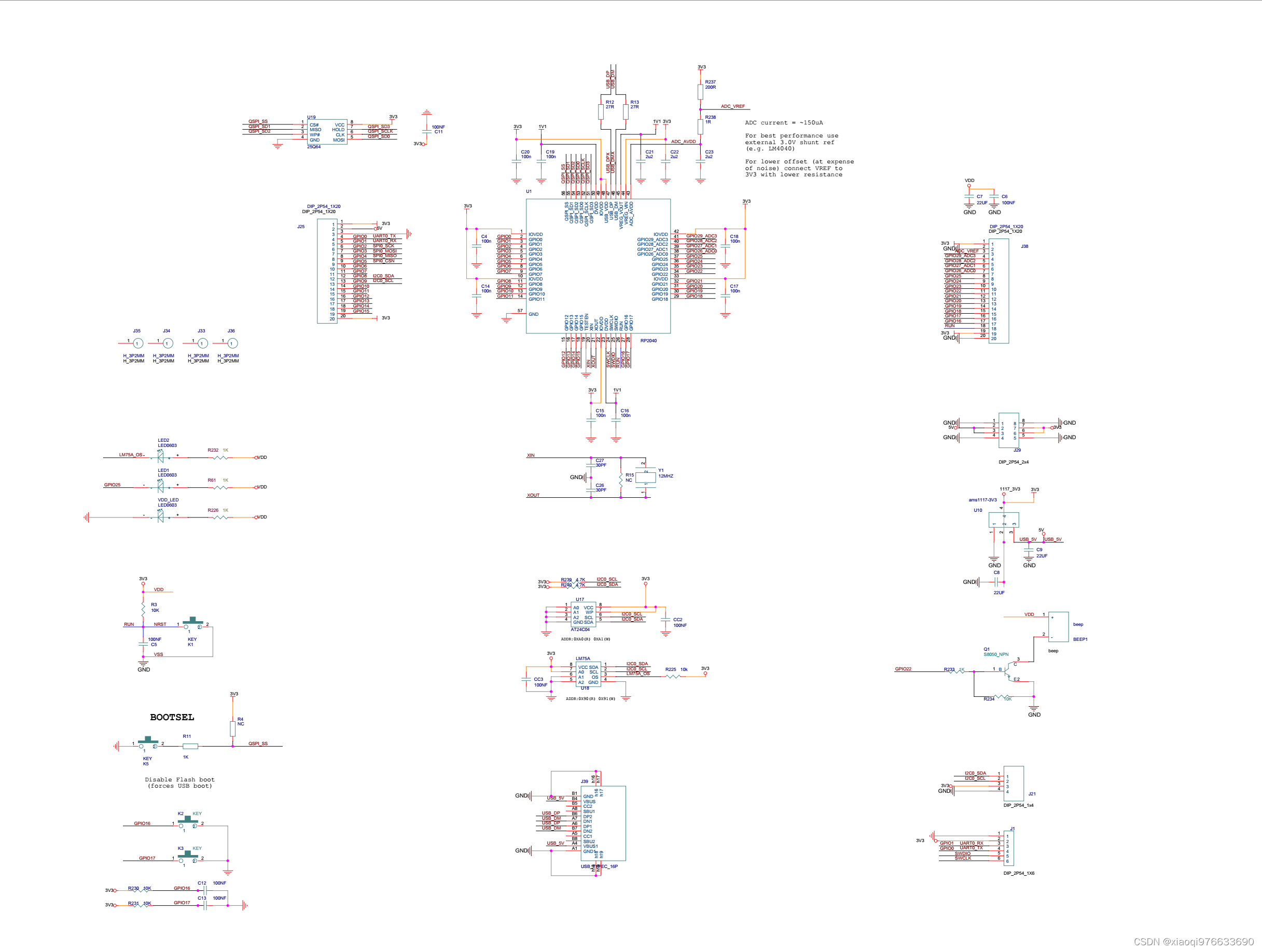
1.原理图
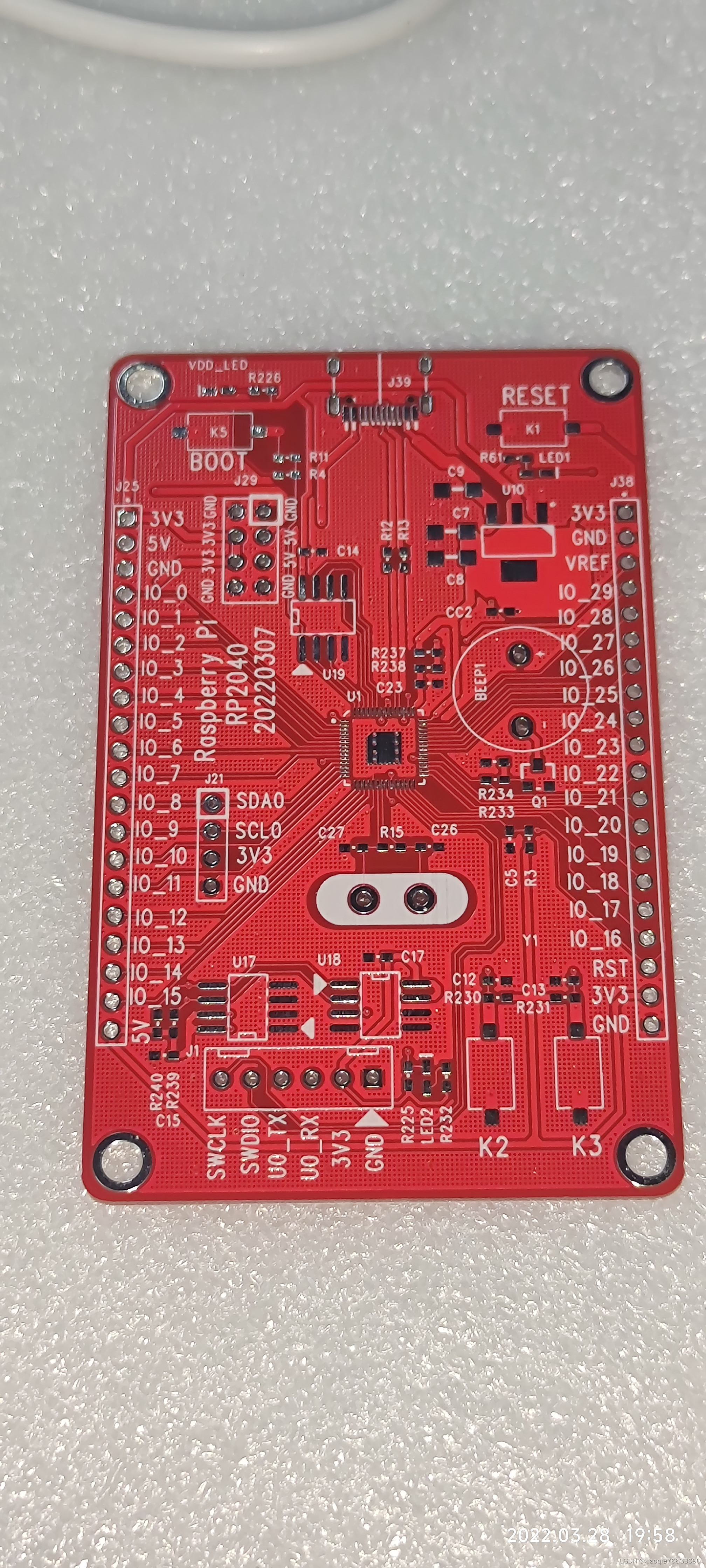
2.PCB
晶振的焊盘有点大,怕和外壳短路,找了个东西垫高了下
来自嘉立创免费打样PCB
3.焊接完成
这颗QFN封装芯片比较考验焊接功底,手残的不建议自己弄。

4.代码实现
参考https://pico.org.cn/
1.main.py
from machine import Pin ,I2C
from utime import sleep
import utime
import lm75a
import ahtx0
i=machine.unique_id()#获取芯片ID
led = Pin(25, Pin.OUT)
print("你好。。。" , i)
KEY2 = Pin(16, Pin.IN, Pin.PULL_UP)
KEY2.irq(lambda pin: external_interrupt(),Pin.IRQ_FALLING)#按键中断
i2c = I2C(0, scl=Pin(9), sda=Pin(8), freq=100000)
#根据已有挂载i2c设备增减i2c.scan()[] 我挂载了3个就打印3个,否则报错
print("所有I2C Address : ", hex(i2c.scan()[0]).upper(),
hex(i2c.scan()[1]).upper(),
hex(i2c.scan()[2]).upper()) # Display device address
sensor_LM75 = lm75a.LM75A(i2c)
sensor_AHT20 = ahtx0.AHT20(i2c)
def external_interrupt():
led.toggle()
print('按键中断',led.value())
print("AHT20实时温度: %0.2f C" % sensor_AHT20.temperature)
print("AHT20实时湿度: %0.2f %%" % sensor_AHT20.relative_humidity)
if __name__ == '__main__':
while True:
led.value(1)# led off
utime.sleep_ms(1000)
led.value(0)# led on
utime.sleep_ms(1000)
print("LM75实时温度检测:%0.2f C" % sensor_LM75.temp())
#print("AHT20实时温度: %0.2f C" % sensor_AHT20.temperature)
#print("AHT20实时湿度: %0.2f %%" % sensor_AHT20.relative_humidity)
2. AHTX0.PY
