1 ESP32�ϵ�PWM��Դ
ESP32�����ṩ������PWM���,�ֱ���
1.1 LED PWM ������ (LEDC)
ESP32���ṩ���16· LEDC��PWM���,����8·Ϊ����PWM,8·Ϊ����PWM,���ߵ���ͨ�����ֱ���4����Ӧ����/����ʱ����
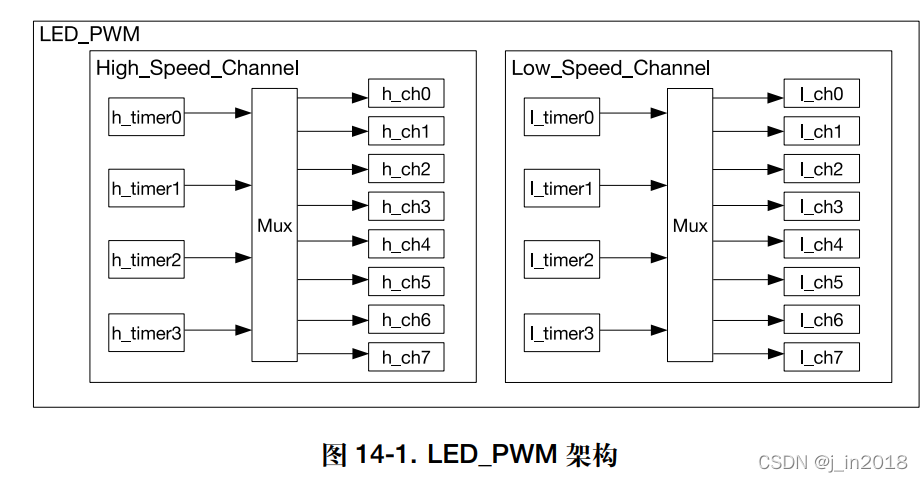
��PWM�����Ҫ���LED������(��ʵ��Ӧ���в�����)������������Ϊ��Ԥ����������������ռ�ձ��Ȳ���,��������ռ�ô�������Դ�������,ʵ�ֶ�����(��ֵ)����ɫ(Ƶ��)�ĵ��ء�
1.2 ����������������� (MCPWM)
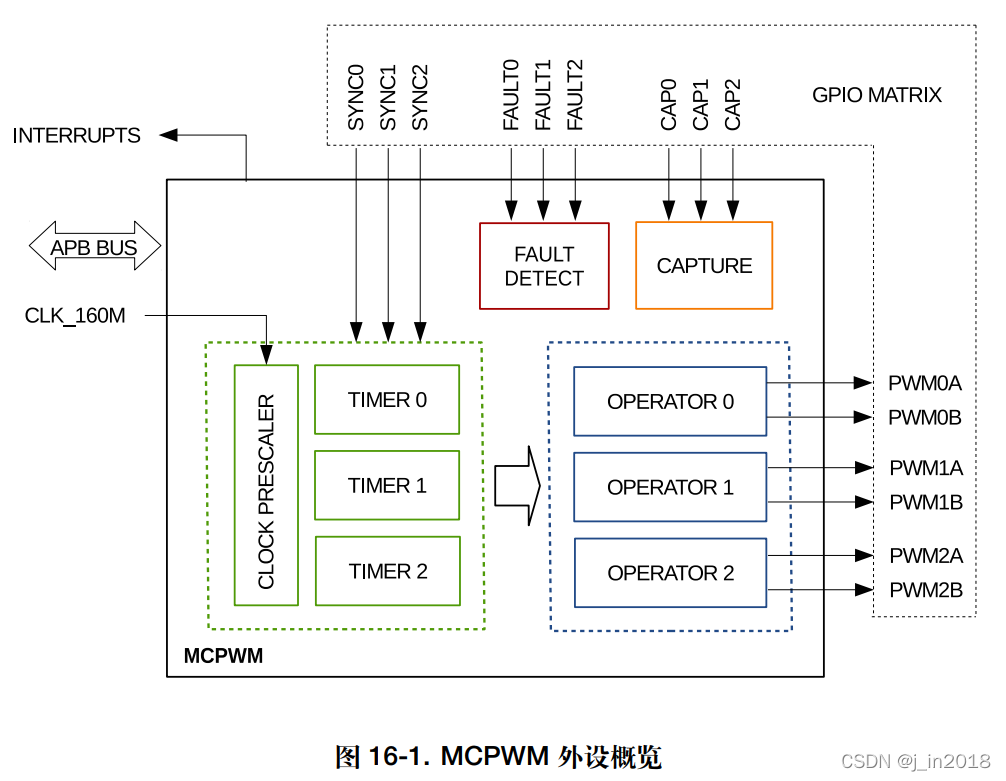
ESP32�ṩ6����PWM���,��������MCPWM����,ÿ����������ṩ3��PWMͨ����
��PWM���������ǰ���������Ĺ���,������PWM���εĿ��������û��LEDC�ľ�ϸ��
�ṹ����ͼ��ʾ,���Կ������˷�Ƶ������ʱ�����Ͳ�������,��������������,ר�ò���ģ��(���粶����ת�ٵ�)
2 ESP32-Arduinoʹ��PWM��Դ
