UCOREʵ��1
ʵ��Ŀ��
����ϵͳ��һ������,Ҳ��Ҫͨ��ij�ֻ��Ƽ��ز������������������ǽ�ͨ������һ�����Ӽ�����-bootloader�������Щ������Ϊ��,������Ҫ���һ���ܹ��л���x86�ı���ģʽ����ʾ�ַ���bootloader,Ϊ��������ϵͳucore������lab1�ṩ��һ���dz�С��bootloader��ucore OS,����bootloaderִ�д���С��512���ֽ�,�������ܷŵ�Ӳ�̵������������С�ͨ��������ʵ�����bootloader��ucore OS,���߿����˽:
�����ԭ��
CPU�ı�ַ��Ѱַ: ���ڷֶλ��Ƶ��ڴ����
CPU���жϻ���
����:����/����/CGA,ʱ��,Ӳ��
Bootloader����
��������bootloader����
����bootloader�ķ���
PC����bootloader����
ELFִ���ļ��ĸ�ʽ�ͼ���
�������:��Ӳ��,��CGA����ʾ�ַ���
ucore OS����
��������ucore OS����
ucore OS����������
����ucore OS�ķ���
�������ù�ϵ:�ڻ�༶�˽⺯������ջ�Ľṹ�ʹ�������
�жϹ���:��������ص��жϴ���
�������:ʱ��
ʵ������
lab1�а���һ��bootloader��һ��OS�����bootloader�����л���X86����ģʽ,�ܹ������̲�����ELFִ���ļ���ʽ,����ʾ�ַ�������lab1�е�OSֻ��һ�����Դ���ʱ���жϺ���ʾ�ַ���������OS��
��ϰ1
��ϰ2
��ϰ3
��ϰ4
��ϰ5
��ϰ6
��ϰ1:����ͨ��make����ִ���ļ��Ĺ��̡�
ͨ����̬�����������˽�:
1.����ϵͳ�����ļ�ucore.img�����һ��һ�����ɵ�?(��Ҫ�Ƚ���ϸ�ؽ���Makefile��ÿһ������������������ĺ���,�Լ�˵������µĽ��)
2.һ����ϵͳ��Ϊ�Ƿ��Ϲ淶��Ӳ��������������������ʲô?
�������:
����Makefile
��ִ��makeʱ,һ��ֻ����ʾ���,������ʾmake����ִ������Щ���
�����˽�makeִ������Щ����,����ִ��:
$ make "V="
Ҫ��ȡ�����й�make����Ϣ,��������ѯ,����ִ��
$ man make
����
1.����ϵͳ�����ļ�ucore.img�����һ��һ�����ɵ�?
������lab1Ŀ¼�´��ն�����make V,�൱��������һ�����ʹ��make��ϸ�ı���ִ�й��̿���չʾ����:
yeyuhl@ubuntu:~/code/os_kernel_lab-master/ucore_os_lab/labcodes/lab1$ make V=
+ cc kern/init/init.c
gcc -Ikern/init/ -march=i686 -fno-builtin -fno-PIC -Wall -ggdb -m32 -gstabs -nostdinc -fno-stack-protector -Ilibs/ -Ikern/debug/ -Ikern/driver/ -Ikern/trap/ -Ikern/mm/ -c kern/init/init.c -o obj/kern/init/init.o
kern/init/init.c:95:1: warning: ��lab1_switch_test�� defined but not used [-Wunused-function]
95 | lab1_switch_test(void) {
| ^~~~~~~~~~~~~~~~
+ cc kern/libs/stdio.c
gcc -Ikern/libs/ -march=i686 -fno-builtin -fno-PIC -Wall -ggdb -m32 -gstabs -nostdinc -fno-stack-protector -Ilibs/ -Ikern/debug/ -Ikern/driver/ -Ikern/trap/ -Ikern/mm/ -c kern/libs/stdio.c -o obj/kern/libs/stdio.o
+ cc kern/libs/readline.c
gcc -Ikern/libs/ -march=i686 -fno-builtin -fno-PIC -Wall -ggdb -m32 -gstabs -nostdinc -fno-stack-protector -Ilibs/ -Ikern/debug/ -Ikern/driver/ -Ikern/trap/ -Ikern/mm/ -c kern/libs/readline.c -o obj/kern/libs/readline.o
+ cc kern/debug/panic.c
gcc -Ikern/debug/ -march=i686 -fno-builtin -fno-PIC -Wall -ggdb -m32 -gstabs -nostdinc -fno-stack-protector -Ilibs/ -Ikern/debug/ -Ikern/driver/ -Ikern/trap/ -Ikern/mm/ -c kern/debug/panic.c -o obj/kern/debug/panic.o
kern/debug/panic.c: In function ��__panic��:
kern/debug/panic.c:27:5: warning: implicit declaration of function ��print_stackframe��; did you mean ��print_trapframe��? [-Wimplicit-function-declaration]
27 | print_stackframe();
| ^~~~~~~~~~~~~~~~
| print_trapframe
+ cc kern/debug/kdebug.c
gcc -Ikern/debug/ -march=i686 -fno-builtin -fno-PIC -Wall -ggdb -m32 -gstabs -nostdinc -fno-stack-protector -Ilibs/ -Ikern/debug/ -Ikern/driver/ -Ikern/trap/ -Ikern/mm/ -c kern/debug/kdebug.c -o obj/kern/debug/kdebug.o
kern/debug/kdebug.c:251:1: warning: ��read_eip�� defined but not used [-Wunused-function]
251 | read_eip(void) {
| ^~~~~~~~
+ cc kern/debug/kmonitor.c
gcc -Ikern/debug/ -march=i686 -fno-builtin -fno-PIC -Wall -ggdb -m32 -gstabs -nostdinc -fno-stack-protector -Ilibs/ -Ikern/debug/ -Ikern/driver/ -Ikern/trap/ -Ikern/mm/ -c kern/debug/kmonitor.c -o obj/kern/debug/kmonitor.o
+ cc kern/driver/clock.c
gcc -Ikern/driver/ -march=i686 -fno-builtin -fno-PIC -Wall -ggdb -m32 -gstabs -nostdinc -fno-stack-protector -Ilibs/ -Ikern/debug/ -Ikern/driver/ -Ikern/trap/ -Ikern/mm/ -c kern/driver/clock.c -o obj/kern/driver/clock.o
+ cc kern/driver/console.c
gcc -Ikern/driver/ -march=i686 -fno-builtin -fno-PIC -Wall -ggdb -m32 -gstabs -nostdinc -fno-stack-protector -Ilibs/ -Ikern/debug/ -Ikern/driver/ -Ikern/trap/ -Ikern/mm/ -c kern/driver/console.c -o obj/kern/driver/console.o
+ cc kern/driver/picirq.c
gcc -Ikern/driver/ -march=i686 -fno-builtin -fno-PIC -Wall -ggdb -m32 -gstabs -nostdinc -fno-stack-protector -Ilibs/ -Ikern/debug/ -Ikern/driver/ -Ikern/trap/ -Ikern/mm/ -c kern/driver/picirq.c -o obj/kern/driver/picirq.o
+ cc kern/driver/intr.c
gcc -Ikern/driver/ -march=i686 -fno-builtin -fno-PIC -Wall -ggdb -m32 -gstabs -nostdinc -fno-stack-protector -Ilibs/ -Ikern/debug/ -Ikern/driver/ -Ikern/trap/ -Ikern/mm/ -c kern/driver/intr.c -o obj/kern/driver/intr.o
+ cc kern/trap/trap.c
gcc -Ikern/trap/ -march=i686 -fno-builtin -fno-PIC -Wall -ggdb -m32 -gstabs -nostdinc -fno-stack-protector -Ilibs/ -Ikern/debug/ -Ikern/driver/ -Ikern/trap/ -Ikern/mm/ -c kern/trap/trap.c -o obj/kern/trap/trap.o
kern/trap/trap.c: In function ��print_trapframe��:
kern/trap/trap.c:100:16: warning: taking address of packed member of ��struct trapframe�� may result in an unaligned pointer value [-Waddress-of-packed-member]
100 | print_regs(&tf->tf_regs);
| ^~~~~~~~~~~~
At top level:
kern/trap/trap.c:30:26: warning: ��idt_pd�� defined but not used [-Wunused-variable]
30 | static struct pseudodesc idt_pd = {
| ^~~~~~
kern/trap/trap.c:14:13: warning: ��print_ticks�� defined but not used [-Wunused-function]
14 | static void print_ticks() {
| ^~~~~~~~~~~
+ cc kern/trap/vectors.S
gcc -Ikern/trap/ -march=i686 -fno-builtin -fno-PIC -Wall -ggdb -m32 -gstabs -nostdinc -fno-stack-protector -Ilibs/ -Ikern/debug/ -Ikern/driver/ -Ikern/trap/ -Ikern/mm/ -c kern/trap/vectors.S -o obj/kern/trap/vectors.o
+ cc kern/trap/trapentry.S
