1.������
(1)���ƽ̨:Keil5
(2)CubeMX
(3)XCOM(���ڵ�������)
(4)�ļ����ϰ�:�����ת����
2.Ӳ����
(1)һ��������MPU6050

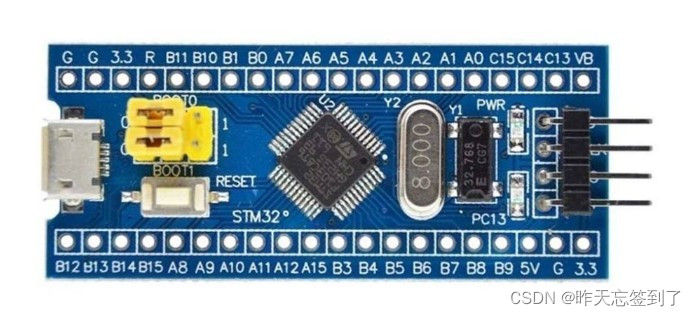
(2)F1�İ���,����ʹ�þ���F103C8T6
(3)ST-link?������

(4)USB-TTLģ��

(5)��������
3.ģ������
(1)ģ����:
????????MPU-6000Ϊȫ������������6���˶��������,����ڶ��������,���������������������ʱ֮���������,�����˴����İ�װ�ռ䡣MPU-6000������3�������ǡ�3�������,�����ɽ��ɵڶ���I2C�˿�������������֮������������������������������������λ�˶�����(DMP:Digital MotionProcessor)Ӳ����������,����ҪI2C�˿��Ե�һ����������ʽ,��Ӧ�ö����������9���ں����㼼��
????????MPU-6000�Ľ��ٶ�ȫ��вⷶΧΪ��250�� ��500����1000���2000�� /sec (dps),��ȷ�h���������ٶ���,����,�û��ɳ�ʽ���Ƶļ�����ȫ��вⷶΧΪ��2g����4g�� 8g��� 16g����Ʒ������������400kHz��I2C����ߴ�20MHz��SPI��
(2)���ֲ���:
��ʹ��оƬ��:MPU-6050
�������Դ��:3-5V(�ڲ���ѹ����ѹ)
��ͨ�ŷ�ʽ��:��IICͨ��Э��
��оƬ���á�:16bit ADת����
�������Ƿ�Χ��:�� 250 500 1000 2000 ��/s
�����ٶȷ�Χ��: ��2��4��8��16g?
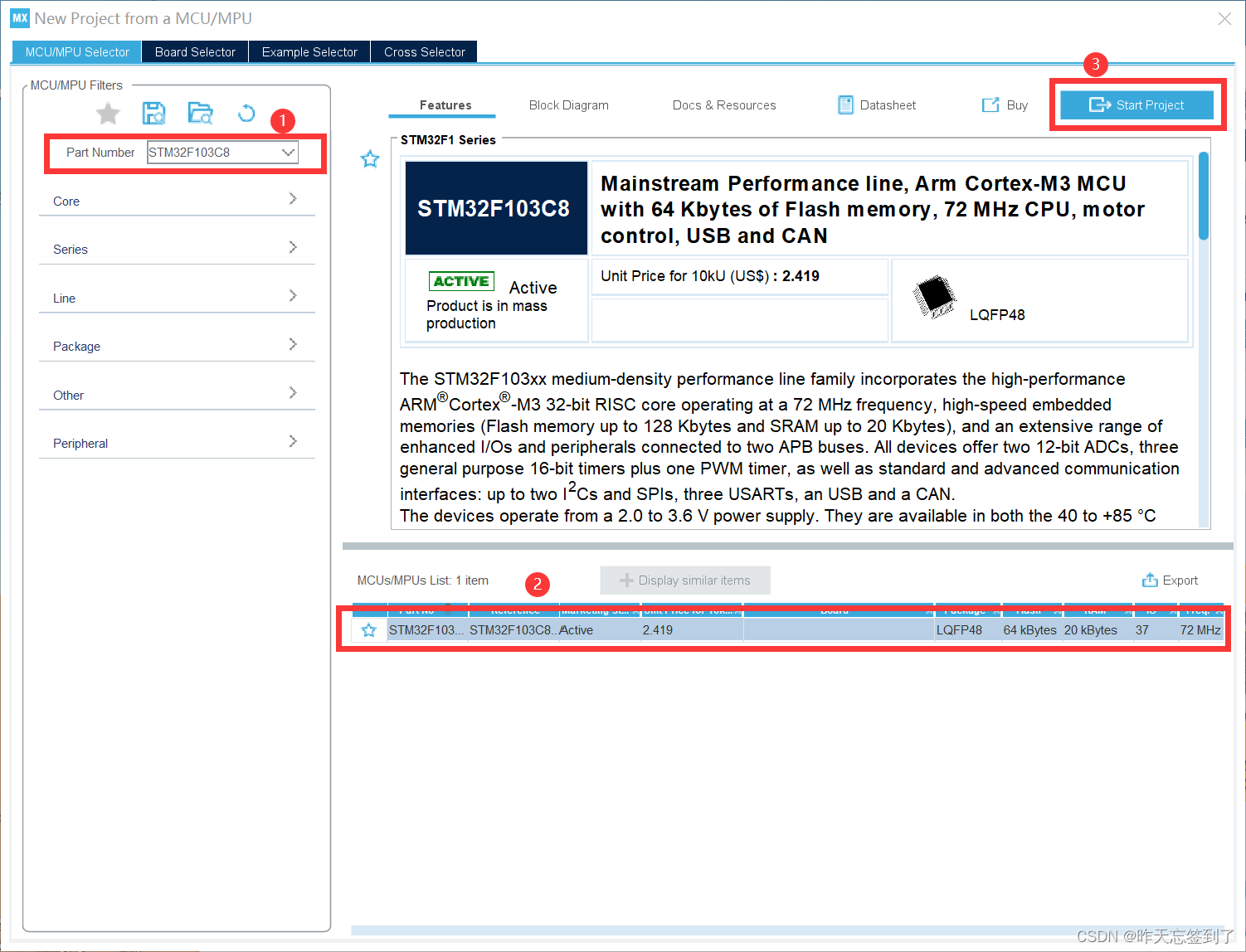
4.CubeMX����
(1)оƬѡ��
?(2)����RCC��SYS��ʱ����
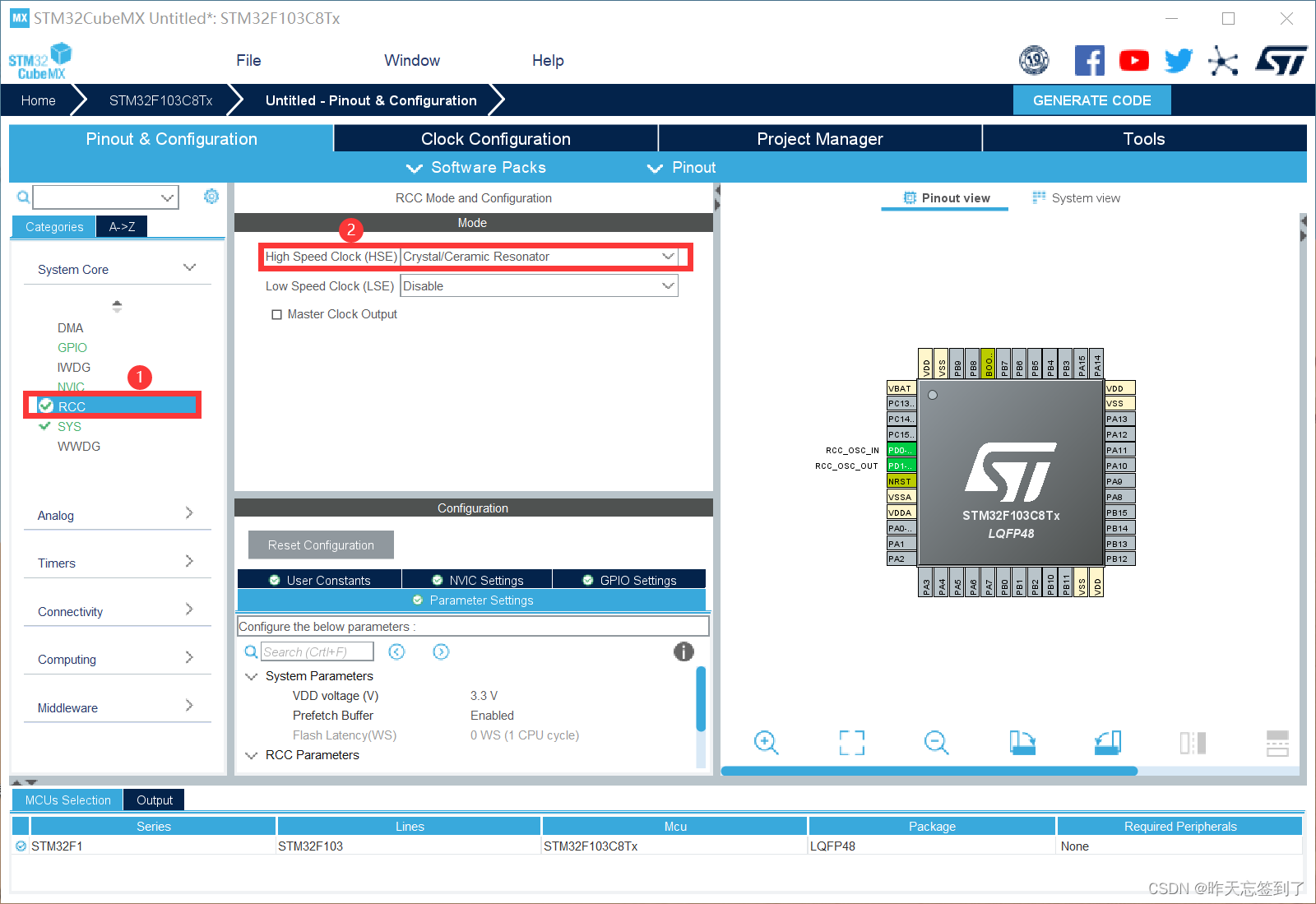
����RCC
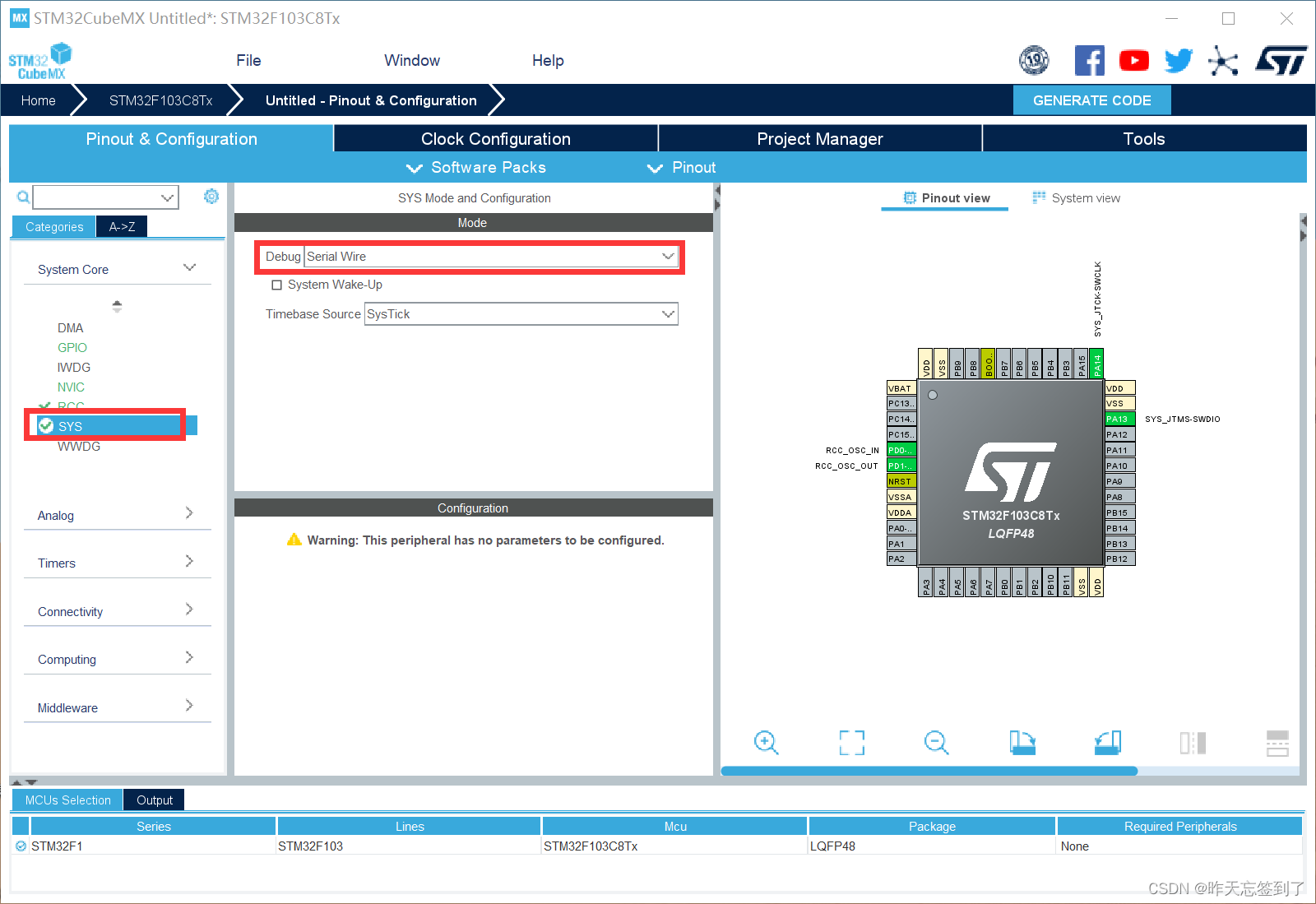
����SYS
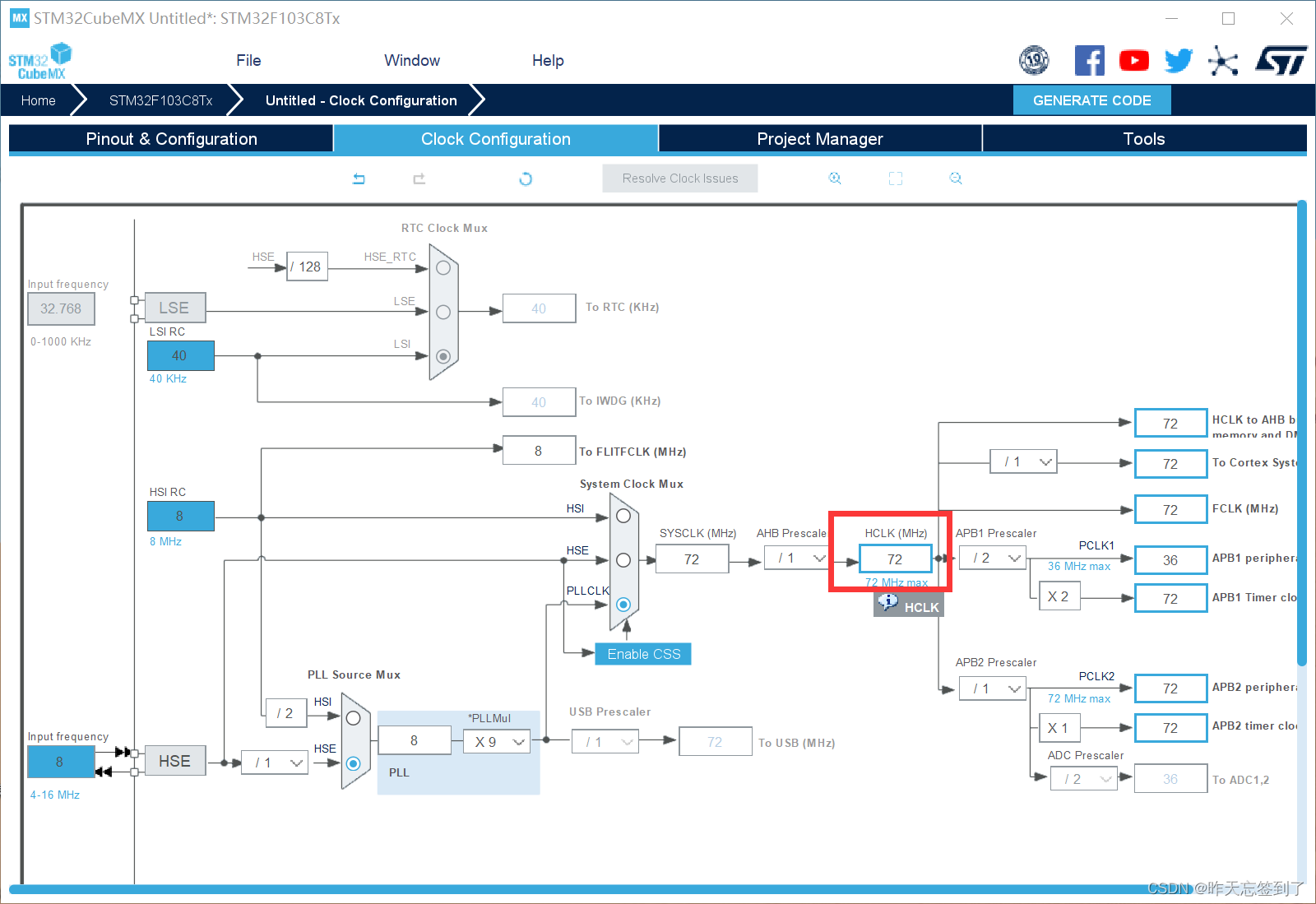
����ʱ����
(3)����GPIO?

