1. eCANФЃПщGPIOГѕЪМЛЏ
void InitECanbGpio(void)
{
EALLOW;//ХфжУGPIOв§НХЙЄзїдкeCANЙІФм
GpioCtrlRegs.GPAPUD.bit.GPIO16 = 1; // Disable pull-up for GPIO16 (CANTXB)
GpioCtrlRegs.GPAPUD.bit.GPIO17 = 0; // Enable pull-up for GPIO17 (CANRXB)
GpioCtrlRegs.GPAQSEL2.bit.GPIO17 = 3; // Asynch qual for GPIO17 (CANRXB)
GpioCtrlRegs.GPAMUX2.bit.GPIO16 = 2; // Configure GPIO16 for CANTXB operation
GpioCtrlRegs.GPAMUX2.bit.GPIO17 = 2; // Configure GPIO17 for CANRXB operation
EDIS;
}
????ЪЙгУЕНЕФМФДцЦїШчЯТЫљЪО:

????ЩЯРЪфШыЕФКУДІЪЧМѕаЁСЫЕчСї,ЪфШыЕФЕчЦНВЛЛсЩЯЯТИЁЖЏЖјЕМжТЪфШыаХКХВЛЮШЖЈ,дкУЛгааХКХЪфШыЕФЧщПіЯТПЩвдЮШЖЈдкИпЕчЦНЁЃ


змНс:
- ЪЙФмНгЪев§НХЩЯР,НћгУЗЂЫЭв§НХЩЯР;
- ЩшжУНгЪев§НХЮЊвьВНФЃЪН;
- ЩшжУGPIOв§НХЮЊCANНгЪеЁЂЪфГів§НХЁЃ
2. ГѕЪМЛЏeCanbФЃПщ:InitEcanb
EALLOW; //ХфжУeCANЕФRXКЭTXЗжБ№ЮЊeCANЕФНгЪеКЭЗЂЫЭв§НХ
ECanbShadow.CANTIOC.all = ECanbRegs.CANTIOC.all;
ECanbShadow.CANTIOC.bit.TXFUNC = 1;
ECanbRegs.CANTIOC.all = ECanbShadow.CANTIOC.all;
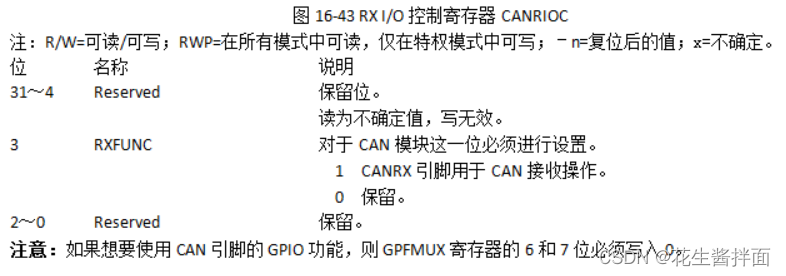
ECanbShadow.CANRIOC.all = ECanbRegs.CANRIOC.all;
ECanbShadow.CANRIOC.bit.RXFUNC = 1;
ECanbRegs.CANRIOC.all = ECanbShadow.CANRIOC.all;
EDIS;
????ЩцМАЕФМФДцЦїШчЯТ:

EALLOW;
ECanbShadow.CANMC.all = ECanbRegs.CANMC.all;
ECanbShadow.CANMC.bit.STM = 0;//ЗЧздВтФЃЪН
ECanbShadow.CANMC.bit.SCB = 1;//eCANФЃЪН
ECanbRegs.CANMC.all = ECanbShadow.CANMC.all;
EDIS;


//ГѕЪМЛЏЫљгажїЩшБИПижЦЧјгђЮЊ0,MCFЫљгаЕФЮЛЖМГѕЪМЛЏЮЊ0
ECanbMboxes.MBOX0.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX1.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX2.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX3.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX4.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX5.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX6.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX7.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX8.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX9.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX10.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX11.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX12.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX13.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX14.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX15.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX16.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX17.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX18.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX19.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX20.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX21.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX22.