gcc -Ikern/trap/ -march=i686 -fno-builtin -fno-PIC -Wall -ggdb -m32 -gstabs -nostdinc -fno-stack-protector -Ilibs/ -Ikern/debug/ -Ikern/driver/ -Ikern/trap/ -Ikern/mm/ -c kern/trap/trapentry.S -o obj/kern/trap/trapentry.o
+ cc kern/mm/pmm.c
gcc -Ikern/mm/ -march=i686 -fno-builtin -fno-PIC -Wall -ggdb -m32 -gstabs -nostdinc -fno-stack-protector -Ilibs/ -Ikern/debug/ -Ikern/driver/ -Ikern/trap/ -Ikern/mm/ -c kern/mm/pmm.c -o obj/kern/mm/pmm.o
+ cc libs/string.c
gcc -Ilibs/ -march=i686 -fno-builtin -fno-PIC -Wall -ggdb -m32 -gstabs -nostdinc -fno-stack-protector -Ilibs/ -c libs/string.c -o obj/libs/string.o
+ cc libs/printfmt.c
gcc -Ilibs/ -march=i686 -fno-builtin -fno-PIC -Wall -ggdb -m32 -gstabs -nostdinc -fno-stack-protector -Ilibs/ -c libs/printfmt.c -o obj/libs/printfmt.o
+ ld bin/kernel
ld -m elf_i386 -nostdlib -T tools/kernel.ld -o bin/kernel obj/kern/init/init.o obj/kern/libs/stdio.o obj/kern/libs/readline.o obj/kern/debug/panic.o obj/kern/debug/kdebug.o obj/kern/debug/kmonitor.o obj/kern/driver/clock.o obj/kern/driver/console.o obj/kern/driver/picirq.o obj/kern/driver/intr.o obj/kern/trap/trap.o obj/kern/trap/vectors.o obj/kern/trap/trapentry.o obj/kern/mm/pmm.o obj/libs/string.o obj/libs/printfmt.o
+ cc boot/bootasm.S
gcc -Iboot/ -march=i686 -fno-builtin -fno-PIC -Wall -ggdb -m32 -gstabs -nostdinc -fno-stack-protector -Ilibs/ -Os -nostdinc -c boot/bootasm.S -o obj/boot/bootasm.o
+ cc boot/bootmain.c
gcc -Iboot/ -march=i686 -fno-builtin -fno-PIC -Wall -ggdb -m32 -gstabs -nostdinc -fno-stack-protector -Ilibs/ -Os -nostdinc -c boot/bootmain.c -o obj/boot/bootmain.o
+ cc tools/sign.c
gcc -Itools/ -g -Wall -O2 -c tools/sign.c -o obj/sign/tools/sign.o
gcc -g -Wall -O2 obj/sign/tools/sign.o -o bin/sign
+ ld bin/bootblock
ld -m elf_i386 -nostdlib -N -e start -Ttext 0x7C00 obj/boot/bootasm.o obj/boot/bootmain.o -o obj/bootblock.o
'obj/bootblock.out' size: 496 bytes
build 512 bytes boot sector: 'bin/bootblock' success!
dd if=/dev/zero of=bin/ucore.img count=10000
10000+0 records in
10000+0 records out
5120000 bytes (5.1 MB, 4.9 MiB) copied, 0.0117931 s, 434 MB/s
dd if=bin/bootblock of=bin/ucore.img conv=notrunc
1+0 records in
1+0 records out
512 bytes copied, 0.000108956 s, 4.7 MB/s
dd if=bin/kernel of=bin/ucore.img seek=1 conv=notrunc
154+1 records in
154+1 records out
78916 bytes (79 kB, 77 KiB) copied, 0.000387761 s, 204 MB/s
�������ϱ������,���ǿ���ucore.img���ɷֳ����¼�������:
(1)����GCC������.c��.S�ļ�,�������Ŀ���ļ���
kern/initĿ¼:init.c(ϵͳ��ʼ������)
kern/libsĿ¼:stdio.c��readline.c(�����ⲿ��)
kern/debugĿ¼:panic.c��kdebug.c��kmonitor.c(�ں˵��Բ���)
kern/driverĿ¼:clock.c��console.c��picirq.c��intr.c(������������)
kern/trapĿ¼:trap.c��vectors.S��trapentry.S(�жϴ�������)
kern/mmĿ¼:pmm.c(�ڴ��������)
libsĿ¼:string.c��printfmt.c(�����ⲿ��)
������+ cc kern/init/init.c���µ�+ ld bin/kernel���ϵĹ��̡�
���ǽ�ȡһ���ļ��ı����������������������������ĺ���,�Լ�˵������µĽ��:
+ cc kern/libs/readline.c
gcc -Ikern/libs/ -march=i686 -fno-builtin -fno-PIC -Wall -ggdb -m32 -gstabs -nostdinc -fno-stack-protector -Ilibs/ -Ikern/debug/ -Ikern/driver/ -Ikern/trap/ -Ikern/mm/ -c kern/libs/readline.c -o obj/kern/libs/readline.o
�ؼ�����:
-march=i686:�������ɵ�Ŀ���ļ�ָ��ܹ�Ϊi686,��Intel 32λָ���
-fno-builtin:ֻʶ����_builtin_��Ϊǰ���ڽ�����,���ɶ�������Ż�,���ҷ�ֹ�ں˴��뺯�������ڽ���������ͻ�����Ż�������(�ڽ��������DZ������ڲ�ʹ�õĺ���)��
-fno-PIC:PIC(position independent code),ʹ�þ���λ��,���������λ�á�
-Wall:��ʾ���б��뾯�档
-ggdb:�����ܵ����� gdb �Ŀ���ʹ�õĵ�����Ϣ��
-m32:����32λĿ���ļ���
-gstabs:�� stabs ��ʽ���Ƶ�����Ϣ,���Dz����� gdb ������Ϣ��
-nostdinc:����OSʱ��Ӧ����C���Ա��⺯��,��Ҫ�Լ�ʵ��,��˶���C�ļ��������ͷ�ļ�Ӧ����ͷ�ļ�����Ŀ¼,��-Ikern/init/��-Ikern/driver/,��-I��ͷ+�ļ��б�ʾѰ��ͷ�ļ���·����
-fno-stack-protector:���ö�ջ��������
(2)ͨ��ld,��Ŀ���ļ�����,����kernel��ִ���ļ���
ʹ��ld���������������ɵĸ�Ŀ���ļ�,������tools/kernel.ld�ű��ļ���������,���Ӻ�����bin/kernel��OS�ں��ļ���
+ ld bin/kernel
ld -m elf_i386 -nostdlib -T tools/kernel.ld -o bin/kernel obj/kern/init/init.o obj/kern/libs/stdio.o obj/kern/libs/readline.o obj/kern/debug/panic.o obj/kern/debug/kdebug.o obj/kern/debug/kmonitor.o obj/kern/driver/clock.o obj/kern/driver/console.o obj/kern/driver/picirq.o obj/kern/driver/intr.o obj/kern/trap/trap.o obj/kern/trap/vectors.o obj/kern/trap/trapentry.o obj/kern/mm/pmm.o obj/libs/string.o obj/libs/printfmt.o
�ؼ�����:
-m:ģ��ָ������������
-nostdlib:��ʹ�ñ��⡣
-T:ָ�������ļ���
-o:ָ������ļ������ơ�
(3)���벢��������bootloader��
����ʹ��gcc��bootasm.S(���岢ʵ����bootloader����ִ�еĺ���start,�˺���������һ���ij�ʼ��,����˴�ʵģʽ������ģʽ��ת��,������bootmain.c�е�bootmain����)��bootmain.c(���岢ʵ����bootmain����ʵ����ͨ����Ļ�����ںͲ�����ʾ�ַ�����bootmain��������ucore����ϵͳ���ڴ�,Ȼ����ת��ucore����ڴ�ִ��)����Ŀ���ļ�,��ʹ��ld������Ŀ���ļ�����,����entry���Ϊstart��,�������ʼλ��Ϊ0x7c00,ʹ��sign����bootblock.o�ļ����������������ı�־,ʹ����Ϊbootloader��
+ cc boot/bootasm.S
gcc -Iboot/ -march=i686 -fno-builtin -fno-PIC -Wall -ggdb -m32 -gstabs -nostdinc -fno-stack-protector -Ilibs/ -Os -nostdinc -c boot/bootasm.S -o obj/boot/bootasm.o
+ cc boot/bootmain.c
gcc -Iboot/ -march=i686 -fno-builtin -fno-PIC -Wall -ggdb -m32 -gstabs -nostdinc -fno-stack-protector -Ilibs/ -Os -nostdinc -c boot/bootmain.c -o obj/boot/bootmain.o
+ cc tools/sign.c
gcc -Itools/ -g -Wall -O2 -c tools/sign.c -o obj/sign/tools/sign.o
gcc -g -Wall -O2 obj/sign/tools/sign.o -o bin/sign
+ ld bin/bootblock
ld -m elf_i386 -nostdlib -N -e start -Ttext 0x7C00 obj/boot/bootasm.o obj/boot/bootmain.o -o obj/bootblock.o
'obj/bootblock.out' size: 496 bytes
build 512 bytes boot sector: 'bin/bootblock' success!
