЂХфжУOs : OsЫЋКЫдЫаа ХфжУOs ЕЅКЫдЫаа
1.Os ConfigurationНчУц (КЭBasic_EditorЭЌвЛМЖБ№НчУц) : ВщПДOS TaskЕШЕФЗжХфЧщПі
2.TaskЕФжиаТЗжХф: гаЕФtaskдкCore0КЫаФЯТдЫаа гаЕФtaskдкCore1ЯТдЫаа ашвЊжиаТЗжХф НЋCore1ЕФTaskвЦжВЕНcore0ЯТ
гаСНРрcase :case1 case2
3.case1ЕФtaskДІРэ:дЫаажмЦкВЛЯрЭЌ :етРрЕФtaskжБНгвЦжВЕНcore0
Basic_Editor -> Os -> OsApplication -> OsApp_QM_Core_1 -> App Task Ref :
ВщПДcore1ЯТЕФtask
евЕНашвЊЩОГ§ЕФtask : xxx_task_core_1 ЕуЛїXЩОЕє
ЩЯЪіВНжшШЅcore0ЯТЕФЬэМгTask
OsConfigurationНчУцЯТевЕНИеВХcore0аТдіЕФtask аоИФУћзж
OsConfiguration->OsApplications -> Tasks-> xxx_task_core_1 :
short name : аоИФЮЊ xxx_task_core_0
ПЩвддкИУХфжУНчУцПДЕНЖрИіtaskЕФЪєад:Task Priority ЁЂTask Schedule ЁЂTask Stack Size ЕШЕШЕШЕШ...
4.case2ЕФtaskДІРэ :жмЦкЯрЭЌЕФtask :ашвЊАбcore1жаЕФtaskЯТУцЕФMapped FunctionжиаТгГЩфЕНCore0
Mapped FunctionsЪЧЗёДцдкTriggered Function,ВЛДцдкОЭжБНгЩОГ§МДПЩ
ДцдкTriggered Function ,ашвЊжиаТmap,АбашвЊжиаТmapЕФКЏЪ§жиаТгГЩфЕНЖдгІЕФtaskЯТ ,дйАДееcase1ЕФЗНЪНДІРэtask
Р§Шч:core0 core1ЯТЖМгаЭЌбљжмЦкЕФtask :xxx_task_100ms ,АбtaskЯТУцЕФtriggered FunctionsЗРЕНвЛИіtaskЯТУц
Idle TaskВЛашвЊжиаТвЦжВ,ЩОГ§core1жаЕФ
5.Core1жаЕФIsr ашвЊЩОГ§ЕФ ашвЊжиаТгГЩфЕНCore0ЯТЕФ зіДІРэ
6.вЦжВcore1жаЕФAlarmЕНCore0ЩЯ ,жиаТгГЩфЯТ
Os Configuration -> Os Application -> OsCore_Coer1.OsApp -> Alarms -> Alarm Counter Ref :delete ЁЂedit (editжЎКѓЛсгаФЌШЯжЕаДЩЯШЅ)
Basic_Editor ->Os -> OSApplication -> OsAPP_QM_Core1 -> APP Alarm Ref :XЕє,дйШЅOsAPP_QM_Core0жаЬэМг
7.OsConfiguration -> Os Cores : ЩОЕєЦфЫћcore
8.Core0ЕФtask жиаТбЁдёTaskAccessingApplication ,ЕуНтdeleteздЖЏбЁдёЮЊCore0
9.RtmФЃПщжаЙиБеMulticore Support
10.EcucФЃПщжаЩОГ§Core1ЕФХфжУ
11.EcumжаЙиБеSlave Core HandingбЁЯю
12.OsжаХфжУHardware Init CoreжиаТбЁдёCore0 ;System TimerжиаТбЁдёSystem_Timer_Core0
13.CanФЃПщжажиаТбЁдёCounter Ref
Basic_Editor -> Can -> CanGeneral -> Counter Ref:ЕуЛїАДХЅбЁдёSystemTimer_Core0
14.XcpФЃПщЩОГ§ЖрКЫЕФХфжУ(БъЖЈФЃПщ : гУРДБъЖЈКЭВтСП,ЗДРЁБфСПжЕЙЉИјЩЯЮЛЛњВщПД,ШчзЊЫй)
Basic_Editor -> Xcp -> XcpConfig -> XcpCoreConfig -> XcpCore1 :delete
Basic_Editor -> Xcp -> XcpConfig ->XcpEventChannels -> Event Channel Core Ref : ШЋбЁ delete ;edit Xcp_Core0
15. МьВщДэЮѓЯю valid
checkИїИіФЃПщ : ЕузДЬЌРИЁЬАДХЅ ,ЕуЛї[validate]АДХЅНјааМьВщФЃПщ
16.Core0жагУЕНЕФЭтЩшжаЖЯНјааХфжУ
OsConfiguration -> OS Application -> Interrupt Service Routines -> add : ЬэМгвЛИіЭтЩшжаЖЯ
ЬэМгЭтЩшжаЖЯХфжУЪєад:
Short Name: ADC_GROUP0
Isr Interrupt Priority : 40
Isr Interrupt Source : 140
Isr Special Function Name : adc_callback
Isr Stack Size[Byte]: 2048
(...ЪЁТд...)
