Ŀ¼
????????��Ƭ������С��һֱ�Ǵ�Һ�ϲ����С���,����С����������Ȼ�ѶȲ���,���Ƕ��ڳ�ѧ����˵,����İ��,���Ҳ���Ǿ����ż��ߡ���ʵ��,�ܶණ��������������,��������֮��Żᷢ��,ԭ��Ҳ������ˡ�
? ? ? ? �Ҽƻ��ڽ�������һ��ʱ����,�϶������ظ���Ҵ�������С����������,�����ѡ��漰�����ء�WIFI�ء�NRF24L01����,����ң�ؿ���,���⡢���������ϡ�Ѱ���ȡ�ÿһƪ����һ�����������,������������Ӳ����������,ϣ�����Ը��������
? ? ? ? ���ڽ�����һ�����������ϵ�С����
һ��ԭ������
? ? ? ? ��Ϊ����С��,�������һ��϶��ǽ��������������⡣
? ? ? ? �����г����������ʺ�С�����������ģ��,��������L298N��L9110S��DRV8833��TB6612�ȡ���ЩоƬ/ģ���������,���ǿ���ԭ���ͷ����������ơ���ЩоƬ/ģ�����ϸ���ܿ��Բ��յڶ���ϵͳӲ�����,����ϸ�ؽ�����������оƬ/ģ�����Ҫ�����Լ�ʹ�÷�����
? ? ? ? ������������,���������dz�����ģ�顣��������϶��,��������ʵ�ֱ���,ʹ��С������ȥ�������ܡ�
? ? ? ? �����������stm32Ϊ����,��ϵ������������ͳ�����ģ��,ʵ��С�����Զ����Ϲ��ܡ�
����ϵͳӲ�����
1.�������ѡ��
1.1? L298N
������ѹ:2.5~46V,
��ͨ������������:2A,
����Դ(Vss):4.5~7V,
�͵�ƽ���뷶Χ:-0.3~1.5V,
�ߵ�ƽ���뷶Χ:2.3~Vss,
��������·�����
Ӧ�õ�·ͼ:
? ? ? ? ? ??? ??
? ? ? ? ?����Ӧ�õ�·Ϊ�ο���·,VS��VSS������ʹ��5V(������ʹ��3.3V),IN�����Լ�PWM����ʹ��5V����3.3V��Ƭ��,ע��PCB�岼���ʵ��Ӵ�,�ҹ����ر��ֳ��������
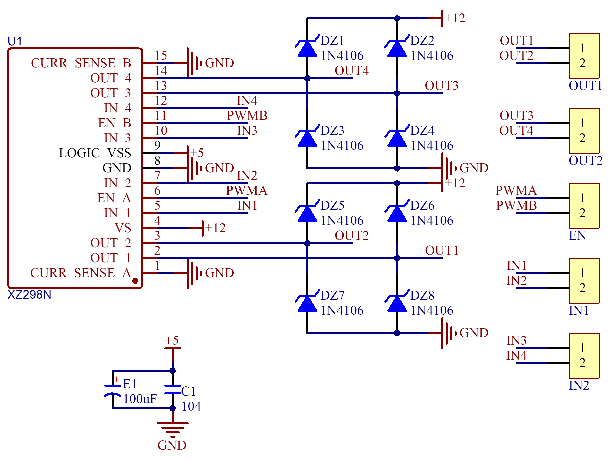
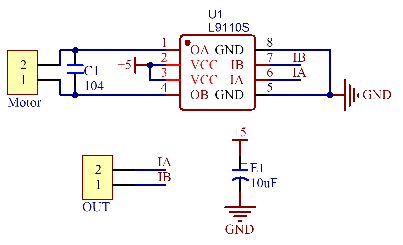
1.2? L9110
������ѹ:2.5V~12V,
���������������:DIP8? 1.0A(8V)
? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? SOP8? 0.8A(8V),
����ߵ�ƽ:2.5V~10V
����͵�ƽ:<0.7V,
��·�����
��ֵ��:

Ӧ�õ�·ͼ:
? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ??
1.3? DRV8833
�����ѹ:2.7V~10.8V,
�������(VM = 5V,25��C ʱ),
�C ���� PWP/RTY ��װ:ÿ�� H �ŵ� RMS ����Ϊ 1.5A,��ֵ����Ϊ 2A;
�C ���� PW ��װ:ÿ�� H �ŵ� RMS ����Ϊ500mA,��ֵ����Ϊ 2A;
? ���Խ��������,��ʵ��
�C 3A RMS ������4A ��ֵ����(PWP �� RTY ��װ);
�C 1A RMS ������4A ��ֵ����(PW ��װ);
��������·�����
Ӧ�õ�·ͼ:
? ? ? ? ? ???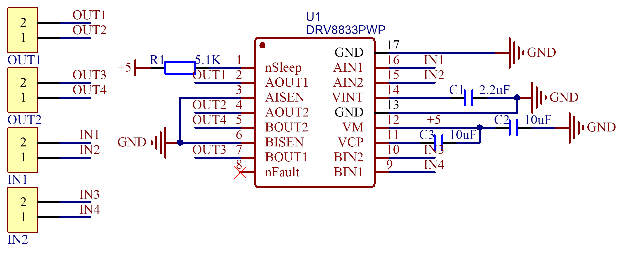
? ? ? ?����Ӧ�õ�·Ϊ�ο���·,IN�����Լ�PWM����ʹ��5V����3.3V��Ƭ��,ע��PCB�岼���ʵ��Ӵ�,�ҹ����ر��ֳ��������
1.4? TB6612
�����ѹ:
???????? VCC:2.7~5.5V?????? оƬС�źŵ�Դ
???????? VM:2.5~13.5V??? �������
����:MAX 1.0A?? VM>=4.5V
???????? ? MAX 0.4A?? 2.5<=VM<4.5V
PWM:���֧��100KHz��
��������·�����
��ֵ��:
?Ӧ�õ�·ͼ:
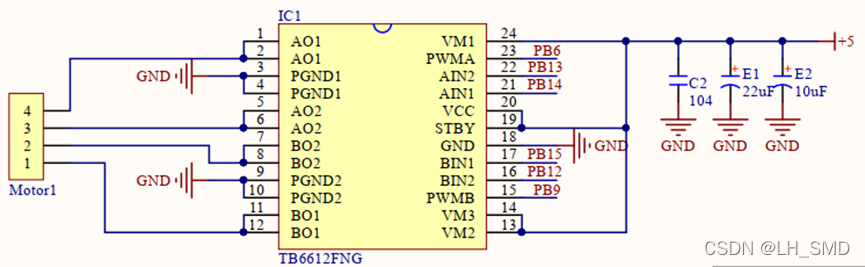
? ? ? ? ��ЩоƬ��������,�ɸ���ʵ�����ѡ����ʵ�оƬ���ڱ������,������TB6612��Ϊ���������ֵ��˵������,ĿǰTB6612�Ѿ�ͣ��,�Ҽ۸���Ը߰�,�����ѡ��(��Ϊʲô�һ�ѡ�������,��Ϊ�һ��п��,˳������,��������)
2.ϵͳ����Ӳ�����
? ? ? ? �ڱ������,Ӳ����Ϊstm32������ģ�顢TB6612�������ģ�顢������ģ�顢���ģ���ĸ����֡�������������ͼ��ʾ:
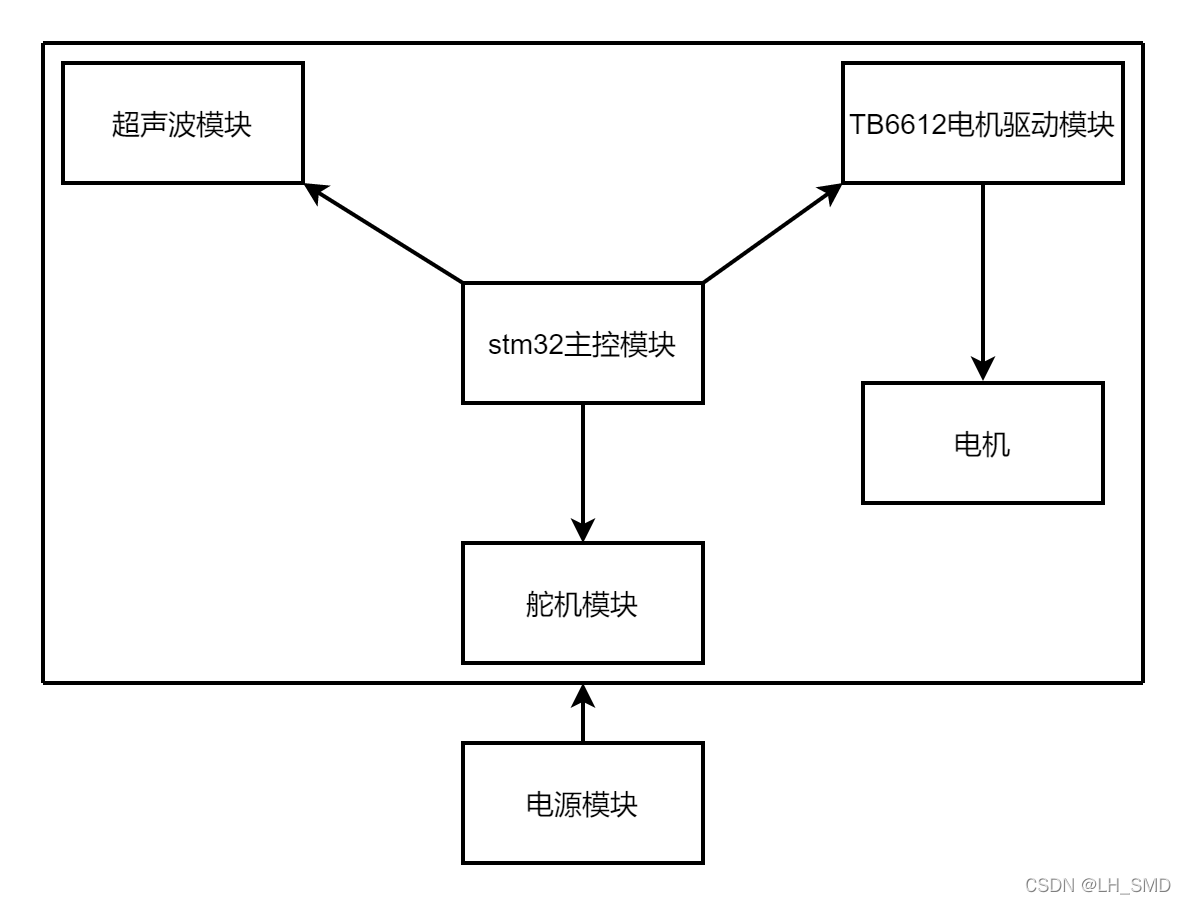
? ? ? ? ������Ҫע���ص�ѡ��,����ѡ���������¡������Ʒ��,��ЩƷ�Ƶĵ��һ����������ȶ�,�������㡣����̰����,����ʱ��Ч������,�Ӻ������Լ���
