ЖдЪРНчДѓЖрЪ§ШЫЖјбд,ШЫЩњвЛЮовтвх,ЖўЮоМлжЕЁЃ
ЈC МОЯлСж
зМБИЙЄзї
- ЯТди RT-Thread Nano дДТы:https://github.com/RT-Thread/rtthread-nano/archive/refs/heads/master.zipЁЃ
ФПЧАЕФзюаТАцБОЪЧ 3.15(аДгк2022-3-1) - аТНЈ GD32F10xЯЕСаЕФ ТуЛњKeilЙЄГЬ
етЦЊЮФеТвбОНВЪіЕФКмЧхГўСЫ,ЮвОЭВЛзИЪіСЫЁЃЕБШЛФуЫцБуеввЛИіФмГЩЙІдЫааЕФkeilЙЄГЬвВПЩвдСЫЁЃ
ЁОГЌМЖЯъЯИНЬГЬЁПИј GD32F10x ЯЕСаНЈСЂkeilЙЄГЬ - зюКѓЕФЙЄГЬЮФМўвбОЗХдкСЫ
githubЩЯУц:GD32F10x_RTThread_Project
ШчЙћЪЙгУ github ВЛЗНБуЕФЛА,ЧыЙизЂЙЋжкКХЁЖЧЖШыЪНаЁЩЂаоЁЗ,ЛиИД20220306МДПЩЛёШЁЙЄГЬЮФМўЁЃ

вЦжВ RT-Thread
ЪЕЯжRT-ThreadЕФЛљБОЙІФм
ЦфЪЕИќЗНБуЕФЪЧЭЈЙ§АВзА RT-Thread Nano pack ЕФЗНЪНШЅЪЕЯж:ЁЖЛљгк Keil MDK вЦжВ RT-Thread NanoЁЗЁЃ
ЕЋЪЧЮЊСЫИќКУЕиРэНтдкЙЙНЈЙЄГЬжаRT-ThreadЕФзщГЩвдМАЙЙНЈжаВЛЭЌаОЦЌашвЊЕФЮФМў,ЫљвдЮвбЁдёЪжЖЏЬэМгЕФЗНЪНЁЃ
- дкЙЄГЬЮФМўМаФПТМЯТаТНЈУћЮЊ
rtthreadЕФЮФМўМа,ПНБДШчЯТЮФМўЕНИУФПТМ:
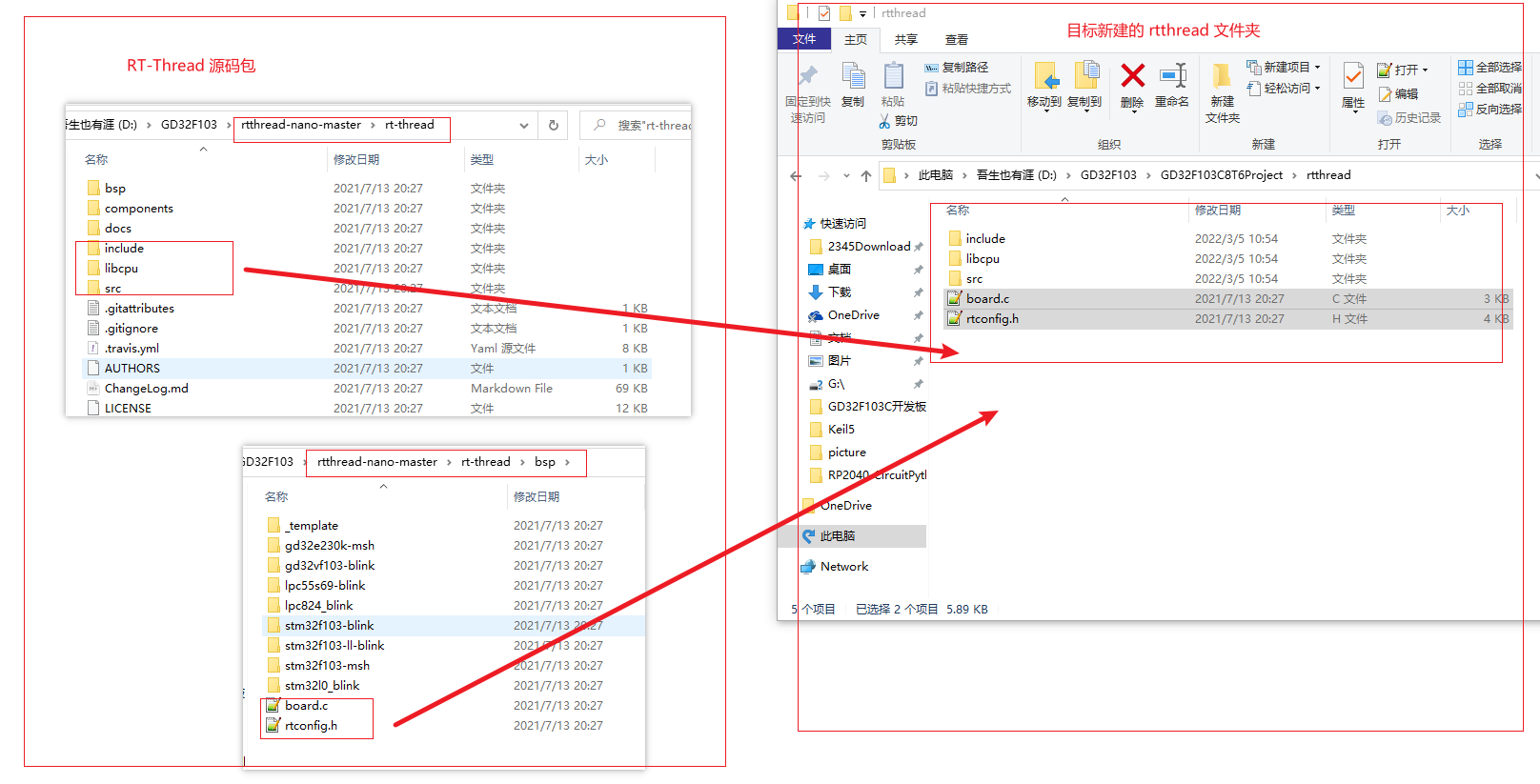
