ʵ����Ŀ:STC-BSP ����API�������ۺ�����
ʵ��ʱ��:2022.3.7(��3����һ)~2022.3.20(��4������)
ʵ��ص�:�ڹ涨ʱ��������Ѱ�Һ���ʵ��ص㲢�ڹ涨ʱ�������
ʵ������:
1.STC-Bѧϰ��(2021���Сѧ��ÿ��ѧ���Լ�����)
2.���˵���:�Ա�
3.Keil��ISP��CH340��������:�Ա�
4.STC-BSP��Demo ����:��ʦ�ṩ
5.��STC_Bѧϰ�塱����֧�ְ�ʹ��˵��:��ʦ�ṩ
6.C51�����:�γ��ṩ�ο������鼮,��������ѧ
7.Demo1~Demo5Դ����:��ʦ�ṩ(Demo3Դ������ʵ��������ṩ)
8.Demo4��Ҫ��ֱ�����ģ��:��������C��215���̴���ʱ����
9.Demo5��Ҫ��485ͨ������:��������C��215���̴���ʱ����
ʵ��Ŀ��:
1.ѧϰ����ϤSTC-BSP(��STC-Bѧϰ�塱�弶��������֧�Ű�)����(ʵ��1��)����ģ������API��������ʹ��;
2.���ա��¼������¼��ġ��ص���������̻�����ʹ��;
3.��ʶ��STC-Bѧϰ�塱�еļ���ͨ�ŷ���,��Ϥ������ʹ��;
4.ѧϰ��STC-BSP֧����,���Ӧ�ó���
ʵ������:
1.�Ķ�����STC_Bѧϰ�塱����֧�ְ�ʹ��˵����������(ʵ��1��)����ģ��˵��,�Ķ�ʵ����ṩ��DemoԴ����(Demo1��2��4��5),��д�������ģ���ṩ�ĸ��������ͷ�������ʵ��1Ҫ����Ϥ��������ʹ�÷�����,��ʵ���ص��ǡ��¼������¼��ġ��ص�����������;
2.�Ķ�Demo5������������,��ͬѧ������֤Demo 5��ɵ�ͨ������������,ѧϰ���˽����ԭ��,��¼ʵ����̺�����
3.ʵ��2�ֳ���������:������д��һ�����ܡ�Ŀ�ĵ�Ӧ�ó���,����ʽ���ڡ�STC-Bѧϰ�塱��ʵ��;Ҫ��:��ͨ��(����1������2��485����Ir)��������������������
4.ѡ��:��ʶ����֤Demo3����(Demo3��ǰ���ṩ���ص�HEX�ļ�,�ο�Դ������ʵ����������ṩ),�ο�Demo2Դ��,���ܷ��д����ʵ��Demo3��ͬ���ܺ�Ч��?(ʵ����ӷ���,ѵ�����Ƕ��ʽӦ�ó���ʵ�ó����д����)
ʵ����̡����衢�����:
�Ķ��������µ�ģ��˵������������غ���
1,ADC.hģ��:
ADCģ�����ڡ�STC-Bѧϰ�塱����ADC��ص�·:�¶�Rt������Rop����������Nav����չ�ӿ�EXT�ϵ�ADCת�����ṩADCģ���ʼ��������2��Ӧ�ú���,2���¼���
��ʼ������:AdcInit(char ADCsel)
��������: ADCselѡ����չ�ӿ�EXT�Ƿ�����ADC����,ȡֵ��
ADCincEXT : ������չ�ӿ�EXT����ADC����(EXT��P1.0��P1.1����������IO����ʹ��)
ADCexpEXT : ��������չ�ӿ�EXT����ADC����(EXT��P1.0��P1.1��������IO����ʹ��)
ѡ��ǰ�߿���ʹ����չģ��,��������ʹ��
2��Ӧ�ú���:
struct_ADC GetADC():��ȡADCֵ��ADC�ṹ����Ϣ����:
typedef struct //ADCת�����
{ unsigned int EXT_P10; // ��չ�ӿ�EXT��P1.0��ADC(10bit)
unsigned int EXT_P11; // ��չ�ӿ�EXT��P1.1��ADC(10bit)
unsigned int Rt; // ����������ADC(10bit)
unsigned int Rop; // ����������ADC(10bit)
unsigned int Nav; // ����������ADC(10bit)
} struct_ADC;�����ڻ�ȡ��չģ������ݻ����ADC��ص�·������
char GetAdcNavAct(char Nav_button):��ȡ��������(����K3)״̬
��������:Nav_button:ָ��Ҫ��ȡ״̬�ĵ���������ȡֵ:
enumAdcNavKey3(K3��),
enumAdcNavKeyRight(�Ұ�),
enumAdcNavKeyDown(�°�),
enumAdcNavKeyCenter(����),
enumAdcNavKeyLeft(��),
enumAdcNavKeyUp(�ϰ�).
ע����ʹ��ADCģ���Keyģ���Key3��صĺ�����������ʹ��
�ṩ�������¼�Ϊ:
���������¼�:enumEventNav
����������5�������K3�����⡱���¡���̧�𡰶���ʱ,������һ�������������¼���enumEventNav����Ӧ���������¼����û��ص��������û���д,����sys�ṩ��SetEventCallBack()����������Ӧ����.
��չ�ӿ�EXT��P1.0��P1.1�����˿����µ�ADֵ�¼�:enumEventXADC
��ADCģ���P1.0��P1.1����ADCת��,����������µ�ADC���ʱ,������enumEventXADC�¼�,֪ͨ�û����д�������ӦenumEventXADC�¼����û��ص��������û���д,����sys�ṩ��SetEventCallBack()����������Ӧ����.
ADCģ���P1.0��P1.1����ADCת���ٶ�Ϊ3mS,Ҳ��ÿ3mS��ÿ����333��ת��.
�������ܲ���:
��ADCģ����¶�,��ǿ��Navֵ������������:

���Խ������:����3~6λ��ʾ��ǿ,������Ʒ�ڵ��ͷ���ǿ����ʱ�������Ӧ�����߽���,Nav��ֵ�����ǰ��²�ͬ�ĵ�����ʱ����ʾ��ͬ��ֵ,��Щֵ��Ӧ������ÿһ��������״̬��Ϣ,�¶Ȼ�û��ת�����϶�,Ŀǰ��ʾ�����ڵ�ADCֵΪ550����,�ڼ��Ⱥ�(����)����ֵ����

���������¼��Ļص�����:

�ڵ����������²�ͬλ��ʱ,Led�ƻ������������ʾ��Ӧλ�õ�LED�ơ����Խ������Ԥ��:

2.DS1302.hģ��:
DS1302ģ�����ڿ��ơ�STC-Bѧϰ�塱��DS1302оƬ������
DS1302�ṩRTC(ʵʱʱ��)��NVM(����ʧ�洢��)����(�ϵ��,RTC��NVM������Ŧ�۵��BATά�ֹ�����)������RTC�ṩ�ꡢ�¡��ա����ڡ�ʱ���֡��빦��;NVM�ṩ31 Bytes����ʧ�洢������(��ַΪ:0~30)��
���е�ַΪ30�ĵ�Ԫ��DS1302Init()�������ڼ��DS1302�Ƿ����,�û�����ʹ��
DS1302ģ�鹲�ṩ1������������4��Ӧ�ú���:
(1) void DS1302Init(struct_DS1302_RTC time):DS1302����������ʹ��DS1302,���øú�����ʼ��������һ��
��������:�ṹstruct_DS1302_RTC time
���DS1302����(��ʼ��ʱ���RTC����ʧЧ),���Բ���time�����ʱ���ʼ��RTC
(2)struct_DS1302_RTC RTC_Read(void):��ȡDS1302�ڲ�ʵʱʱ��RTC����
��������ֵ:�ṹstruct_DS1302(���ṹstruct_DS1302����)
(3)void RTC_Write(struct_DS1302_RTC time) :дDS1302�ڲ�ʵʱʱ��RTC����
��������:�ṹstruct_DS1302 time(���ṹstruct_DS1302����)
(4)unsigned char NVM_Read(unsigned char NVM_addr): ��ȡNVMһ��ָ����ַ����
��������:
NVM_addr:ָ������ʧ�洢��Ԫ��ַ,��Чֵ0~30(��31����Ԫ)
��������ֵ:��������������ʱ,����NVM�ж�Ӧ��Ԫ�Ĵ洢��ֵ(1Byte)
��������������ʱ,����enumDS1302_error
(5)unsigned char NVM_Write(unsigned char NVM_addr, unsigned char NVM_data):��NVMһ��ָ����ַд����ֵ
��������:NVM_addr:ָ������ʧ�洢��Ԫ��ַ,��Чֵ:0~30(��31����Ԫ��
NVM_data:��д��NVM��Ԫ����ֵ(1Byte)
��������ֵ:��������������ʱ,����enumDS1302_OK
��������������ʱ,����enumDS1302_error
�ṹstruct_DS1302_RTC����:
typedef struct
{ unsigned char second; //��(BCD��,���¾�ΪBCD��)
unsigned char minute; //��
unsigned char hour; //ʱ
unsigned char day; //��
unsigned char month; //��
unsigned char week; //����
unsigned char year; //��
} struct_DS1302_RTC;
BCD��Ϊ2����ʮ����,����˵����4λ�Ķ�������˵,ֻ����00001001���������������������BCD�뼴ֻ��ʾ010������a~f�����б�ʾ
���Ժ���:

��ʼ������ͼ��ʾ,�����������,���°������ڷ����仯,ͬ����������������ı�

���Է����洢��:

��ʼ���:�ϵ�������� ���°���������ͼ:�ϵ��������

3.EXT.hģ��
EXTģ�����ڿ��ơ�STC-Bѧϰ�塱����չ�ӿ�EXT����ز�����
EXTģ�����Ӧ����Ҫ,�������Ӧģ�����,��ʵ�ֶ�����Ӧ���ܡ������ṩ����Ӧ��������API������
EXTģ�������ṩ1���������������ɸ�Ӧ�ò�API������
EXTģ���API��������ͬʱ��Ч��,���Ǹ��ݳ�ʼ������������ͬ���ֱ���Ч��
����enumEXTWeight()����:

��ʾ�������:��ʼֵ����Ϊ0,������Ϊ��������û�н�������궨�Ĺ���
���Ժ�����Ҫʹ�ø�ģ�黹��Ҫ���б궨������

����enumEXTPWM����:

Ч��Ϊ��pwm1��pwm2���20������ʱ����������ת,��pwm1>pwm2 ʱ��ʱ����ת,��֮˳ʱ����ת
����enumEXTDecode

ʵ��������˳ʱ�����ʱ��,ֻҪ�ı���ת�Ƕȶ�����ʾ��ֵ,������תʱ��ʾ0��
����enumEXTUltraSonic���������

���Խ����ͼ�ܹ���ȷ��ʾ������ģ�鵽�ϰ���ľ���

4.Hall.hģ��
Hallģ�����ڻ�ȡ��STC-Bѧϰ�塱��hall������״̬��hallģ�鹲�ṩ1�����غ�����1��Ӧ�ú���,һ��Hall�¼�:enumEventHall
(1)HallInit():hallģ���ʼ������
(2)unsigned char GetHallAct(void):��ȡhall�¼���
��������ֵ:
enumHallNull(�ޱ仯)
enumHallGetClose(�ų��ӽ�)
enumHallGetAway(�ų��뿪)
��ѯһ�κ�,�¼�ֵ���enumEventHall (����ѯһ����Ч)
(3)hall�������¼�:
��Hall����"�ų��ӽ�"��"�ų��뿪"�¼�ʱ,������һ��Hall�������¼�(enumEventHall).��Ӧ�¼����û������������û���д, ����sys���ṩ��SetEventCallBack()���������¼���Ӧ����.
���Ժ���:
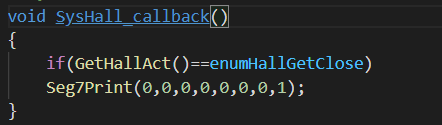
ʵ����:��������ʱ����ܻ���ʾ1,��ʼ�����ʾ0
5.IR.hģ��
IRģ�����ڿ��ơ�STC-Bѧϰ�塱�Ϻ��ⷢ������տ���,֧��PWM��PPM�������Э��ķ���,PWM�������Ľ���,��������������ң����������ͨ�ŵȡ�
IRģ���ṩ1������������5��APIӦ�ú�����1����������¼�(enumEventIrRxd:����Ir���յ�һ�����ݰ�)��
IRģ���Ѳ��봮��ͨ��(uart��uart2)��ͻ,����������ͬʱ������(��ǰ��ͻ)
API����:
(1) void IrInit(unsigned char Protocol):IRģ���ʼ��������
��������:unsigned char Protocol,�������Э�顣
Protocol �ݽ��ṩȡֵ:NEC_R05d(�������Э�����ʱ��Ƭʱ�� = 13.1Protocol uS)
(2) char IrTxdSet(unsigned char pt,unsigned char num):�����ɱ��뷽ʽ����IR����:�����ڱ�д�������Э��ĺ��ⷢ��,����ֵ�������ң������
��������:unsigned char pt,ָ������ͺ���������ݵ���ַ�������������:
��i���ⷢ��ʱ��,��i���ⷢ��ֹͣʱ�� //��λ:Э�����ʱ��Ƭ�ĸ���ֵ,���255���統Э�����ʱ��ƬΪ0.56mSʱ,��ֵ1����0.56mSʱ��,3����1.68mSʱ��
unsigned char num,�����ͺ���������ݵĴ�С(�ֽ���)
��������ֵ:enumIrTxOK:���óɹ�,�����趨�ķ������ݰ������ѱ�ϵͳsys��ȷ����,sys����Ӳ����Դ�����ܼ�ʱ�������ݡ�
enumIrTxFailure:����ʧ��(��Ҫԭ����:���ⷢ����æ(��һ���ݰ�δ����)����������ڽ���һ�����ݰ�������
(3) char IrPrint(void pt, unsigned char num)://��NEC��PWM���뷽ʽ��������,�����ڷ��ϸú�������ʽ�IJ��ֵ���ң����;��GetIrRxNum()��SetIrRxd()���,�ɽ��к���˫��ͨ��;��
//���ⷢ�����ݸ�ʽΪ:������:��(16����ʱ��Ƭ),ͣ(8����ʱ��Ƭ)��0.56mSʱ:��9mS��ͣ4.5mS
���ݱ���:��0�� �C ��(1����ʱ��Ƭ),ͣ(1����ʱ��Ƭ)
��1�� �C ��(1����ʱ��Ƭ),ͣ(3����ʱ��Ƭ) �ȷ���λ����λ
������:��(1����ʱ��Ƭ),ͣ(1����ʱ��Ƭ)
//����������,�ú����ӱ����õ����ش�Լ1uS����ʱ��,����ָ�������ݾ����ⷢ���������Ҫ�ϳ�ʱ��(ÿ�ֽڴ�Լ��Ҫ10mS����ʱ��)��
��������:void *pt :ָ���������ݰ�λ��(���ݰ����������롢��������Ϣ,�������͵���Ч����)
unsigned char num:�������ݰ���С(�ֽ���,���������롢������)
��������ֵ:enumIrTxOK:���óɹ�,�����趨�ķ������ݰ������ѱ�ϵͳsys��ȷ����,sys����Ӳ����Դ�����ܼ�ʱ�������ݡ�
enumIrTxFailure:����ʧ��(��Ҫԭ����:���ⷢ����æ(��һ���ݰ�δ����)����������ڽ���һ�����ݰ�������(ͬIrTxdSet()��������ֵ)
(4) void SetIrRxd(void *RxdPt,unsigned char RxdNmax):���ú���������ݰ����λ�á�ÿ�����ݰ�����ֽ����� �յ�һ�����ݰ�(����1�ֽ�����)ʱ������numEventIrRxd�¼���������IrPrint()�������,��ʵ�ֺ�������ͨ��
��������: void char *RxdPt:ָ���������ݰ������(��ַ)
unsigned char RxdNmax:ָ��ÿ�����ݰ���������ֽ�����������������ֽ�������,�������ֽ������ԡ���ֵ����������ݰ����ֵ,���ⳬ����Ӱ�������������
(5) unsigned char GetIrRxNum(void):��ȡ�յ��ĺ���������ݰ�ʵ���ֽ�������SetIrRxd()���,��ʵ�ֺ������ݰ����ա�(����Ӧʹ��IrPrint()�����������ݰ�)
����ȡֵ <= Ir���ջ���������ֽ���(RxdNmax����)�����ʵ�ʺ������ݰ��ֽ�������RxdNmax,�յ��Ķ����ֽ����������洢(Ҳ�����м���)
��������ֵ:����������ݰ���С(�ֽ���)��
���յ�һ�����ݰ���numEventIrRxd�¼�������,���øú�����ȡ����������ݰ��Ĵ�С(�ֽ���)������ʱ�����,��ֵ��ȷ��
(6)char GetIrStatus(void): ��ȡIr״̬
��������ֵ:enumIrFree:�������
enumIrBusy:������æ(���ڷ������ݰ�,�����ڽ������ݰ�)
(7)��������¼�enumEventIrRxd:����Ir���յ�һ�����ϸ�ʽ�����ݰ�(�����ʽ��IrPrint()����˵��)������������ݰ�ʵ���ֽ�������Ir���ջ���������ֽ���(RxdNmax����),Ҳ���յ����ݰ������������enumEventIrRxd�¼�
���Ժ���:

���Խ����ͼ,������Key1���յ������źź�,������ϵ����ּ�һ��
6.M24C02.hģ��
M24C02ģ�����ڿ��ơ�STC-Bѧϰ�塱��IIC�ӿڵķ���ʧ�洢��(NVM)M24C02оƬ������
M24C02�ṩ2K bits(256 Bytes)����ʧ�洢��(NVM)����(����ʧ�洢����Ԫ��ַΪ:00~0xff)��
M24C0402ģ�鹲�ṩ2��Ӧ�ú���(��ģ�鲻��Ҫ��ʼ��)
(1)unsigned char M24C02_Read(unsigned char NVM_addr): ��ȡM24C02һ��ָ����ַ����
��������: NVM_addr:ָ������ʧ�洢��Ԫ��ַ,��Чֵ00~0xff(��256����Ԫ)
��������ֵ:����M24C02�ж�Ӧ��Ԫ�Ĵ洢��ֵ(1Byte)
(2)void M24C02_Write(unsigned char NVM_addr, unsigned char NVM_data):��M24C02һ��ָ����ַд����ֵ
��������:
NVM_addr:ָ������ʧ�洢��Ԫ��ַ,��Чֵ:00~0xff(��256����Ԫ)
NVM_data:��д��M24C02��Ԫ����ֵ(1Byte)
����˵��:
M24C02Ϊ����ʧ�Դ洢��,����Ҫ�ص���:�洢�������ڶϵ���ܼ�������,һ�����ڱ���ϵ��豣���Ĺ���ϵͳ����;
������дM24C02�ڲ�ÿһ���ֽھ���Ҫ����һ��ʱ��(ÿ�ζ�д������Լ��ʮuS,д����Ϊ5~10mS),���С�д����������(ÿһ��Ԫ��Լ��д������Ϊ10�����������);
��DS1302�ڲ�NVM����:������(M24C02�ṩ256�ֽ�,M24CXXϵ�������ṩ64K�ֽ�),���С�д����������(һ��Ϊ��ʮ��Ρ�д��������,��д���ڳ�(5~10mS)���,����д����֮������5~10mS����;
ʵ��Ч����DS1302���ƶ������������籣��Ч��
7.StepMotor.hģ��
StepMotor����STC-B����Ʋ�����������ṩ1������������3��Ӧ�ú���:(1)StepMotorInit():�������ģ����������
(2)SetStepMotor(char StepMotor,unsigned char speed ,int steps ) ָ�������������ָ��ת���ٶȡ�ת��ָ����
��������:StepMotor ָ���������,ȡֵ(enum StepMotorName�ж���)
enumStepMotor1: SM �ӿ��ϵIJ������
enumStepMotor2: ��ʱ,��L0~L3�ĸ�LEDģ��һ��4�ಽ�����
enumStepMotor3: ��ʱ,��L4~L7�ĸ�LEDģ��һ��4�ಽ�����
Speed:�������ת���ٶ�(0~255),��λ:��/S�� (ʵ��ÿ��ʱ��=int(1000mS/speed) mS),�������ٶȿ��ܴ���һ�����
Step:�������ת������(-32768~32767),��ֵ��ʾ��ת
��������:enumSetStepMotorOK: ���óɹ�(enum StepMotorActName�ж���)
numSetStepMotorFail:����ʧ��(���������ָ����Χ,��speed=0,�����ʱ����ת��)
(3)EmStop(char StepMotor) ����ָֹͣ���������ת��
��������:StepMotor ָ����������������������Խ�����0ֵ��
��������:ʣ��δת��IJ���
(4)GetStepMotorStatus(char StepMotor) ��ȡָ���������״̬
��������:StepMotor ָ���������
��������:enumStepMotorFree:����(enum StepMotorActName���)
enumStepMotorBusy,æ(����ת��)
enumSetStepMotorFail:����ʧ��(�������������ָ����Χ)

ʵ��Ч��:�����ʱ��ת��(�����ٶ�Ϊ200��ת�ٿ��������Ǻ���)
8.Uart2.h
Uart2ģ���ṩUart2ģ���ʼ��������3��Ӧ�ú���,1���¼�(enumUart2EventRxd):
(1) Uart2Init(unsigned long band,unsigned char Uart2mode):Uart2ģ���ʼ��������
��������:unsigned long band:���崮��2��ͨ�Ų�����(��λ:bps)(�̶�8������λ��1��ֹͣλ,����żУ��λ)
unsigned char Uart2mode:���崮��2λ��
ȡֵ:Uart2UsedforEXT ���� ����2��EXT��չ������
Uart2Usedfor485 ���� ����2����485ͨ��(��˫�����������ݰ�ʱ���ܽ�������)
(2) void SetUart2Rxd(char *RxdPt, unsigned int Nmax, char *matchhead, unsigned int matchheadsize);
���ô���2���ղ���:���ݰ����λ�á���С,��ͷƥ���ַ���ƥ���ַ��������յ��������������ݰ�ʱ������enumEventRxd�¼���
��������: char *RxdPt:ָ���������ݰ������(��ַ)
unsigned int Nmax:�������ݰ���С(�ֽ���),���65535
char matchhead: ��Ҫƥ������ݰ�ͷ(��ַ)
unsigned int matchheadsize:��Ҫƥ����ֽ���
����˵��:
Nmax=1:Ϊ���ֽڽ���,���յ�һ���ֽھͲ���enumEventUart2Rxd�¼�(���������ƥ��,��������ƥ������);
0 < matchheadsize < Nmax:Ҫ���������������matchheadsize���ֽ���matchhead��������ȫƥ��,�����յ�Nmax����ʱ����enumEventRxd�¼�;
matchheadsize = Nmax:�趨�������ݰ���ȫƥ��
matchheadsize=0 �� matchheadsize > Nmax:������ƥ��,���յ�����Nmax����ʱ����enumEventRxd�¼�;
��enumEventRxd�¼�������,���յ������ݰ�Ӧ��ʱʹ�û�ȡ��,�յ���һ������ʱ���ƻ�����ǰ���յ������ݰ�
(3)char Uart2Print(void *pt, unsigned int num):�������ݰ�,����������(���������ȵ����趨����ȫ����ɲŷ���),�ú����ӱ����õ����ش�Լ1uS����ʱ�䡣
��������: void *pt :ָ���������ݰ�λ��
unsigned int num:�������ݰ���С;
��������ֵ:enumTxOK:���óɹ�,�����趨�ķ������ݰ������ѱ�ϵͳsys��ȷ����,sys����Ӳ����Դ�����ܼ�ʱ�������ݡ�
enumTxFailure:����ʧ��(��Ҫԭ����:������æ(��һ���ݰ�δ����)
����˵��:�����Ϸ���1���ֽ����ݴ�Լ��Ҫʱ��0.1mS~10mS(�����趨�IJ�����)��
(4)char GetUart2TxStatus(void): ��ȡUart2����״̬
��������ֵ:enumUart2TxFree:����2���Ϳ���
enumUart2TxBusy,����2������æ
(5) Uart2�����¼�:enumUart2EventRxd����ʾ�յ���һ������ָ��Ҫ��(���ݰ�ͷƥ�䡢���ݰ���Сһ��)�����ݰ���
����˵��:����(1��2)���յ����������ݰ�֮ʱ����Ҫ��С��1mS(ԭ��:ϵͳ�ڲ����ȷ�������)
���Ժ���:��������IJ���:

��ɳ�ʼ����Ϳ��Խ��յ�����ģ����������
����485����µĴ���:

��Key1���º�Է��İ�������������ֻ��һ,ʵ����:

9.Uart1.hģ��
Uart1ģ���ṩUart1ģ���ʼ��������3��Ӧ�ú���,1���¼�(enumEventRxd):
(1) Uart1Init(unsigned long band):Uart1ģ���ʼ��������
��������:unsigned long band���崮��1��ͨ�Ų�����(��λ:bps)(8������λ��1��ֹͣλ,����żУ��λ)
��������ֵ:��
(2) void SetUart1Rxd(char *RxdPt, unsigned int Nmax, char *matchhead, unsigned int matchheadsize);
���ô���1���ղ���:���ݰ����λ�á���С,��ͷƥ���ַ���ƥ���ַ��������յ��������������ݰ�ʱ������enumEventRxd�¼���
��������: char *RxdPt:ָ���������ݰ������(��ַ)
unsigned int Nmax:�������ݰ���С(�ֽ���),���65535
char matchhead: ��Ҫƥ������ݰ�ͷ(��ַ)
unsigned int matchheadsize:��Ҫƥ����ֽ���
����˵��:
Nmax=1:Ϊ���ֽڽ���,���յ�һ���ֽھͲ���enumUart1EventRxd�¼�(���������ƥ��,��������ƥ������);
0 < matchheadsize < Nmax:Ҫ���������������matchheadsize���ֽ���matchhead��������ȫƥ��,�����յ�Nmax����ʱ����enumEventRxd�¼�;
matchheadsize = Nmax:�趨�������ݰ���ȫƥ��
matchheadsize=0 �� matchheadsize > Nmax:������ƥ��,���յ�����Nmax����ʱ����enumEventRxd�¼�;
��enumEventRxd�¼�������,���յ������ݰ�Ӧ��ʱʹ�û�ȡ��,�յ���һ������ʱ���ƻ�����ǰ���յ������ݰ�
��������ֵ:��
(3)char Uart1Print(void *pt, unsigned int num):�������ݰ�,����������(���������ȵ����趨����ȫ����ɲŷ���),�ú����ӱ����õ����ش�Լ1uS����ʱ�䡣
��������: void *pt :ָ���������ݰ�λ��
unsigned int num:�������ݰ���С;
��������ֵ:enumTxOK:���óɹ�,�����趨�ķ������ݰ������ѱ�ϵͳsys��ȷ����,sys����Ӳ����Դ�����ܼ�ʱ�������ݡ�
enumTxFailure:����ʧ��(��Ҫԭ����:������æ(��һ���ݰ�δ����)
����˵��:�����Ϸ���1���ֽ����ݴ�Լ��Ҫʱ��0.1mS~10mS(�����趨�IJ�����)��
(4)char GetUart1TxStatus(void): ��ȡUart1����״̬
��������ֵ:enumUart1TxFree:����1���Ϳ���
enumUart1TxBusy,����1������æ
(5) Uart1�����¼�:enumEventUart1Rxd����ʾ�յ���һ������ָ��Ҫ��(���ݰ�ͷƥ�䡢���ݰ���Сһ��)�����ݰ���
����˵��:����(1��2)���յ����������ݰ�֮ʱ����Ҫ��С��1mS(ԭ��:ϵͳ�ڲ����ȷ�������)
���Ժ���:

���°�����,���ԿɴӴ���(��ʼ��ʱ������Ҫ�봮������һ��)�õ�1,1,1,1,1,1������(6��1�Ƿ������ݵ�ַ�е�����)
�����ȴ��ڷ������ݺ���ӽ��յ���Ϣ���ص�����,����������ܵ����ּ�һ��
ʵ��Ч��:

10.Vib.hģ��
Vib���ڻ�ȡ"STC-Bѧϰ��"��Vib������״̬.�ṩһ��ģ����غ�����һ��Ӧ�ú���,һ��Vib�¼�enumEventVib:
(1)VibInit():������Vibģ���ʼ������;
(2)char GetVibAct():��ȡVib�¼���
��������ֵ:���ص�ǰVib�������¼�,����ֵ:enumVibNull������,enumVibQuake������������
��ѯһ�κ�,�¼�ֵ��� enumVibNull (����ѯһ����Ч)
(3)Vib�������¼�enumEventVib:
��Vib���С����¼�ʱ,������һ�������¼���,��Ӧ�¼����û������������û���д,
����sys���ṩ��SetEventCallBack()��������.
���Ժ���:
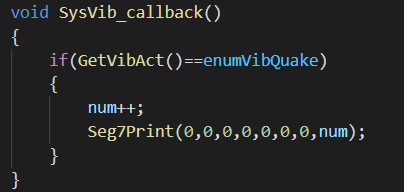
������ÿ��һ��,������ϵ����ּ�һ
ʵ��Ч��:ÿ����ʱ���ּ�һ(��ʱ���ȶ����2)

�Ķ�ʵ����ṩ��DemoԴ����(Demo1��2��4��5)
1,Demo1:Demo1��Ҫ����:

�ûص�����ʹ��GetADC(),��ȡ�¶�,��ǿ������ֵ,Ȼ�����еĹ���ǿ�Ƚ���������������,Ȼ������ж������ǿ����50�ͻὫLED��ߵĵƵ�������������,С��20ʱ��LED�ұߵĵƵ�������������,��������Ƶ�ʽ�С
2,Demo2:Demo2��Ҫ����:
�����ص�����,�����ص�����ͨ����ⰴ��1�Ͱ���3�İ�����������Եı�־λ�ı�,�����־λΪ0,���º�(�൱�ڴ�ʱ��ʼ��ʱ)�Ὣǰ��ļ�������,������ͬʱ�ᷢ����ʱ��ص����������ٱ�־λΪ1ʱ,ÿ�ε���ʱ��ص�����ʱ���м�����һ,�������������ʾ��������ϡ�
3,Demo4:Demo4��Ҫ����:

����Ҫ����ʹ��SetPWM()API��������ָ��ռ�ձȺ�Ƶ�ʵ����ݿ��Ƶ��������ת,���°��������ͨ���ı�ռ�ձ������Ƶ����ת��ʱ��ص����������SetPWM()������(ͨ����ռ�ձȽ��н��������������źŵ�����Ƶ���෴�Ĺ���,�Ӷ�ʹ����淴����ת)ͬʱ�����ռ�ձ������������ϡ�
4,Demo5:Demo5��Ҫ����:

����ʱͨ����У�����м���myID����,��ȷ���������ӿ���ȷ��Ŀ����ӷ�������,���ݵ����ȡ�����еĺ���λ(ǰ3λΪУ����)�ֱ�Ϊ��ת������ٶ�
Ȼ��ͨ��ʱ��ص����������������������ɽ��ռ���������Ӧ�õ������,ͬʱ�ڱ��ذ�˿���ͨ��key1�������ı�dir�Ӷ����������ת�ķ���
�Ķ�Demo5������������,��ͬѧ������֤Demo 5��ɵ�ͨ������������,ѧϰ���˽����ԭ��,��¼ʵ����̺�����
��Demo5�н���۽ڵ������¼��һ�����������������,485�Ĵ�����¼����һ�������С�����ڴ���1����������aa 55 01 01 40 00,��ô��۽ڵ��ת��������2,485ͨ����,���������������һ�¡�
�����ͼ��ʾ:����û�е�������ݽ����ʾ���������,�ڶ��������ֻ���ڴ���1�������н���3���ֽڸ�Ϊ02����


�������:��ID��Ϊ0x82,��۽ڵ�Ὣ����ת����������з���,�����ͼ��ʾ��ʾ
����001��

������д��һ�����ܡ�Ŀ�ĵ�Ӧ�ó���,����ʽ���ڡ�STC-Bѧϰ�塱��ʵ��;
���ܰ���:
����һ�� �����ϵ�key1����һ�����յ��������źŵİ���,ͨ���жϷ��͵������Ƿ���ȷ(ȫΪ1)�����ȷ��������ϵ����ּ�һ
ʵ��Ч��:һ�����Ӱ���5��key1��һ������3��

��Ϊ���ӹ��ܰ���:
��ѧϰ���ϰ���key3Ϊ�л�����������ģʽ,��ʼΪ����ģʽ,�ڵ����������Ϸ��ʼ��������ͼ:


�˽���Ϊ��Ϸ�����ұߵ�7�������Ϊ�ϴ���Ϸ���÷��������ʼΪ0,����ߵ��������ʾ���ǡ�ƴͼ��Ƭ��,����Ϸ��ʼʱ����ͼ��ͼ��ʾͨ���������������¿��Բ�������ߵġ�ƴͼ��Ƭ��ͬʱ����������һ��ȱһ�ǵġ�ͼƬ������ߵ�ƴͼ��Ƭ���ұߵ�ͼ�κ���һ��ǡ���γ�һ����С���������8ʱ(��������ǡ�������ȫ����)���һ��,��������Ϸ,����Ϸ�а���key1����ͣ��Ϸ,��ʱ������ϻع̶����ƴͼ��Ƭͬʱ���Ҳ���ʾ��Ŀǰ�ĵ÷�,�ٴΰ���key1����Լ�����Ϸ(��ʱ�ᴥ����Ϸ��ͣ�ͷ�ͼ�λ���ǰ��һ��)����ʧ����ѧϰ�巢������������Ϸ����,���Ҳ���ʾ������Ϸ�ĵ÷�(����ͼ)��(����ͣʱ������Ƶ���ʱkey1����ʼ��Ϸ),����Ϸ�κ�ʱ����key2�������¿�ʼ��Ϸ(���������0)��

����Ϸ����ʱ������Ϸ�÷ֵ�����,ͼ���ƶ��ٶ�Ҳ������,�÷�ÿ��5����Ϸ�ٶȻ���һ�����5����
��Ϸ�κ�ʱ����key3�л�ģʽ,�л�������ģʽʱ,������ģʽ��˫����ʼ״̬����

����������ʾΪ˫��Ŀǰ�ĵ÷�,�ұߵ���������ܿ�����������ʾ�������õ��Ѷȵȼ�,���ұߵ��������ʾ���ǶԷ���һ����Ϸʱ����ֵ�ͼ�Ρ���ʱͨ��key1,key2���Զ��ѶȺ�ͼ�ν�������,������ɺ����°��µ�������,��ʱ�Է�������Ϸ,���ֵ��ѶȺ�ͼ�����Լ�����һ��,�����Ѷ�Խ�߶Է��ɹ�ƴͼ��÷�ҲԽ��,�Է���ʧ����ѧϰ�巢�����������Է���Ϸ����
�Է���ʱ�����ٽ�����Ϸ�÷ֵ����Լ��������ѶȺ�ͼ�η���,��˫����Ҿ�ʧ�ܺ�÷ָߵ���һᲥ��ʤ������,��������ͬ��˫�����������֡��������ֹ����лŽ������������¿�ʼ��Ϸ,��һ���κ�һ�����¿�ʼ��Ϸ˫��������������Ȼ�����¿�ʼ��Ϸ��
���̴���:
#include "STC15F2K60S2.H" //���롣
#include "sys.H" //���롣
#include "displayer.H" //��ѡ,���ʹ����ʾģ��
#include "Key.H" //��ѡ,���ʹ�ð���ģ��
#include "beep.h" //��ѡ,���ʹ�÷�����ģ��
#include "music.h" //��ѡ,���ʹ�����ֲ��Ź���
#include "ADC.h" //��ѡ,���ʹ��ADCģ��(��EXT��ADC)
#include "uart2.h" //��ѡ,���ʹ�ô���2ͨ��(485ͨ�š���EXT�ϴ���)
code unsigned long SysClock=11059200; //���롣����ϵͳ����ʱ��Ƶ��(Hz),�û������ij���ʵ�ʹ���Ƶ��(����ʱѡ���)һ��
#ifdef _displayer_H_ //��ʾģ��ѡ��ʱ���롣(�������ʾ�����,�Ñ����ġ����ӵ�)
//******* �û������2:�û��Զ��庯������ *************//
#ifdef _displayer_H_ //��ʾģ��ѡ��ʱ���롣(�������ʾ�����,�Ñ����ġ����ӵ�)
code char decode_table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x00,0x08,0x40,0x01, 0x41, 0x48,
/* ���: 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 */
/* ��ʾ: 0 1 2 3 4 5 6 7 8 9 (��) ��- ��- ��- ����- ����- */
0x3f|0x80,0x06|0x80,0x5b|0x80,0x4f|0x80,0x66|0x80,0x6d|0x80,0x7d|0x80,0x07|0x80,0x7f|0x80,0x6f|0x80,
/* ������ 0 1 2 3 4 5 6 7 8 9 */
0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,~0xbf,~0xdf,~0xef,~0xf7,~0xfb,~0xfd,~0xfe};
//******* �û������3:�û�����ȫ�ֱ������� *************//
#include "song.c" //������song.c�б�д������(�質���)����
unsigned char d[8] = {33, 0, 0, 0, 0, 0, 0, 0};
int score1 = 0, score2 = 0;
char format, flag, fin, flag2, diff = 1; //0 alone 1 togater 0 start 1 end
unsigned char OK = 1, OK2 = 1; //����ģʽ�ж��Ƿ���� 1û�� 0����
//flag2 0 ���ڷ���� 1������Ϸ��
char disp = 26;
unsigned char datao[7]; //������ͨ��(����1������2�������)������8�ֽ�
unsigned char datahead[2] = {0xaa, 0x55}; //У��λ
char loc = 7, val7 = 26, val6 = 1;
int time = 0;
int delay = 100;
char normal = 0; //0 ��������״̬ 1 �쳣����״̬
char First=1;
void updatadisp() //��ʾ���º���
{
Seg7Print(d[0], d[1], d[2], d[3], d[4], d[5], d[6], d[7]);
}
void PlayGame() //����Ϸ
{
int mid = score1;
int i;
if (flag == 1) //��Ϸ������
{
for (i = 0; i < 7; i++)
{
d[7 - i] = (char)(mid % 10);
mid = mid / 10;
}
}
if (flag == 0)
{
for (i = 1; i < 8; i++)
d[i] = 10;
d[loc] = disp;
if (loc == 1)
{
if (d[0] + disp == 65)
{
score1++;
loc = 7;
disp = rand() % 7 + 26;
}
else
{
SetBeep(2000, 50);
flag = 1;
fin = 1;
}
}
else
{
loc--;
}
}
}
void PlayGameTogater()
{
int i, mid;
if (flag2 == 0) //˫�������
{
mid = score1;
for (i = 0; i < 4; i++)
{
d[3 - i] = (char)(mid % 10);
mid = mid / 10;
}
d[4] = 10;
d[5] = 10;
d[6] = val6;
d[7] = val7;
if (OK == 0 && OK2 == 0)
{
if (score1 >= score2)
{
SetMusic(enumModeInvalid, enumModeInvalid, &song, sizeof(song), enumMscDrvLed);
SetPlayerMode(enumModePlay);
}
OK = 1;
First=1;
}
}
else //��Ϸ���ܶ�����Ҫ������ʱ
{
SetPlayerMode(enumModeStop);
LedPrint(0);
for (i = 1; i < 8; i++)
d[i] = 10;
d[loc] = disp;
if (loc == 1)
{
loc = 7;
if (d[0] + disp == 65)
{
OK = 1;
if (diff <= 5)
score1 += diff;
else if (diff <= 8)
score1 += diff * 2;
else
score1 += diff * 3;
}
else
{
OK = 0;
SetBeep(2000, 50);
datao[0] = 0xaa; //����0xaa,0x55
datao[1] = 0x55;
datao[2] = d[6];
datao[3] = d[7];
datao[4] = score1;
datao[5] = OK;
datao[6] = 1; //�쳣����
Uart2Print(&datao, sizeof(datao));
}
flag2 = 0;
}
else
loc--;
}
}
void Play_callback() //��Ϸ�ص�����
{
if (format == 0)
{
if (flag == 0)
{
time++;
if (time == delay)
{
PlayGame();
time = 0;
if (score1 < 5)
delay = 100;
else if (score1 < 10)
delay = 80;
else if (score1 < 15)
delay = 50;
else if (score1 < 20)
delay = 40;
else if (score1 < 25)
delay = 35;
else
delay = 30;
}
}
else
PlayGame();
}
if (format == 1)
{
if (flag2 == 0)
PlayGameTogater();
else
{
time++;
if (time == delay)
{
PlayGameTogater();
time = 0;
}
}
}
}
void mykey_callback() //�����ص�
{
if (GetKeyAct(enumKey1) == enumKeyPress)
{
SetBeep(1000, 10);
if (format == 0 && fin == 0)
{
flag = !flag;
}
if (format == 1 && flag2 == 0) //������������
{
if (val7 == 32)
val7 = 26;
else
val7++;
}
}
if (GetKeyAct(enumKey2) == enumKeyPress)
{
SetBeep(1000, 10);
if (format == 0)
{
fin = 0;
loc = 7;
score1 = 0;