# The MIT License (MIT)
#
# Copyright (c) 2020 Kattni Rembor for Adafruit Industries
# Copyright (c) 2020 Andreas Bühl
#
# Permission is hereby granted, free of charge, to any person obtaining a copy
# of this software and associated documentation files (the "Software"), to deal
# in the Software without restriction, including without limitation the rights
# to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
# copies of the Software, and to permit persons to whom the Software is
# furnished to do so, subject to the following conditions:
#
# The above copyright notice and this permission notice shall be included in
# all copies or substantial portions of the Software.
#
# THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
# IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
# FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
# AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
# LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
# OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
# THE SOFTWARE.
"""
MicroPython driver for the AHT10 and AHT20 Humidity and Temperature Sensor
Author(s): Andreas Bühl, Kattni Rembor
"""
import utime
from micropython import const
class AHT10:
"""Interface library for AHT10/AHT20 temperature+humidity sensors"""
AHTX0_I2CADDR_DEFAULT = const(0x38) # Default I2C address
AHTX0_CMD_INITIALIZE = 0xE1 # Initialization command
AHTX0_CMD_TRIGGER = const(0xAC) # Trigger reading command
AHTX0_CMD_SOFTRESET = const(0xBA) # Soft reset command
AHTX0_STATUS_BUSY = const(0x80) # Status bit for busy