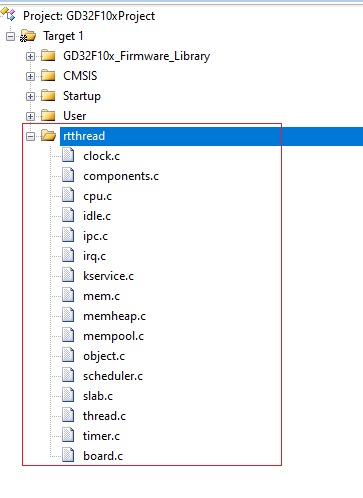
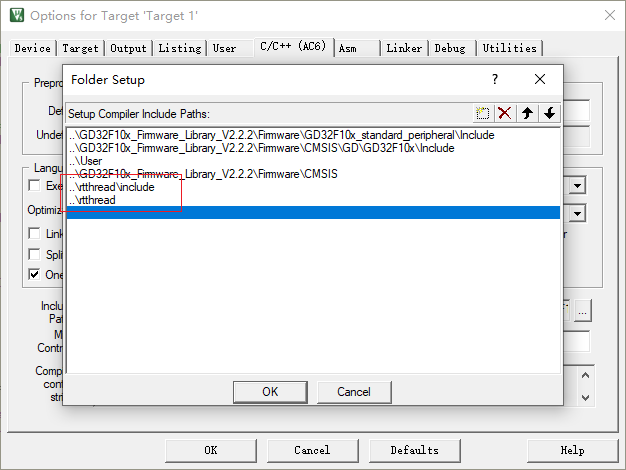
- ЬэМгRT-Thread ФкКЫЫљгаЭЈгУЕФДњТыЕН keil ЙЄГЬ(ЭЌбљашвЊаТНЈвЛИіУћЮЊ rtthread ЕФЗжзщ),ШчЯТЭМЫљЪО:
ЬэМгЙЄГЬЯТ rtthread/src/ ЮФМўМажаЫљгаЮФМўЕНЙЄГЬ;
ЬэМг rtthread/ ЮФМўМаЯТЕФ board.c ЁЃ
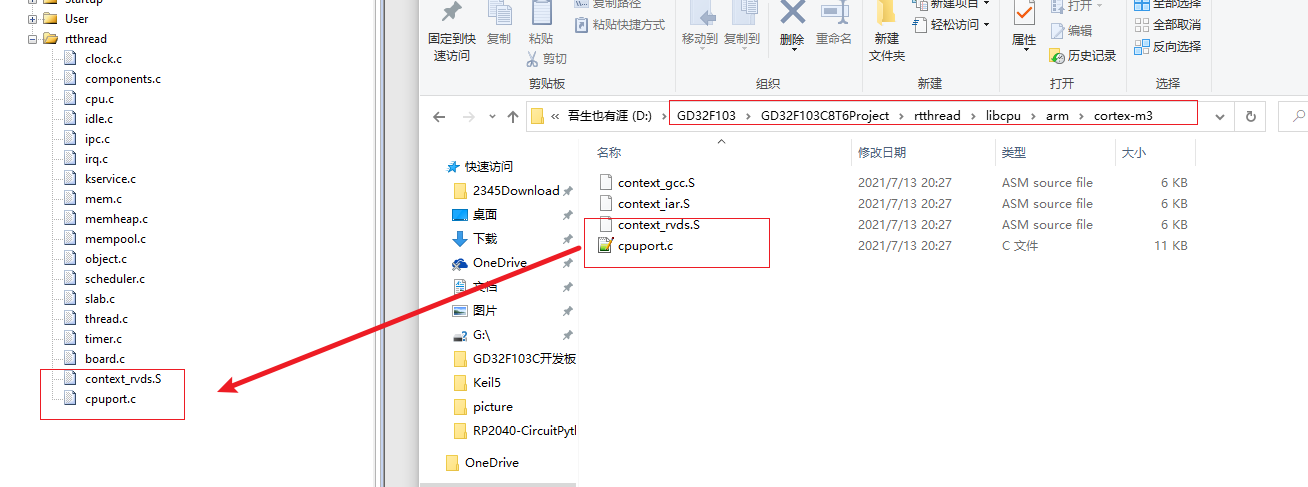
- ЬэМгЖдгІаОЦЌЕФФкКЫЕФ CPU вЦжВЮФМўМАЩЯЯТЮФЧаЛЛЮФМў
гЩгкБОДЮЕФаОЦЌ GDF103C8T6 Ъєгк ARM ЕФ Cortex-M3ЯЕСа,ЫљвдашвЊЬэМгЖдгІЯЕСаЕФЮФМў:ФкКЫЕФ CPU вЦжВЮФМўМАЩЯЯТЮФЧаЛЛЮФМў:cpuport.c(еыЖдОпЬхаОЦЌМмЙЙ,БШШчCortex-M3)вдМАcontext_rvds.S(еыЖдаОЦЌМмЙЙКЭide,етИіЪЧдкkeilЩЯЪЙгУЕФ)ЁЃ
- діМг
rtthreadЕФЭЗЮФМўТЗОЖ:
- БрвыЙЄГЬ,ЗЂЯжШ§ИіДэЮѓ
 двђдкгкетШ§ИіжаЖЯКЏЪ§дкRT-ThreadвбОЖЈвхКУСЫ,ЮвУЧАб gd32f10x_it.c ЮФМўМажажиИДЕФКЏЪ§ЩОМДПЩЁЃ
двђдкгкетШ§ИіжаЖЯКЏЪ§дкRT-ThreadвбОЖЈвхКУСЫ,ЮвУЧАб gd32f10x_it.c ЮФМўМажажиИДЕФКЏЪ§ЩОМДПЩЁЃ