����,������������Դ��������ESP32-Arduino���ṩ֧��,��LEDC�ṩ֧��(��ѯ֧�ֵ�����)��
�������������Ҫ������LEDC�С����ο���һƪblogESP32+Arduino+VS code���������+BLINK,��ȷʵ��ҪMCPWM,���Կ����ڳ����е���ESP-IDF���ȥʹ��,��Ӧ���ǿ��ܵġ�
2.1 LEDC��Ƶ���������
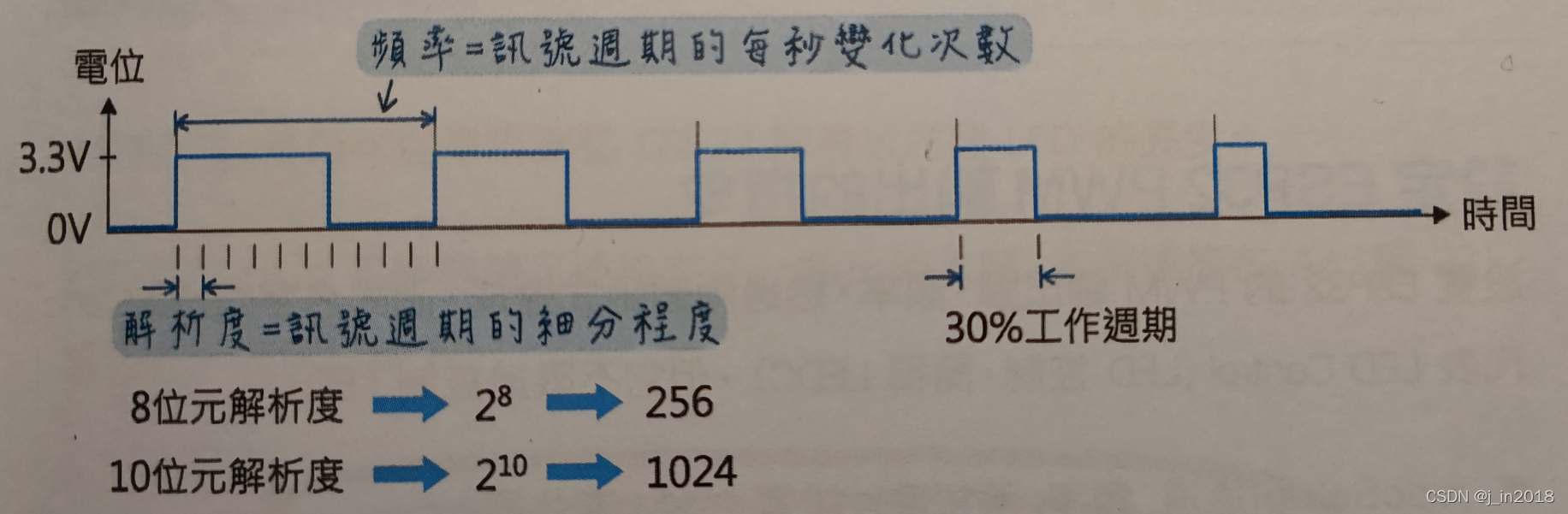
��Arduino Uno���8λ�̶�PWM�����Ȳ�ͬ,ESP32��PWM�������Ƕ�̬��,���趨��ء�
������:�����PWM�������,��ʱ�����ɢ������,��Ӧ�Ľ��,���ǵ�Ƶ��,�ı�ռ�ձ��Ըı��Ч��ֵ��Ӧ����,��õ�����ϸ�ĵ�Ч��ѹ���������,����UNO,8λ�Ľ�����,����С�ı仯��ѹ��1/256*3.3V=0.01289V,������10λ�Ľ�����,��Ϊ0.0032V��
����ESP32��LEDC���,����߽����ȿ��Ը�����ʽ���㲢����ȡ��,����ԭ��ɲ�����һ�ڵĽ�����
[
l
o
g
2
(
80
M
H
z
P
W
M
��
��
Ƶ
��
)
]
f
l
o
o
r
[log_2(\frac{80MHz}{PWM���Ƶ��})]_{floor}
[log2?(PWM����Ƶ��80MHz?)]floor?