(4)����OS�����ļ�
dd��һ��Unix����Unixϵͳ�ϵ�����,��Ҫ����Ϊת�������ļ�,����ʹ��dd���������յ�ucore�����ļ�,���С(bs)Ĭ��Ϊ512B��
ʹ��/dev/zero�����豸,����10000����Ŀ��ַ�(0x00),ÿ�����СΪ512B,���ucore.img�ܴ�СΪ5,120,000B��
���������д����е�ת��ѡ��Ϊnotrunc,��ζ�Ų���������ļ�������֮,�������ļ��Ѿ�����,��ôֻ�ı�ָ�����ֽ�,Ȼ���˳�,����������ļ���ʣ�ಿ�֡����û�����ѡ��,dd�������һ��512B�����ļ���
��bootloader(bin/bootblock�ļ�)���븴�Ƶ�ucore.img�ļ�ͷ��,��512B��С,��ֻ��ucore.img���ļ�ͷ����512B��
��kernel(bin/kernel�ļ�)���Ƶ�ucore.img���ļ�ͷƫ��1�����С�ĵط�,Ҳ��ucore.imgǰ512B��bootloader,�����ŷ�kernel��
dd if=/dev/zero of=bin/ucore.img count=10000
dd if=bin/bootblock of=bin/ucore.img conv=notrunc
dd if=bin/kernel of=bin/ucore.img seek=1 conv=notrunc
�ܽ�:ucore.img��һ��������bootloader��OS��Ӳ�̾���kernel���ں�,һ������������������������I/O(���������)Ҫ��ĵ��Գ���,����ЩҪ��ת��Ϊ���ϴ�����ָ��������봦����(CPU)����������������������д�����bootloader������������,һ������ͨ����Լ첢����װ�ز���ϵͳ������ϵͳ�����ļ��������ucore.img������ʵ����Ҳ������������������
2.һ����ϵͳ��Ϊ�Ƿ��Ϲ淶��Ӳ��������������������ʲô?
����һ�ʿ�֪,����bootloaderʱ,������sign������������һ�����Ϲ淶��Ӳ������������,������ǽ�ȡ��sign.c�IJ��ִ��������з�����
char buf[512];
memset(buf, 0, sizeof(buf));
FILE *ifp = fopen(argv[1], "rb");
int size = fread(buf, 1, st.st_size, ifp);
if (size != st.st_size) {
fprintf(stderr, "read '%s' error, size is %d.\n", argv[1], size);
return -1;
}
fclose(ifp);
buf[510] = 0x55; //��buf����������λ��Ϊ 0x55, 0xAA
buf[511] = 0xAA;
FILE *ofp = fopen(argv[2], "wb+");
size = fwrite(buf, 1, 512, ofp);
if (size != 512) { //��СΪ512�ֽ�
fprintf(stderr, "write '%s' error, size is %d.\n", argv[2], size);
return -1;
}
fclose(ofp);
printf("build 512 bytes boot sector: '%s' success!\n", argv[2]);
�ó�����Ҫ�����ǽ������ļ��ĵ�511���ֽ���Ϊ0x55,��512���ֽ���Ϊ0xAA�����ϵͳ����������������Ҫ�����:��СΪ512�ֽ�,��510��(�����ڶ���)�ֽ���0x55,��511��(������һ��)�ֽ���0xAA,�����ֽ����Ϊ0��
��ϰ2:ʹ��qemuִ�в�����lab1�е�������
Ϊ����Ϥʹ��qemu��gdb���еĵ��Թ���,���ǽ������µ�С��ϰ:
��CPU�ӵ��ִ�еĵ�һ��ָ�ʼ,��������BIOS��ִ�С�
�ڳ�ʼ��λ��0x7c00����ʵ��ַ�ϵ�,���Զϵ�������
��0x7c00��ʼ���ٴ�������,���������ٷ����õ��Ĵ�����bootasm.S�� bootblock.asm���бȽϡ�
�Լ���һ��bootloader���ں��еĴ���λ��,���öϵ㲢���в��ԡ�
��ʾ:�ο���¼���������һ��ִ�е�ָ�,���˽����ϸ�Ľ���,�Լ���ε������ԺͲ鿴BIOS���롣
��ʾ:�鿴 labcodes_answer/lab1_result/tools/lab1init �ļ�,����������������ε���bootloader��һ��ָ��:
$ cd labcodes_answer/lab1_result/
$ make lab1-mon
�������:
������Ҫͨ��Ӳ��ģ����qemu�����и���ʵ�顣��ʵ��Ĺ��������ǿ��ܻ����ϸ��ָ���������,�����DZ�Ҫ�ġ�qemu֧��ʹ��gdb���е�ǿ�������ĵ��ԡ������ú�qemu��gdb����ɸ���ʵ��Ļ���Ҫ�ء�
Ĭ�ϵ�gdb��Ҫ����һЩ��������òŽ���qemu�ĵ�������qemu��gdb֮��ʹ������˿�1234����ͨѶ���ڴ�qemu����ģ��֮��,ִ��gdb������
target remote localhost:1234
��������qemu,��ʱqemu�����ֹͣ״̬,����gdb�����
����,���ǿ�����Ҫqemu��һ��ʼ�����ȴ�ģʽ,�����Dz���ʹ��make qemu��ʼϵͳ������,��ʹ��make debug����������������qemu�㲻����gdb��δ���ӵ�ʱ�����������ˡ�gdb�ĵ�ַ�ϵ�
��gdb��������,ʹ��b *[��ַ]�������ָ���ڴ��ַ���öϵ�,��qemu�е�cpuִ�е�ָ����ַʱ,��Ὣ����Ȩ����gdb��
���ڴ���ķ����
�п���gdb����ȷ��ȡ��ǰqemuִ�еĻ��ָ��,ͨ���������ÿ�����ÿ��gdb������ǰǿ�Ʒ���൱ǰ��ָ��,��gdb�����л������ļ�������:define hook-stop x/i $pc end����
gdb�ĵ�������
��gdb��,��next, nexti, step, stepi��ָ�����������Գ���,���ǹ��ܸ�����ͬ,�������ڵ����ġ���ȡ��ϡ�
next:����������Դ�������һ��,�����뺯����
nexti:����һ������ָ��,�����뺯����
step:��������һ����ͬ��Դ������(�������뺯��)��
stepi:����һ������ָ�
����
1.��CPU�ӵ��ִ�еĵ�һ��ָ�ʼ,��������BIOS��ִ�С�
��ر���֪ʶ:
BIOS��������:��������ӵ��,һ�㲻ֱ��ִ�в���ϵͳ,����ִ��ϵͳ��ʼ��������ɻ���IO��ʼ�����������ع��ܡ���˵,ϵͳ��ʼ�����������ڲ���ϵͳ�ں�����֮ǰ���е�һ��С����������Intel 80386����ϵ�ṹ����,PC���е�ϵͳ��ʼ��������BIOS ��λ������/Ӳ�����������е�OS Boot Loaderһ����ɡ���Intel 80386Ϊ��,������ӵ��,CPU��������ַ0xFFFFFFF0(�ɳ�ʼ����CS:EIPȷ��,��ʱCS��IP��ֵ�ֱ���0xF000��0xFFF0))��ʼִ�С���0xFFFFFFF0����ֻ�Ǵ����һ����תָ��,ͨ����תָ������BIOS���г�����ʼ�㡣BIOS��������Ӳ���Լ�ͳ�ʼ����,��ѡ��һ�������豸(�������̡�Ӳ�̡����̵�),���Ҷ�ȡ���豸�ĵ�һ����(����������������������)���ڴ�һ���ض��ĵ�ַ0x7c00��,Ȼ��CPU����Ȩ��ת�Ƶ��Ǹ���ַ����ִ�С�����BIOS�ij�ʼ������������,��һ���Ĺ���������ucore��bootloader��
ʵģʽ:Intel���ڵ�8086 CPU�ṩ��20����ַ��,��Ѱַ�ռ䷶Χ��0~ 2 20 2^{20} 220��1MB�ڴ�ռ䡣��8086�����ݴ���λ��λ16λ,��ֱ��Ѱַ1MB�ڴ�ռ�,����8086�ṩ�˶ε�ַ��ƫ�Ƶ�ַ�ĵ�ַת�����ơ����ڴ�Ѱַ��ʽ��16λ�μĴ��������ݳ���16(10H),�����λ���ַ,�ټ���16λƫ�Ƶ�ַ�γ�20λ��������ַ�������Ѱַ�ռ�1MB,���ֶ�64KB����ʽ��ʾΪ:������ַ(physicaladdress)=��ֵ(segment)*16+ƫ��(offset)����CPU�ӵ��,�����ʵģʽ,ʵģʽ�����еĶζ��ǿ��Զ���д�Ϳ�ִ�е�,�Դ������ڴ���Ѱ��ָ�ִ�С�
����:
����Ҫ��BIOS���е�������,���ǻ��õ���gdb,��������Ȳ鿴Makefile�й���debug�Ĵ��롣
debug: $(UCOREIMG)
$(V)$(QEMU) -S -s -parallel stdio -hda $< -serial null &
$(V)sleep 2
$(V)$(TERMINAL) -e "gdb -q -tui -x tools/gdbinit"
���ǿ��Կ���debug���ֵĴ�����ͨ��tools/gdbinit�����ļ��е�����ʹgdb���е��Ե�,��������Ϊ:
file bin/kernel //����kernel,�����ط�����Ϣ
target remote :1234 //��qeum��������
break kern_init //���ϵ������ں˴������ں���
continue
����Ҫ��BIOS���е�������,������Ҫ������Ϊ:
set architecture i8086 //CPU��16λʵģʽ����
target remote :1234 //��qeum��������
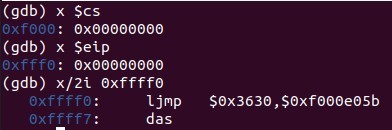
���ݱ���֪ʶ�Ľ���,���Ƕ�cs��eip���в鿴,���Կ�����һ��ָ���cs����Ϊ0xf000,eip(pc)����Ϊ0xfff0,һ��ʼCPU��16λ��ʵģʽ����,���������ַ=cs*16+eip=0xffff0��cs:eip=0xf000:0xfff0=0xffff0��
��˵�ַ0xffff0ΪBIOS����ڵ�ַ,�õ�ַ��ŵ�ָ��Ϊ��תָ��ljmp,��ת��0xf000:0xe05b=0xfe05b��ִ��BIOS���롣
��BIOS��ִ�н��е�����:
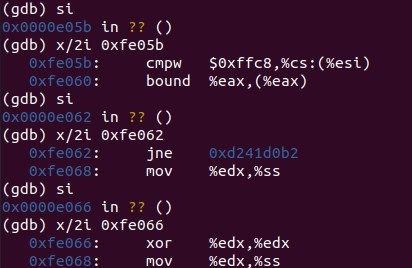
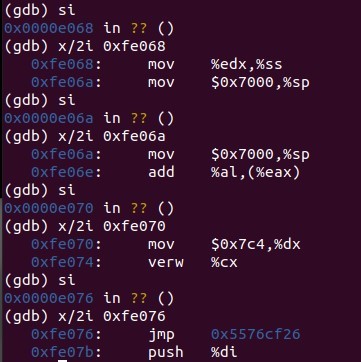
��0xfe05b�˴���ʼ,ִ��BIOS����,��BIOS��������Ӳ���Լ�ͳ�ʼ����,BIOS��ȡ������MBR�ϵ�bootloader����,������ŵ�0x7c00��,����cpu����Ȩ����bootloader����ִ�С���0xfcf24��ʼ,BIOS��Ȩ������bootloader��

2.�ڳ�ʼ��λ��0x7c00����ʵ��ַ�ϵ�,���Զϵ�������
��0x7c00������һ���ϵ�,ִ��c���е��ϵ�,��x/5i $pc�鿴0x7c00��5��������,��bootasm.S��ǰ����ָ����ͬ,֤ʵ�ϵ�����(Ҳ����gdbinit����)��

3.��0x7c00��ʼ���ٴ�������,���������ٷ����õ��Ĵ�����bootasm.S�� bootblock.asm���бȽϡ�
���Dz鿴Makefile�й���debug�Ĵ���,�ڵ���qemuʱ����-d in_asm -D $(BINDIR)/q.log����,�������Խ�ִ�й���ָ�����q.log�С�

Ȼ��make debug,����gdb�н��е���,��q.log�в鿴0x7c00���ķ�������:
��bootasm.S��bootblock.asm�ļ�,���������ļ��Ĵ�����ʵ��һ����,����q.log��0x7c00��Ĵ�����һ�¡�

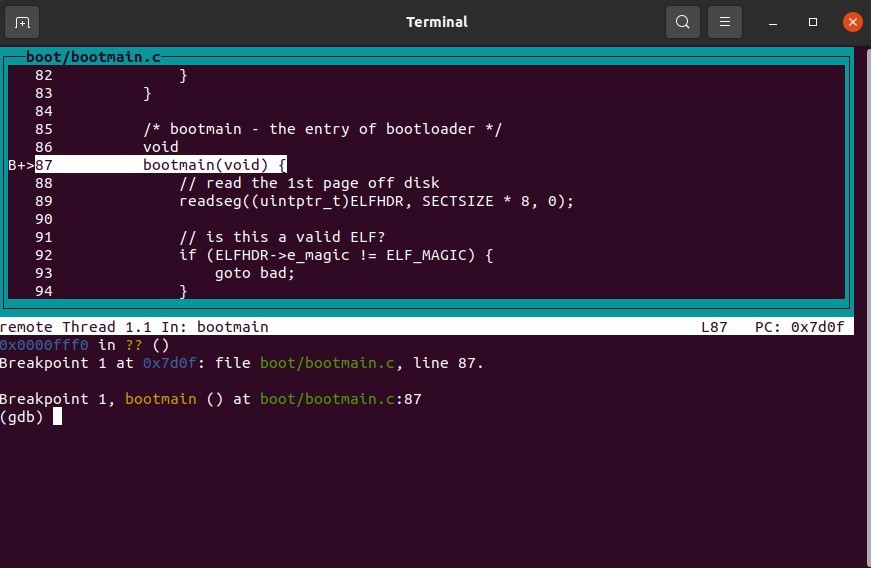
4.�Լ���һ��bootloader���ں��еĴ���λ��,���öϵ㲢���в��ԡ�
��gdbinit,���ϵ����õ�bootmain:
file obj/bootblock.o
target remote :1234
break bootmain
continue
gdb������������:
��ϰ3:����bootloader���뱣��ģʽ�Ĺ��̡�
����bootloader���뱣��ģʽ�Ĺ��̡�(Ҫ���ڱ�����д������)
BIOS��ͨ����ȡӲ���������������ڴ�,��ת������Ӧ�ڴ��е�λ��ִ��bootloader�������bootloader�������ɴ�ʵģʽ���뱣��ģʽ�ġ�
��ʾ:��Ҫ�Ķ�С�ڡ�����ģʽ�ͷֶλ��ơ���lab1/boot/bootasm.SԴ��,�˽���δ�ʵģʽ�л�������ģʽ,��Ҫ�˽�:
Ϊ�ο���A20,�Լ���ο���A20��
��γ�ʼ��GDT����
���ʹ�ܺͽ��뱣��ģʽ��
����
��ر���֪ʶ:
bootloader��Ҫ��ɵĹ���:
�л�������ģʽ,���÷ֶλ���;
��������ELFִ���ļ���ʽ��ucore����ϵͳ���ڴ�;
��ʾ�ַ�����Ϣ;
�ѿ���Ȩ����ucore����ϵͳ��
����ģʽ:��ǰ�����ʵģʽ��֪,ͨ��ʵģʽ��segment:offsetѰַ��ʽ����ַΪ0xffff<<4+0xffff=0x10ffef,������20����ַ������Ѱַ����,��8086�лᷢ����ַ�ؾ�,��ߵĵ�20λ������(��0��ʼ),ʵ�������ڴ��ַΪ0x0ffef�����Ĵ�����,��80286��80386��ӵ�и���ĵ�ַ��,Ϊʹ������ʵģʽ����8086���ֱ���һ��,ʵģʽ��ʹ�õ�20����ַ�ߺ�Ϊ0,�����ؾ�ʱ,��������ַ���ᳬ��1M���ڴ�ռ䡣���80386�ṩ�˷�ʽ�����Ƿ��A20��ַ��,��cpu���뱣��ģʽ���A20�����,ֻ���ڱ���ģʽ��,80386��ȫ��32����ַ����Ч,��Ѱַ�ߴ�4G�ֽڵ����Ե�ַ�ռ��������ַ�ռ�,�ɷ���64TB������ַ�ռ�,�ɲ��÷ֶδ洢�������ƺͷ�ҳ�洢�������ơ��ⲻ��Ϊ�洢�����ͱ����ṩ��Ӳ��֧��,����Ϊʵ������洢�ṩ��Ӳ��֧�֡�ͨ���ṩ4����Ȩ�������Ƶ���Ȩ������,����ʵ����Դ�������ܱ�֤�������ݵİ�ȫ������ĸ��롣