ИљОнБрвыЕФДэЮѓЬсЪО,ЩОГ§void SysTick_Handler(void)ЁЂvoid PendSV_Handler(void)ЁЂvoid HardFault_Handler(void),дйБрвыЗЂУЛгаДэЮѓСЫЁЃ - жСДЫ,RT-Thread ЕФЛљДЁЙЄГЬОЭЭъГЩСЫ,дк
main.cТыШыШчЯТДњТы,ПЩвдПДЕН LED ЕЦЩСЫИзХЬјЖЏЕФЙт,етаФдрАуЕФЬјЖЏЫЕУїЙЄГЬвбОЭъГЩСЫЛљБОЕФЙІФм,ПЩвдПЊЪМгфПьЕФЭцЫЃСЫЁЃ
#include <rtthread.h>
int main(void)
{
/* enable the led clock ЪЙФм IOНгПкЪБжг */
rcu_periph_clock_enable(RCU_GPIOC);
/* configure led GPIO port */
gpio_init(GPIOC, GPIO_MODE_OUT_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_13);
while(1)
{
gpio_bit_set(GPIOC, GPIO_PIN_13);
rt_thread_mdelay(500);
gpio_bit_reset(GPIOC, GPIO_PIN_13);
rt_thread_mdelay(500);
}
}
ЬэМгПижЦЬЈгы FinSH
ЬэМг UART ПижЦЬЈ
ИУЙІФмЦфЪЕЪЕЯжЕФЪЧДђгЁЙІФм,ЦфЪЕРрЫЦЮвУЧЦНЪБЪЙгУЕФ printf КЏЪ§,ЮвУЧПЩвдЭЈЙ§етИіЙІФмЖдЭтЗЂЫЭаХЯЂ,ЗНБуЕїЪдДњТыЁЃ
вЛАуЪЙгУДЎПкзїЮЊДђгЁЕФДЋЪфНгПкЁЃ