2.2 LEDC�Ľṹ
����һ·����ʱ��+����ͨ���Ľṹ������ʾ,���������һ·��PWM���β����Ĺ��̽��н��͡�
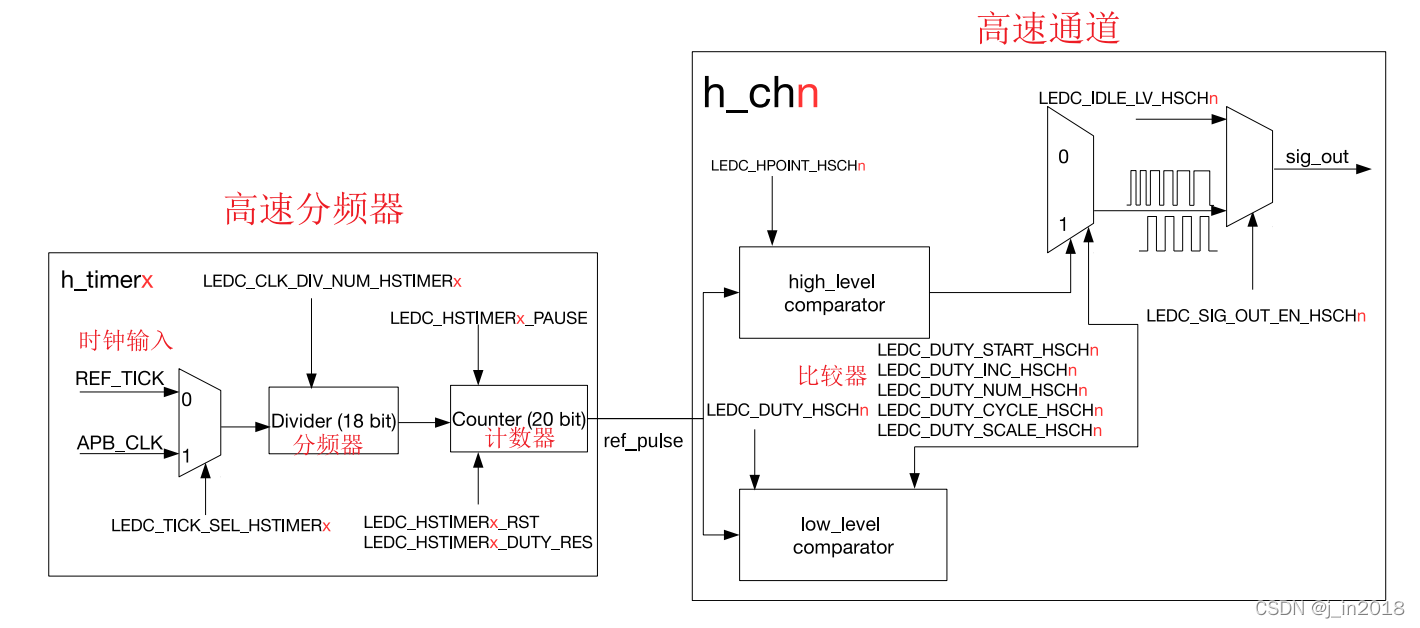
- ʱ������
�ڸ��ٷ�Ƶ����,����ѡ��REF_TICK��APB_CLK,REF_TICK��APB_CLK������Ƶ���ٵõ���,���С��APB_CLK��
Ĭ�������(������CPU��ʱ�ӽ�����),APB_CLK=80MHz��
һ����˵,CPU�ڵ���ʱ,�����RTC8M_CLKʱ�ӹ���,LEDC�ĵ���ͨ�����Բ���REF_TICK��SLOW_CLOCK���й���,��SLOW_CLOCKʱ�ӿ���ѡ�����RTC8M_CLK������
����ESP32��������ʱ,���е���������ӦAPB_CLK�ر������ܹ���,������LEDC�������������,����ʵ�ִ������ƵIJ�����
- �ź�Ƶ������
ʱ���źŻ����ξ�����Ƶ���ͼ�����,�����������Ƚ��õ��źš�
������������ֱ�Ӿ��������PWM������,��,����ͼ��ʾ,��0�����ֵ�Ĺ��̶�Ӧ��PWM���ε�һ�����ڡ�
��Ƶ�ʵļ���������ʽ��ʾ:
f P W M = f c l o c k �� Ƶ ϵ �� ? �� �� ֵ f_{PWM}=\frac{f_{clock}}{��Ƶϵ��*���ֵ} fPWM?=��Ƶϵ��?����ֵfclock??