�ֶδ洢��������:�ֶλ��漰4���ؼ�����:����ַ����������(�����ε�����)������������(����������������ġ����顱)����ѡ����(�μĴ���,���ڶ�λ�����������б��������)��
���ж���������ʽ����:
�λ���ַ:�涨���Ե�ַ�ռ��жε���ʼ��ַ����80386����ģʽ��,�λ���ַ��32λ����Ϊ����ַ������Ѱַ��ַ�ij�����ͬ,�����κ�һ���ζ����Դ�32λ���Ե�ַ�ռ��е��κ�һ���ֽڿ�ʼ,������ʵ��ʽ�¹涨�ı߽���뱻16������
�ν���:�涨�εĴ�С����80386����ģʽ��,�ν�����20λ��ʾ,���Ҷν����������ֽ�Ϊ��λ����4K�ֽ�Ϊ��λ��
������:ȷ���εĸ������ʡ�
�ٶ������е�����λ(Granularity),�÷���G��ǡ�G=0��ʾ�ν������ֽ�λλ��λ,20λ�Ľ��ɱ�ʾ�ķ�Χ��1�ֽ���1M�ֽ�,����Ϊ1�ֽ�;G=1��ʾ�ν�����4K�ֽ�Ϊ��λ,����20λ�Ľ��ɱ�ʾ�ķ�Χ��4K�ֽ���4G�ֽ�,����Ϊ4K�ֽڡ�
������(TYPE):��������ͬ���͵����������ɱ�ʾ�������Ķ��Ǵ���λ������ݶ�,�������Ķ��Ƿ�ɶ�/д/ִ��,�ε���չ����ȡ�
��������Ȩ��(Descriptor Privilege Level)(DPL):����ʵ�ֱ������ơ�
�۶δ���λ(Segment-Present bit):�����һλΪ0,���������Ϊ�Ƿ���,���ܱ�����ʵ�ֵ�ַת�������һ���Ƿ������������ؽ�һ���μĴ���,�����������������쳣��ͼ5-4��ʾ�˵�����λΪ0ʱ,�������ĸ�ʽ������ϵͳ���������ʹ�ñ���ʶΪ����(AVAILABLE)��λ��
���ѷ���λ(Accessed bit):�����������ʸö�(��һ��ָ��ö���������ѡ���ӱ����ؽ�һ���μĴ���)ʱ,���Զ����÷���λ������ϵͳ�������λ��
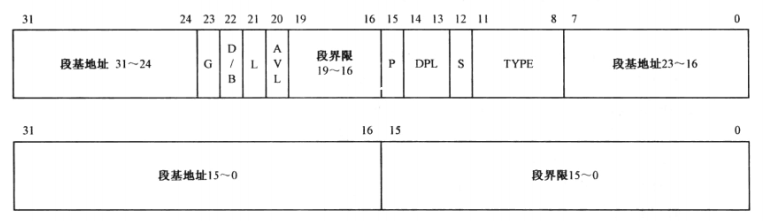
���ж���������Ϊȫ�ֶ���������(GDT)�뱾�ض���������(LDT),��ucore��ֻʹ����GDT��
ȫ�ֶ��������Ĵ���(GDTR)��ʽ������ʾ,��Ϊ32λ��ַ��16λ����:

��ַ�ռ�:
����ַ�ռ�:��Ӧ�ó���ĽǶȿ�,����ַ�ռ����Ӧ�ó���Ա������õ��ĵ�ַ�ռ䡣
������ַ�ռ�:�Ӳ���ϵͳ�ĽǶȿ�,CPU���ڴ�Ӳ��(ͨ��˵�ġ��ڴ�����)��������������Ҫ������Ӳ����Դ���ڴ�Ӳ��������ֲ���������ַ�ռ��С�
�����ַ�ռ�:һ̨�����ֻ��һ��������ַ�ռ�,���ڲ���ϵͳ�Ĺ�����,ÿ��������Ϊ�Լ���ռ�����������������ַ�ռ䡣Ϊ���ö�������ܹ���Ч��������ʹ��������ַ�ռ�,�������Ե�ַ�ռ�(Ҳ�������ַ�ռ�)�ĸ��
���ֵ�ַ��ϵ����:
�����ֶλ���,δ������ҳ����:����ַ�C> (�ֶε�ַת��) -->���Ե�ַ==������ַ
�����ֶκͷ�ҳ����:����ַ�C> (�ֶε�ַת��) -->���Ե�ַ�C>(��ҳ��ַת��) -->������ַ
����ģʽ�µ���Ȩ��:
CPL:��ǰ��Ȩ��(Current Privilege Level) ������CS�μĴ���(ѡ����)�������λ,CPL���ǵ�ǰ�����ε���Ȩ��,�����������˵�ǰ��ִ�г������Ȩ����
DPL:��������Ȩ(Descriptor Privilege Level) �洢�ڶ��������е�Ȩ��λ,����������Ӧ����������Ȩ�ȼ�,Ҳ���Ƕα�����������Ȩ����
RPL:������Ȩ��RPL(Request Privilege Level) RPL������ѡ���ӵ������λ��RPL˵�����ǽ��̶Զη��ʵ�����Ȩ��,��˼�ǵ�ǰ������Ҫ������Ȩ�ޡ�RPL��ֵ�ɳ���Ա�Լ������ɵ�����,����һ��RPL>=CPL,���ǵ�RPL < CPLʱ,ʵ�������õľ���CPL��,��Ϊ����ʱ����Ȩ������ж�:max(RPL,CPL)<=DPL�Ƿ����,����RPL���Կ�����ÿ�η���ʱ�ĸ�������,RPL=0ʱ����������С,RPL=3ʱ�����������
����A20��ַ��(�ο�bootasm.S):
�ȴ�8042 Input bufferΪ��;
����Write 8042 Output Port (P2)���8042 Input buffer;
�ȴ�8042 Input bufferΪ��;
��8042 Output Port(P2)�õ��ֽڵĵ�2λ��1,Ȼ��д��8042 Input buffer��
����:
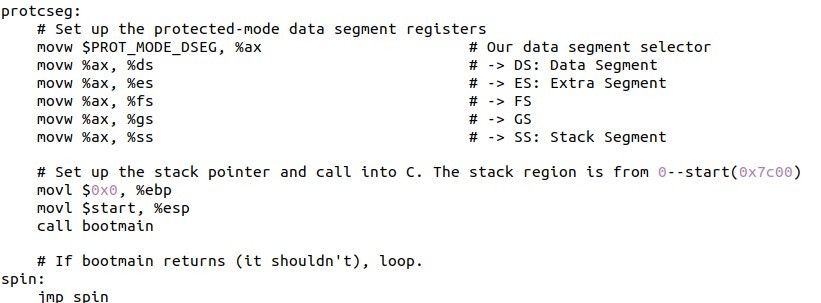
����,��������bootloader�����,�ֱ�Ϊ
asm.h(��bootasm.S����ļ�����Ҫ��ͷ�ļ�,��Ҫ��һЩ��X86����ģʽ�Ķη��ʷ�ʽ��صĺ궨��)
bootasm.S(���岢ʵ����bootloader����ִ�еĺ���start,����A20,����GDT,�����뱣��ģʽ,����bootmain����)
bootmain.c(����kernel���ڴ�,Ȼ����ת��ucore����ڴ�ִ��)��
����ϰ��,���ǽ������ǰ�����ļ���

1.�������
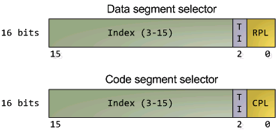
bootasm.Sһ��ʼ�ȶ�������������

PROT_MODE_CSEG��PROT_MODE_DSEG�ֱ���Ϊ�ں˴���Ρ����ݶε�ѡ���ӡ�������ͼ��֪,���߷ֱ�ָ��GDT[1]��GDT[2],RPLΪ0,CPLΪ0����CRO_PE_ON�����л�������ģʽʱ��ʹ�ܱ�־��
ѡ���Ӹ�ʽ����:
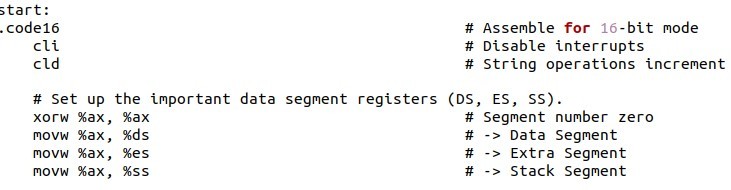
2.�ر��ж�
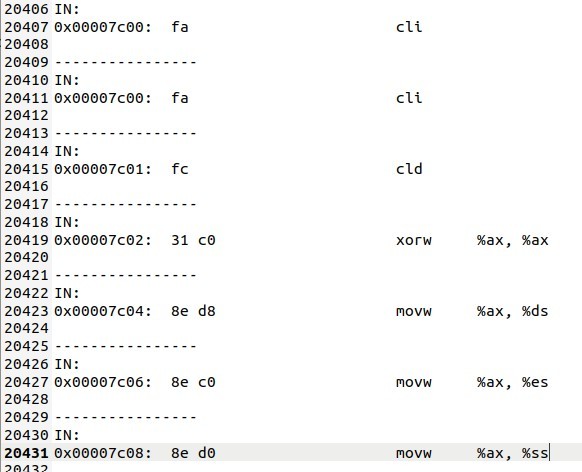
bootloader��ڵ�ַΪstart����,��ʱ����ʵģʽ��������Ҫ�ر��ж�,��������жϱ�BIOS�жϴ�����������֮�����μĴ�����ַ��Ϊ0��
# start address should be 0:7c00, in real mode, the beginning address of the running bootloader
.globl start