AHTX0_STATUS_CALIBRATED = const(0x08) # Status bit for calibrated
def __init__(self, i2c, address=AHTX0_I2CADDR_DEFAULT):
utime.sleep_ms(20) # 20ms delay to wake up
self._i2c = i2c
self._address = address
self._buf = bytearray(6)
self.reset()
if not self.initialize():
raise RuntimeError("Could not initialize")
self._temp = None
self._humidity = None
def reset(self):
"""Perform a soft-reset of the AHT"""
self._buf[0] = self.AHTX0_CMD_SOFTRESET
self._i2c.writeto(self._address, self._buf[0:1])
utime.sleep_ms(20) # 20ms delay to wake up
def initialize(self):
"""Ask the sensor to self-initialize. Returns True on success, False otherwise"""
self._buf[0] = self.AHTX0_CMD_INITIALIZE
self._buf[1] = 0x08
self._buf[2] = 0x00
self._i2c.writeto(self._address, self._buf[0:3])
self._wait_for_idle()
if not self.status & self.AHTX0_STATUS_CALIBRATED:
return False
return True
@property
def status(self):
"""The status byte initially returned from the sensor, see datasheet for details"""
self._read_to_buffer()
return self._buf[0]
@property
def relative_humidity(self):
"""The measured relative humidity in percent."""
self._perform_measurement()
self._humidity = (
(self._buf[1] << 12) | (self._buf[2] << 4) | (self._buf[3] >> 4)
)
self._humidity = (self._humidity * 100) / 0x100000
return self._humidity
@property
def temperature(self):
"""The measured temperature in degrees Celcius."""