��Ƶϵ����LEDC_CLK_DIV_NUM_HSTIMERx����
���Ϊ 2 L E D C _ H S T I M E R x _ D U T Y _ R E S 2^{LEDC\_HSTIMERx\_DUTY\_RES} 2LEDC_HSTIMERx_DUTY_RES

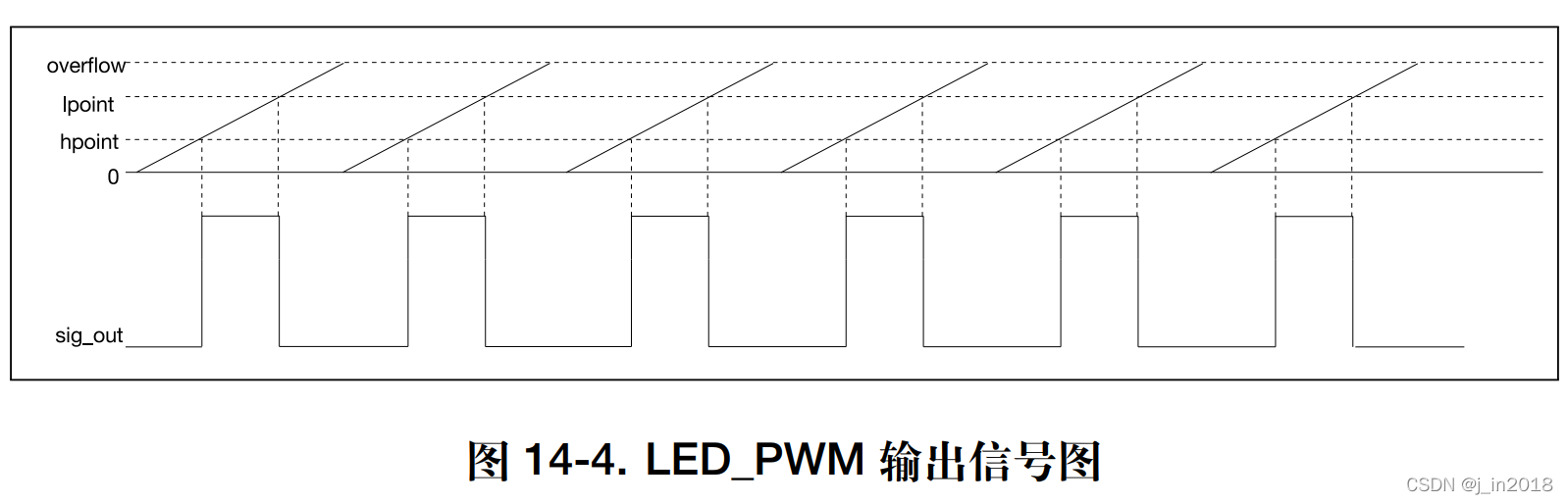
- PWM���εIJ���
������ͼΪ��,�ϲ���Ϊ������Ƶ�������ļ����ź�,��������Ϊʵ�������PWM���Ρ�ͨ���Ƚϼ����ź���hpoint,lpoint��ֵ,����������ߵ�ƽ�����䡣
����������������ȵļ�����н���������ͼ���ǿ��Կ���,��һ��������,����0�����ֵ�Ĺ���,���ֵ�Ĵ�Сֱ�Ӿ������������������Сʱ����ȡ��������ֵΪ256,��,��С��ʱ�侫��Ϊ1/256*һ������ʱ�䡣
���,Ϊ�˵õ���ߵĽ�����,���ȿ϶���ϣ����ʱ�ӽ��з�Ƶ,��Ϊ:
�� �� ֵ = ʱ �� Ƶ �� �� �� Ƶ �� ���ֵ=\frac{ʱ��Ƶ��}{���Ƶ��} ����ֵ=����Ƶ��ʱ��Ƶ��?