start:
.code16 # 16λʵģʽ
cli # �ر��ж�
cld # �ӵ͵�ַ���ߵ�ַ
# Set up the important data segment registers (DS, ES, SS). #��ʼ���μĴ���
xorw %ax, %ax # ���μĴ�����ַ��Ϊ0
movw %ax, %ds # -> Data Segment
movw %ax, %es # -> Extra Segment
movw %ax, %ss # -> Stack Segment
3.����A20
��ǰ�汳��֪ʶ֪����A20��Ϊ4��:
(1)�ȴ�8042 Input bufferΪ��,���ȴ�8042оƬΪ����״̬���ж�8042�Ƿ���п���ͨ��ѭ����ȡ8042��״̬�Ĵ�����CPU�Ĵ���al,�ж�al�Ƿ�Ϊ0x2(оƬ��ʼϵͳ״̬)��ʵ�֡�

(2)����Write 8042 Output Port (P2)���8042 Input buffer��

(3)�ٶȵȴ�8042 Input bufferΪ�ա�

(4)��8042 Output Port(P2)�õ��ֽڵĵ�2λ��1,Ȼ��д��8042 Input buffer��

����A20������ϡ�
4.��ʼ��GDT��
�ڷֶδ洢�������Ƶı���ģʽ��,ÿ���������������������ж���:�λ���ַ���ν��Ͷ����ԡ���asm.h�ļ�ͨ����ķ�ʽ�������˳�ʼ�����������ĺ꺯��,����������鿴asm.h:
/* Normal segment */
#define SEG_NULLASM \
.word 0, 0; \
.byte 0, 0, 0, 0
SEG_NULLASM��.word��������һ���ֳ���(�˴�2�ֽ�,��16λʵģʽ������)����, ��.byte��������һ���ֽڵ��������SEG_NULLASM����Ҫ����������(ÿ����2�ֽ�)���ȵ���0,��������4���ֽڵ���0��
#define SEG_ASM(type,base,lim) \
.word (((lim) >> 12) & 0xffff), ((base) & 0xffff); \
.byte (((base) >> 16) & 0xff), (0x90 | (type)), \
(0xC0 | (((lim) >> 28) & 0xf)), (((base) >> 24) & 0xff)
SEG_ASM��,����word�ֱ���Ϊ0xffff��0x0000��ǰ����0xffffffff����12λ��Ϊ0x000fffff,Ȼ����0x0000ffff������õ�0xffff,��������0x0000&0xffff=0x0000�����ں����4��byte,��һ��Ϊ0x00(�λ�ַ23~16 ),�ڶ���Ϊ0x90( P=1��DPL=00��S=1��TYPE=type),������Ϊ0xcf(G=1��D/B=1��L=0��AVL=0���ν���19~16 ),���ĸ�Ϊ0x00(�λ�ַ31~24)��
�ٽ����ͼ,�ɴ����ǿ�֪�������������СΪ8�ֽ�,��64λ,0xffff��Ӧ��������0-15λ,0x0000��Ӧ16-31λ,Ȼ��4��byte��Ӧ��λ���������õ��Ķλ���ַ����0x00000000��
�˽��˶���������γ�ʼ����,�����ٴλص�bootasm.S,�鿴GDT�ij�ʼ����
# Bootstrap GDT,����GDT��
.p2align 2 # force 4 byte alignment,ǿ��4�ֽڶ���
gdt:
SEG_NULLASM # null seg,�ն�
SEG_ASM(STA_X|STA_R, 0x0, 0xffffffff) # code seg for bootloader and kernel
SEG_ASM(STA_W, 0x0, 0xffffffff) # data seg for bootloader and kernel
gdtdesc:
.word 0x17 # sizeof(gdt) - 1,GDT�߽�,������,��3 * 8 = 24 B,ֵΪ24 - 1 = 23 (0x17)
.long gdt # address gdt,GTD��ַ,����32
GDT������Ϊ4�ֽڶ���,��������GDT[0](�ն�)��GDT[1](�ں˴����)��GDT[2](�ں����ݶ�)������κ����ݶλ�ַ��Ϊ0,�ܳ��ȶ�Ϊ�����ڴ�ռ�4G��С,�������ַ=���Ե�ַ��
5.���뱣��ģʽ
��ʼ��GDT��,ͨ��lgdtָ������GDT��Ϣд��GDTR����ʱ�����Ѿ����bootloader�л�������ģʽ��ȫ������������������ģʽ����Ҫ���ƼĴ���CR0����Ӧ�ı�־λ,ͨ�����֮ǰ�����CR0_PE_ON����ʵ�֡�
# Switch from real to protected mode, using a bootstrap GDT
# and segment translation that makes virtual addresses
# identical to physical addresses, so that the
# effective memory map does not change during the switch.
lgdt gdtdesc #��GDT��Ϣд��GDTR��
movl %cr0, %eax
orl $CR0_PE_ON, %eax
movl %eax, %cr0 #����ģʽ
��ʱCPU����������32λģʽ,������ģʽ�������ģʽ��,ljmpָ�����³�ʼ���˴���μĴ���CS��ֵ,����CS��ǰ12λΪ0x001,�������8Ϊ0x008��Ϊgdt����ƫ��ֵ��ѡ���������,������ѡ��ΪCS��������,��BaseΪ0,ƫ�Ƶ�ַ��Ϊprotcseg�ĵ�ַ����Ҫע�����,��������bootloader����������ʵģʽ���ص��ڴ�ʱ���0x7c00��������ַ���λ�ڴ����,�ʵ������ڷֶ�ģʽ���趨Base��ַΪ0ʱ,ƫ�Ƶ�ַΪprotcseg��ַʱ,�ڱ���ģʽ������������bootloader��protcseg�δ��롣
# Jump to next instruction, but in 32-bit code segment.
# Switches processor into 32-bit mode.
ljmp $PROT_MODE_CSEG, $protcseg
������жμĴ�������ΪPROT_MODE_DSEG(ָ���ں����ݶ�)����ջ��������Ϊ0x00~0x7c00,��bootloader֮�¶���ջ�Ŀռ�,Ȼ��ʹ��callָ��ִ��bootmain.c,��ʼ����kernel��bootmain��������������᷵��,������ؿ϶���bootloader��������,������ѭ����
��ϰ4:����bootloader����ELF��ʽ��OS�Ĺ��̡�
ͨ���Ķ�bootmain.c,�˽�bootloader��μ���ELF�ļ���ͨ������Դ�����ͨ��qemu�����в�����bootloader&OS,���ش�
bootloader��ζ�ȡӲ��������?
bootloader����μ���ELF��ʽ��OS?
