https://blog.csdn.net/Zach_z/article/details/80548423
��������֮��������ѧϰ
LED
8�ֹ���ģʽ��������ģʽ
- ��������:�ܽ�ʲô������,������
- ��������:�ѵ�λ����,����Vcc
- ��������:�ѵ�ƽ����
- ģ������:ͨ��ģ��ת��,ת���������ź�,Ӧ��ADCģ������,�������ʡ��
8�ֹ���ģʽ�������ģʽ - ��©���: IO���0��GND,���1����,�����յ������������ǿ
- �������:IO���0-��GND,1-��VCC,��������ߵ�ƽ�͵�ƽ,������������
- ���ù����������
- ���ù��ܿ�©���:GPIO�ڱ������ڶ�����ʱ������
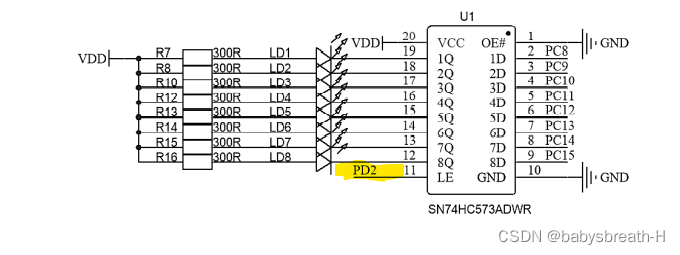
LEDԭ��
- ͨ��һ������������,ʹ������ΪPD2
- PC8-PC15��ӦLED1-LED8
- PC8-PC15ͬʱ������LCD��ʾ�����ݵĸ�8λ
LED����
����д�뺯��
HAL_GPIO_WritePin() ����ij����
��ת����״̬
HAL_GPIO_TogglePin (GPIOC,GPIO_PIN_8)
�Ĵ���
GPIOx_BSRR��һ��32λ��λ��λ�Ĵ���
GPIO_ODR��һ����������Ĵ���
HAL���ʹ��
stm32g4xxx_hal_gpio.h�����ļ�����ҵ��ɲ����Ŀ⺯��,stm32cubeMX��ֱ������
�����ͷ�����
��Դ������,��ֱ��ת��Ϊ����һ�����ڵ�����
PB3�͵�ƽ,��������
����
stm32g4xx_hal_gpio.h���ж�GPIO���в�����һЩ����
- HAL_GPIO_ReadPin ��ȡGPIO��״̬
��������
��ʱ5��10����
if(key==GPIO_PIN_RESET)
{
HAL_DELAY(10);
if(key==GPIO_PIN_RESET)
{
ִ�в���
}
}
�������
stm32g4xx_it_c�����˸����жϺ���
LCD9325
262,144ɫ��оƬSoC����,�ֱ���:240RGB*320��
16λ����ͨ��,PC0-PC15
- ��LCD��10��(Line0�CLine9),20�С�ÿһ�������������24*16
���ɹ���
����ʱ���ṩLCD���������������,���LCD�����ų�ʼ��������STM32cube MX�����,����ͨ��������������ʵ��
- ��stm32cubeMX����û�����ʱ��,����һ��project
- �ڹٷ��ṩ����������:lcd_hal_h,lcd_hal.c,fonts.h ���ӵ��ù�����
- ��keil�� add files ����lcd-hal.c�ļ�,�������ļ������� lcd_hal.h��ͷ�ļ�
LCD��Ӧ��
����Ҫ�� �ڵװ���
- LCD_Init():LCD�ij�ʼ��
���ǿ�����lcd_hal.c�ļ����ҵ�һЩ��ʹ�õĺ���
LCD_DisplayStringLine(Line4 ,(unsigned char *)" Hello,world. ");
LCD_DisplayChar(120,120,0X51); //��ָ��λ����ʾһ���ַ�
sprintf����
������ô�ѴӴ��ڴ��������ַ���ʾ����ʾ������?----�ȳ�ʼ��LCD,�ٽ���sprintf��LCD_DisplayStringLine()����
���øú�����Ҫ���� stdio.hͷ�ļ�
sprintf((char*)str," Value:%d ", Num); //d��i:�з���ʮ��������
sprintf((char*)str," Value:%i ", Num); //d��i:�з���ʮ��������
sprintf((char*)str," Value:%x ", Num); //����ʮ����������
sprintf((char*)str," Value:%u%% ", Num); //����ʮ��������
sprintf((char*)str," Value:%f ", dot); //ʮ���Ƹ�����
sprintf((char*)str," Value:%0.2f ", dot); //ʮ���Ƹ�����������λС��
sprintf((char*)str," Value:%E ", dou); //ʹ�� E �ַ��Ŀ�ѧ��ѧ������(β����ָ��)
sprintf((char*)str," Value:%0.2f ABC ", dot); //
sprintf((char*)str," Value:%d==%0.2f A ", Num,dot); //�������
sprintf((char*)str," Value:%d ", Num);
LCD_DisplayStringLine(Line8,str);
LCD ��LED����ʹ��
��ΪLCD��LED�������غ�,���Ե�ʹ��LCDʱ,LEDȫ��
- cube��ʼ��ʱ,��Ҫ��ʼ������PD2 (LEDʹ������)
- ��Ҫ����ʹ��LCD,��ʹ��LED,��ر�����LED,�ر�PD2
void Close_LED(void)
{
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_8 | GPIO_PIN_9 | GPIO_PIN_10 | GPIO_PIN_11 |
GPIO_PIN_12 | GPIO_PIN_13 | GPIO_PIN_14 | GPIO_PIN_15, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);
}
- LCD��ʼ��
- �������LED:дLED����----->PD2ʹ��------>PD2ʧ��
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_9 | GPIO_PIN_10 | GPIO_PIN_11 |
GPIO_PIN_12 | GPIO_PIN_13 | GPIO_PIN_14 | GPIO_PIN_15, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);
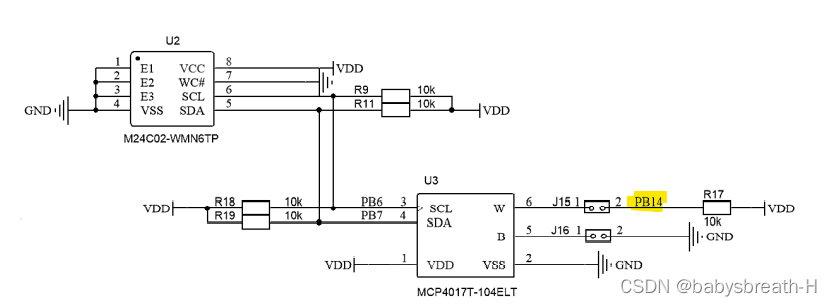
EEPROM��DCP��IIC
EEPROM:��ɲ����洢��
I2C��ʹ��
- ��STM32cubeMX�н�PB6��PB7��,���ɹ���,���ٷ��ṩ��I2C_hal.c��.h�ļ��ŵ��ļ����ڡ���add�ļ�I2C_hal.c
I2C���
- ��������
- Ѱ�Ҵӻ�(дָ��)
- �ȴ���Ӧ
- ѡ���ַ
- �ȴ���Ӧ
- ���
- �ȴ���Ӧ
- ��������
I2C������
- ��������
- Ѱ�Ҵӻ�(дָ��)
- �ȴ���Ӧ
- ѡ���ַ
- �ȴ���Ӧ
- ��������
- ��������
- Ѱ�Ҵӻ�(��ָ��)
- �ȴ���Ӧ
- ������
- ��������
I2C����
- I2CStart:I2C������������,���û�����
- I2CSendByte:д���ݺ���
- I2CWaitAck:���ߵȴ���Ӧ����,����ֵ:д���Ƿ�ɹ�
- I2CReceiveByte:��ȡ(����)���ݺ���,���ض�ȡ������
- I2CStop:����ֹͣ����
EEPROM�����
EEPROM-AT24C02�洢����,�ϵ����ϵ���Զ�ȡ����
��Ҫ�û��������߶�д˳���Լ���д
д
void iic_write(unsigned char address,unsigned char info)
{
I2CStart(); //��������
I2CSendByte(0xa0);//Ѱ�Ҵӻ�(дָ��)
I2CWaitAck();//�ȴ���Ӧ
I2CSendByte(address);//ѡ���ַ
I2CWaitAck();//�ȴ���Ӧ
I2CSendByte(info);//�����
I2CWaitAck();//�ȴ���Ӧ
I2CStop();//��������
}
��
void iic_read(uint8_t address)
{
I2CStart();
I2CSendByte(0xa0);
I2CWaitAck();
I2CSendByte(address);
I2CWaitAck();
I2CStop();
I2CStart();
I2CSendByte(0xa1);
I2CWaitAck();
val= I2CReceiveByte();
I2CStop();
return(val);
}
mcp4017���
���ֵ�λ��
д��һ����ֵ(info=0x��),�ɲ���PB14���ŵĵ�ѹ
void mcp4017_write(unsigned char info)
{
I2CStart();
I2CSendByte(0x5e);
I2CWaitAck();
I2CSendByte(info);
I2CWaitAck();
I2CStop();
}
�ж�
���������ݴ��䷽ʽ:����������,��ѯ��ʽ,�жϷ�ʽ,ֱ�Ӵ洢������
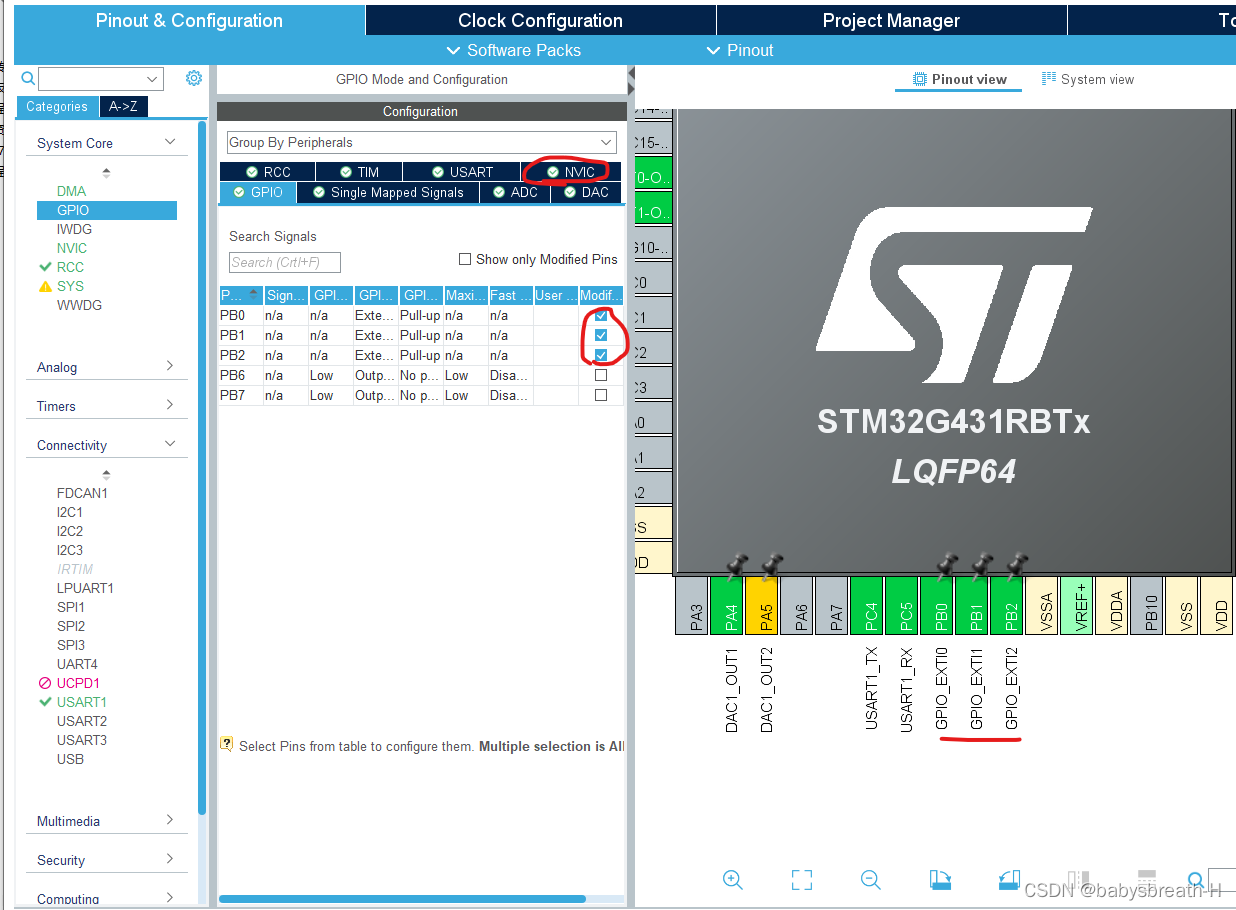
NVIC: Ƕ�������жϿ�����
�ⲿ�жϿ�����:EXTI
�ⲿ�жϵij�ʼ��(NVIC)
- stm32cubeMX����ϵͳʱ��,��������PB0, PB1, PB2
- �����жϳ�������,��GPIO��ѡ���������ش��������½��ش���
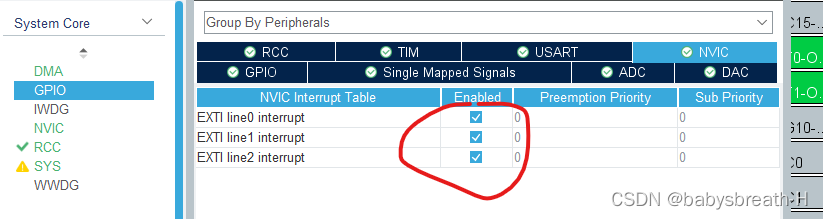
- NVIC�������ⲿ�ж�
- �����ж����ȼ�
- ʹ���ⲿ�ж�
- ����keil�����ļ�
HAL_GPIO_EXTI_IRQHandler(uint16_t GPIO_Pin); ����жϱ�־λ,��ֱ��ִ���жϻص�����,ִ������������
void HAL_GPIO_EXTI_IRQHandler(uint16_t GPIO_Pin)
{
/* EXTI line interrupt detected */
if (__HAL_GPIO_EXTI_GET_IT(GPIO_Pin) != 0x00u)
{
__HAL_GPIO_EXTI_CLEAR_IT(GPIO_Pin);
HAL_GPIO_EXTI_Callback(GPIO_Pin);
}
}
HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin); �û������±�д�ص�����,������жϺ� ִ�е�����
��ʱ��,������
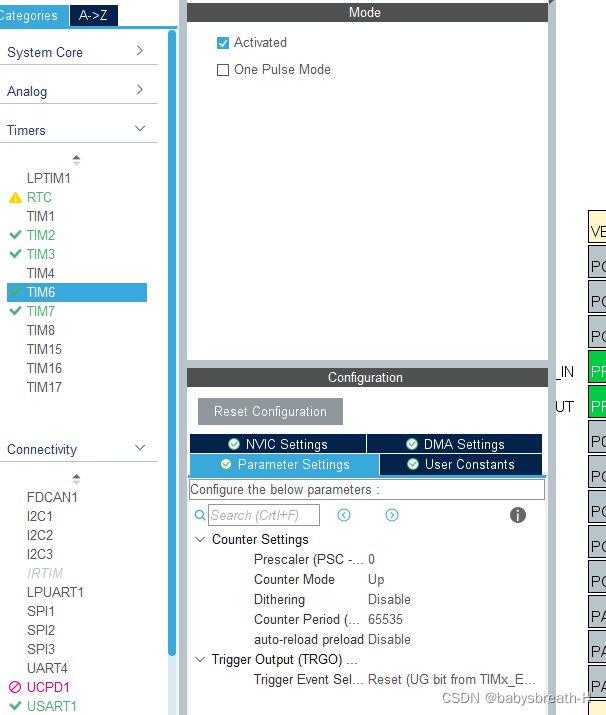
��ʼ��
-
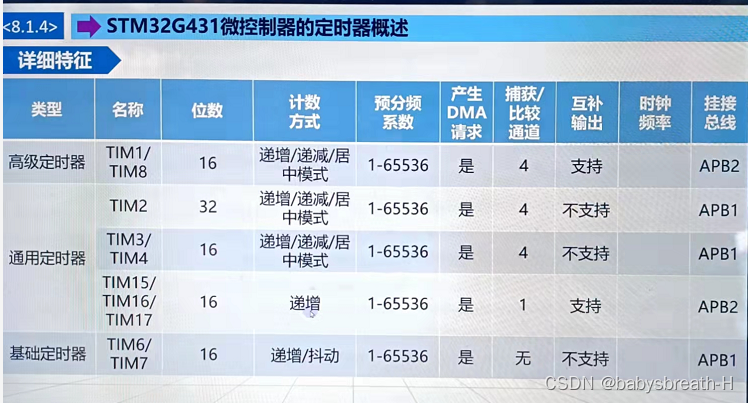