����80MHz��ʱ��,Ϊ�����40MHz���ź�,�������ֻ����0,1֮��仯,��ʱռ�ձ�ֻ��Ϊ50%,������Ϊ1���������20MHz���ź�,�������������0,1,2,3��仯,��������25%,50%,75%���ź�,������Ϊ2��
����,����Լ�����ڵ�ǰʱ���¿���ʵ�ֵ�����������,Ĭ������¿����������logʽ�ӽ��м���(������ʱ��Ϊ80Hz)
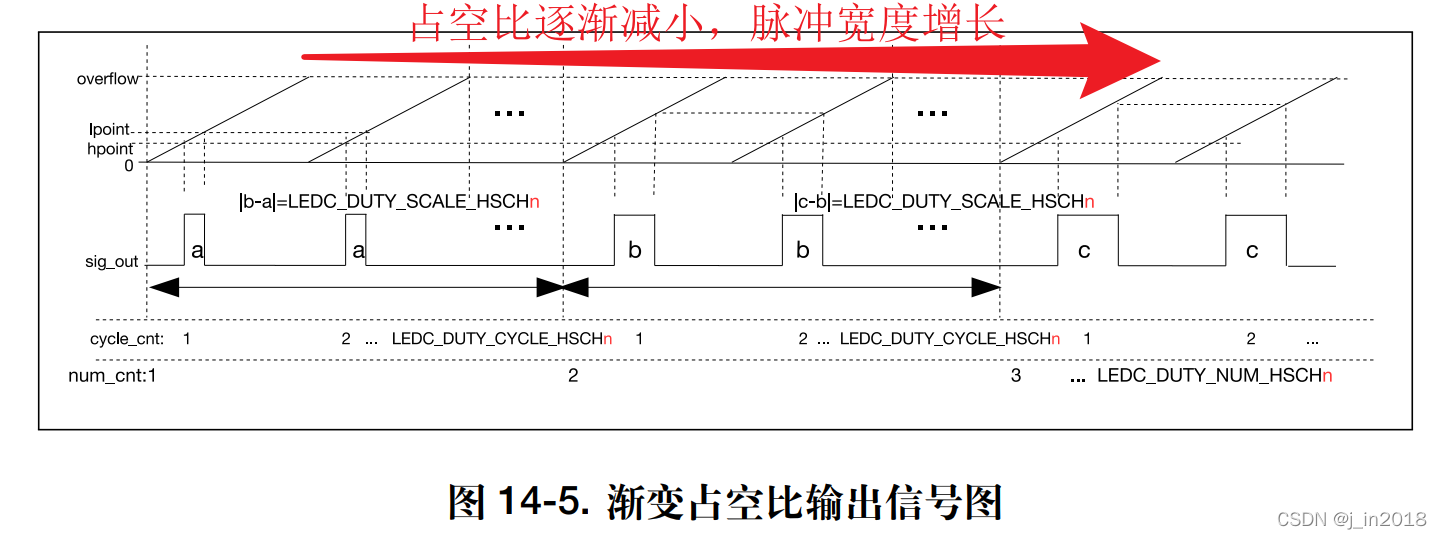
����,֧��������ʾ�Ľ���ռ�ձȵ��趨,���������С�ķ���,��ÿ�������С�IJ��������Խ��е�����
��ؼĴ���:
LEDC_DUTY_INC_HSCHn:��������;
LEDC_DUTY_SCALE_HSCHn:����ÿ�ν���IJ���;
LEDC_DUTY_NUM_HSCHn:��������IJ���;
2.3 LEDC��ʹ��
���һ��5kHz,60%��������(40%ռ�ձ�)��PWMѶ��
������:����PWMͨ���C>ָ��������ŨC>���
double ledcSetup(uint8_t channel, double freq, uint8_t resolution_bits);//����ֵΪ�趨Ƶ��,���Ż�0��ʾ����ʧ��
void ledcWrite(uint8_t chan, uint32_t duty);
uint32_t ledcRead(uint8_t chan);��ȡ�趨duty
void ledcAttachPin(uint8_t pin, uint8_t chan);
void ledcDetachPin(uint8_t pin);
uint32_t brightness=0;
void setup(){
ledcSetup(0, 5000, 10); //ͨ��0, 5KHz,10λ������
ledcAttachPin(25, 0); //pin25����Ϊͨ��0���������
}
void loop(){
ledcWrite(0, brightness); // ͨ��0���, PWM���0~100%(0~2^10=1024)
printf("%u\n", brightness);
