1. ����
??CS5530��24 λ���г��������Ŵ�����ģ������ת����,���ѹ������������ʵ�ָ߾��ȵij���(���ӳ�)����,�����Ľ��ӳ��ش�����ʵ��ԭ������δβ���CS5530ʵ�ֵ��ӳӳ��ط���������ϸ������
2. ���ӳ�ʵ��ԭ��
??ʵ�ֵ��ӳӵĴ������кܶ�,�˴����õ���ʽӦ��Ƭ������ʵ���źŵIJɼ�

ԭ������ͼ��ʾ:
??��Ӧ��Ƭճ���������������͵���Ԫ����, ������Ԫ��������������ʱ,Ӧ��Ƭ������Ӧ��Ӧ��, ת���ɵ���仯,��Ӧ��Ƭ�ӳ���
??��ͼ��ʾ�ĵ���,������ĵ���仯��ת��Ϊ������·�ĵ�ѹ�仯,ͨ�����������ѹ����ֵ, ��ͨ�����㼴�ɵõ����������������
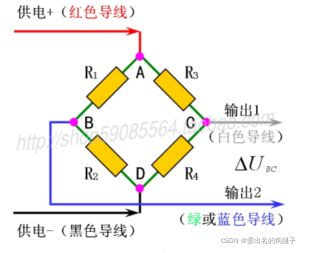
Uad��Ϊ������������Դ,Ubc��Ϊ�������
������ʱ,�������ӦΪ0v,����ƽ��,��ʱ
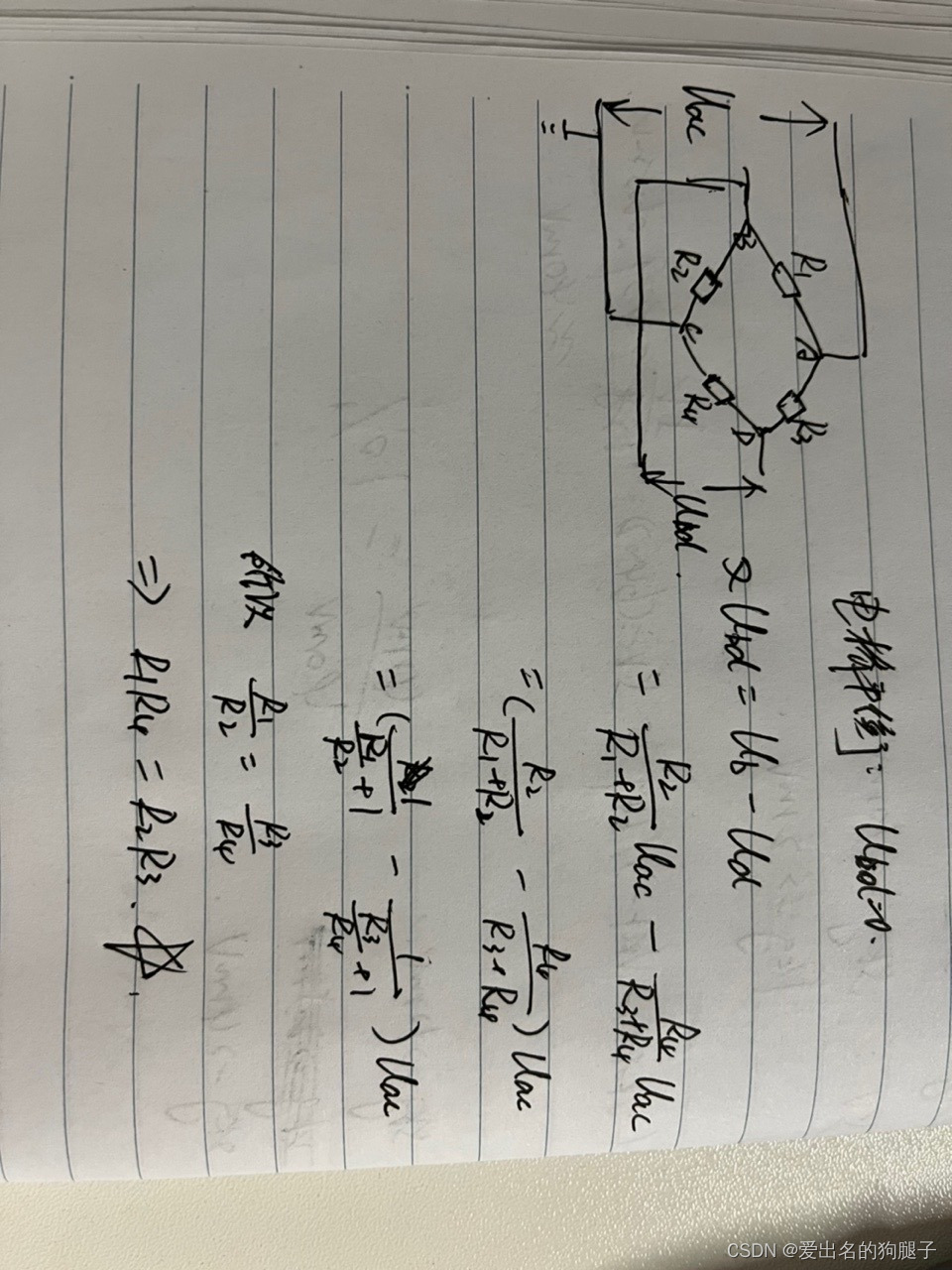
??���:�Խǵ�����ֵ�˻����,����ƽ����ŵĻ�������
??���ݴ������IJ�ͬ,�������е�ֻ��һ�����跢���ı�,�е�������,�е����ĸ�;����,���ĸ��ľ������;
??���ŵ��ĸ����Ͻӹ���Ӧ��Ƭ,�������е����,ͬ��һ���¶ȳ�,�¶�Ӱ�������,��ѹ��������ȸ�
??���ݵ����ѹ,���Լ�������¹�ϵ:

??�����������Ubc֮��������Χ�봫�����й�,��ѡ�õĴ������������б�ע������Ϣ:
| ���� | ���� |
|---|---|
| �ͺ� | AT8502 |
| ���� | 5kg |
| ������ | 2.0mV/V |
??ע��������ز��ܳ�������,��Ҫ���ء�����������������ָܻ�ԭ��״,�������Ա���,����������
??���������ȵĺ�������:��������һ���Ĺ���������Uin(����5VDC),�غɴﵽ�������(����10kg)ʱ������仯��Uout(����10mV)�빩���ѹ�ı�ֵ:S=Uout/Uin=10mV/5V=2mV/V
??�������ѡ������������,������5Kg�������,������ŵ�ԴΪ1V,�����Ϊ1mV;������ŵ�ԴΪ5V,�����Ϊ10mV;�������ѹ�㶨Ϊ5V,�ı为��,����Ϊ1Kgʱ,�����ѹΪ2mV,������ѹΪ5Vʱ�˴���������Ϊ2mV/Kg
??��������ӵ�adת��оƬ������,ͨ�������ŵ�������ɼ������Ӧ�ĵ�ѹ��,����Ϊʲô��Ҫ��adת��оƬ��,ͨ�����ϼ������ǿ���֪�����ŵ������ʵ��С,Ϊ�˱�֤����,�����Ҫѡ��߾��ȵIJɼ�оƬ,���ѡ����adоƬ
2. CS5530ʹ������
??cs5530��һ��24 λ���г��������Ŵ�����ģ������ת����( ADC),�����������ŵ�����ת��,�����ֲ����ص�ַ:https://download.csdn.net/download/qq_43332314/85099254
??�����IJ���gd32��Ӳ��spi�������cs5530�����ݶ�ȡ,ע��cs5530оƬ֧�ֵ�SPIƵ��С��2MHz!