stm32cubeMX�п�������Ҫ�Ķ�ʱ����(��ʱ��6��7)
-
������ʱ��
HAL_TIM_Base_Start_IT (&htim6) �� HAL_TIM_CLEAR_IT(&htim6,TIM_IT_UPDATE)�����û����е��� -
HAL_TIM_PeriodElapsedCallback()�û������б�дʵ�ʵ�����������,���������ж�ʱ���ĸ����ж�
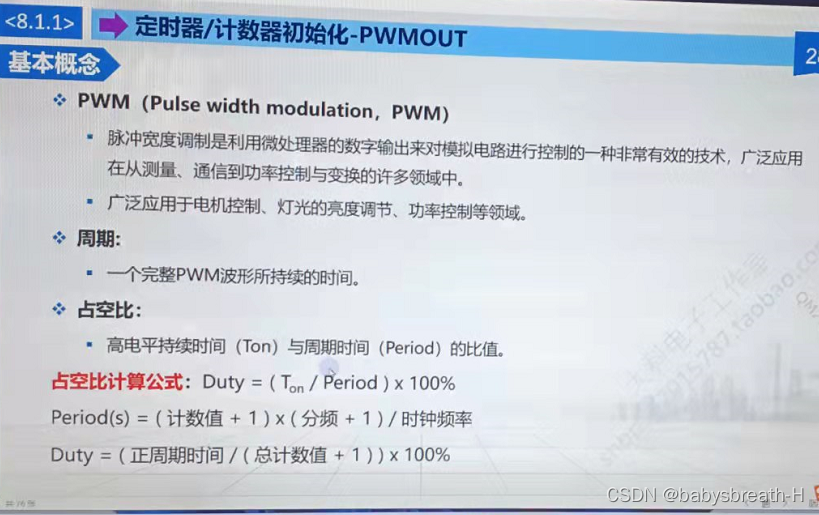
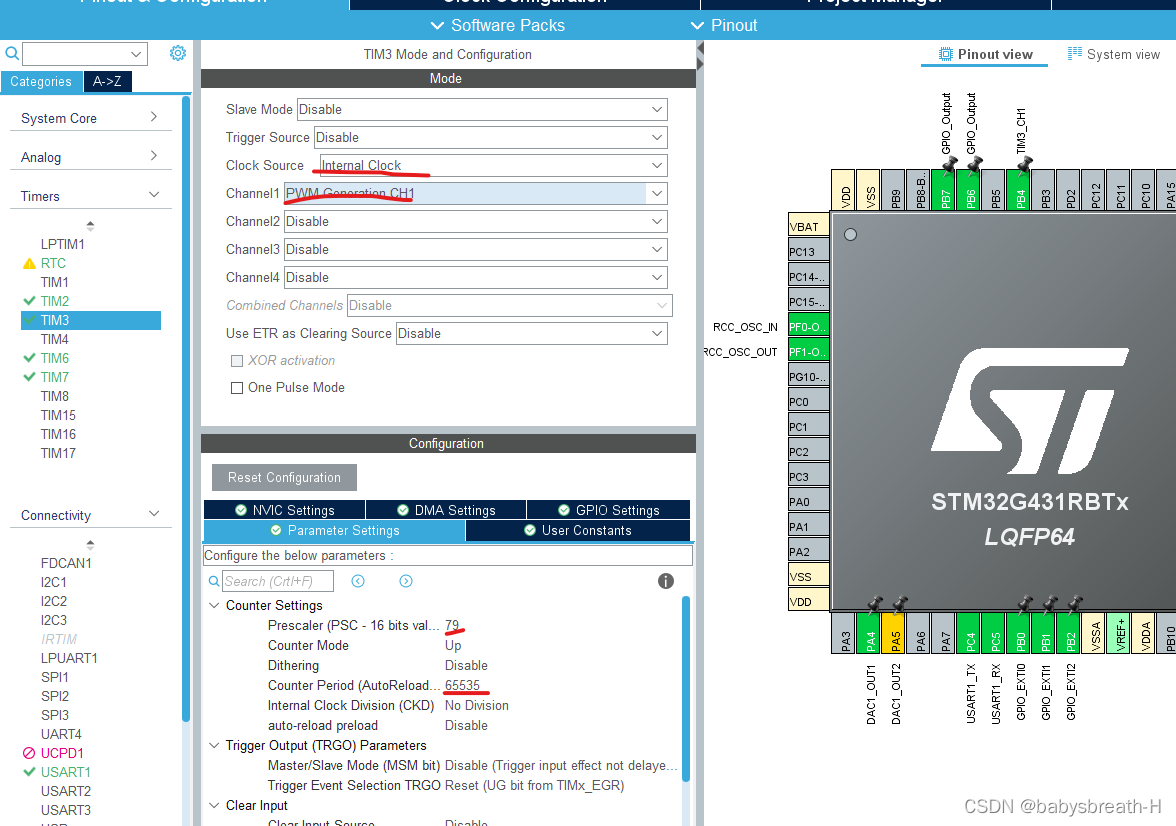
PWMOUT��ʼ��
- stm32cubeMX��:���ú�ϵͳʱ��
- ����PWM������� (��չ���� PA1-PA7)
- ������ض�ʱ��ʱ��(һ��ѡ���ڲ�ʱ��)
- NVIC��ʱ���ж�
- ���÷�Ƶ����,ռ�ձȵ�
- ���ɴ���
KEIL
- ����PWM���
HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_2);
__HAL_TIM_CLEAR_IT(&htim2,TIM_CHANNEL_2);
- д�ص����� HAL_TIM_IC_CaptureCallback(htim);
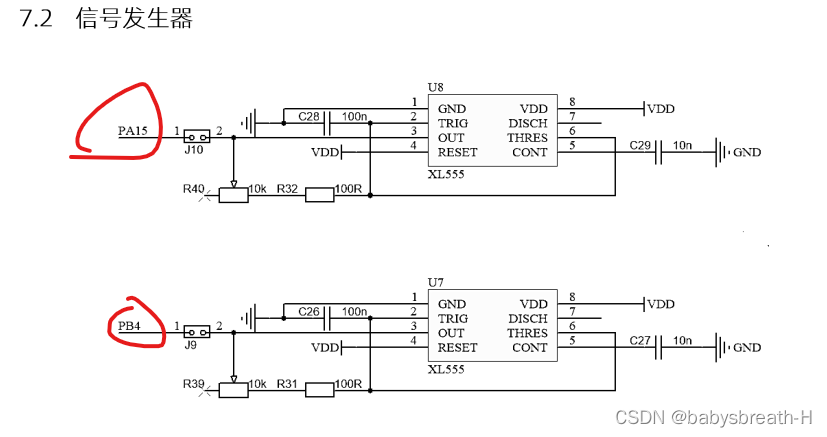
�ڲ���ʱ������
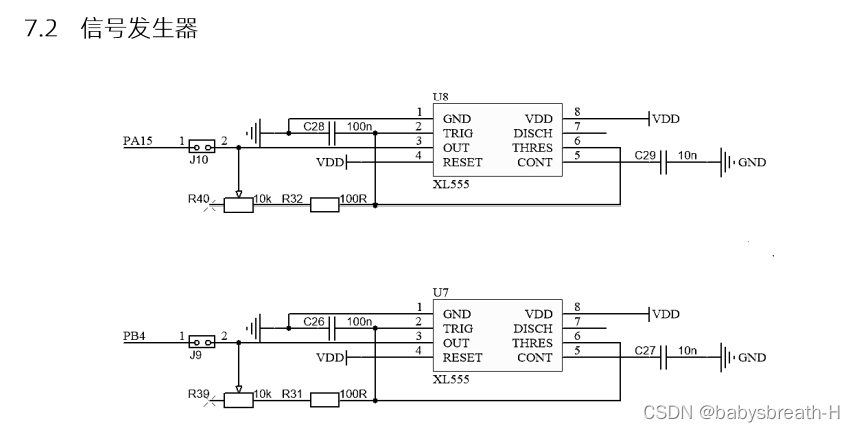
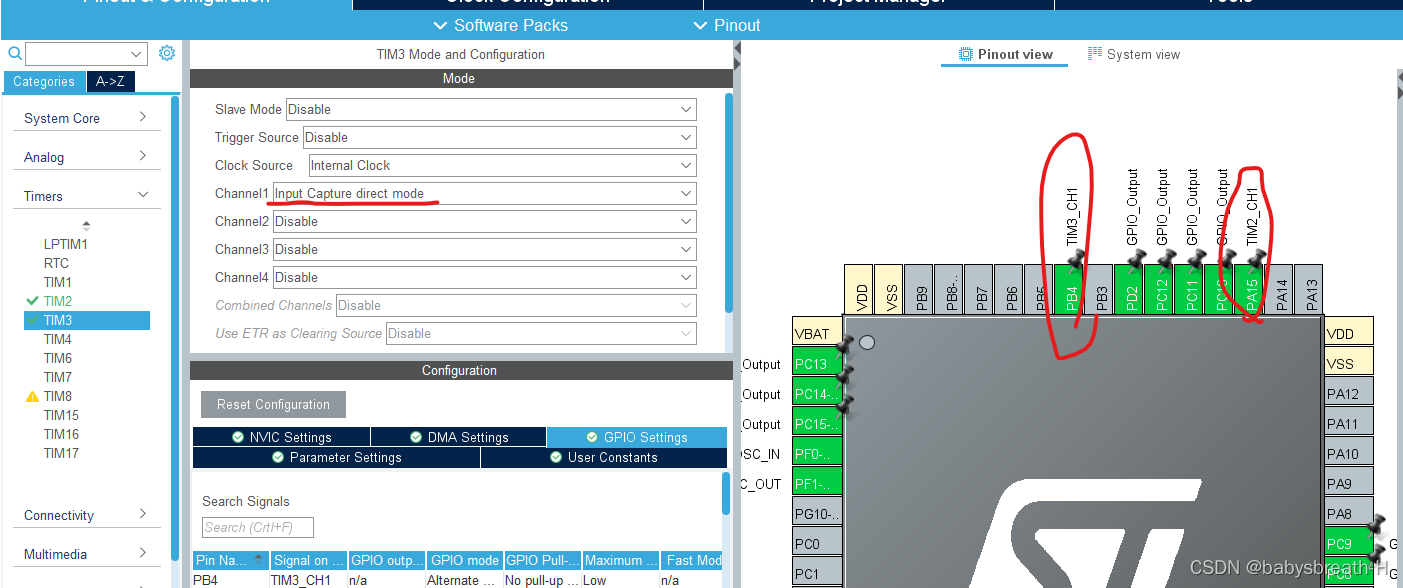
��ȡ����LCD������ʾR39��R40��λ�����Ƶ��ź�Դ��Ƶ��
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance==TIM3)
{
cc1_value = __HAL_TIM_GET_COUNTER(&htim3);
__HAL_TIM_SetCounter(&htim3,0);
f39 = 1000000/cc1_value;
HAL_TIM_IC_Start_IT(&htim3, TIM_CHANNEL_1);
}
else if(htim->Instance==TIM2)
{
cc2_value = __HAL_TIM_GET_COUNTER(&htim2);
__HAL_TIM_SetCounter(&htim2,0);
f40 = 1000000/cc2_value;
HAL_TIM_IC_Start_IT(&htim2, TIM_CHANNEL_1);
}
while (1)
{
sprintf((char*)str, " FRQ(R39):%dHz ",f39);
LCD_DisplayStringLine(Line8, (uint8_t *)str);
sprintf((char*)str, " FRQ(R40):%dHz ",f40);