if (!(++brightness % 1024)){
brightness=0;
}
}
����PWMѶ�ŵ�Ƶ��-�������������̶�����,��ͬ����������
ESP32��֧��Arduino��tone()����
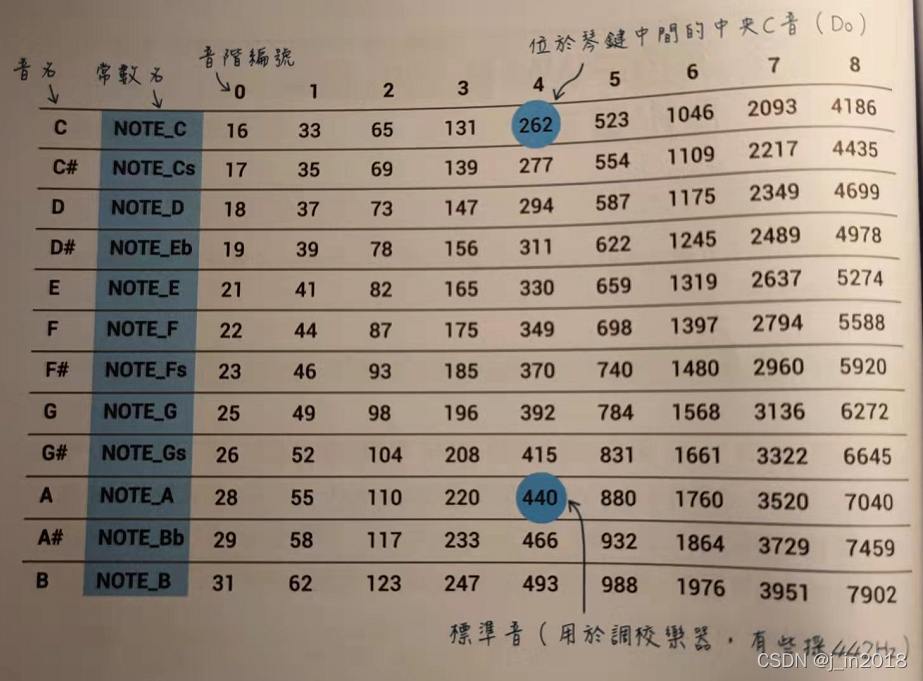
double ledcWriteTone(uint8_t chan, double freq); // �趨LEDCͨ����50%ռ�ձȷ���ָ��Ƶ������,����freq,������0����ڴ���;
double ledcWriteNote(uint8_t chan, note_t note, uint8_t octave); // ����������������ָ��������
�ο����ס�����
void setup(){
ledcSetup(0, 20000, 10);
ledcAttachPin(25, 0);
}
void loop(){
ledcWriteTone(0, 262); // ��ͨ��0����262Hz��Ƶ��
ledcWriteNote(0, Note_C, 4); // ��ͨ�������C4��(��262Hz),��Ч
ledcWriteTone(0, 0); // ֹͣ���
}
��һ����Դ�����������ij���
typedef struct data{
uint32_t pitch; // ����Ƶ��
uint16_t interval; // ���ʱ��
} note;
note tones[] = {
{659, 1000},
{440, 1000}
};
byte toneSize = sizeof(tones) / sizeof(note);
void alarmSnd(){
static uint8_t i = 0;
ledcWriteTone(0, tones[i].pitch);
delay(tones[i].interval);
if (++i % toneSize==0){
i = 0;
}
}
void setup(){
ledcSetup(0, 20000, BITS);
ledcAttachPin(BUZZER_PIN, 0);
}
void loop(){
alarmSnd();
}
�����
��ESP32 ��ͼ�⡷-��Ӣ��
��ESP32 ��������顷-���ιٷ