ФЧУДНЋЦфдк RT-Thread ЩЯУцЪЕЯжОЭКмМђЕЅСЫ:ДЎПкГѕЪМЛЏКЭЯЕЭГЪфГіКЏЪ§ЁЃ
- ДЎПкГѕЪМЛЏ
ЪЙФмRT_USING_CONSOLEКъЖЈвх
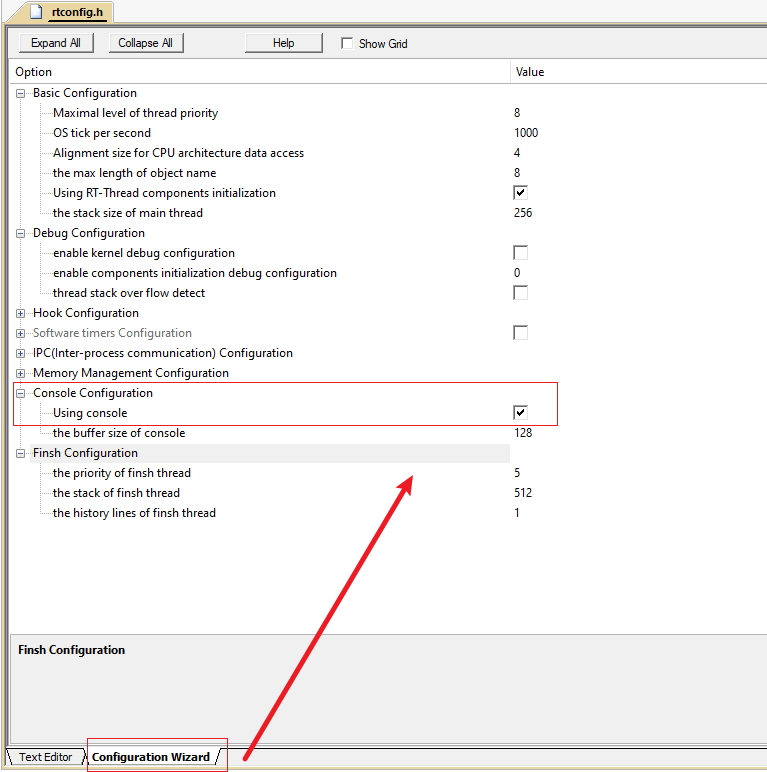
зЂЪЭЕєЖргрЕФКъЖЈвх(ЯТУцЕФКъЖЈвхКЭrtconfig.hжиИДСЫ)
дк boart.c ЮФМўМгШыШчЯТДњТыМДПЩЪЕЯжЪфГіДђгЁЙІФм
static int uart_init(void)
{
/* enable GPIO clock ЪЙФмДЎПк1в§НХIOЪБжг */
rcu_periph_clock_enable(RCU_GPIOA);
/* enable USART clock */
rcu_periph_clock_enable(RCU_USART0);
/* connect port to USARTx_Tx */
gpio_init(GPIOA, GPIO_MODE_AF_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_9);
/* connect port to USARTx_Rx */
gpio_init(GPIOA, GPIO_MODE_IN_FLOATING, GPIO_OSPEED_50MHZ, GPIO_PIN_10);
/* USART configure */
usart_deinit(USART0);
usart_baudrate_set(USART0, 115200); //ЩшжУДЎПкВЈЬиТЪ
usart_word_length_set(USART0, USART_WL_8BIT); //зжГЄЮЊ8ЮЛЪ§ОнИёЪН
usart_stop_bit_set(USART0, USART_STB_1BIT); //вЛИіЭЃжЙЮЛ