?
(4)����1

?
(5)����·�������ɴ��빤��
(6)��ѹ�ļ�

?
5��Keil5����
(1)��ѡUse?MicroLIB

(2)�����ļ�

?(3)����ͷ�ļ�·��

?(4)usrat.c��������
/* USER CODE BEGIN 0 */
#include "stdio.h"
/* USER CODE END 0 */
/* USER CODE BEGIN 1 */
/*********************************************************
*
*�ض��� fputc ����
*
*********************************************************/
int fputc(int ch,FILE *f)
{
HAL_UART_Transmit (&huart1 ,(uint8_t *)&ch,1,HAL_MAX_DELAY );
return ch;
}
/* USER CODE END 1 */(5)main����
#include "stdio.h"
#include "IIC.h"
#include "mpu6050.h"
#include "inv_mpu.h"
#include "inv_mpu_dmp_motion_driver.h"
//========================================================================
int main(void)
{
/* USER CODE BEGIN 1 */
float pitch,roll,yaw; //ŷ����
short aacx,aacy,aacz; //���ٶȴ�����ԭʼ����
short gyrox,gyroy,gyroz; //������ԭʼ����
float temp; //�¶�
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
MPU_Init(); //MPU6050��ʼ��
mpu_dmp_init(); //dmp��ʼ��
/* USER CODE END 2 */
printf("��ʼ���ɹ�!\r\n");
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
HAL_Delay(500);
while(mpu_dmp_get_data(&pitch, &roll, &yaw)); //����Ҫ��while�ȴ�,���ܶ�ȡ�ɹ�
MPU_Get_Accelerometer(&aacx,&aacy, &aacz); //�õ����ٶȴ���������
MPU_Get_Gyroscope(&gyrox, &gyroy, &gyroz); //�õ�����������
temp=MPU_Get_Temperature(); //�õ��¶���Ϣ
printf("X:%.1f�� Y:%.1f�� Z:%.1f�� %.2f��C\r\n",roll,pitch,yaw,temp/100);//����1����ɼ���Ϣ
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}6.����ͼ��Ч��

?

?

?