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX23.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX24.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX25.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX26.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX27.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX28.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX29.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX30.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX31.MSGCTRL.all = 0x00000000;
????НгЯТРДНјааЕФЪЧЯрЙиМФДцЦїЕФжУЮЛЙЄзї,АќРЈгЪЯфЗЂЫЭКЭНгЪеЯрЙиЁЂжаЖЯБъжОЮЛжУЮЛ,ВЂЧыЧѓЖдSCCФЃЪНЯТЕФCANBTCМФДцЦїНјааЩшжУЁЃ
EALLOW;
ECanbShadow.CANTA.all = ECanbRegs.CANTA.all;
ECanbShadow.CANTA.all = 0xFFFFFFFF;
ECanbRegs.CANTA.all = ECanbShadow.CANTA.all;
ECanbShadow.CANRMP.all = ECanbRegs.CANRMP.all;
ECanbShadow.CANRMP.all = 0xFFFFFFFF;
ECanbRegs.CANRMP.all = ECanbShadow.CANRMP.all;
//ЬэМг
ECanbShadow.CANGIF0.all = ECanbRegs.CANGIF0.all;
ECanbShadow.CANGIF0.all = 0xFFFFFFFF;
ECanbRegs.CANGIF0.all = ECanbShadow.CANGIF0.all;
//ЬэМг
ECanbShadow.CANGIF1.all = ECanbRegs.CANGIF1.all;
ECanbShadow.CANGIF1.all = 0xFFFFFFFF;
ECanbRegs.CANGIF1.all = ECanbShadow.CANGIF1.all;
/* Configure bit timing parameters for eCANB*/
ECanbShadow.CANMC.all = ECanbRegs.CANMC.all;
ECanbShadow.CANMC.bit.CCR = 1 ; // Set CCR = 1
ECanbRegs.CANMC.all = ECanbShadow.CANMC.all;
????CANMEМФДцЦїЕФCCEЮЊБЛжУЮЛКѓ,ПЩвдНјааВЈЬиТЪЕФЩшжУСЫЁЃ
do
{ECanbShadow.CANES.all=ECanbRegs.CANES.all;}
while(ECanbShadow.CANES.bit.CCE != 1 ) ; // Wait for CCE bit to be set..
ECanbShadow.CANBTC.all = ECanbRegs.CANBTC.all; //ЬэМг
ECanbShadow.CANBTC.all = 0;
ECanbShadow.CANBTC.bit.BRPREG = 9;
/* TQ=1/(SYSCLKOUT/4)ЁС(BRPREG+1) */
ECanbShadow.CANBTC.bit.TSEG2REG = 2;
ECanbShadow.CANBTC.bit.TSEG1REG = 10;
ECanbShadow.CANBTC.bit.SAM = 1;
ECanbRegs.CANBTC.all = ECanbShadow.CANBTC.all;
ECanbShadow.CANMC.all = ECanbRegs.CANMC.all;
ECanbShadow.CANMC.bit.CCR = 0 ; // Set CCR = 0
ECanbRegs.CANMC.all = ECanbShadow.CANMC.all;
do
{
ECanbShadow.CANES.all = ECanbRegs.CANES.all;
} while(ECanbShadow.CANES.bit.CCE != 0 ); // Wait for CCE bit to be cleared..
????ЖдгЪЯфЕФЯргІХфжУНјааЩшжУЁЃ
ECanbRegs.CANME.all = 0;//ЦСБЮЫљгагЪЯф,дкаДMSGIDжЎЧАБиаывЊзі
EDIS;
ECanbMboxes.MBOX0.MSGID.bit.IDE = 0;//БъзМжЁИёЪН
...
ECanbMboxes.MBOX31.MSGID.bit.IDE = 0;
ECanbMboxes.MBOX0.MSGCTRL.bit.DLC = 8;//Ъ§ОнГЄЖШ8ИізжНк
...
ECanbMboxes.MBOX31.MSGCTRL.bit.DLC = 8;//Ъ§ОнГЄЖШ8ИізжНк
ECanbMboxes.MBOX0.MSGCTRL.bit.TPL = 0;//ЩшжУгХЯШМЖ
...
ECanbMboxes.MBOX31.MSGCTRL.bit.TPL = 31;//ЩшжУгХЯШМЖ
ECanbMboxes.MBOX0.MSGCTRL.bit.RTR = 0;//УЛгадЖГЬжЁЧыЧѓ
...