??��������:
- ͬ��������оƬ��������ģʽ
??�ڷ������üĴ���֮ǰ,�û�һ��Ҫȷ��ʹ�ô��ڳ�ʼ�����в���ʹ�ô���ͬ����
??ͨ����������15��SYNC1����(ʮ�����Ƶ�oxFF)�ٷ�һ��SYNC0����(ʮ�����Ƶ�oxFE) - ϵͳ��ʼ��
??CS5530û���ṩ�ϵ縴λ����,���Ҫ���г�ʼ��,�û�һ��Ҫͨ�����üĴ�����������λ��
??�����üĴ�����RSλ��1,�ȴ�8��ʱ������֮��,��RSд0�����λʹ��,֮���RVλ�ж��Ƿ�λ���,ע��д���üĴ���֮ǰ��Ҫ�ȷ�һ���Լ���д���üĴ�������

- ����������
??������ݸ�����Ҫ���ð�,������,У��ʱδ����,��������Ϊ1��,Ҳ���Dz���Ĭ��ֵ - ���ݵ�·�������VRS(�ο���ѹѡ��)��U/B(������/˫����)
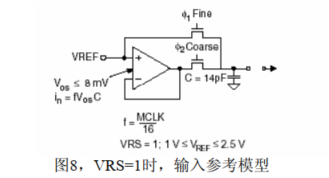
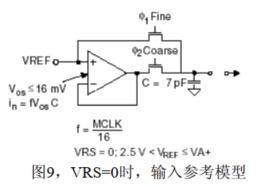
??�����ĵ�·����VREF=VA+����VRS = 0(Ĭ��ֵ),��Դ�ǵ�����,����U/B��0(Ҳ��Ĭ��ֵ)
5. ���������ض�����
�����Ļ�����û����,������ð��ֲ���������,���ֲ�úÿ���,�����Լ��ĵ�·������
6. ����ת������ִ��ת��
??���͵���ת������,ת�����֮��,MOSI���Ż�����,��û�м�������,ֱ����ʱһ��ʱ��,500ms,�ȴ�ת�����֮��ȥ��,����ʱ��ע����Ҫ�ȷ���һ���ֽ�0x00,ȡ��SDO flag,֮���ĸ��ֽڲ�������,���ݵĽ�����Ҫ������ݼĴ���˵��,���һ���ֽ��������־,ʵ��ֻ�������ֽ�,Ҳ����24λ����
7. ��ֵ����
??�����ֲ��2.1.1�½�!ת���������������������������ź���VREF+��VREF-֮��IJο���ѹ�ɺ�����ϵ��ת���������̷�ΧΪ:((VREF+) �C (VREF-))/(64Y),�����64Ϊ�Ŵ���������,��VRS=0ʱY=2,��VRS=1ʱY=1,VRS�Dzο���ѹ��ѡ���־λ,��һ��Ҫ����ת����VREF+��VREF-֮��IJ�ͬ�ο���ѹ�������á�
??����VRS=0,Vref+ = 5V,Vref- = 0V,���ת���������̷�Χ��(5-0)/(64*2) = 39.0625mV Լ���� 40mV;����������Ϊ40mV
??���ҷ���һ��2Kg�������ڴ�������ʱ,���ݵ�һ�½ڵĴ��������ݺ�ԭ������ɵõ�����H�ŵ����Ӧ��Ϊ:
??2Kg x 2mV/Kg = 4mV
??4mV / 40mV = 10%
??����һ��ת����ȡ����ת�����ݼĴ�����ֵΪ0x1a161300,����ֽ�Ϊ0x00,��Ϊû�з������,�������ֽڳ���������24λ����Ϊ
??0x1a1613 / 1 / 0xffffff = 10%("1"ָ���汶��)
??оƬ��������������һ��,������ν�0x1a161300ת��Ϊ��ѹֵ,���Ų�����˵�˰�!
3. ������������:
����gd32��CS5530��������
- spi����:
#include "./spi/bsp_spi.h"
#include <stdio.h>
static void spi_gpio_config(void)
{
rcu_periph_clock_enable(RCU_GPIOB);
/* SPI1_SCK(PB13), SPI1_MISO(PB14) and SPI1_MOSI(PB15) GPIO pin configuration */
gpio_init(GPIOB, GPIO_MODE_AF_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_13 | GPIO_PIN_14 | GPIO_PIN_15);
/* SPI1_CS(PB12) GPIO pin configuration */
gpio_init(GPIOB, GPIO_MODE_OUT_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_12);
SPI1_CS_HIGH();
}
static void spi_config(void)
{
spi_parameter_struct spi_init_struct;
rcu_periph_clock_enable(RCU_SPI1);
/* SPI1 parameter config */
spi_init_struct.trans_mode = SPI_TRANSMODE_FULLDUPLEX;
spi_init_struct.device_mode = SPI_MASTER;
spi_init_struct.frame_size = SPI_FRAMESIZE_8BIT;
spi_init_struct.clock_polarity_phase = SPI_CK_PL_LOW_PH_1EDGE;
spi_init_struct.nss = SPI_NSS_SOFT;
spi_init_struct.prescale = SPI_PSC_128;
spi_init_struct.endian = SPI_ENDIAN_MSB;
spi_init(SPI1, &spi_init_struct);
spi_enable(SPI1);
}
void bsp_spi_init(void)
{
spi_gpio_config();
spi_config();
}
uint8_t spi1_flash_read_byte(void)