self._perform_measurement()
self._temp = ((self._buf[3] & 0xF) << 16) | (self._buf[4] << 8) | self._buf[5]
self._temp = ((self._temp * 200.0) / 0x100000) - 50
return self._temp
def _read_to_buffer(self):
"""Read sensor data to buffer"""
self._i2c.readfrom_into(self._address, self._buf)
def _trigger_measurement(self):
"""Internal function for triggering the AHT to read temp/humidity"""
self._buf[0] = self.AHTX0_CMD_TRIGGER
self._buf[1] = 0x33
self._buf[2] = 0x00
self._i2c.writeto(self._address, self._buf[0:3])
def _wait_for_idle(self):
"""Wait until sensor can receive a new command"""
while self.status & self.AHTX0_STATUS_BUSY:
utime.sleep_ms(5)
def _perform_measurement(self):
"""Trigger measurement and write result to buffer"""
self._trigger_measurement()
self._wait_for_idle()
self._read_to_buffer()
class AHT20(AHT10):
AHTX0_CMD_INITIALIZE = 0xBE # Calibration command
3.LM75A.PY
"""
MicroPython LM75A Digital Temperature Sensor
https://github.com/mcauser/micropython-lm75a
MIT License
Copyright (c) 2019 Mike Causer
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
SOFTWARE.
"""
__version__ = '0.0.3'
# registers
_LM75A_TEMP = const(0x00) # Temperature register (r) 16-bit
_LM75A_CONF = const(0x01) # Configuration register (r/w) 8-bit, default: enabled, comparator, os active low, single fault
_LM75A_THYST = const(0x02) # Hysteresis register (r/w) 16-bit, default: 75°C
_LM75A_TOS = const(0x03) # Overtemperature shutdown register (r/w) 16-bit, default: 80°C
class LM75A:
def __init__(self, i2c, address=0x49):
self._i2c = i2c
self._address = address # 0x48-0x4F
self._config = 0x00
self._buf1 = bytearray(1)
self._buf2 = bytearray(2)
self.check()
self.config()
def check(self):
if self._i2c.scan().count(self._address) == 0:
raise OSError('LM75A not found at I2C address {:#x}'.format(self._address))
def config(self, shutdown=None, os_mode=None, os_polarity=None, os_fault_queue=None):
if shutdown is not None:
self._config = (self._config & ~1) | (shutdown & 1)
if os_mode is not None:
self._config = (self._config & ~2) | ((os_mode << 1) & 2)
if os_polarity is not None:
self._config = (self._config & ~4) | ((os_polarity << 2) & 4)
if os_fault_queue is not None:
self._config = (self._config & ~24) | ((os_fault_queue << 3) & 24)
self._buf1[0] = self._config
self._i2c.writeto_mem(self._address, _LM75A_CONF, self._buf1)
def temp(self):
self._i2c.readfrom_mem_into(self._address, _LM75A_TEMP, self._buf2)
val = (self._buf2[0] << 3) | (self._buf2[1] >> 5)
return self._twos_comp(val, 11) * 0.125
def tos(self, temp):
self._temp_to_9bit_reg(temp)
self._i2c.writeto_mem(self._address, _LM75A_TOS, self._buf2)
def thyst(self, temp):
self._temp_to_9bit_reg(temp)
self._i2c.writeto_mem(self._address, _LM75A_THYST, self._buf2)
def _twos_comp(self, val, bits):
mask = 2 ** (bits - 1)
return -(val & mask) + (val & ~mask)
def _rev_twos_comp(self, val, bits):
return val & ((1 << bits) -1)
def _temp_to_9bit_reg(self, temp):
val = self._rev_twos_comp(int(temp / 0.5), 9)
self._buf2[0] = val >> 1
self._buf2[1] = val << 7
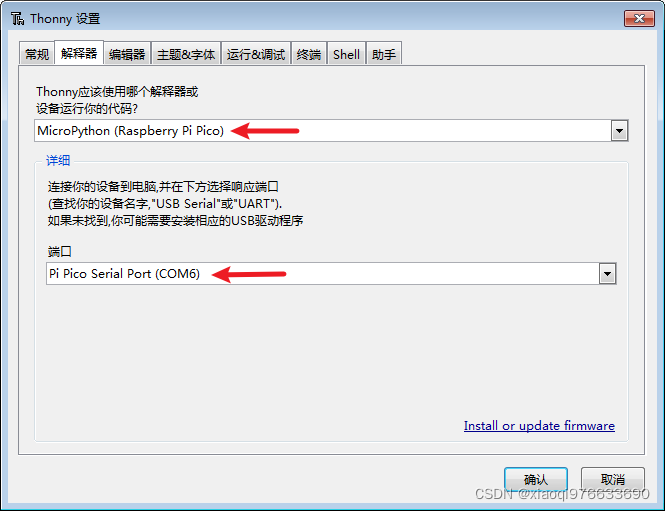
5.Thonne IDE
将代码保存到pico里

6.注意事项
WIN7 下需要额外装CDC驱动,不想找驱动的的可以复制下面另存为xxx.inf文件 然后进设备管理器里更新。
; Windows 2000, XP, Vista, 7 and 8 (x32 and x64) setup file for Atmel CDC Devices
; Copyright (c) 2000-2013 ATMEL, Inc.