ECanbMboxes.MBOX31.MSGCTRL.bit.RTR = 0;//УЛгадЖГЬжЁЧыЧѓ
EALLOW;
EALLOW;
ECanbRegs.CANMIM.all = 0xFFFFFFFE;
//гЪЯфжаЖЯНЋВњЩњдкECAN0INT
ECanbRegs.CANMIL.all = 0;
ECanbRegs.CANGIF0.all = 0xFFFFFFFF;
ECanbRegs.CANGIF1.all = 0xFFFFFFFF;
//ECAN0INTжаЖЯЧыЧѓЯпБЛЪЙФм
ECanbRegs.CANGIM.bit.I0EN = 1;
EDIS;
змНс:
- ХфжУНгЪеКЭЗЂЫЭв§НХ;
- ХфжУeCANФЃПщдкeCANФЃЪН;
- гЪЯфПижЦМФДцЦїШЋВПжУЮЛ,гЪЯфНгЪеКЭЗЂЫЭЯрЙиБъжОЮЛжУЮЛ,ЧыЧѓЩшжУВЈЬиТЪЕШЪ§Он;
- ЩшжУВЈЬиТЪЕШЪ§Он;
- ЖдгЪЯфНјааХфжУ,ШчИёЪНЁЂЪ§ОнГЄЖШЁЂгХЯШМЖЕШ;
- ЩшжУeCANФЃПщЕФжаЖЯЁЃ
3. жїГЬађ
????ЯШвЊЖджаЖЯЯђСПНјааХфжУ,етРявЊВщПДжаЖЯЯђСПБэ,ВщПДECAN0INTBжаЖЯЪЧдкФФвЛЬѕжаЖЯЯпЩЯ,гжЪЧетЬѕжаЖЯЯпЩЯЕФЕкМИИіжаЖЯЯђСПЁЃ
EALLOW;
PieVectTable.TINT0 = &ISRTimer0;//МЦЪБЦїжаЖЯЯђСП
PieVectTable.ECAN0INTB = &ISRCanb;//eCANФЃПщжаЖЯЯђСП
EDIS;
PieCtrlRegs.PIECTRL.bit.ENPIE = 1;//ЫљгаЯђСПШЁздPIEЯђСПБэ
PieCtrlRegs.PIEIER1.bit.INTx5 = 1;//XINT2
PieCtrlRegs.PIEIER1.bit.INTx7 = 1;//TINT0
PieCtrlRegs.PIEIER9.bit.INTx7 = 1;//ECAN0INTB
IER |= M_INT9;//жаЖЯ9ЪЙФм
IER |= M_INT1;//жаЖЯ1ЪЙФм
IER |= M_INT14;//жаЖЯ14ЪЙФм
EINT;//ЪЙФмШЋОжжаЖЯ
ERTM;//ЪЙФмЪЕЪБжаЖЯ
????НгЯТРДвЊЩшжУНгЪегЪЯфКЭЗЂЫЭгЪЯфЁЃ
MSGb_Init(0,0,0x0601); //cana mail 0 send ЕчЛњ1
MSGb_Init(1,1,0x0581); //cana mail 1 resive
MSGb_Init(2,0,0x0602); //cana mail 2 send ЕчЛњ2
MSGb_Init(3,1,0x0582); //cana mail 3 resive ЕчЛњ2
MSGb_Init(4,0,0x0080); //cana mail 4 send ЗЂЫЭЭЌВНжЁ
MSGb_Init(5,0,0x0203); //cana mail 5 send ЗЂЫЭЪ§зжСПгЪЯф
MSGb_Init(6,0,0x0303); //cana mail 6 send ЗЂЫЭФЃФтСПгЪЯф
MSGb_Init(7,0,0x0403); //cana mail 7 send ЗЂЫЭФЃФтСПгЪЯф
MSGb_Init(8,1,0x0183); //cana mail 8 resive
MSGb_Init(9,1,0x0283); //cana mail 9 resive
MSGb_Init(10,1,0x0383); //cana mail 10 resive
MSGb_Init(11,1,0x0483); //cana mail 11 resive
MSGb_Init(12,0,0x0000); //ЦєЖЏЫљгаНкЕу
MSGb_Init(13,0,0x0603); //ХфжУжмЦкЗЂЫЭ
????ЮвУЧашвЊПДвЛЯТMSGb_InitКЏЪ§ЪЧдѕУДХфжУгЪЯфЕФЁЃ
void MSGb_Init(Uint16 msgnum,Uint16 dir,Uint32 id)
{
struct ECAN_REGS ECanbShadow;
switch (msgnum)
{
case 0:
ECanbShadow.CANMD.all = ECanbRegs.CANMD.all;
ECanbShadow.CANMD.bit.MD0 = dir; //гЪЯф0ЩшжУЮЊЗЂЫЭ
ECanbRegs.CANMD.all = ECanbShadow.CANMD.all;
if(dir==1)
{
ECanbMboxes.MBOX0.MSGID.bit.AME=1;//НгЪеЦСБЮ
}
ECanbMboxes.MBOX0.MSGID.all = (id << 18);
ECanbShadow.CANME.all = ECanbRegs.CANME.all;
ECanbShadow.CANME.bit.ME0 = 1;//ЪЙФм
ECanbRegs.CANME.all = ECanbShadow.CANME.all;
break;
......