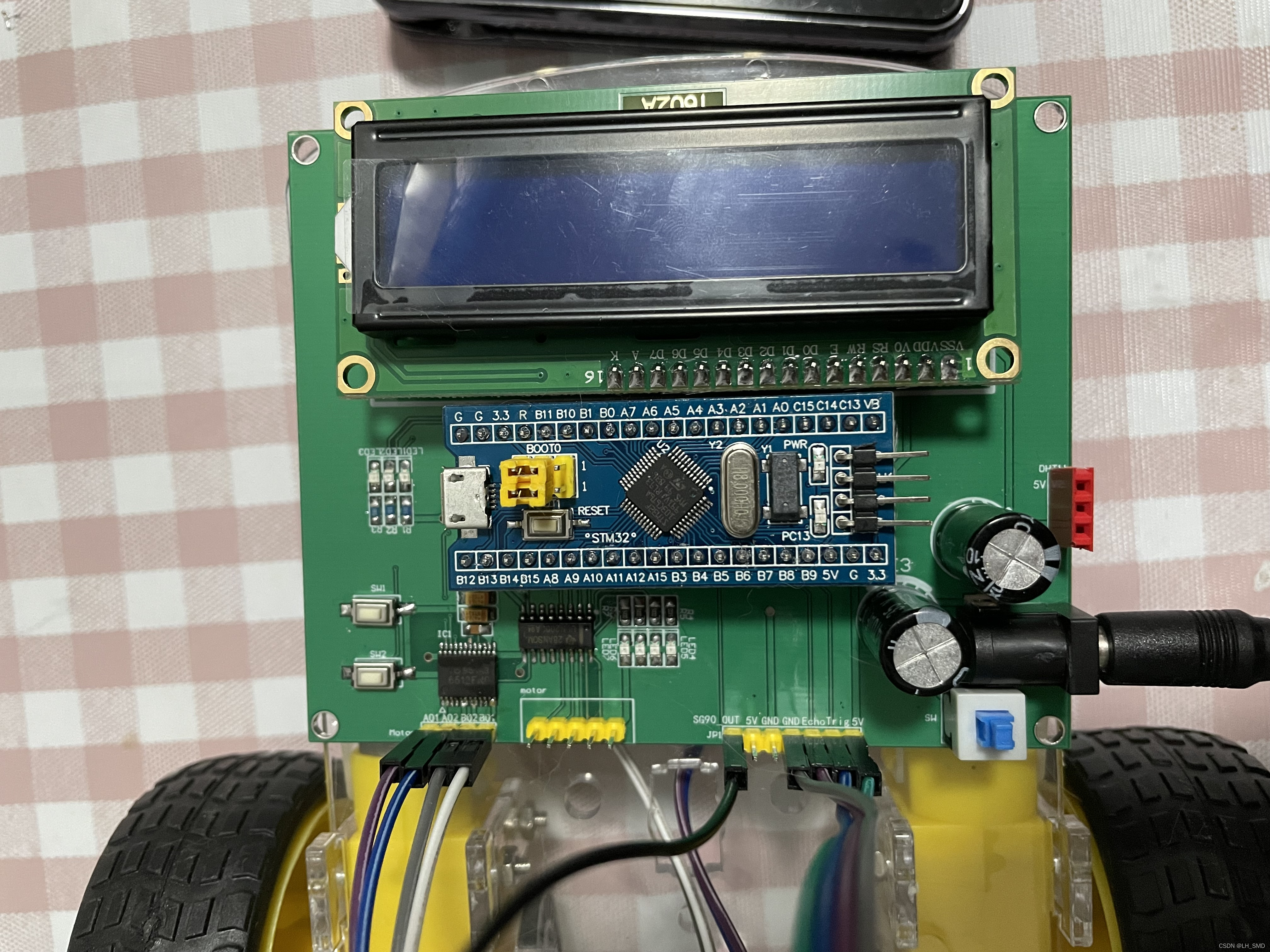
3.stm32������ģ��
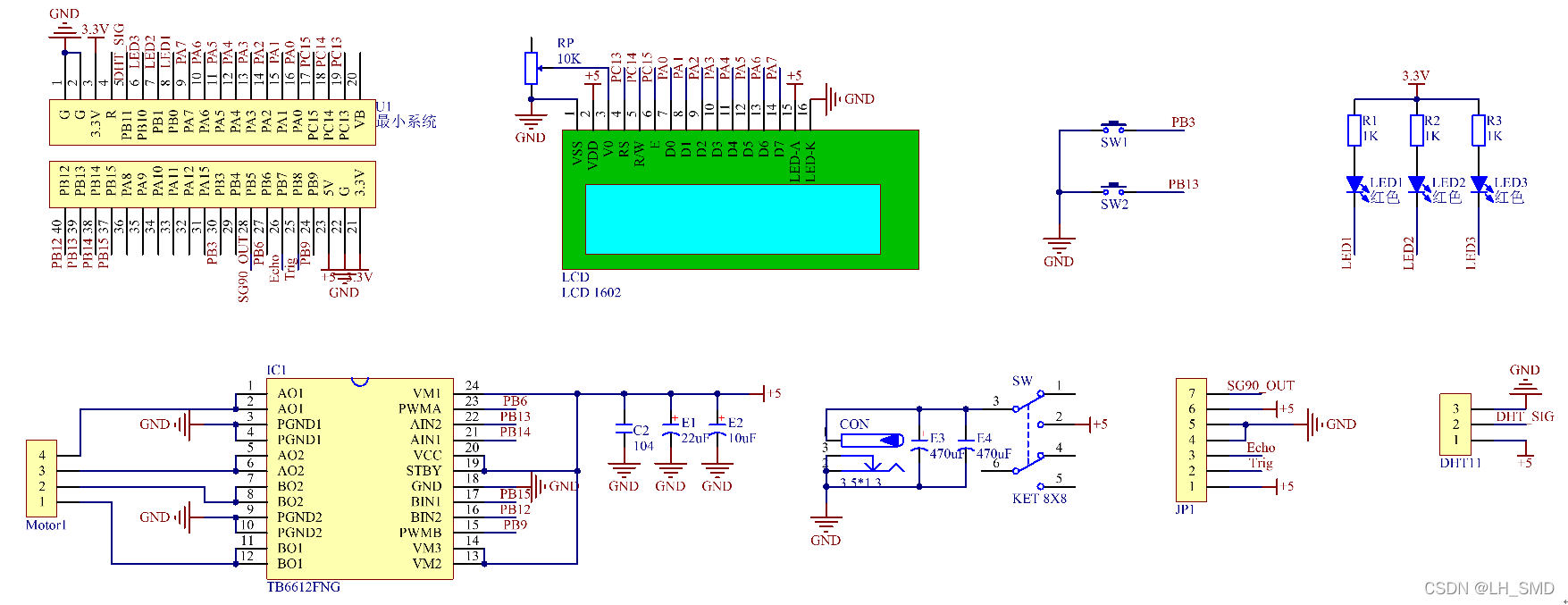
? ? ? ? stm32��Сϵͳ��ԭ��ͼ������ʾ(��������Ŵ�):
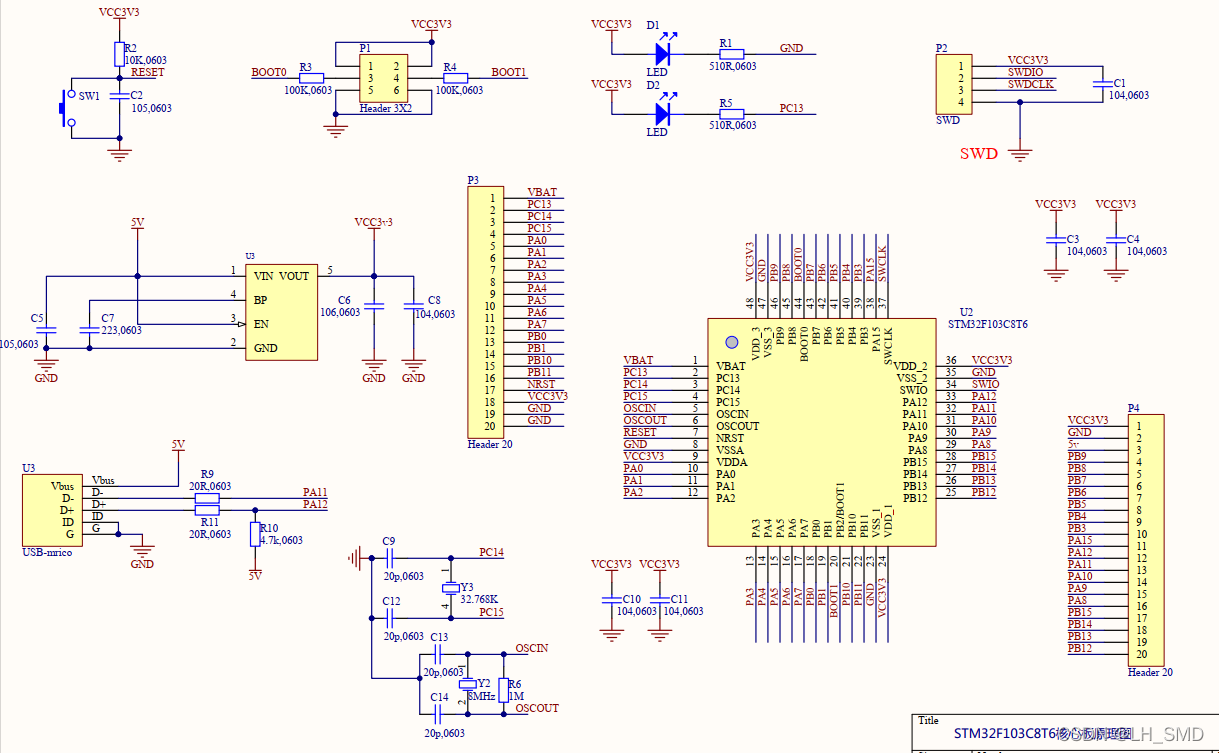
?????????stm32f103c8t6Ϊ�ⷨ�뵼��������һ�������32λ������,����ARM cortex-M3Ϊ�ں�,���ȶ����е������,��Ƶ�ɸߴ�72M,�Ǵ�ͳ51��Ƭ�������ܵļ�ʮ��,��������ิ�ӵĹ��ܡ�����Сϵͳ��Ҫ����:stm32оƬ����λ��·��ʱ�ӵ�·����Դ��·��������¼��·��bootѡ���·��
? ? ? ? stm32f103c8t6���ŷḻ������,����GPIO��USART��ADC��PWM��TIMER��Ӳ��SPI��Ӳ��IIC��USB�ȡ��ڱ������,����ʹ�õ�������������:GPIO��TIMER��PWM������,GPIO��TIMER���ڿ��Ƶ������ת�����Ƴ���������Լ����ת�����ŵ��ź�;PWM���ڵ��ڵ��ת�١�
?
4.�����̨
? ? ? ? �����̨���ó��õ�SG90,��ʵ��ͼ����:
? ? ? ? ??? ? ? ? ??
? ? ? ? SG90ֻ��������:VCC��GND���ź���(4-6V����,�ź����ſ���5V,Ҳ����3.3V)�������ź��߾��ǿ��ƶ����ת�ġ�����ԭ��ͼ�ܼ�,ֻ��Ҫ���Ƶ�Ƭ����������Ϊ20ms,�ߵ�ƽ��0.5ms~2.5ms֮���һ������,��ʵ��,����ʵ�ʲ���,������3-20ms���ǿ��Եġ�������ֻ��180����ת,����,������90���λ��Ϊ������,������ת�������(ע������ƫ�IJο���,����ֻ��ʾ����ƫ��):
? ? ? ?�ߵ�ƽΪ1.5msʱ,���λ������λ�á�
? ? ? ? �ߵ�ƽΪ0.5msʱ,�����ƫ90�㡣
? ? ? ? �ߵ�ƽΪ2.5msʱ,�����ƫ90�㡣
? ? ? ? �����������Ʒ���,��������������ϸ���ܡ�
5.������ģ��
? ? ? ? ����������ģ���ʵ��ͼ����:
? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ??