ЮхЁЂ generateДњТы
МьВщИїИіФЃПщЯТЪЧЗёЛЙгаДэЮѓ ,НтОівЛаЉБЈДэ, АДееvalidateЯТЕФЬсЪОНтОіДэЮѓЁЃ
MCALОВЬЌПт:MCAL_Static_G9 : adc.c pwd.cЕШЭтЩшЕФПтКЏЪ§
MCALЖЏЬЌХфжУЮФМўMcalConfig: adc_bswd.arxml ИїжжarxmlЮФМў ,ЪЧDavinciХфжУЭъКѓБЃДцЕФХфжУаХЯЂЮФМў
ЭЌФПТМЯТMicroSarConfig : DavinciЩњГЩЕФbswВуИїФЃПщЕФДњТы .c .hдкДЫЮФМўМаЯТ
SDKАќ:G9_SDK
СљЁЂБрвыДњТы
НтОіБрвыВњЩњЕФБЈДэ:ЭЗЮФМў ТЗОЖ БфСПУћ КъПЊЙиЕШЕФШБЪЇ.....5.змНс
? ? ? ?ЭъГЩвЛИіЯюФПЕФХфжУећИіЙ§ГЬашвЊвЛЬьзѓгв,ашвЊКмЯИаФКмФЭаФЕУгУDaVinciЙЄОпХфжУBSWжаЕФИїИіФЃПщ,ашвЊЖдautosarМмЙЙжаИїВуИїИіФЃПщСЫНт,жЊЕРУПИіФЃПщЕФзїгУ,УПИіФЃПщЯТЕФВЮЪ§ЁЂЪєадЕШЕШЁЃЁЃЁЃХфжУКѓашвЊФЭаФЯИаФНтОіИїРрБЈДэ...
6.бЇЯАНзЖЮ
(1)ШыУХНзЖЮ : СЫНтЛљБОПђМм
?ПДвЛБпЪщЁЂПДвЛБщPPT,СЫНтПђМм,СЫНтИїИіФЃПщзїгУ
(2)НјНзНзЖЮ:бЁдёФГИіСьгђЧаШы
ШчЙћбЁдёBSW:ХфжУBSWФЃПщ:вдЯТЪЕЯжЗНЪНИуЖЎ
BSWЕФIOЪЕЯж
BSWЕФЭЈаХЪЕЯж
BSWЕФДцДЂЪЕЯж
BSWЕФФЃЪНЙмРэ
BSWЕФПДУХЙЗЪЕЯж
BSWЕФеяЖЯЯЕЭГЪЕЯж
BSWЕФВйзїЯЕЭГЪЕЯж
(3)ИпНзНзЖЮ :ЪЕМЪЕФЯюФПДњТыЪРНч
ИуЖЎДњТыШчКЮВуВуЗтзА,ВуВуЕїгУЕФ?;УПИіcЮФМўЕФзїгУ,УПИіКЏЪ§ЕФзїгУ,УПааДњТыЕФзїгУЖМФмИуЖЎЁЃ? ? ? ?