usart_parity_config(USART0, USART_PM_NONE); //ЮоЦцХМаЃбщЮЛ
usart_hardware_flow_rts_config(USART0, USART_RTS_DISABLE); //ЮогВМўЪ§ОнСїПижЦ
usart_hardware_flow_cts_config(USART0, USART_CTS_DISABLE); //ЮогВМўЪ§ОнСїПижЦ
usart_receive_config(USART0, USART_RECEIVE_ENABLE); //ЪеЗЂФЃЪН
usart_transmit_config(USART0, USART_TRANSMIT_ENABLE);
usart_enable(USART0); //ЪЙФмДЎПк0
return 0;
}
INIT_BOARD_EXPORT(uart_init); /* ФЌШЯбЁдёГѕЪМЛЏЗНЗЈвЛ:ЪЙгУКъ INIT_BOARD_EXPORT НјааздЖЏГѕЪМЛЏ */
void rt_hw_console_output(const char *str)
{
rt_size_t i = 0, size = 0;
char a = '\r';
size = rt_strlen(str);
for (i = 0; i < size; i++)
{
if ( *(str+i) == '\n')
{
usart_data_transmit(USART0,a);
while(RESET == usart_flag_get(USART0, USART_FLAG_TBE));
}
usart_data_transmit(USART0, *(str+i));
while(RESET == usart_flag_get(USART0, USART_FLAG_TBE));
}
}
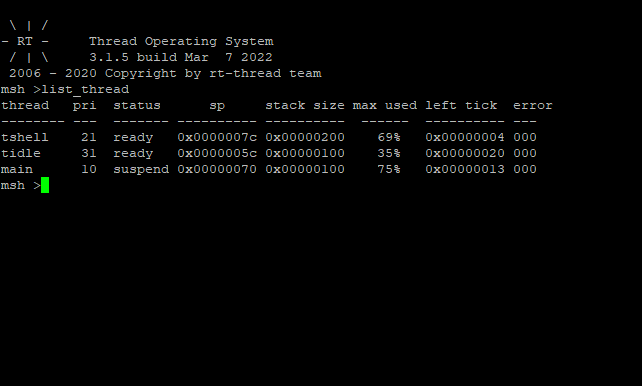