? ? ? ? ? ? ? ? ? ??
? ? ? ? ? ? ������ģ��ʱ���������ڿ����д����Ϊԭ��ͼ��Ƶġ�ģ��ͨ��trig������������,��ʱ��ʼ��ʱ,�����������������ϰ���ͻᷴ��,���������������ᱻ������ģ���̽ͷ����,��ʱecho����״̬�������ı�,��ʱֹͣ,���������ڿ����д����ٶ�,�Ϳ��Ժܷ������������������ϰ���ľ��롣
? ? ? ? ��ģ��Ĺ���Ϊ5V,trig��echo�ɽ�5V��Ƭ��,Ҳ���Խ�3.3V��Ƭ����
����ϵͳ�������
1.ϵͳ�����������
? ? ? ? ��������������ͼ����:
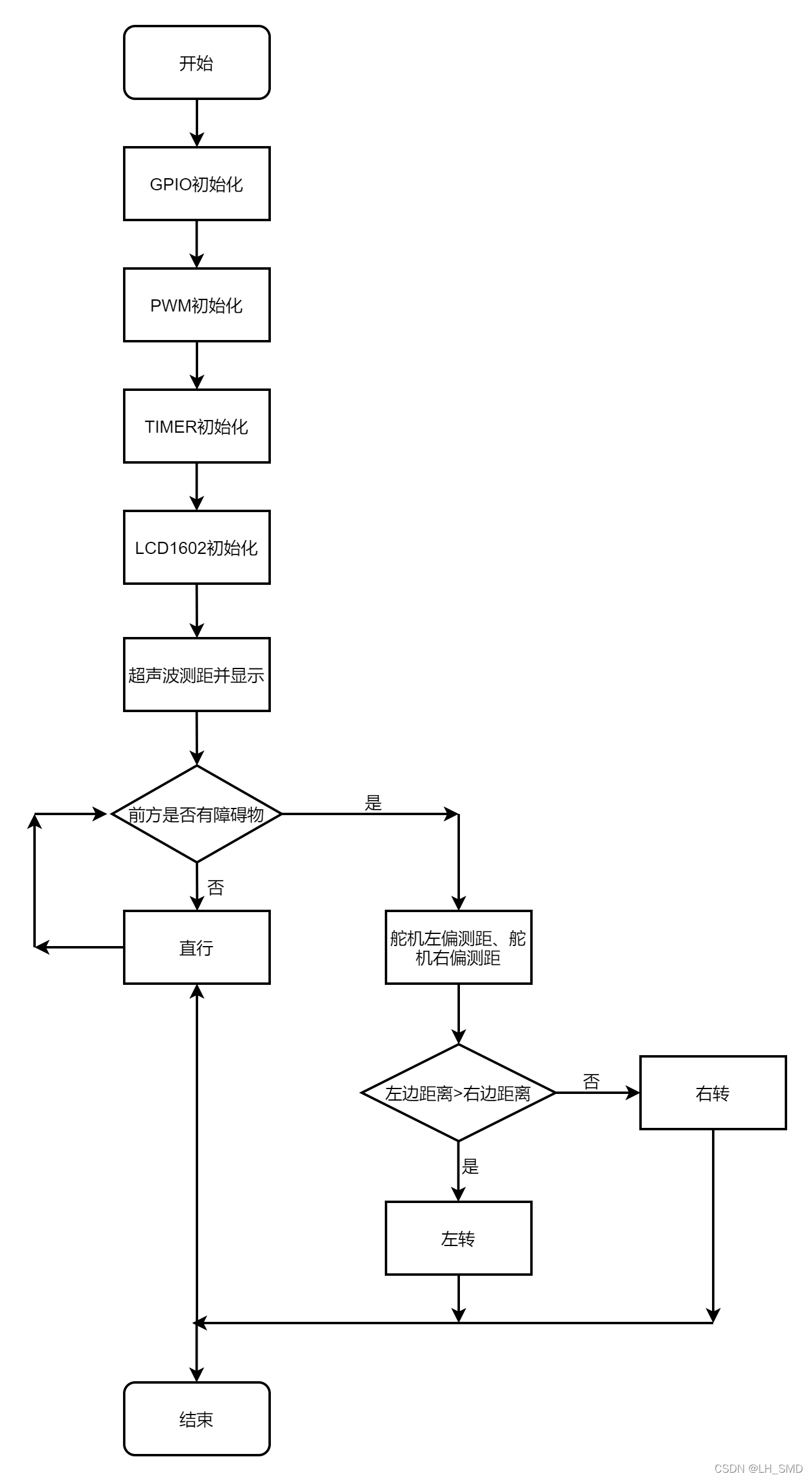
? ? ? ? stm32������Ҫ��������Ҫ�õ�������г�ʼ��,Ȼ�������ѭ��,���ϵؽ��г�������ಢ��ʾ,��ǰ�������ϰ���ʱ,���������������ת���зֱ���,������������ֵ���бȽ�,Ȼ��������������һ����ת���������,��������������������ϵĹ��̡�
2.����������ٶȵĿ���
? ? ? ? �ڱ������,����ٶȿ�������·PWM����,�ֱ������stm32��PB6��PB9��,ΪTIM4��ͨ��һ��ͨ����,�����ڱ����ʹ�õ�stm32�����ͺ�Ϊstm32f103c6t6,�����貢û��TIM4,���,������ö�ʱ�����ڱ仯����PWM����ʵ��,�ɽ�TB6612��PWMA��PWMBֱ�ӽӸߵ�ƽ,����,������ڸõ�ѹ����߹�������,�������������ڿ��ơ�
? ? ? ? ��ʹ�ö�ʱ�����ڱ仯����PWMǰ,������Ҫ��ʼ��TB6612����stm32������GPIO,���ʼ������������ʾ:
void TB6612_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //ʹ��PB�˿�ʱ��
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //�������
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO���ٶ�Ϊ50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //�����趨������ʼ��
GPIO_ResetBits(GPIOB,GPIO_Pin_6|GPIO_Pin_9);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12|GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //�������
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO���ٶ�Ϊ50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //�����趨������ʼ��
GPIO_ResetBits(GPIOB,GPIO_Pin_12|GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15);
}
? ? ? ?Ϊ��ʹ����ЩGPIO����,����ʹ�ú궨��������ЩGPIO�����������,����:
#define PWMA PBout(6)
#define PWMB PBout(9)
#define AIN1 PBout(14)
#define AIN2 PBout(13)
#define BIN1 PBout(15)
#define BIN2 PBout(12)???????ʹ��stm32��ʱ��,������Ҫʹ����������ʱ��,Ȼ�����ö�ʱ����ʱʱ�估��ʱ��ʽ,��ʱ��,����д��ʱ���жϷ��������ɡ�������������:
void TIM1_Int_Init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE); //ʱ��ʹ��
TIM_TimeBaseStructure.TIM_Period = arr; //��������һ�������¼�װ�����Զ���װ�ؼĴ������ڵ�ֵ
TIM_TimeBaseStructure.TIM_Prescaler =psc; //����������ΪTIMxʱ��Ƶ�ʳ�����Ԥ��Ƶֵ
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //����ʱ�ӷָ�:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM���ϼ���ģʽ
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); //����TIM_TimeBaseInitStruct��ָ���IJ�����ʼ��TIMx��ʱ�������λ
TIM_ITConfig(TIM1,TIM_IT_Update,ENABLE ); //ʹ��ָ����TIM3�ж�,���������ж�
NVIC_InitStructure.NVIC_IRQChannel = TIM1_UP_IRQn; //TIM3�ж�
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //��ռ���ȼ�0��
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //�����ȼ�3��
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQͨ����ʹ��
NVIC_Init(&NVIC_InitStructure); //����NVIC_InitStruct��ָ���IJ�����ʼ������NVIC�Ĵ���
TIM_Cmd(TIM1, ENABLE); //ʹ��TIMx����
}
//��ʱ��3�жϷ������
void TIM1_UP_IRQHandler(void) //TIM3�ж�
{
if (TIM_GetITStatus(TIM1, TIM_IT_Update) != RESET) //���ָ����TIM�жϷ������:TIM �ж�Դ
{
TIM_ClearITPendingBit(TIM1, TIM_IT_Update ); //���TIMx���жϴ�����λ:TIM �ж�Դ
PWMA = !PWMA;
PWMB = !PWMB;
}
}? ? ? ? Ȼ�����������е�������������,���ﲻ�����ƶ�ʱ����Ƶ��Ϊ100KHz,������PWMƵ��Ϊ50KHz,ռ�ձ�Ϊ50%,����:
TB6612_GPIO_Init();
TIM1_Int_Init(719, 0);//72000000/720 = 100 000? ? ? ? ������õ�����Ƶ��ٶȸ���,ֱ�ӼӴ�ʱ��3��ռ�ձȼ��ɡ�
? ? ? ? ������С��ǰ��������,��ת����ת��ֹͣ�Ŀ�����,�����Լ�,�����������:
void go_straight(void)
{
AIN1 = 1;
AIN2 = 0;
BIN1 = 1;
BIN2 = 0;
}
void go_back(void)
{
AIN1 = 0;
AIN2 = 1;
BIN1 = 0;
BIN2 = 1;
}
void ture_right(void)
{
AIN1 = 1;
AIN2 = 0;
BIN1 = 0;
BIN2 = 1;
}
void ture_left(void)
{
AIN1 = 0;
AIN2 = 1;
BIN1 = 1;
BIN2 = 0;
}
void stop(void)
{
AIN1 = 0;
AIN2 = 0;
BIN1 = 0;
BIN2 = 0;