LCD_DisplayStringLine(Line9, (uint8_t *)str);
HAL_Delay(200);
}
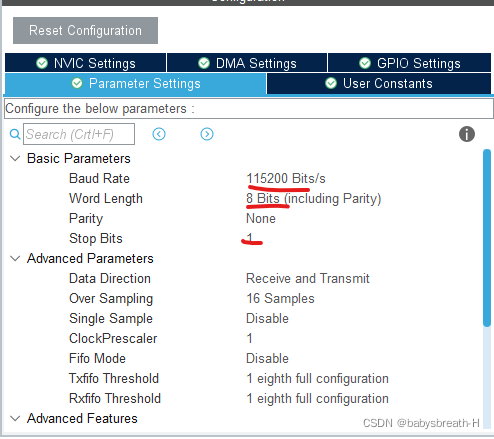
����ͨ��
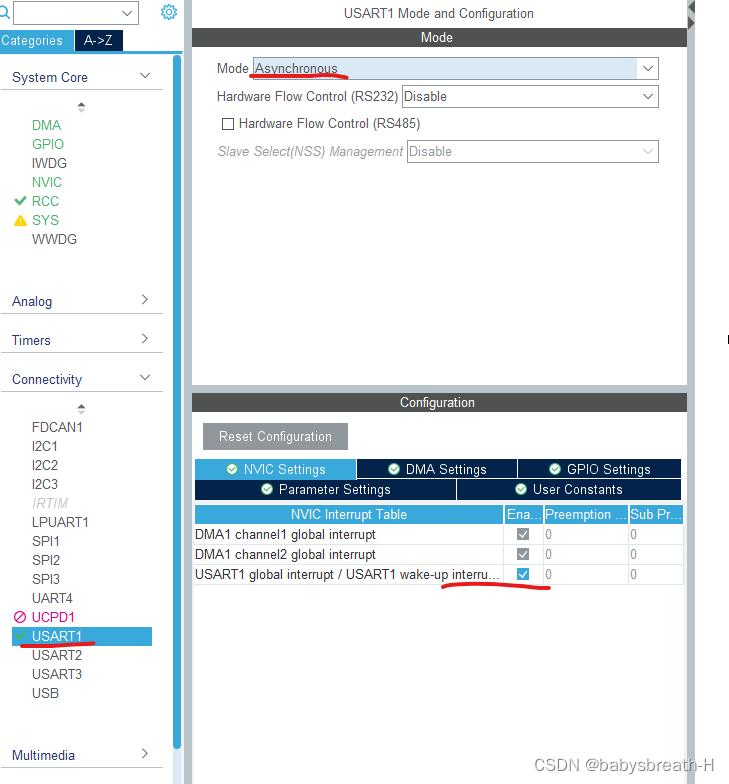
usart1��uart
��ʼ������
stm32cubeMX:
- ����ϵͳʱ��
- ���ô������� (PA9, PA10) ע��
- ���ô��ڲ���
- ʹ�ܴ����ж�
Keil:
- ���ڳ�ʼ��
- ��д�����շ�����
����ͨ�ŵ�Ӧ��
��
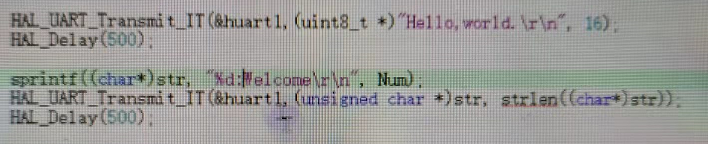
��
HAL_UART_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size) //���жϷ�ʽ�½���һ����������
�ص�����(������,�û������б�д,ʵ���ж���ִ�е�����������)
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
LCD_DisplayStringLine(Line8,(uint8_t*)(RX));
HAL_UART_Receive_IT(&huart1,(uint8_t*)RX,10);
}
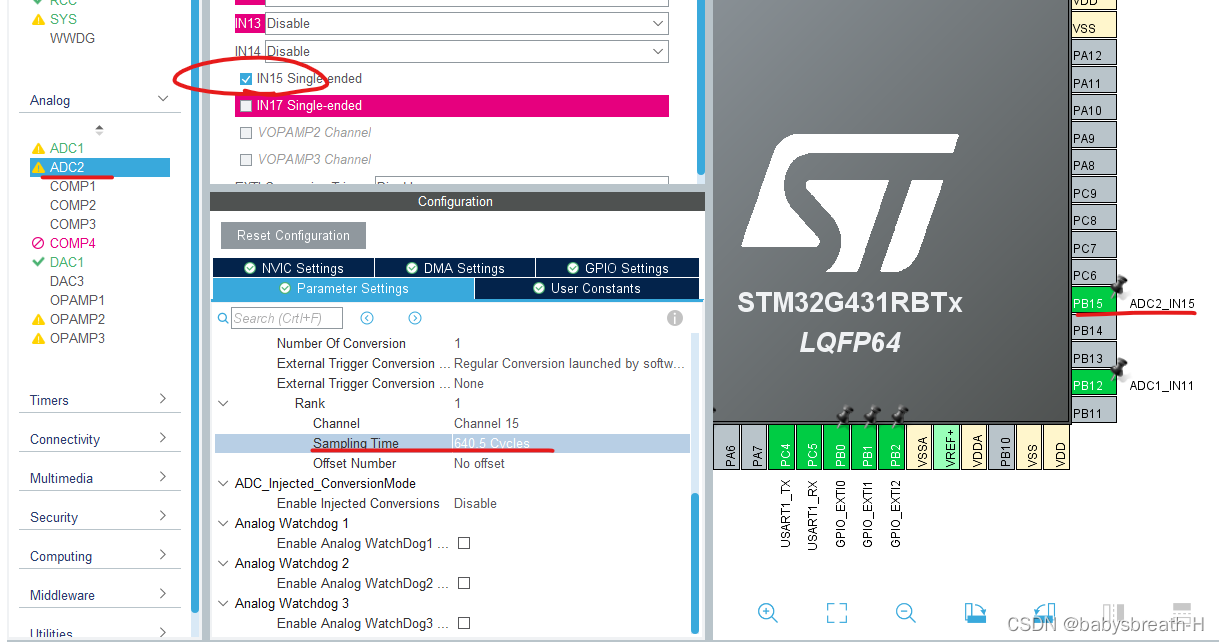
ADC��DAC
ADC��ʼ��
STM32cubeMX:
- ����ϵͳʱ��
- ����ADC����
- ʹ��ADC��Ӧͨ��ģʽ
- ����ADC����
(һ�㲻��Ҫ����ADC�ж�)
Keil:
ADC�������������ж��ҳ�ʼ����������STM32Cube����,������������
- ����ADCת�� HAL_ADC_Start()
ADCӦ��
�û���д
- HAL_ADC_PollForConversion(ADC_HandleTypeDef *hadc, uint32_t Timeout) �ȴ�ADCת����ʱ��
- HAL_ADC_GetValue(ADC_HandleTypeDef *hadc) ��ȡADC��ת�����
- ��ȡADC���ݲ���ʾ
uint16_t getADC_R38(void)
{
uint16_t adc=0;
HAL_ADC_Start(&hadc1);
HAL_ADC_PollForConversion(&hadc1, 10);
adc=HAL_ADC_GetValue(&hadc1);
HAL_ADC_Stop(&hadc1);
return adc;
}
sprintf((char *)str, " R38: %.2fV",getADC_R38()*3.3/4096);