��ʾ:���Ķ���Ӳ�̷��ʸ�����,��ELFִ���ļ���ʽ����������С�ڡ�
����
1.bootloader��ζ�ȡӲ��������?
��ر���֪ʶ:
���̵Ķ�ȡ��ʽ��Ҫ������CHS(Cylinder Head Sector)��LBA(Logical Block Address),CHSͨ������-��ͷ-��������ֵ���ж�λ,��Ϊ�鷳����LBA��ʽ��һ��������ϸ��,�����̰��������Ž���ͳһ��ַ,����ʱ���������ż��ɡ����ǵ�ʵ�ֵļ���,bootloader�ķ���Ӳ�̶���LBAģʽ��PIO(Program IO)��ʽ,�����е�IO������ͨ��CPU����Ӳ�̵�IO��ַ�Ĵ�����ɡ�
һ��������2��IDEͨ��,ÿ��ͨ�����Խ�2��IDEӲ�̡����ʵ�һ��Ӳ�̵�����������IO��ַ�Ĵ���0x1f0-0x1f7ʵ�ֵ�,����������±���һ���һ��IDEͨ��ͨ������IO��ַ0x1f0-0x1f7��ʵ��,�ڶ���IDEͨ��ͨ������0x170-0x17fʵ�֡�ÿ��ͨ���������̵�ѡ��ͨ����6��IOƫ�Ƶ�ַ�Ĵ��������á�
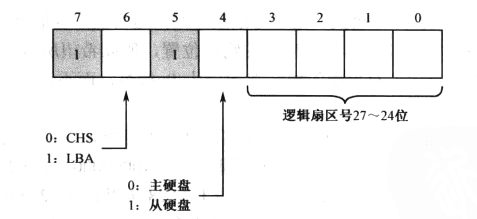
����IO��ַ�Ͷ�Ӧ����(��6λ:Ϊ1=LBAģʽ,Ϊ0=CHSģʽ,��7λ�͵�5λ����Ϊ1)

ͨ��0x1f6�˿ڿ������������̡����ʷ�ʽ�Լ�������27��24λ��
����:
һ��������СΪ512�ֽ�,��һ������������(�ɲο�boot/bootmain.c�е�readsect����ʵ��)��������:
(1)�ȴ��������á�
(2)������ȡ���������
(3)�ȴ��������á�
(4)�Ѵ����������ݶ���ָ���ڴ档
����������鿴bootmain.c�ļ���
(1)�ȴ��������á�
#define SECTSIZE 512
#define ELFHDR ((struct elfhdr *)0x10000) // scratch space
/* waitdisk - �ȴ����������� */
static void
waitdisk(void) {
while ((inb(0x1F7) & 0xC0) != 0x40)
/* ��ѭ���ȴ� */;
}
��ȡ0x1f7�˿�����ȡ���̿�����״̬,����7λΪ1,��ʾ������æ,��Ҫ�ȴ�,����7λΪ0,��6λΪ1,��ʾ��������

(2)������ȡ���������
(3)�ȴ��������á�
/* readsect - read a single sector at @secno into @dst */
/* ��ȡ���Ϊsecno��һ��������dst��ַ�� */
static void
readsect(void *dst, uint32_t secno) {
// �ȴ�����������
waitdisk();
outb(0x1F2, 1); //��ȡ������Ŀ1
outb(0x1F3, secno & 0xFF); //��ȡ������0~7λ
outb(0x1F4, (secno >> 8) & 0xFF); //��ȡ������8~15λ
outb(0x1F5, (secno >> 16) & 0xFF); //��ȡ������16~23λ
outb(0x1F6, ((secno >> 24) & 0xF)|0xE0);
//����0xF��������28~31λ����,������24~27λ�����0xE0�ܿ���IO�˿ڵ�4λ,Ŀ���Ƕ�ȡ���̡�
outb(0x1F7, 0x20); //0x20Ϊ��ȡ��������
// �ȴ�����������
waitdisk();
// ��ȡ������
insl(0x1F0, dst, SECTSIZE / 4); //SECTISE������Ϊ512�ֽ�,��inslÿ�ζ�ȡ4�ֽ�,����SECTISEҪ��4��
}
readsect��������ȡһ�������ĺ���,����outb��insl�������Dz����������ķ�ʽ,�����õĻ�������װΪ�����ĺ���,�����ڸ���,ͷ�ļ�x86.hΪһЩ���õ�������ຯ����װ��
(4)�Ѵ����������ݶ���ָ���ڴ档
/* *
* readseg - read @count bytes at @offset from kernel into virtual address @va,
* might copy more than asked.
* ���ں˵�offsetƫ�ƴ���ȡcount���ֽڵ������ַva��,���ܸ��Ƶ��ֽ������������count����
* */
static void
readseg(uintptr_t va, uint32_t count, uint32_t offset) {
uintptr_t end_va = va + count;
// ���¶������̱߽�
va -= offset % SECTSIZE;
// ��ƫ����תΪ������,�ں�ʼ������1
uint32_t secno = (offset / SECTSIZE) + 1;
// If this is too slow, we could read lots of sectors at a time.
// We'd write more to memory than asked, but it doesn't matter --
// we load in increasing order.
for (; va < end_va; va += SECTSIZE, secno ++) {
readsect((void *)va, secno);
}
}
readseg�����ṩ�Ĺ����ǴӴ��̶�ȡcount�ֽ����ݵ������ַva��,���Ƕ�ȡӲ������512�ֽڵ�����Ϊ��λ�ġ�����ʵ�ʶ�����ֽ����ܿ��ܴ���Ҫ�������ֽ��������ǵ�readseg��ƫ�ƶ�ȡ,ͨ��va -= offset % SECTSIZE�����¶������̱߽�,�����ȡ�������ں��ļ�����ʼ���ݲ�λ��һ�������Ŀ�ʼ,Ӧ��va��С,ʹ��������ȡһ��������,ԭva�����þ����ں��ļ�����ƫ��offset�����ʼ���ݡ�
2.bootloader����μ���ELF��ʽ��OS?
��ر���֪ʶ:
�������ȵ��˽��ΪELF,ELF(Executable and linking format)�ļ���ʽ��Linuxϵͳ�µ�һ�ֳ���Ŀ���ļ�(object file)��ʽ,��������Ҫ����:��ִ���ļ�,���ض�λ�ļ�,����Ŀ���ļ�����ʵ���OS�ļ����ͼ�Ϊ��ִ���ļ�,������ǽ�������ִ���ļ�����ִ���ļ������ṩ����Ľ���ӳ��,���ص��ڴ�ִ��,��Ҫ��ELF�ļ�ͷ������ͷ���Լ���Ӧ�����,��ELF header���ļ���ʼ�������������ļ�����֯��
ELF���ļ�ͷ��������ִ���ļ��Ŀ��ƽṹ,�䶨����libs/elf.h��:
#define ELF_MAGIC 0x464C457FU // "\x7FELF" in little endian ELFħ��,С�˴洢
/* ELF�ļ�ͷ */
struct elfhdr {
uint32_t e_magic; // ELFħ��,7f 45 4c 46
uint8_t e_elf[12]; // ELF��ʽ��Ϣ,32/64λ,���/С�˴洢
uint16_t e_type; // 1=relocatable, 2=executable, 3=shared object, 4=core image
uint16_t e_machine; // ELF��ϵ�ṹ����,3=x86, 4=68K, etc.