}? ? ? ? ����,�йص���Ŀ��ƽ���,��ʵ��,���������ĵ������оƬ,��������ʽ������������ʽ��ͬС��,����ֱ���հ��ճ��Ϳ��ԡ�
3.�����̨�Ŀ���
? ? ? ? �����̨�Ŀ���ԭ����ǰ�����Ѿ����ܹ�,��������,������PWM�����ƶ����ת������ԭ��ͼ�������,����źŵĿ����������ӵ���STM32��PB5,Ϊ��ʱ��3��ͨ��2,���,������Ҫ����stm32��ʱ3ͨ��2��PWM��ʼ��������:
void TIM3_PWM_SG90_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //ʹ�ܶ�ʱ��3ʱ��
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //ʹ��GPIO�����AFIO���ù���ģ��ʱ��
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //Timer3������ӳ�� TIM3_CH2->PB5
//���ø�����Ϊ�����������,���TIM3 CH2��PWM���岨�� GPIOB.5
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //TIM_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //�����������
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);//��ʼ��GPIO
//��ʼ��TIM3
TIM_TimeBaseStructure.TIM_Period = arr; //��������һ�������¼�װ�����Զ���װ�ؼĴ������ڵ�ֵ
TIM_TimeBaseStructure.TIM_Prescaler =psc; //����������ΪTIMxʱ��Ƶ�ʳ�����Ԥ��Ƶֵ
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //����ʱ�ӷָ�:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM���ϼ���ģʽ
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //����TIM_TimeBaseInitStruct��ָ���IJ�����ʼ��TIMx��ʱ�������λ
//��ʼ��TIM3 Channel2 PWMģʽ
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //ѡ��ʱ��ģʽ:TIM������ȵ���ģʽ2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //�Ƚ����ʹ��
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //�������:TIM����Ƚϼ��Ը�
TIM_OC2Init(TIM3, &TIM_OCInitStructure); //����Tָ���IJ�����ʼ������TIM3 OC2
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //ʹ��TIM3��CCR2�ϵ�Ԥװ�ؼĴ���
TIM_Cmd(TIM3, ENABLE); //ʹ��TIM3
}? ? ? ? ͬ��,Ϊ��ʹ�÷���,���ォһЩGPIO,Ƶ��,��ת�Ƕȵ�(������Ҫ��ϵ����Ŀ���ԭ��������,����Ͳ�����)�����Ϣ,�ú�������:
#define TIM3_PWM_SG90_PERIOD (1200-1)
#define TIM3_PWM_SG90_PRESCALER (1200-1)
/* Ƶ��50HZ 20ms */
#define SG90_PWM_FREQ 72000000/((TIM3_PWM_SG90_PERIOD)*(TIM3_PWM_SG90_PRESCALER))
#define SG90_CENTRE ((int)(1.5/20*TIM3_PWM_SG90_PERIOD))
#define SG90_RIGHT ((int)(0.5/20*TIM3_PWM_SG90_PERIOD))
#define SG90_LEFT ((int)(2.5/20*TIM3_PWM_SG90_PERIOD))????????PWM��Ƶ��Ϊ50Hz,��20ms,������������:
TIM3_PWM_SG90_Init(TIM3_PWM_SG90_PERIOD,TIM3_PWM_SG90_PRESCALER);//PWMƵ��=72000/((1200)*(1200))=50hz ? ? ? ? ����ֻ��Ҫ����Ҫ���ƶ����תʱ,���ú�������,����,������ƶ����̨��ת,������ô����:
TIM_SetCompare2(TIM3, SG90_LEFT);4.���������
? ? ? ? �������Ŀ���ԭ��ͬ����Ӳ�������½������˽��ܡ�����Ŀ��Բ鿴������ģ��������ֲᡣ
? ? ? ? ����,��Ҫ��ʼ��һ����ʱ��,���ں�������������������صļ�ʱ,����ʹ��stm32�Ķ�ʱ��2����ʱ,���ʼ����������:
void TIM2_Ultrasonic_Init(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructer;
NVIC_InitTypeDef NVIC_InitStructer;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
/*��ʱ��TIM2��ʼ��*/
TIM_DeInit(TIM2);
TIM_TimeBaseInitStructer.TIM_Period = 999;//��ʱ����Ϊ1000
TIM_TimeBaseInitStructer.TIM_Prescaler = 71; //��Ƶϵ��72
TIM_TimeBaseInitStructer.TIM_ClockDivision = TIM_CKD_DIV1;//����Ƶ
TIM_TimeBaseInitStructer.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructer);
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);//���������ж�
NVIC_InitStructer.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStructer.NVIC_IRQChannelSubPriority = 2;
NVIC_InitStructer.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructer.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructer);
TIM_Cmd(TIM2, DISABLE);//�رն�ʱ��ʹ��
}? ? ? ? Ȼ��Ϳ��Կ�ʼ����ˡ�
? ? ? ? ��Ҫ���Ƴ�������������,����:
GPIO_SetBits(TRIG_PORT, TRIG_PIN); //�����ź�,��Ϊ�����ź�
delay_us(20); //�ߵ�ƽ�źų���10us
GPIO_ResetBits(TRIG_PORT, TRIG_PIN);????????Ȼ��,��Ҫ�ȴ������������ϰ���ص�,ͬʱ������ʱ����ʱ:
/*�ȴ������ź�*/
while(GPIO_ReadInputDataBit(ECHO_PORT, ECHO_PIN) == RESET);
TIM_Cmd(TIM2,ENABLE);//�����źŵ���,������ʱ������
while(GPIO_ReadInputDataBit(ECHO_PORT, ECHO_PIN) == SET);//�����ź���ʧ
