STM32 �еĵ�һ�������ǿ��ƺ�����,��������������кܼ�,���Ƶ��ǰ���PA8,���������һ���Լ���LED����Ҫ��һ���˽�PWM���趨��,����Ҫ֪��,PWM��Timer�趨�Ļ�����������4��ר�üĴ�����ɵ�,��ȻĿ�ľ���ʵ���������ơ�
������Ҫ���һ������ ����PWM���ɵķ��� ͨ������ TIMx_PWM_Init(u16 arr,u16 psc),��ʹ�ö�ʱ��1 �ͽ���TIM1_PWM_Init(u16 arr,u16 psc),������ʹ�õ���Timer1,�����ﻻһ��Timer,���⾡����Ҫʹ��Timer1 ��Ϊ1�Ǹ���ʱ��,���һ�������ͨѶ�ȹ���,����ʹ��2-5����ͨ��ʱ��,ʹ��2��,��ΪTimer2 stm32����һ���е�, (51����);
�洢TIM2_PWM_Init(u16 arr,u16 psc)������.c ��.h ���ص�༭�Ķ���
��pwm.c ֻ��Ҫ�����Լ��Ϳ�����,#include ��pwm.h��,����Ҫ���� GPIO ʹ�ܶ�ʱ��,ʹ��PWM���,�������֡�
��void TIM2_PWM_Init(u16 arr,u16 psc) �����һ����ʼ���ķ���,��߾����������������ݡ�
�ڿ�ԭ��ͼѡ������
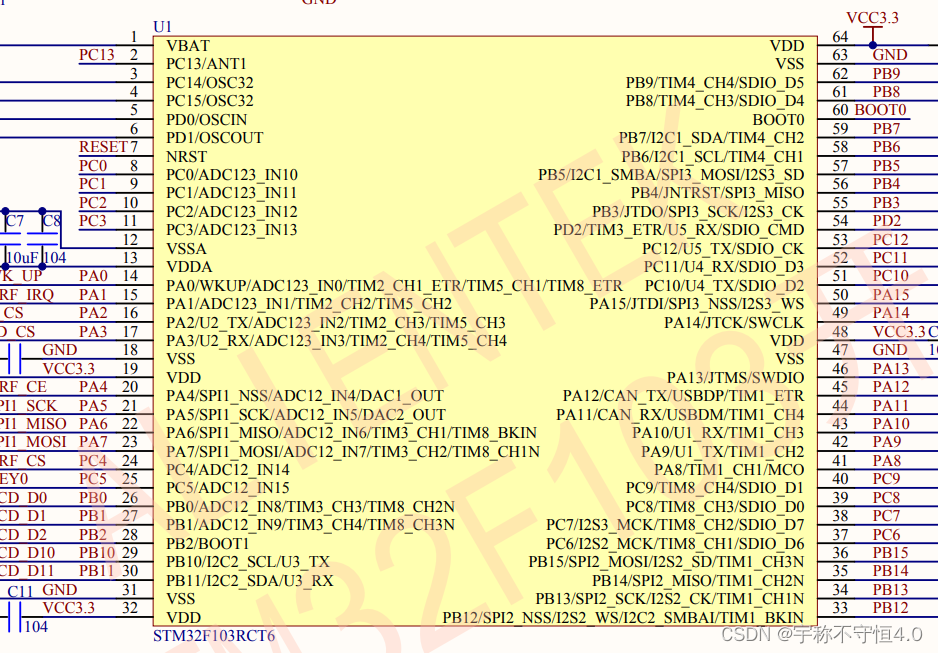
����������Timer2 ������PA2 PA3,��������û�еڶ�������ʱ����
�۶��������ṹ��,��Ӧ�ľ��� GPIO���á�Timer���ú� PWM(TimOC)����
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
��GPIO����:
ʹ���ⲿʱ��
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
APB1���ص�������,APB2��AHB���ظ�������,����TIM1��GPIO �� APB2��,TIM3��APB1��,��ȻҲ�������е�IOһ���ʼ��
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB, ENABLE);
�����ʼ��TIM1Ҫʹ��APB2�ķ�����
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);//
������GPIO�˿�����,����ǰ��ͬ,ע��ʹ�ø���ģʽ
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; //TIM_CH1
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3; //TIM_CH1
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
������Ҫ���ö�ʱ����
TIM_TimeBaseStructure.TIM_Period = arr;
TIM_TimeBaseStructure.TIM_Prescaler =psc;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure);
��ߵ����ڡ�Ԥ��Ƶ����Ͳ�����
��Ȼ����PWM�Ĵ�������
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 0; /
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC3Init(TIM2, &TIM_OCInitStructure);
TIM_OC4Init(TIM2, &TIM_OCInitStructure);
Ҫ����ԭ��ͼ���� PA2 PA3 ��Ӧ�� TIMOC CH3 CH4ͨ��~
�ߺ������ʹ����
TIM_CtrlPWMOutputs(TIM2,ENABLE);
TIM_OC3PreloadConfig(TIM2, TIM_OCPreload_Enable);
TIM_OC4PreloadConfig(TIM2, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM2, ENABLE);
TIM_Cmd(TIM2, ENABLE);
����PWM����������,����ͨ��TIM2_PWM_Init(arr,psc) ����PWM��
���������еĶ�Ӧ
int main(void)
{
u16 led0pwmval=0;
u8 dir=1;
delay_init();
TIM2_PWM_Init(899,0);//72000/(899+1)=80Khz
while(1)
{
delay_ms(10);
if(dir)led0pwmval++;
else led0pwmval�C;
if(led0pwmval>300)dir=0;
if(led0pwmval==0)dir=1;
TIM_SetCompare3(TIM2,led0pwmval);
TIM_SetCompare4(TIM2,led0pwmval);
}
}
������Ҫע��,��һʵ�ּ��㹦��,����PWM������Ҫ��ʱ�仯,�ڶ�ͨ��TIM_SetCompareX��ʵ�ָù���,��������������ͨ��CH3 CH4Ҫ�䡣
��������,���º�����Ч����