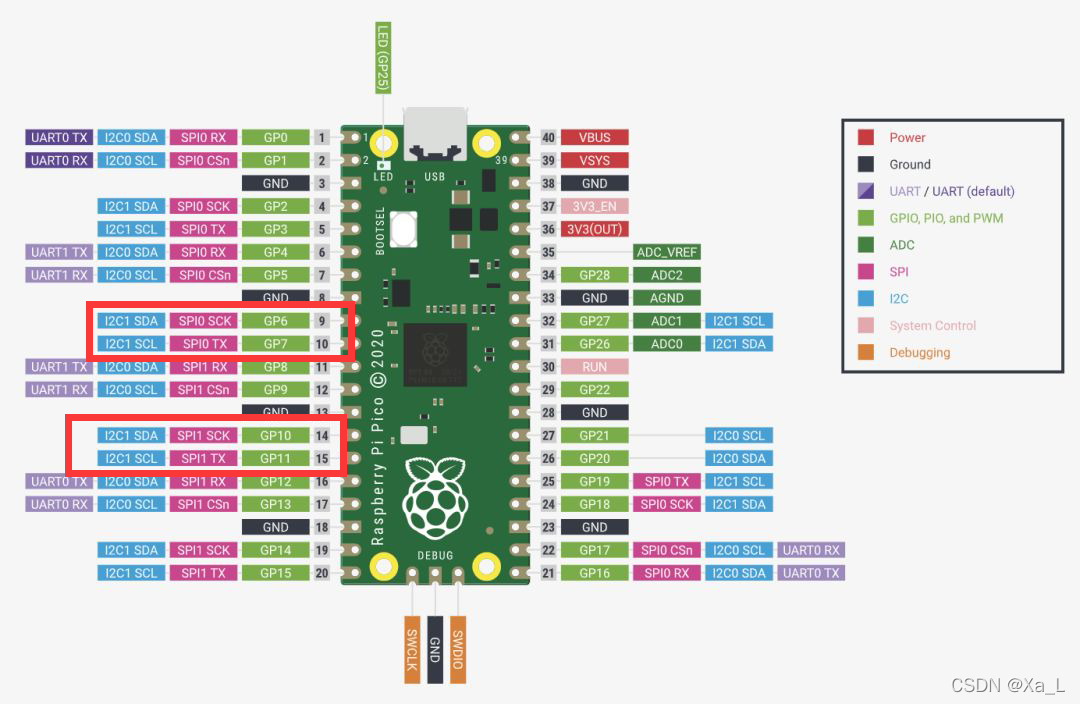
首先,我们先看下面关于Raspberry Pi Pico的一张引脚图
1、关于I2C和SoftI2C的区别和联系
能够清晰地看到上面框图所圈起来的就是我们常常所说的I2C引脚接口,这里的接口指的就是硬件I2C接口,也就是我们常常在软件中仅用I2C表示即可。
特点:
- I2C(硬件I2C)是由相应的I2C驱动电路,其使用的I2C管脚也是专用的。
- SoftI2C(软件I2C)一般是由电路中常见的GPIO管脚所组成,使用软件来控制管脚状态用以模仿I2C(硬件I2C)进行通信
- I2C(硬件I2C)效率远高于SoftI2C。SOftI2C其接口比较灵活,不受管脚限制。
2、关于SPI和SoftSPI的区别和联系
SPI和SoftSPI与I2C和SoftI2C的基本上都一样,SPI指硬件自带的外设功能,SoftSPI指使用硬件上的I/O口模拟SPI接口,以实现SPI功能。
特点:
- 相比于SPI来说,SoftSPI占用的MCU资源较多,速度相比于SPI来说比较慢
- SPI 发送数据和传送数据,不需要MCU进行处理,是由硬件进行处理。
- 使用SoftSPI可以在不同的处理器或者不同架构间进行代码的移植,代码通用性强。
Micropython编程的区别:
1、I2C和SoftI2C
# @Time : 2022.4.9
# @Author : Xa_L
# @FileName: i2c_and_Softi2c.py
from machine import I2C,Pin
import machine
import utime
#初始化I2C通道1 ,使用GPIO6和GPIO7 分别作为SDA 和SCL 引脚,频率为10KHZ
led = Pin(25,Pin.OUT)
i2c = I2C(id = 1 ,scl = Pin(7) ,sda = Pin(6), freq = 10000)
#扫描I2C总线下所有设备地址,并返回对应的列表
add_list = i2c.scan()
while True:
if len(add_list) >= 1:
led.toggle()
utime.sleep(3)
print("Device connected")
elif len(add_list) == 0:
print("Nothine connected")
led.value(1)
utime.sleep(3)# @Time : 2022.4.9
# @Author : Xa_L
# @FileName: i2c_and_Softi2c.py
from machine import SoftI2C,Pin
import machine
import utime
#初始化I2C通道1 ,使用GPIO6和GPIO7 分别作为SDA 和SCL 引脚,频率为10KHZ
led = Pin(25,Pin.OUT)
i2c = SoftI2C(scl = Pin(7) ,sda = Pin(6), freq = 10000)
#扫描I2C总线下所有设备地址,并返回对应的列表
add_list = i2c.scan()
while True:
if len(add_list) >= 1:
led.toggle()
utime.sleep(3)
print("Device connected")
elif len(add_list) == 0:
print("Nothine connected")
led.value(1)
utime.sleep(3)?对于I2C来说,假设我们里面没有标识特定的id 或者 id 标识错误,那么程序就会报错
- 没有标识ID
- ID 标识错误
?2、SPI和SoftSPI
对于SPI和SoftSPI来说,其用法基本上和I2C/SoftIC类似,语句也基本上是一样的,下面简单演示一下代码的方案:
machien.SPI(id,baudrate= 500000, polarity = 0, phase = 0, bits = 8, firstbit = 0, sck = None, mosi = None, miso = None)
1、machien.SoftSPI(baudrate= 500000, polarity = 0, phase = 0, bits = 8, firstbit = 0, sck = None, mosi = None, miso = None)
?
?