TIM_Cmd(TIM2, DISABLE);//�رն�ʱ��? ? ? ? �õ��Ӷ�ʱ��������������ʱ��:
tim = TIM_GetCounter(TIM2);//��ȡ��TIM2���Ĵ����еļ���ֵ,һ��������ź�ʱ��? ? ? ? �õ����ʱ���,���������ڿ����д������ٶ�Ϊ340m/s(25��),�Ϳ��Եõ�������ģ������ϰ���Ĵ��¾���(��λ:cm):
distance = (tim + overcount * 1000) / 58.0;//ͨ�������źż������? ? ? ? Ϊ��ʹ�ò����ľ������ȷ���ȶ�,������ö�β�����ƽ��ֵ�ķ���:ȥ��һ�����ֵ,ȥ��һ����Сֵ,Ȼ����ƽ��ֵ������:
float get_ultrasonic_distance(void)
{
float distance = 0;
u16 tim;
GPIO_SetBits(TRIG_PORT, TRIG_PIN); //�����ź�,��Ϊ�����ź�
delay_us(20); //�ߵ�ƽ�źų���10us
GPIO_ResetBits(TRIG_PORT, TRIG_PIN);
/*�ȴ������ź�*/
while(GPIO_ReadInputDataBit(ECHO_PORT, ECHO_PIN) == RESET);
TIM_Cmd(TIM2,ENABLE);//�����źŵ���,������ʱ������
while(GPIO_ReadInputDataBit(ECHO_PORT, ECHO_PIN) == SET);//�����ź���ʧ
TIM_Cmd(TIM2, DISABLE);//�رն�ʱ��
tim = TIM_GetCounter(TIM2);//��ȡ��TIM2���Ĵ����еļ���ֵ,һ��������ź�ʱ��
distance = (tim + overcount * 1000) / 58.0;//ͨ�������źż������
TIM2->CNT = 0; //��TIM2�����Ĵ����ļ���ֵ����
overcount = 0; //������������
delay_ms(1);
return distance; //������Ϊ��������ֵ
}
void bubble(unsigned long *a, int n)
{
int i, j, temp;
for (i = 0; i < n - 1; i++)
{
for (j = i + 1; j < n; j++)
{
if (a[i] > a[j])
{
temp = a[i];
a[i] = a[j];
a[j] = temp;
}
}
}
}
float get_average_distance(void)
{
float Distance;
unsigned long ultrasonic[5] = {0};
int a,num = 0;
int lastDistance;
while (num < 5)
{
Distance = get_ultrasonic_distance();
while(((int)Distance >= 500 || (int)Distance == 0))
{
Distance = get_ultrasonic_distance();
}
if(Distance >0 || (int)Distance <500)
{
ultrasonic[num] = Distance;
//lastDistance=Distance;
num++;
delay_ms(10);
}
}
num = 0;
bubble(ultrasonic, 5);
Distance = (ultrasonic[1] + ultrasonic[2] + ultrasonic[3]) / 3;
return Distance;
//printf("Distance=%d\n",Distance);
}
? ????????����,�����������ܽ�����
�ġ�ʵ��չʾ
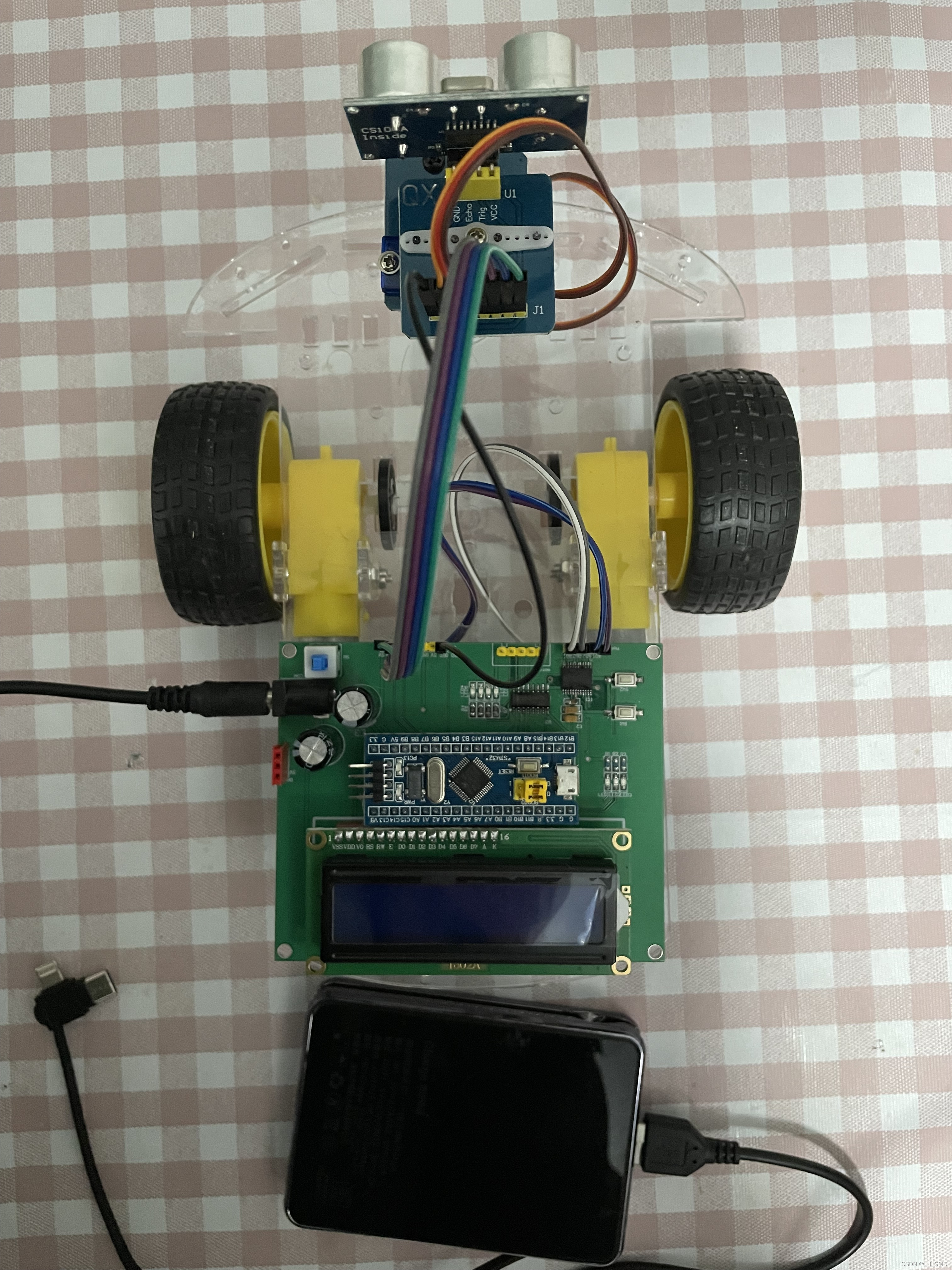
?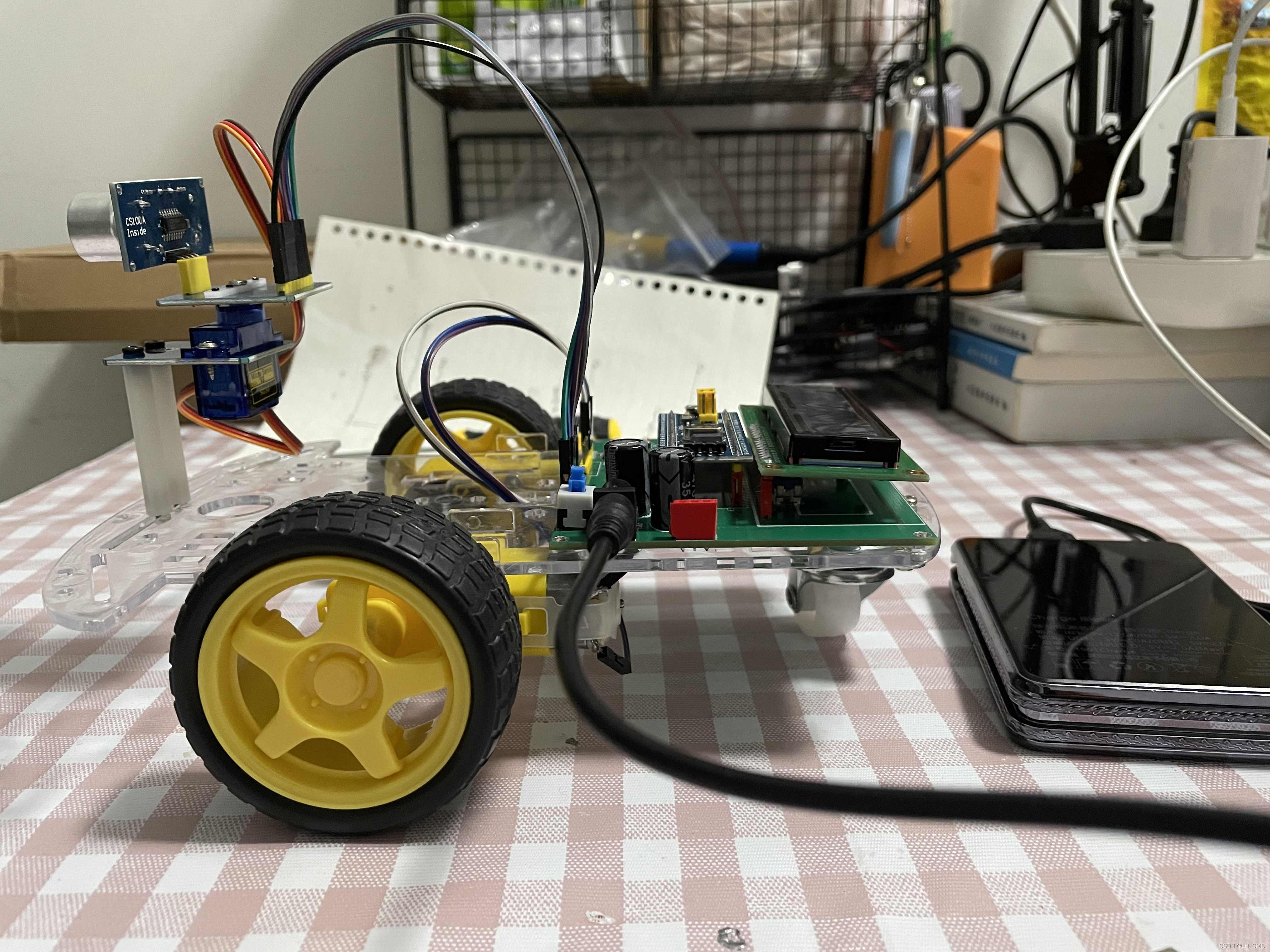
?
�塢����ԭ��ͼ
������������
pwm.c
#include "pwm.h"
//TIM3 PWM���ֳ�ʼ��
//PWM�����ʼ��
//arr:�Զ���װֵ
//psc:ʱ��Ԥ��Ƶ��
void TIM3_PWM_SG90_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //ʹ�ܶ�ʱ��3ʱ��
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //ʹ��GPIO�����AFIO���ù���ģ��ʱ��
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //Timer3������ӳ�� TIM3_CH2->PB5
//���ø�����Ϊ�����������,���TIM3 CH2��PWM���岨�� GPIOB.5
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //TIM_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //�����������
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);//��ʼ��GPIO
//��ʼ��TIM3
TIM_TimeBaseStructure.TIM_Period = arr; //��������һ�������¼�װ�����Զ���װ�ؼĴ������ڵ�ֵ
TIM_TimeBaseStructure.TIM_Prescaler =psc; //����������ΪTIMxʱ��Ƶ�ʳ�����Ԥ��Ƶֵ
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //����ʱ�ӷָ�:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM���ϼ���ģʽ
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //����TIM_TimeBaseInitStruct��ָ���IJ�����ʼ��TIMx��ʱ�������λ
//��ʼ��TIM3 Channel2 PWMģʽ
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //ѡ��ʱ��ģʽ:TIM������ȵ���ģʽ2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //�Ƚ����ʹ��
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //�������:TIM����Ƚϼ��Ը�
TIM_OC2Init(TIM3, &TIM_OCInitStructure); //����Tָ���IJ�����ʼ������TIM3 OC2
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //ʹ��TIM3��CCR2�ϵ�Ԥװ�ؼĴ���
TIM_Cmd(TIM3, ENABLE); //ʹ��TIM3
}pwm.h
#ifndef __PWM_H
#define __PWM_H
#include "sys.h"
#define TIM3_PWM_SG90_PERIOD (1200-1)
#define TIM3_PWM_SG90_PRESCALER (1200-1)
/* Ƶ��50HZ 20ms */
#define SG90_PWM_FREQ 72000000/((TIM3_PWM_SG90_PERIOD)*(TIM3_PWM_SG90_PRESCALER))
#define SG90_CENTRE ((int)(1.5/20*TIM3_PWM_SG90_PERIOD))
#define SG90_RIGHT ((int)(0.5/20*TIM3_PWM_SG90_PERIOD))
#define SG90_LEFT ((int)(2.5/20*TIM3_PWM_SG90_PERIOD))