disp = rand() % 7 + 26;
delay = 100;
flag = 0;
time = 0;
}
if (format == 1 && flag2 == 0)
{
if (val6 == 9)
val6 = 1;
else
val6++;
}
}
}
void myKN_callback() //���������ص�
{
if (GetAdcNavAct(enumAdcNavKey3) == enumKeyPress)
{
SetBeep(1000, 10);
format = !format;
fin = 0;
loc = 7;
score1 = 0;
delay = 100;
flag = 1;
time = 0;
if (format == 0)
d[0] = 33;
}
if (GetAdcNavAct(enumAdcNavKeyUp) == enumKeyPress && ((!format && flag == 0) || (format && flag2 == 1)))
{
SetBeep(1000, 10);
if (d[0] == 39)
d[0] = 33;
else
d[0] = d[0] + 1;
}
if (GetAdcNavAct(enumAdcNavKeyDown) == enumKeyPress && ((!format && flag == 0) || (format && flag2 == 1)))
{
SetBeep(1000, 10);
if (d[0] == 33)
d[0] = 39;
else
d[0] = d[0] - 1;
}
if (GetAdcNavAct(enumAdcNavKeyCenter) == enumKeyPress && format == 1 && flag2 == 0) //����ģʽ�Ҵ��ڷ����
{
SetBeep(1000, 10);
if(First)//��һ�η���ʱ
{
score1=0;
score2=0;
First=0;
}
time = 0;
datao[0] = 0xaa; //����0xaa,0x55
datao[1] = 0x55;
datao[2] = d[6];
datao[3] = d[7];
datao[4] = score1;
datao[5] = OK;
datao[6] = 0; //��������
Uart2Print(&datao, sizeof(datao));
}
}
void myUart2Rxd_callback() //485��Ϣ�ص�
{
if (format == 1 && flag2 == 0) //����ģʽ�Ҵ��ڷ����
{
normal = datao[6];
if (normal == 0 && OK == 1) //����
{
SetBeep(1000, 20);
if(First)
{
score1=0;
score2=0;
First=0;
}
OK2 = datao[5];
disp = datao[3];
diff = datao[2];
score2 = datao[4];
switch (diff)
{
case 1:
delay = 100;
break;
case 2:
delay = 90;
break;
case 3:
delay = 80;
break;
case 4:
delay = 70;
break;
case 5:
delay = 60;
break;
case 6:
delay = 50;
break;
case 7:
delay = 45;
break;
case 8:
delay = 40;
break;
case 9:
delay = 30;
break;
}
flag2 = 1;
d[0] = 33;
PlayGameTogater();
}
else //�쳣
{
// SetBeep(2000, 10);
OK2 = datao[5];
score2 = datao[4];
}
}
}
void main()
{
AdcInit(ADCexpEXT);
MySTC_Init();
DisplayerInit();
Key_Init();
BeepInit();
MusicPlayerInit();
flag = 1; //��Ϸ����
format = 0; //����
datao[5] = 1;
SetDisplayerArea(0, 7);
Seg7Print(34, 0, 0, 0, 0, 0, 0, 0);
PlayTone(enumModeInvalid, enumModeInvalid, &song, sizeof(song));
SetMusic(enumModeInvalid, enumModeInvalid, &song, sizeof(song), enumMscDrvLed);
Uart2Init(2400, Uart2Usedfor485);
SetUart2Rxd(&datao, sizeof(datao), datahead, sizeof(datahead));
SetEventCallBack(enumEventKey, mykey_callback);
SetEventCallBack(enumEventNav, myKN_callback);
SetEventCallBack(enumEventSys1mS, updatadisp);
SetEventCallBack(enumEventSys10mS, Play_callback);
SetEventCallBack(enumEventUart2Rxd, myUart2Rxd_callback);
while (1)
{
MySTC_OS();
}
}
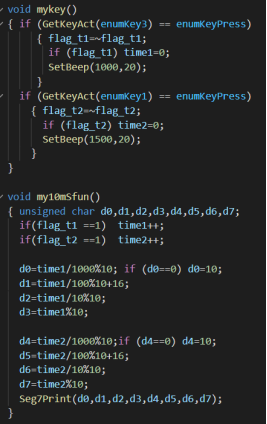
��ʶ����֤Demo3����(Demo3��ǰ���ṩ���ص�HEX�ļ�,�ο�Դ������ʵ����������ṩ),�ο�Demo2Դ��,���ܷ��д����ʵ��Demo3��ͬ���ܺ�Ч��?
ʵ�����:
#include "STC15F2K60S2.H"
#include "displayer.h"
#include "beep.h"
#include "Key.h"
#include "sys.h"
code unsigned long SysClock=11059200;
#ifdef _displayer_H_
code char decode_table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x00,0x08,0x40,0x01, 0x41, 0x48,
0x3f|0x80,0x06|0x80,0x5b|0x80,0x4f|0x80,0x66|0x80,0x6d|0x80,0x7d|0x80,0x07|0x80,0x7f|0x80,0x6f|0x80 };
unsigned int time1,time2;
bit flag_t1=0,flag_t2=0;
void mykey()
{ if (GetKeyAct(enumKey3) == enumKeyPress)
{ flag_t1=~flag_t1;
if (flag_t1) time1=0;
SetBeep(1000,20);
}
if (GetKeyAct(enumKey1) == enumKeyPress)
{ flag_t2=~flag_t2;
if (flag_t2) time2=0;
SetBeep(1500,20);
}
}
void my10mSfun()
{ unsigned char d0,d1,d2,d3,d4,d5,d6,d7;
if(flag_t1 ==1) time1++;
if(flag_t2 ==1) time2++;
d0=time1/1000%10; if (d0==0) d0=10;
d1=time1/100%10+16;
d2=time1/10%10;
d3=time1%10;
d4=time2/1000%10;if (d4==0) d4=10;
d5=time2/100%10+16;
d6=time2/10%10;
d7=time2%10;
Seg7Print(d0,d1,d2,d3,d4,d5,d6,d7);
}
void main()
{ DisplayerInit();
BeepInit();
Key_Init();
SetEventCallBack(enumEventSys10mS, my10mSfun);
SetEventCallBack(enumEventKey,mykey);
SetDisplayerArea(0,7);
LedPrint(0);
MySTC_Init();
while(1)
{ MySTC_OS();
}
}
����Ч��:����Key1����key2��,��ʼ����1S��Ԥ������,������µ�ʱ��С��1���ᴥ����ʼָ��,��ʱ�����1Sʱ�ɿ�������ʼ˫ͨ����ʱ��ʼ,����key1,key2����ֹͣ���ͨ����ʱ,������ͨ����ֹͣʱ,�ٴΰ���Key1��Key3��ʼ���¼�ʱ,ԭ���Ǽ�ʱ�������,Ȼ���ظ����ϲ��衣
ʵ��������������ѵ�
1,��ʦdemo�д���2���¼���ע�͵����д����

2,����״̬��ȡ����GetKeyAct()��ʹ��һ�κ�״̬���ΪNULL��
������Ҫͨ��һЩ��̷��������,�������������demo3�ĸ��ִ����е�һ���ö����һ�������������ܶ�����е�����ֿ��Ա��⺯��ʧЧ�������
ʵ���ջ���ᡢ�Ľ����
����ʵ�����ݽ϶�,һ������Ϥ��֮ǰ��Сѧ�ڵ����ģ�����,������Dz�����Сѧ����ҵ��û��ʹ�õ�ģ��֪ʶ