????ЕБЮвУЧЖЈвхЕФНгЪегЪЯфЪеЕНаХЯЂКѓ,ОЭЛсДЅЗЂгЪЯфжаЖЯ,зЊЖјШЅжДаажаЖЯзгГЬађ,жаЖЯТЗЯпШчЯТЁЃ

????ИљОнжЎЧАЕФГѕЪМЛЏЙЄзї,ЮвУЧжЊЕРЕБгЪЯф1ЛђгЪЯф3ЪеЕНаХЯЂКѓ,ОЭЛсНЋЦфRMPЮЊжУ1,МДДЅЗЂжаЖЯгЪЯфНгЪежаЖЯ,ЭЌЪБШєCANMIMКЭCANMILМФДцЦїЖдгІЮЛЖМБЛЪЙФм,дђЛсЭЈЙ§CANGIMМФДцЦїНЋЫљгажаЖЯгГЩфЕНECAN0INTжаЖЯЯпЩЯЁЃ
4. жаЖЯЗўЮёзгГЬађ
interrupt void ISRCanb(void)
{
switch(ECanbRegs.CANRMP.all)//ШчЙћЪеЕНЯћЯЂ,CANRMPНЋгаЮЛБЛжУ1
{
......
case 0x00000002://1
ECanbRegs.CANRMP.all=0xffffffff;//ЧхГ§НгЪеЭъГЩБъжО
L[1] = ECanbMboxes.MBOX1.MDL.all;
H[1] = ECanbMboxes.MBOX1.MDH.all;
if(L[1] == 0x436C6000)
{
HisBuffer_v1[0] = 0x05;
HisBuffer_v1[1] = 0x81;
HisBuffer_v1[2] = (L[1] >> 24) & 0xff;
HisBuffer_v1[3] = (L[1] >> 16) & 0xff;
HisBuffer_v1[4] = (L[1] >> 8) & 0xff;
HisBuffer_v1[5] = L[1] & 0xff;
HisBuffer_v1[6] = H[1] & 0xff;
HisBuffer_v1[7] = (H[1] >> 8) & 0xff;
HisBuffer_v1[8] = (H[1] >> 16) & 0xff;
HisBuffer_v1[9] = (H[1] >> 24) & 0xff;
flag_send_v1 = 1;
}
break;
case 0x00000004: //2
ECanbRegs.CANRMP.all=0xffffffff;
L[2] = ECanbMboxes.MBOX2.MDL.all;
H[2]= ECanbMboxes.MBOX2.MDH.all;
break;
case 0x00000008: //3 ЕчЛњ2
ECanbRegs.CANRMP.all=0xffffffff;//ЧхГ§НгЪеЭъГЩБъжО
L[3] = ECanbMboxes.MBOX3.MDL.all;
H[3] = ECanbMboxes.MBOX3.MDH.all;
if(L[3] == 0x436C6000)
{
HisBuffer_v2[0] = 0x05;
HisBuffer_v2[1] = 0x82;
HisBuffer_v2[2] = (L[3] >> 24) & 0xff;
HisBuffer_v2[3] = (L[3] >> 16) & 0xff;
HisBuffer_v2[4] = (L[3] >> 8) & 0xff;
HisBuffer_v2[5] = L[3] & 0xff;
HisBuffer_v2[6] = H[3] & 0xff;
HisBuffer_v2[7] = (H[3] >> 8) & 0xff;
HisBuffer_v2[8] = (H[3] >> 16) & 0xff;
HisBuffer_v2[9] = (H[3] >> 24) & 0xff;
flag_send_v2 = 1;
}
break;
......
????гЩГЬађПЩвдЗЂЯж,ЕБШЮвтRMPЮЛБЛжУЮЛКѓ,ОЭЛсНјШыжаЖЯ,ЖјЮвУЧЪЙФмЕФНгЪегЪЯфЪЧгЪЯф1КЭгЪЯф3,ФЧУДЦфЖдгІRMPЮЛБЛжУЮЛ,ОЭЛсНјШыЖдгІЕФГЬађЖЮЁЃЮвУЧЫљвЊзіЕФЪЧНЋНгЪеЕНЕФЪ§ОнжиаТНјааДІРэ,аДШыЪ§зщHisBufferжа,ШЛКѓНЋвдЬЋЭјЗЂЫЭБъжОжУ1,дйЭЈЙ§вдЬЋЭјЗЂЫЭГіШЅЁЃвдЬЋЭјЭЈаХЪЧКѓајЮвУЧашвЊЬжТлЕФСЫЁЃ