void TIM3_Int_Init(u16 arr,u16 psc);
void TIM3_PWM_SG90_Init(u16 arr,u16 psc);
#endif
car.c
#include "car.h"
void TIM1_Int_Init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE); //ʱ��ʹ��
TIM_TimeBaseStructure.TIM_Period = arr; //��������һ�������¼�װ�����Զ���װ�ؼĴ������ڵ�ֵ
TIM_TimeBaseStructure.TIM_Prescaler =psc; //����������ΪTIMxʱ��Ƶ�ʳ�����Ԥ��Ƶֵ
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //����ʱ�ӷָ�:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM���ϼ���ģʽ
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); //����TIM_TimeBaseInitStruct��ָ���IJ�����ʼ��TIMx��ʱ�������λ
TIM_ITConfig(TIM1,TIM_IT_Update,ENABLE ); //ʹ��ָ����TIM1�ж�,���������ж�
NVIC_InitStructure.NVIC_IRQChannel = TIM3_UP_IRQn; //TIM3�ж�
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //��ռ���ȼ�0��
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //�����ȼ�3��
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQͨ����ʹ��
NVIC_Init(&NVIC_InitStructure); //����NVIC_InitStruct��ָ���IJ�����ʼ������NVIC�Ĵ���
TIM_Cmd(TIM1, ENABLE); //ʹ��TIMx����
}
//��ʱ��1�жϷ������
void TIM1_UP_IRQHandler(void) //TIM1�ж�
{
if (TIM_GetITStatus(TIM1, TIM_IT_Update) != RESET) //���ָ����TIM�жϷ������:TIM �ж�Դ
{
TIM_ClearITPendingBit(TIM1, TIM_IT_Update ); //���TIMx���жϴ�����λ:TIM �ж�Դ
PWMA = !PWMA;
PWMB = !PWMB;
}
}
void TB6612_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //ʹ��PB�˿�ʱ��
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //�������
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO���ٶ�Ϊ50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //�����趨������ʼ��
GPIO_ResetBits(GPIOB,GPIO_Pin_6|GPIO_Pin_9);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12|GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //�������
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO���ٶ�Ϊ50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //�����趨������ʼ��
GPIO_ResetBits(GPIOB,GPIO_Pin_12|GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15);
}
void go_straight(void)
{
AIN1 = 1;
AIN2 = 0;
BIN1 = 1;
BIN2 = 0;
}
void go_back(void)
{
AIN1 = 0;
AIN2 = 1;
BIN1 = 0;
BIN2 = 1;
}
void ture_right(void)
{
AIN1 = 1;
AIN2 = 0;
BIN1 = 0;
BIN2 = 1;
}
void ture_left(void)
{
AIN1 = 0;
AIN2 = 1;
BIN1 = 1;
BIN2 = 0;
}
void stop(void)
{
AIN1 = 0;
AIN2 = 0;
BIN1 = 0;
BIN2 = 0;
}car.h
#ifndef __CAR_H__
#define __CAR_H__
#include "sys.h"
#include "delay.h"
#define PWMA PBout(6)
#define PWMB PBout(9)
#define AIN1 PBout(14)
#define AIN2 PBout(13)
#define BIN1 PBout(15)
#define BIN2 PBout(12)
void TIM3_Int_Init(u16 arr,u16 psc);
void TB6612_GPIO_Init(void);
void go_straight(void);
void ture_left(void);
void go_back(void);
void ture_right(void);
void stop(void);
#endif
ultrasonic.c
#include "ultrasonic.h"
/*��¼��ʱ���������*/
unsigned int overcount = 0;
void ultrasonic_gpio_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(TRIG_RCC, ENABLE);
RCC_APB2PeriphClockCmd(ECHO_RCC, ENABLE);
GPIO_InitStructure.GPIO_Pin = TRIG_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(TRIG_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = ECHO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;
GPIO_Init(ECHO_PORT, &GPIO_InitStructure);
}
void TIM2_Ultrasonic_Init(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructer;
NVIC_InitTypeDef NVIC_InitStructer;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
/*��ʱ��TIM2��ʼ��*/
TIM_DeInit(TIM2);
TIM_TimeBaseInitStructer.TIM_Period = 999;//��ʱ����Ϊ1000
TIM_TimeBaseInitStructer.TIM_Prescaler = 71; //��Ƶϵ��72
TIM_TimeBaseInitStructer.TIM_ClockDivision = TIM_CKD_DIV1;//����Ƶ
TIM_TimeBaseInitStructer.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructer);
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);//���������ж�
/*��ʱ���жϳ�ʼ��*/