[Version]
Signature = "$Windows NT$"
Class = Ports
ClassGuid = {4D36E978-E325-11CE-BFC1-08002BE10318}
Provider = %Manufacturer%
LayoutFile = layout.inf
CatalogFile = atmel_devices_cdc.cat
DriverVer = 01/08/2013,6.0.0.0
;----------------------------------------------------------
; Targets
;----------------------------------------------------------
[Manufacturer]
%Manufacturer%=DeviceList, NTAMD64, NTIA64, NT
[DeviceList]
%PI_CDC_PICO%=DriverInstall, USB\VID_2E8A&PID_0005&MI_00
[DeviceList.NTAMD64]
%PI_CDC_PICO%=DriverInstall, USB\VID_2E8A&PID_0005&MI_00
[DeviceList.NTIA64]
%PI_CDC_PICO%=DriverInstall, USB\VID_2E8A&PID_0005&MI_00
[DeviceList.NT]
%PI_CDC_PICO%=DriverInstall, USB\VID_2E8A&PID_0005&MI_00
;----------------------------------------------------------
; Windows 2000, XP, Vista, Windows 7, Windows 8 - 32bit
;----------------------------------------------------------
[Reader_Install.NTx86]
[DestinationDirs]
DefaultDestDir=12
DriverInstall.NT.Copy=12
[DriverInstall.NT]
include=mdmcpq.inf
CopyFiles=DriverInstall.NT.Copy
AddReg=DriverInstall.NT.AddReg
[DriverInstall.NT.Copy]
usbser.sys
[DriverInstall.NT.AddReg]
HKR,,DevLoader,,*ntkern
HKR,,NTMPDriver,,usbser.sys
HKR,,EnumPropPages32,,"MsPorts.dll,SerialPortPropPageProvider"
[DriverInstall.NT.Services]
AddService = usbser, 0x00000002, DriverService.NT
[DriverService.NT]
DisplayName = %Serial.SvcDesc%
ServiceType = 1 ; SERVICE_KERNEL_DRIVER
StartType = 3 ; SERVICE_DEMAND_START
ErrorControl = 1 ; SERVICE_ERROR_NORMAL
ServiceBinary = %12%\usbser.sys
LoadOrderGroup = Base
;----------------------------------------------------------
; Windows XP, Vista, Windows 7, Windows 8 - 64bit
;----------------------------------------------------------
[DriverInstall.NTamd64]
include=mdmcpq.inf
CopyFiles=DriverCopyFiles.NTamd64
AddReg=DriverInstall.NTamd64.AddReg
[DriverCopyFiles.NTamd64]
usbser.sys,,,0x20
[DriverInstall.NTamd64.AddReg]
HKR,,DevLoader,,*ntkern
HKR,,NTMPDriver,,usbser.sys
HKR,,EnumPropPages32,,"MsPorts.dll,SerialPortPropPageProvider"
[DriverInstall.NTamd64.Services]
AddService=usbser, 0x00000002, DriverService.NTamd64
[DriverService.NTamd64]
DisplayName=%Serial.SvcDesc%
ServiceType=1
StartType=3
ErrorControl=1
ServiceBinary=%12%\usbser.sys
;----------------------------------------------------------
; String
;----------------------------------------------------------
[Strings]
Manufacturer = "ATMEL, Inc."
PI_CDC_PICO = "Pi Pico Serial Port"
Serial.SvcDesc = "Pi Pico Serial Driver"
7.参考
1.https://pico.org.cn 树莓派pico 中文站
2.https://awesome-micropython.com/ Awesome MicroPython库
3.https://www.runoob.com/python/python-tutorial.html Python基础教程
4.https://docs.singtown.com/micropython/zh/latest/pyboard/library/index.html MicroPython教程