预备
学习目标
概述
我对原子的代码进行了一些修改,屏蔽了一些不必要的细节,以下函数会每隔500ms产生一个中断,可以自行在中断函数中定义中断行为
-
时钟输入
输入 说明 内部时钟的倍频 我们在代码中没有进行配置时候的默认选择 外部时钟 (针对2,3,4) 内部触发输入口 来自其他定时器 定时器外部通道 无 -
定时器的功能列表
功能 说明 普通定时 一般使用通用定时器 输入捕获 引脚查询手册 输出比较 可以进行PWM输出 -
RCT6定时器资源:
定时器种类 通用定时器 高级定时器 基本定时器 定时器号 2,3,4,5 1,8 6,7 定时器功能 定时记数,PWM,输入捕获,输出比较 带死区和控制紧急刹车 主要使用于驱动DAC 记数模式 都可 都可 都可 产生DMA请求 可以 可以 可以 位数 16 16 16 -
计数器模式
模式 说明 向上记数(以此为例) 从 0到ARR向下记数 从 ARR到0对齐记数 从 0到ARR-1到1 -
事件
事件 说明 更新事件 每次计时器溢出可以产生更新事件,也可以TIMx_EGR的UG软件设置来产生一个更新事件 -
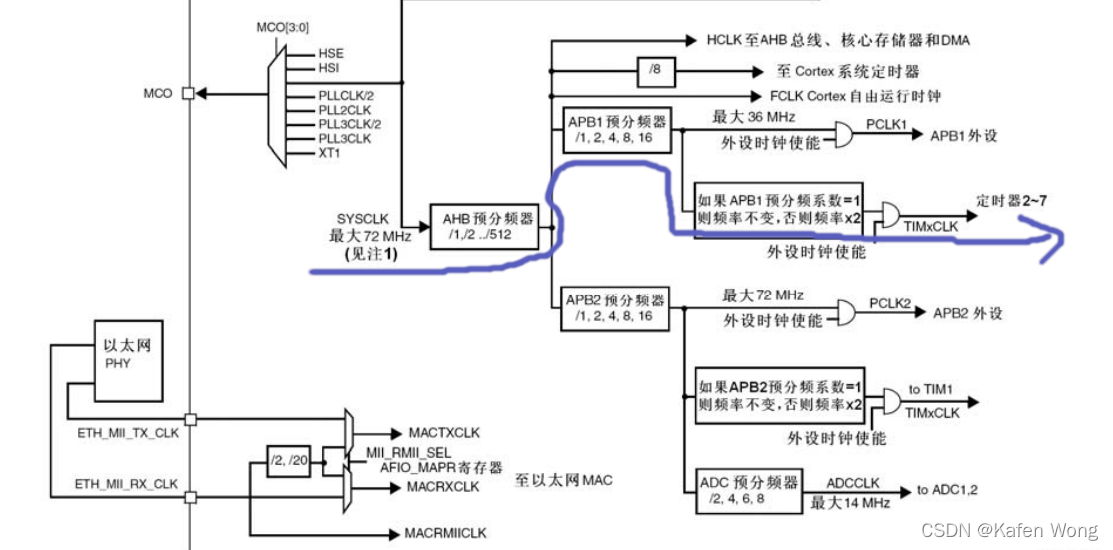
时钟计算(以内部时钟为例)
在这里我截取了部分的时钟树框图和定时器框图,可以看到定时器时钟是系统时钟经过AHB预分频,APB1预分频得到的,默认情况下时钟 说明 系统时钟SYSCLK 72M AHB时钟 72M APB1时钟 36M APB1预分频系数 2 CK_INT 2*36M=72M CK_PSC =CK_INT=72M CK_CNT C K _ I N T P S C + 1 = 72 M 7200 = 10 K \frac{CK\_INT}{PSC+1}=\frac{72M}{7200}=10K PSC+1CK_INT?=720072M?=10K 定时器溢出时间 T o u t T_{out} Tout? 1 C K _ C N T ? ( A R R + 1 ) = 0.5 ( 秒 ) \frac{1}{CK\_CNT}*(ARR+1)=0.5(秒) CK_CNT1??(ARR+1)=0.5(秒)

核心代码讲解
- 自动装载值ARR,我们这里写4999
- 预分频系数PSC,这里我们写死,为7199,该值最好不要进行修改
- 定时器时钟分割:暂时先写0
\frac{}{} ?
TIM_TimeBaseStructure.TIM_Period = arr; //自动装载值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //预分频系数
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //时钟分割
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;//向上记数
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //结构体赋值
timer.c
#include "timer.h"
#include "led.h"
void TIM3_Int_Init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //?��?��
TIM_TimeBaseStructure.TIM_Period = arr; //��������?�������?�?��?���?���?�??������?�? ������5000?500ms
TIM_TimeBaseStructure.TIM_Prescaler =psc; //����������?TIMx?��?�?�����?��?? 10Khz�?���?��
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //����?�??�:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM���?���??
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //����TIM_TimeBaseInitStruct��?���?�����?��TIMx��?�������λ
TIM_ITConfig( //?�?���?��?����TIM�ж�
TIM3, //TIM2
TIM_IT_Update ,
ENABLE //?��
);
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3�ж�
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //��?���?�0��
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //�����?�3��
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ?����?��
NVIC_Init(&NVIC_InitStructure); //����NVIC_InitStruct��?���?�����?������NVIC�?���
TIM_Cmd(TIM3, ENABLE); //?��TIMx����
}
void TIM3_IRQHandler(void) //TIM3�ж�
{
if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET)
{
TIM_ClearITPendingBit(TIM3, TIM_IT_Update );
LED1=!LED1;
}
}
timer.h
#ifndef __TIMER_H
#define __TIMER_H
#include "sys.h"
void TIM3_Int_Init(u16 arr,u16 psc);
#endif
主函数调用
int main(void)
{
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);// 设置中断优先级分组2
LED_Init(); //初始化与LED连接的硬件接口
TIM3_Int_Init(4999,7199);//10Khz的计数频率,计数到5000为500ms
while(1)
{
LED0=!LED0;
delay_ms(200);
}
}
作业
- 使用定时器2,4,5产生中断