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitStructer.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStructer.NVIC_IRQChannelSubPriority = 2;
NVIC_InitStructer.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructer.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructer);
TIM_Cmd(TIM2, DISABLE);//�رն�ʱ��ʹ��
}
void TIM2_IRQHandler(void) //�ж�,�������źźܳ���,����ֵ������ظ�����,���ж��������������
{
if(TIM_GetITStatus(TIM2,TIM_IT_Update) != RESET)
{
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);//����жϱ�־
overcount++;
}
}
float get_ultrasonic_distance(void)
{
float distance = 0;
u16 tim;
GPIO_SetBits(TRIG_PORT, TRIG_PIN); //�����ź�,��Ϊ�����ź�
delay_us(20); //�ߵ�ƽ�źų���10us
GPIO_ResetBits(TRIG_PORT, TRIG_PIN);
/*�ȴ������ź�*/
while(GPIO_ReadInputDataBit(ECHO_PORT, ECHO_PIN) == RESET);
TIM_Cmd(TIM2,ENABLE);//�����źŵ���,������ʱ������
while(GPIO_ReadInputDataBit(ECHO_PORT, ECHO_PIN) == SET);//�����ź���ʧ
TIM_Cmd(TIM2, DISABLE);//�رն�ʱ��
tim = TIM_GetCounter(TIM2);//��ȡ��TIM2���Ĵ����еļ���ֵ,һ��������ź�ʱ��
distance = (tim + overcount * 1000) / 58.0;//ͨ�������źż������
TIM2->CNT = 0; //��TIM2�����Ĵ����ļ���ֵ����
overcount = 0; //������������
delay_ms(1);
return distance; //������Ϊ��������ֵ
}
void bubble(unsigned long *a, int n)
{
int i, j, temp;
for (i = 0; i < n - 1; i++)
{
for (j = i + 1; j < n; j++)
{
if (a[i] > a[j])
{
temp = a[i];
a[i] = a[j];
a[j] = temp;
}
}
}
}
float get_average_distance(void)
{
float Distance;
unsigned long ultrasonic[5] = {0};
int a,num = 0;
int lastDistance;
while (num < 5)
{
Distance = get_ultrasonic_distance();
while(((int)Distance >= 500 || (int)Distance == 0))
{
Distance = get_ultrasonic_distance();
}
if(Distance >0 || (int)Distance <500)
{
ultrasonic[num] = Distance;
//lastDistance=Distance;
num++;
delay_ms(10);
}
}
num = 0;
bubble(ultrasonic, 5);
Distance = (ultrasonic[1] + ultrasonic[2] + ultrasonic[3]) / 3;
return Distance;
//printf("Distance=%d\n",Distance);
}ultrasonic.h
#ifndef __ULTRASONIC_H__
#define __ULTRASONIC_H__
#include "delay.h"
#include "sys.h"
#define TRIG_RCC RCC_APB2Periph_GPIOB
#define ECHO_RCC RCC_APB2Periph_GPIOB
#define TRIG_PIN GPIO_Pin_8
#define ECHO_PIN GPIO_Pin_7
#define TRIG_PORT GPIOB
#define ECHO_PORT GPIOB
void ultrasonic_gpio_init(void);
void TIM2_Ultrasonic_Init(void);
float get_ultrasonic_distance(void);
void bubble(unsigned long *a, int n);
float get_average_distance(void);
#endif
main.c
#include "led.h"
#include "delay.h"
#include "sys.h"
#include "pwm.h"
#include "lcd1602.h"
#include "ultrasonic.h"
#include <stdio.h>
#include <string.h>
#include "car.h"
u8 display_buf[16] = {0};
int main(void)
{
float left_distance = 0.0;
float right_distance = 0.0;
float current_distance = 0.0;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
delay_init();
LED_Init();
LCD1602_Init();
TIM3_PWM_SG90_Init(TIM3_PWM_SG90_PERIOD,TIM3_PWM_SG90_PRESCALER);//PWMƵ��=72000/((1200)*(1200))=50hz
ultrasonic_gpio_init();
TIM2_Ultrasonic_Init();
TB6612_GPIO_Init();
TIM1_Int_Init(719, 0);//72000000/720 = 100KHz
TIM_SetCompare2(TIM3, SG90_CENTRE);
delay_ms(1000);
while(1)
{
current_distance = get_average_distance();
sprintf((char *)display_buf, "dis:%3.0fcm ", current_distance);
LCD1602_Show_Str(0,0,display_buf, strlen((char *)display_buf));
if(current_distance <= 30.0) //������30cm
{
stop(); //ֹͣ
delay_ms(100);
TIM_SetCompare2(TIM3, SG90_LEFT); //�����ת
delay_ms(1000);
left_distance = get_average_distance(); //�õ���ߵľ���
TIM_SetCompare2(TIM3, SG90_RIGHT); //��ת
delay_ms(1000);
right_distance = get_average_distance(); //�õ��ұߵľ���
TIM_SetCompare2(TIM3, SG90_CENTRE);
delay_ms(1000);
if(left_distance > right_distance)
{
go_back();
delay_ms(600);
ture_left();
delay_ms(300);
}
else
{
go_back();
delay_ms(600);
ture_right();
delay_ms(300);
}
}
else
{
go_straight();
}
}
}
ע:����Դ���ģ��ο�����ԭ��stm32f103ϵ�б���档