аЇЙћШчЯТ:
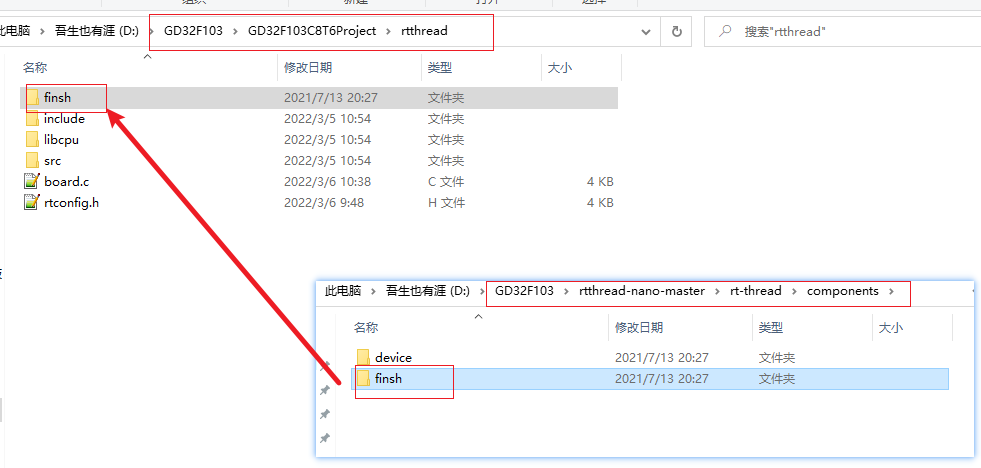
ЬэМг FinSH зщМў(ЪЕЯжУќСюЪфШы)
RT-Thread FinSH ЪЧ RT-Thread ЕФУќСюаазщМў(shell),ЬсЙЉвЛЬзЙЉгУЛЇдкУќСюааЕїгУЕФВйзїНгПк,жївЊгУгкЕїЪдЛђВщПДЯЕЭГаХЯЂЁЃЫќПЩвдЪЙгУДЎПк / вдЬЋЭј / USB ЕШгы PC ЛњНјааЭЈаХЁЃЦфЪЕОЭЪЧЖрСЫИіНЛЛЅЙІФм,вдЧАжЛФмБЛЖЏВщПДЪфГі,ЯждкПЩвдЭЈЙ§ЪфШыжїЖЏШЅЛёШЁвЛаЉЖЋЮїЁЃ
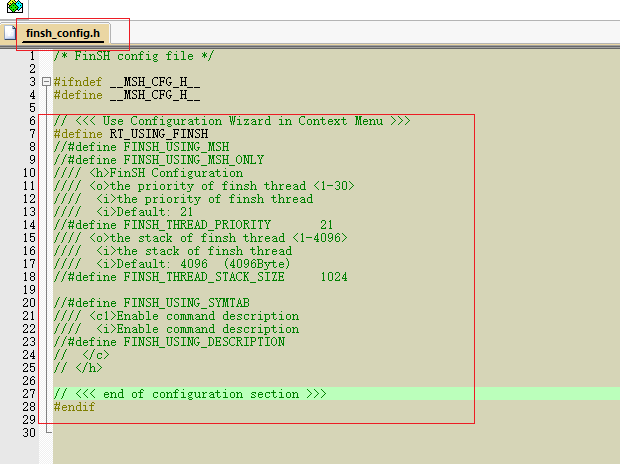
- НЋRT-Thread дДДњТыжаЕФ FinSh ЮФМўПНБДЕНФПБъЙЄГЬ
ЬэМгШыЙЄГЬ
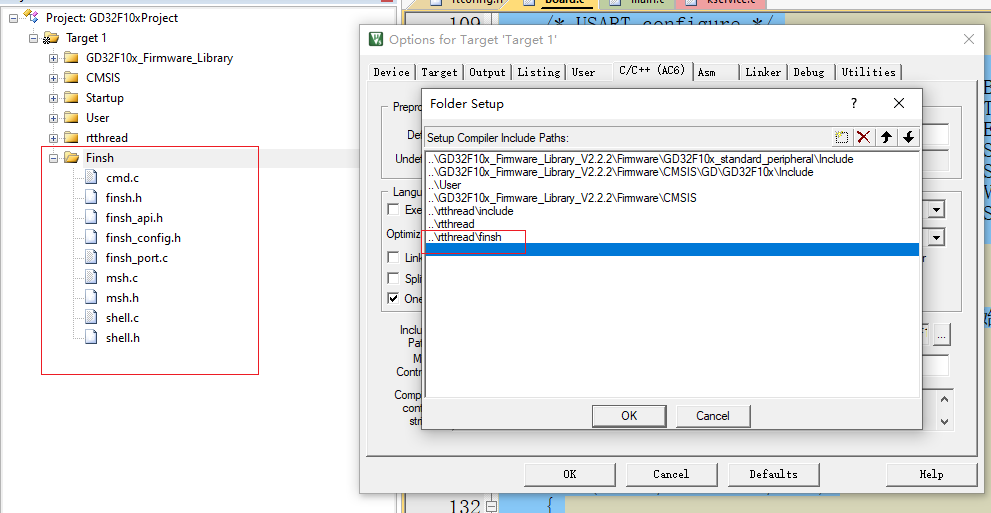
дк rtconfig.h жаЪЙФм #define RT_USING_FINSH КъЖЈвх,дкИУЮФМўМгШы#defined RTE_USING_FINSHЁЃ - ЪЕЯж rt_hw_console_getcharКЏЪ§
char rt_hw_console_getchar(void)
{
/* the initial value of ch must < 0 */
int ch = -1;
if (usart_flag_get(USART0, USART_FLAG_RBNE) != RESET)
{
ch = usart_data_receive(USART0);
}
else
{
rt_thread_mdelay(10);
}
return ch;
}
аЇЙћШчЯТ: