基于74HC595串行动态数码管显示
一、74HC595简介
74HC595是一个8位串行输入、平行输出的位移缓存器:平行输出为三态输出。在SCK的上升沿,单行数据由SDL输人到内部的8位位移缓存器,并由Q7‘输出,而平行输出则是在LCK的上升沿将在8位位移缓存器的数据存人到8位平行输出缓存器。当串行数据输人端OE的控制信号为低使能时,平行输出端的输出值等于平行输出缓存器所存储的值。而当OE为高电位,也就是输出关闭时,平行输出端会维持在高阻抗状态。
串行输入,并行输出。
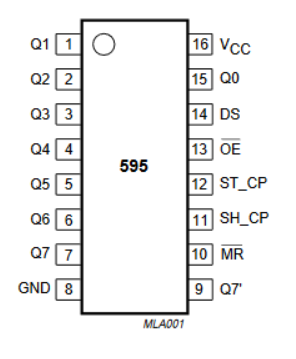
| 符号 | 引脚 | 描述 |
|---|---|---|
| Q0~Q7 | 第15脚,第1~7脚 | 8位并行数据输出 |
| GND | 第8脚 | 地 |
| Q7’ | 第9脚 | 串行数据输出,级联输出端,接下一个595的DS端 |
| MR  ̄ \overline{\text{MR}} MR | 第10脚 | 低电平有效,清空移位寄存器中已有的数据,一般不用,接高电平即可 |
| SH_CP或SCK | 第11脚 | 移位寄存器时钟引脚,上升沿时,移位寄存器中的数据整体后移,并接受新的数据(从DS输入)。 |
| ST_CP 或RCK | 第12脚 | 存储寄存器时钟输入引脚。上升沿时,数据从移位寄存器转存带存储寄存器。 |
| OE  ̄ \overline{\text{OE}} OE | 第13脚 | 低电平有效,输出使能控制脚,所以接GND |
| DS | 第14脚 | 串行数据输入引脚 |
| VCC | 第16脚 | 电源 |
二. 输入
串行输入
SH_CP上升沿输入,输入一位往后移动一位
void LED_OUT(u8 outdata)
{
u8 i;
for(i=0;i<8;i++)//循环8次 高位先行
{
if (outdata & 0x80)//逐一取出最高位 1000 0000 b
DIO=1;//送出“1”
else
DIO=0;//送出“0”
outdata<<=1;//执行左移一位操作
SCLK=0;
SCLK=1;//SCLK产生上升沿,移位寄存器中的数据整体后移,并接受新的数据(从DS输入)
}
}
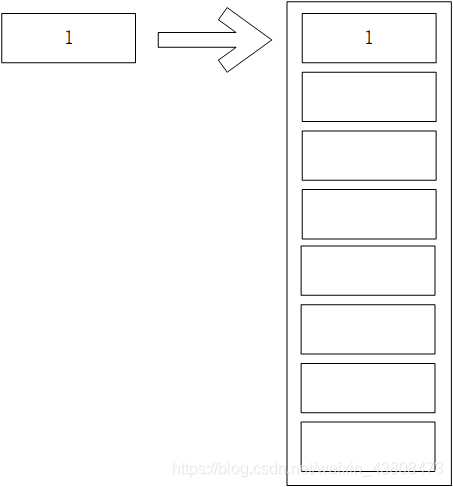
例:输入11010110
①SH_CP(SCLK)上升沿,移位寄存器中的数据整体后移,并接受新的数据(从DS输入)
高
位
先
行
\color{red}{高位先行}
高位先行
②SH_CP上升沿,SH_CP(SCLK)上升沿,移位寄存器中的数据整体后移,并接受新的数据(从DS输入)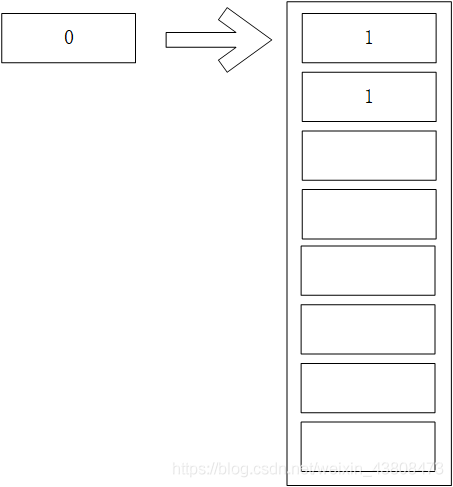
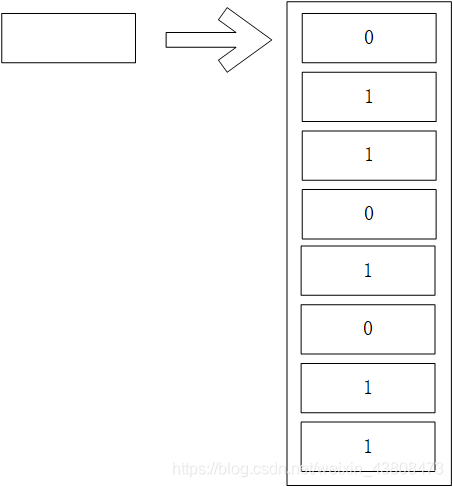
③SH_CP上升沿×6
三. 输出
ST_CP(RCK,存储寄存器时钟输入引脚)上升沿时,数据从移位寄存器转存带存储寄存器。
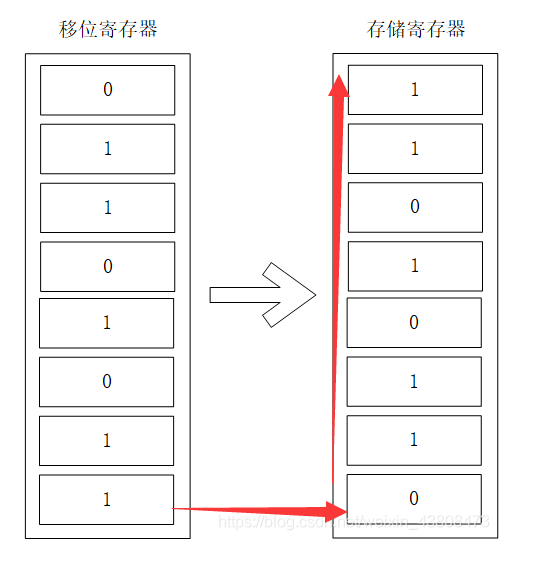
四. 4位数码管模块使用
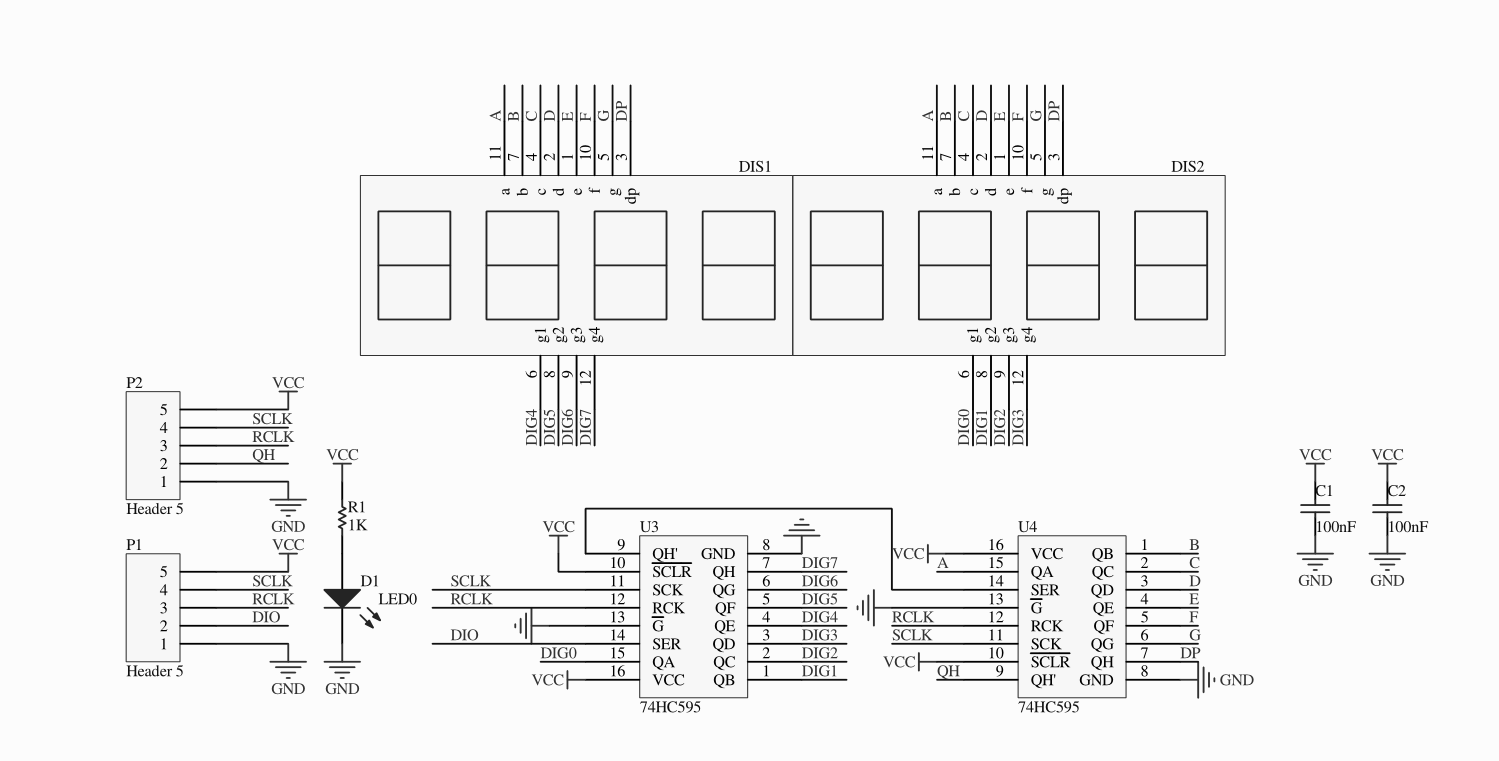
电路图如下所示,图中是8位数码管的电路图,与4位相似,都具有两片595驱动芯片,两片595级联在一起,第二片595(U4)是对数码管的8段码进行段码操作,第一片595(U3)是对8位数码管进行位选操作,即选择哪一个数码管进行显示操作。
虽然595具有存储寄存器,但是只能对一位数码管的数据进行数据锁存。
代码如下,基于STM32F407
/*
*PB4...........DIO
*PB5...........RCLK
*PB6...........SCLK
*/
#define DIO PBout(4) //串行数据输入
#define RCLK PBout(5) //存储寄存器 锁存控制信号(上升沿有效)
#define SCLK PBout(6) //移位寄存器 时钟脉冲信号(上升沿有效)
void HC595_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB,ENABLE); //使能GPIOG的时钟
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_OUT;//输出
GPIO_InitStructure.GPIO_OType=GPIO_OType_PP; //推挽输出
GPIO_InitStructure.GPIO_PuPd=GPIO_PuPd_DOWN; //下拉输出
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_100MHz; //高速GPIO
GPIO_Init(GPIOB,&GPIO_InitStructure);
GPIO_ResetBits(GPIOB,GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6);
}
u8 LED_table[18]={
//01234567
0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,
//89ABCDEF
0x80,0x90,0x88,0x83,0xC6,0xA1,0x86,0x8E,
//熄灭-
0xFF,0xBF};
//共阳数码管段码“0123456789AbCdEF熄灭-”
u8 wei_table[8]={0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80};
//第一位至第八位位码
/****************************************************************/
//数码动态显示函数LED8_Display(),有形参x和y,无返回值
//x表示位选择,y表示欲显示的数码
/****************************************************************/
void LED8_Display(u8 x,u8 y)
{
LED_OUT(LED_table[y]);//送出段码
LED_OUT(wei_table[x]);//送出位码
RCLK=0;
RCLK=1;//RCLK产生上升沿
delay_ms(1);
}
/****************************************************************/
//单字节数据串行移位函数LED_OUT(),有形参outdata用于传入实际数据
//无返回值
/****************************************************************/
void LED_OUT(u8 outdata)
{
u8 i;
for(i=0;i<8;i++)//循环8次
{
if (outdata & 0x80)//逐一取出最高位 1000 0000 b
DIO=1;//送出“1”
else
DIO=0;//送出“0”
outdata<<=1;//执行左移一位操作
SCLK=0;
SCLK=1;//SCLK产生上升沿
}
}
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置系统中断优先级分组2 uart4 2/3 usart1 3/3 Usart2 2/0 uart5 2/1
delay_init(168); //初始化延时函数
uart_init(115200);//初始化串口波特率为115200
HC595_Init();
while(1)
{
LED8_Display(0,8);
LED8_Display(1,7);
LED8_Display(2,6);
LED8_Display(3,5);
while(1)
{
// delay_ms(100);
}
}
}