LCD_DisplayStringLine(Line7,(uint8_t *)str);
HAL_Delay(100);
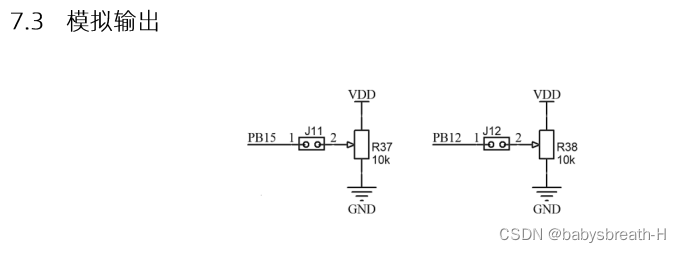
DAC��ʼ��
��չ����PA4, PA5֧��DAC���
STM32CubeMX����:
- ����ϵͳʱ��
- ѡ��DAC����
- ����DAC����
Keil: - DAC�������� HAL_DAC_Start(&hdac1, DAC_CHANNEL_1)
*
Ӧ��
- HAL_DAC_SetValue()����------->ʹ��ӦDACͨ������趨��ѹֵ
- �趨��ѹֵ
void DAC1_SET_Vol(float vol)
{
uint16_ttemp;
temp=(4096*vol/3.3f);
HAL_DAC_SetValue(&hdac1,DAC_CHANNEL_1,DAC_ALIGN_12B_R,temp);
}
DAC1_SET_Vol(1.2) ���1.2V��ѹ
DMA��ֱ�Ӵ洢������
����ʹ洢��֮��������ݴ���
DMA��ʼ��
STM32CubeMX:
- ����ϵͳʱ��
- ���ڳ�ʼ��
- ����DMA
- ����DMA����
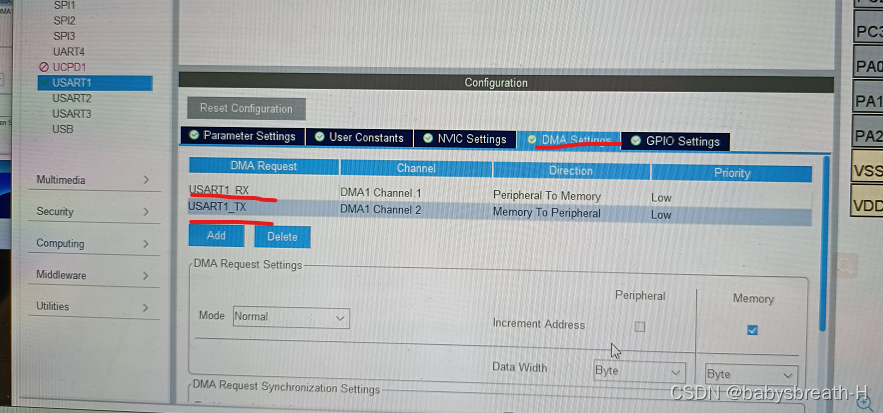
Keil:
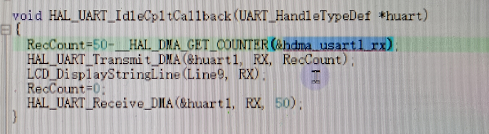
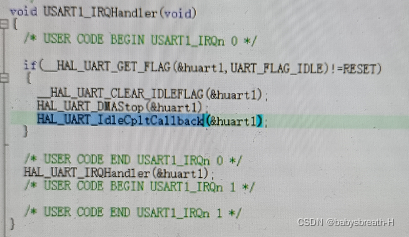
- ��дDMA�����շ��û�����
����һ������,������������
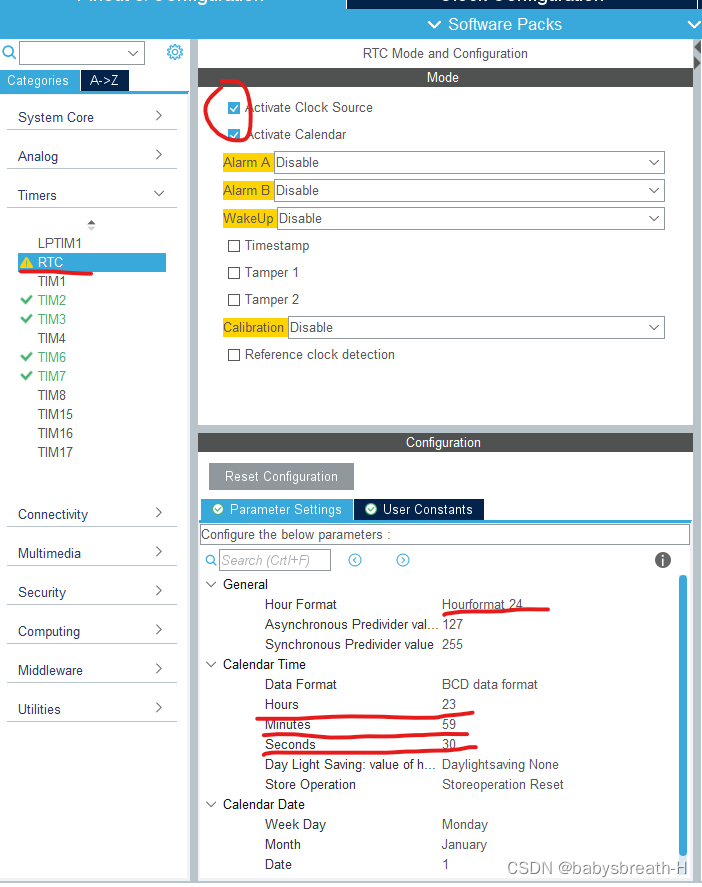
RTC�� ʵʱʱ��
RTC��ʼ��
STM32CubeMX:
- ���ú�ϵͳʱ��
- RTC��ʼ��(ʹ���ڲ�ʱ��)
- ����RTC��ʼ����
Keil:
- RTC��ʼ������
- ����RTC�û�����(��ȡRTC����)
HAL_RTC_GetTime(&hrtc, , ) /// HAL_RTC_GetDate(&hrtc, ) - ��дRTC�û�����(��������RTC����)
static void RTC_SetTime(uint8_t HH,uint8_t MM,uint8_t SS)
{
RTC_TimeTypeDef sTime = {0};
sTime.Hours = HH;
sTime.Minutes = MM;
sTime.Seconds = SS;
if (HAL_RTC_SetTime(&hrtc, &sTime, RTC_FORMAT_BIN) != HAL_OK)
{
Error_Handler();
}
}
Ӧ��
��LCD������ʾʱ��
static void RTC_CalendarShow(uint8_t *showtime, uint8_t *showdate)
{
RTC_DateTypeDef sdatestructureget;
RTC_TimeTypeDef stimestructureget;
/* Get the RTC current Time */
HAL_RTC_GetTime(&hrtc, &stimestructureget, RTC_FORMAT_BIN);
/* Get the RTC current Date */
HAL_RTC_GetDate(&hrtc, &sdatestructureget, RTC_FORMAT_BIN);
/* Display time Format : hh:mm:ss */
sprintf((char *)showtime, "%2d:%2d:%2d", stimestructureget.Hours, stimestructureget.Minutes, stimestructureget.Seconds);
LCD_DisplayStringLine(Line8, (uint8_t *)ShowTime);
/* Display date Format : mm-dd-yy */
sprintf((char *)showdate, "%2d-%2d-%2d", 2000 + sdatestructureget.Year,sdatestructureget.Month, sdatestructureget.Date);
LCD_DisplayStringLine(Line9, (uint8_t *)ShowDate);
}
����ʵ��֮��Դ��չ��
�����
��������ͼ
3������ܸ�����һ��74HC595��оƬ,�൱��һ��3λ����λ�Ĵ���
��ʼ������
STM32CubeMX:
- ����������������(PA1, PA2, PA3)Ϊ���ģʽ
- ���ɳ�ʼ�������ļ�
Keil: - ��������������
Ӳ����������
����������ܵ�ֵ
ADC����
��·ԭ��ͼ
cube����
Keil��д
- button.c ��button.h�ļ�,�������ṩ�κ���������,��Ҫ��д
DS18B20 �¶ȴ�����
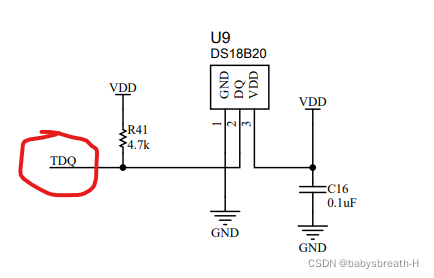
��ʼ��
STM32CubeMX: (�˴�Ҳ�ɲ����в���)
- ���ú�ϵͳʱ��
- ����ds18b20������Žӿ�(PA6)
- ���ɳ�ʼ�������ļ�
- ����LCD�ļ�
Keil: - ����IIC�������� ds18b20_hal.c ds18b20_hal.h����Ӧ���û��ļ���
- ��keil��������������ļ�
- ��дһ������
��������,ADC
��·ͼ,TRAO����