{
return(spi1_flash_send_byte(0x00));
}
uint8_t spi1_flash_send_byte(uint8_t data)
{
/* loop while data register in not emplty */
while (RESET == spi_i2s_flag_get(SPI1, SPI_FLAG_TBE));
/* send byte through the SPI0 peripheral */
spi_i2s_data_transmit(SPI1, data);
/* wait to receive a byte */
while(RESET == spi_i2s_flag_get(SPI1, SPI_FLAG_RBNE));
/* return the byte read from the SPI bus */
return(spi_i2s_data_receive(SPI1));
}
int8_t spi1_flash_send_buf(uint8_t *txdata, uint8_t *rxdata, uint32_t len)
{
if (txdata == NULL || rxdata == NULL)
return -1;
for (int i = 0; i < len; i ++) {
/* loop while data register in not emplty */
while (RESET == spi_i2s_flag_get(SPI1, SPI_FLAG_TBE));
/* send byte through the SPI0 peripheral */
spi_i2s_data_transmit(SPI1, txdata[i]);
/* wait to receive a byte */
while(RESET == spi_i2s_flag_get(SPI1, SPI_FLAG_RBNE));
/* return the byte read from the SPI bus */
rxdata[i] = spi_i2s_data_receive(SPI1);
}
return 0;
}
int8_t spi1_flash_read_buf(uint8_t *data, uint32_t len)
{
if (data == NULL)
return -1;
for (int i = 0; i < len; i ++) {
data[i] = spi1_flash_read_byte();
}
return 0;
}
spiͷ�ļ�
#ifndef __BSP_SPI_H__
#define __BSP_SPI_H__
#include <gd32f30x.h>
#define SPI1_CS_HIGH() {gpio_bit_write(GPIOB, GPIO_PIN_12, SET);}
#define SPI1_CS_LOW() {gpio_bit_write(GPIOB, GPIO_PIN_12, RESET);}
void bsp_spi_init(void);
uint8_t spi1_flash_read_byte(void);
uint8_t spi1_flash_send_byte(uint8_t data);
int8_t spi1_flash_send_buf(uint8_t *txdata, uint8_t *rxdata, uint32_t len);
int8_t spi1_flash_read_buf(uint8_t *data, uint32_t len);
#endif /* __BSP_SPI_H__ */
- cs5530����:
#include "./cs5530/cs5530.h"
#include "./spi/bsp_spi.h"
#include <rtthread.h>
#include <string.h>
#define WO_OFFSET_REG_CMD (0x00|0x01)
#define RO_OFFSET_REG_CMD (0x08|0x01)
#define WO_GAIN_REG_CMD (0x00|0x02)
#define RO_GAIN_REG_CMD (0x08|0x02)
#define WO_CONFIG_REG_CMD (0x00|0x03)
#define RO_CONFIG_REG_CMD (0x08|0x03)
#define SINGLE_CONVER_CMD (0x80|0x00)
#define CONTINU_CONVER_CMD (0x80|0x40)
#define SYS_OFFSET_CALI_CMD (0x85)
#define SYS_GAIN_CALI_CMD (0x86)
#define SYNC1_CMD (0xff)
#define SYNC0_CMD (0xfe)
#define NULL_CMD (0x00)
/**
* @brief cs5330��ʼ��
* @return -1:ʧ�� 0:�ɹ�
*/
int8_t cs5530_init(void)
{
uint32_t txdata = 0;
uint8_t tx_buf[5] = {0};
uint8_t rx_buf[5] = {0};
/* ��λ���ڽ�������ģʽ */
SPI1_CS_LOW();
for (int i = 0; i < 16; i++) {
spi1_flash_send_byte(SYNC1_CMD);
}
spi1_flash_send_byte(SYNC0_CMD);
SPI1_CS_HIGH();
rt_thread_mdelay(5);
/* ϵͳ��λ */
memset(tx_buf, 0, sizeof(tx_buf));
txdata = 1 << 29;
tx_buf[0] = WO_CONFIG_REG_CMD;
tx_buf[1] = txdata >> 24; tx_buf[2] = txdata >> 16;
tx_buf[3] = txdata >> 8; tx_buf[4] = txdata;
SPI1_CS_LOW();
spi1_flash_send_buf(tx_buf, rx_buf, 5);
SPI1_CS_HIGH();
rt_thread_mdelay(5);
/* ���ϵͳ��λ��־ */
memset(tx_buf, 0, sizeof(tx_buf));
txdata = 0;
tx_buf[0] = WO_CONFIG_REG_CMD;
tx_buf[1] = txdata >> 24; tx_buf[2] = txdata >> 16;
tx_buf[3] = txdata >> 8; tx_buf[4] = txdata;
SPI1_CS_LOW();
spi1_flash_send_buf(tx_buf, rx_buf, 5);
SPI1_CS_HIGH();
rt_thread_mdelay(5);
/* ��ȡϵͳ��λ��ɱ�־ */
memset(tx_buf, 0, sizeof(tx_buf));
txdata = 0;
tx_buf[0] = RO_CONFIG_REG_CMD;
SPI1_CS_LOW();
spi1_flash_send_buf(tx_buf, rx_buf, 5);
SPI1_CS_HIGH();
rt_kprintf("1_config:%02x%02x%02x%02x\n", rx_buf[0],
rx_buf[1],
rx_buf[2],
rx_buf[3],
rx_buf[4]);
rt_thread_mdelay(5);
if (rx_buf[1] != 0x10)
return -1;
/* ����Ϊ������ģʽ */
memset(tx_buf, 0, sizeof(tx_buf));
txdata = 1 << 10;
tx_buf[0] = WO_CONFIG_REG_CMD;
tx_buf[1] = txdata >> 24; tx_buf[2] = txdata >> 16;
tx_buf[3] = txdata >> 8; tx_buf[4] = txdata;
SPI1_CS_LOW();
spi1_flash_send_buf(tx_buf, rx_buf, 5);
SPI1_CS_HIGH();
rt_thread_mdelay(5);
/* ��ȡ���üĴ���ֵ */
memset(tx_buf, 0, sizeof(tx_buf));
txdata = 0;
tx_buf[0] = RO_CONFIG_REG_CMD;
SPI1_CS_LOW();
spi1_flash_send_buf(tx_buf, rx_buf, 5);
SPI1_CS_HIGH();
rt_kprintf("2_config:%02x%02x%02x%02x\n", rx_buf[0],
rx_buf[1],
rx_buf[2],
rx_buf[3],
rx_buf[4]);
rt_thread_mdelay(5);
if (rx_buf[3] != 0x04)
return -1;
return 0;
}
/**
* @brief cs5330ִ�е���ת��
*/
void cs5330_perform_single_conversion(void)
{
SPI1_CS_LOW();
spi1_flash_send_byte(SINGLE_CONVER_CMD);
SPI1_CS_HIGH();
}
/**
* @brief ��ȡcs5330ת�����
* @return 1:��� 0:ʧ��
*/
uint8_t get_cs5330_conver_state(void)
{
if (gpio_input_bit_get(GPIOB, GPIO_PIN_14) == 0)
return 1;
else
return 0;
}
/**
* @brief cs5330��ȡת�����
*/
uint32_t cs5330_read_conver_reslut(void)
{
uint32_t ret = 0;
uint8_t tx_buf[5] = {0};
uint8_t rx_buf[5] = {0};
memset(tx_buf, 0, sizeof(tx_buf));
tx_buf[0] = NULL_CMD;
SPI1_CS_LOW();
spi1_flash_send_buf(tx_buf, rx_buf, 5);
SPI1_CS_HIGH();
rt_thread_mdelay(5);
rt_kprintf("%02x%02x%02x%02x\n",rx_buf[1],rx_buf[2],rx_buf[3],rx_buf[4]);
ret = (uint32_t)((rx_buf[1] << 16) | (rx_buf[2] << 8) | rx_buf[3]);
if ((rx_buf[4] & 0x04) == 0) {
rt_kprintf("%d\n", ret * 100 / 0xffffff);
}
return ret;
}
cs5530ͷ�ļ�
#ifndef __CS5530_H__
#define __CS5530_H__
#include <stdint.h>
int8_t cs5530_init(void);
void cs5330_perform_single_conversion(void);
uint32_t cs5330_read_conver_reslut(void);
uint8_t get_cs5330_conver_state(void);
#endif /* __CS5530_H__ */
- ������
void main()
{
/* �ȴ�ģ���ȶ� */
rt_thread_mdelay(500);
while (cs5530_init() != 0) {
rt_thread_mdelay(500);
rt_kprintf("cs5330 init fail!");
}
while (1) {
cs5330_perform_single_conversion();
rt_thread_mdelay(500);
while( cs5330_read_conver_reslut() == 0)
rt_thread_mdelay(500);
}
}
ע��:���ϳ������rtthread��д,��˳������в��ֺ�����Ҫ���ݸ��Ե�ƽ̨�л�,��rt_thread_mdelay ��rt_kprintf
??֧�ֿ�Դ����,�ǵõ���֧����Ŷ ^ _ ^