uint32_t e_version; // �ļ��汾,��Ϊ1
uint32_t e_entry; // ��ִ�г�����������ַ
uint32_t e_phoff; // ����ͷ���ļ��ڵ��ֽ�ƫ����
uint32_t e_shoff; // ��ͷ�����ļ��ڵ��ֽ�ƫ����
uint32_t e_flags; // ��������ر�ʶ,ͨ��Ϊ0
uint16_t e_ehsize; // ELF header�ļ�ͷ�ֽڴ�С
uint16_t e_phentsize; // ����ͷÿ����Ŀ(entry)���ֽڴ�С
uint16_t e_phnum; // ����ͷ��Ŀ����,���εĸ���
uint16_t e_shentsize; // ��ͷ��ÿ����Ŀ(entry)���ֽڴ�С
uint16_t e_shnum; // ��ͷ������Ŀ������,���ڵĸ���
uint16_t e_shstrndx; // string name table�ڽ�ͷ���е�����index
};
����ͷ�����������������еĸ�����Ϣ,�����Ρ����ݶε�,��Щ��������������ڴ���ִ�еij�����ͷ���ṩ�˸����������ַ�ռ��������ַ�ռ��еĴ�С��λ�á���־��������Ȩ�Ͷ��뷽�����Ϣ������ͷ��ͬ��������elf.h��:
struct proghdr {
uint32_t p_type; // ������, ��ɼ��صĴ���λ����ݶΡ���̬������Ϣ�ε�
uint32_t p_offset; // �������ļ��ڵ���ʵƫ��
uint32_t p_va; // �������ڴ��е���ʼ�����ַ
uint32_t p_pa; // �������ڴ��е���ʼ������ַ,��ʹ��
uint32_t p_filesz; // �������ļ��еĴ�С
uint32_t p_memsz; // �������ڴ��еĴ�С(�������bss��,�����)
uint32_t p_flags; // ������صı�־,���/д/ִ��
uint32_t p_align; // ����,��Ӳ��ҳ��Сһ��;���Ϊ0��1,��ʾ����Ҫ���롣����,p_alignӦ����2����������,p_va��p_offset�ڶ�p_alignȡģ��Ӧ���
};
����:
����ͨ��readelf -e kernel���鿴kernel ELF�ļ������Ϣ,������ELF�ļ�ͷ����Ϣ:
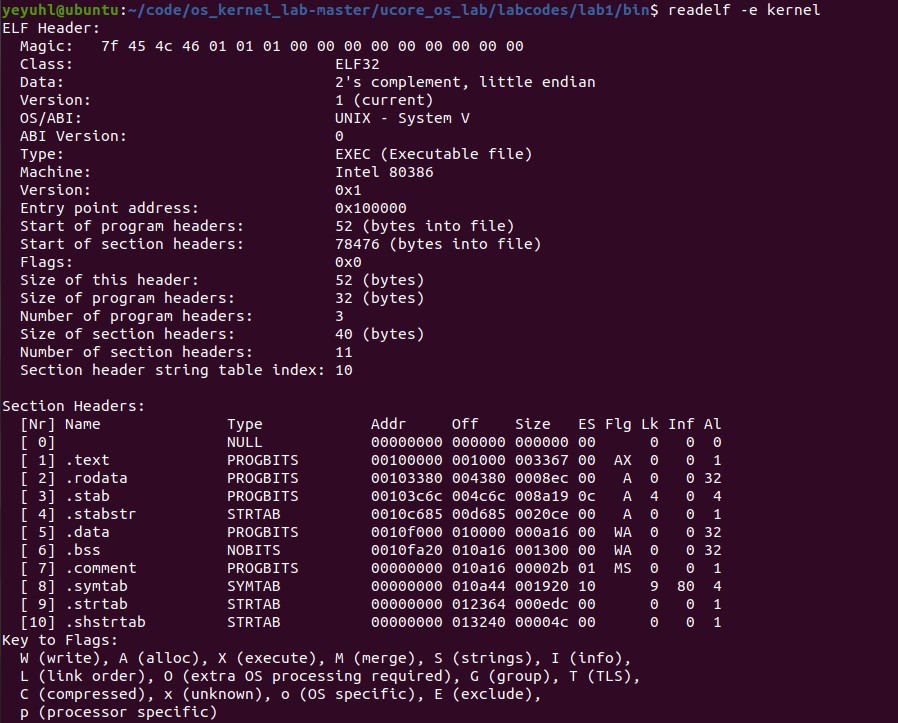
�ɼ�������������ַΪ0x100000,����ͷ��ƫ��Ϊ52B,����ͷ����ĿΪ3��
���������鿴����ͷ������Ϣ:
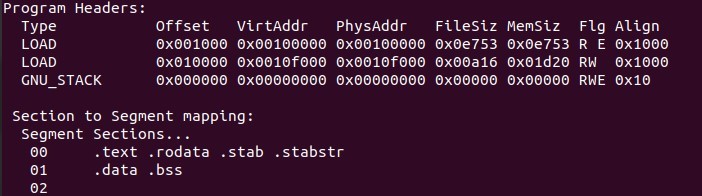
�ɼ�һ��������������,��һ�����Ǵ����,�ڶ����������ݶ�,���������ǿն�,�����ǰ��GDT�ķ��������
����������������bootmain.c,������OS�Ĵ�������:

�����ɵ���������Ϊ:
(1)�ȴ�Ӳ�̶�ȡһҳ��С����(4K)���ڴ�0x10000��ַ��,����ȡkernel��ELF�ļ�ͷ�ͳ���ͷ�����ص�ELFHDR(0x10000)����
(2)Ȼ��ͨ��ELF�ļ�ͷ��ħ���ж�ELF�ļ���ʽ�Ƿ�Ϸ���
(3)�����ʽ�Ϸ�����kernel�е�ELF�ļ�ͷ�ͳ���ͷ���е���Ϣ��kernel���μ��ص��ڴ��С�
(4)������ELF�ļ�ͷ����������Ϣ,�ҵ��ں˵���ڡ�
��ϰ5:ʵ�ֺ������ö�ջ���ٺ�����
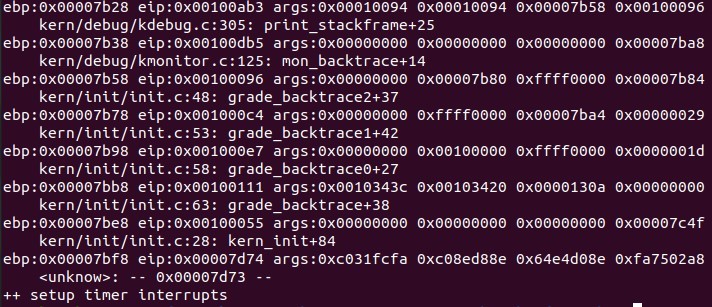
������Ҫ��lab1�����kdebug.c�к���print_stackframe��ʵ��,����ͨ������print_stackframe�����ٺ������ö�ջ�м�¼�ķ��ص�ַ��������ܹ���ȷʵ�ִ˺���,����lab1��ִ�� ��make qemu����,��qemuģ�����еõ��������µ����:
����
ebp:0x00007b28 eip:0x00100992 args:0x00010094 0x00010094 0x00007b58 0x00100096
kern/debug/kdebug.c:305: print_stackframe+22
ebp:0x00007b38 eip:0x00100c79 args:0x00000000 0x00000000 0x00000000 0x00007ba8
kern/debug/kmonitor.c:125: mon_backtrace+10
ebp:0x00007b58 eip:0x00100096 args:0x00000000 0x00007b80 0xffff0000 0x00007b84
kern/init/init.c:48: grade_backtrace2+33
ebp:0x00007b78 eip:0x001000bf args:0x00000000 0xffff0000 0x00007ba4 0x00000029
kern/init/init.c:53: grade_backtrace1+38
ebp:0x00007b98 eip:0x001000dd args:0x00000000 0x00100000 0xffff0000 0x0000001d
kern/init/init.c:58: grade_backtrace0+23
ebp:0x00007bb8 eip:0x00100102 args:0x0010353c 0x00103520 0x00001308 0x00000000
kern/init/init.c:63: grade_backtrace+34
ebp:0x00007be8 eip:0x00100059 args:0x00000000 0x00000000 0x00000000 0x00007c53
kern/init/init.c:28: kern_init+88
ebp:0x00007bf8 eip:0x00007d73 args:0xc031fcfa 0xc08ed88e 0x64e4d08e 0xfa7502a8
<unknow>: -- 0x00007d72 �C
����
�����ʵ��,��������Ƿ���������ʾ����һ��,���������һ�и�����ֵ�ĺ��塣
��ʾ:���Ķ�С�ڡ�������ջ��,�˽��������ν����������ù�ϵ�ġ������lab1�����,�鿴lab1/obj/bootblock.asm,�˽�bootloaderԴ�������������͵�ַ�ȵĶ�Ӧ��ϵ;�鿴lab1/obj/kernel.asm,�˽�ucore OSԴ�������������͵�ַ�ȵĶ�Ӧ��ϵ��
Ҫ����ɺ���kern/debug/kdebug.c::print_stackframe��ʵ��,�ύ�Ľ���Դ�����(���Ա���ִ��),����ʵ�鱨���м�Ҫ˵��ʵ�ֹ���,��д������������Ļش�
�������:
������ʾ������ջ�ṹ��Ҫ�����ں��ļ��еĵ��Է���,��Ϊ���Ӻͷ�������������һЩ������������ʹ�á��������ͨ������print_debuginfo������ɲ��Ҷ�Ӧ����������ӡ����Ļ�Ĺ��ܡ�������Բμ�kdebug.c�����е�ע�͡�
����
��ر���֪ʶ:
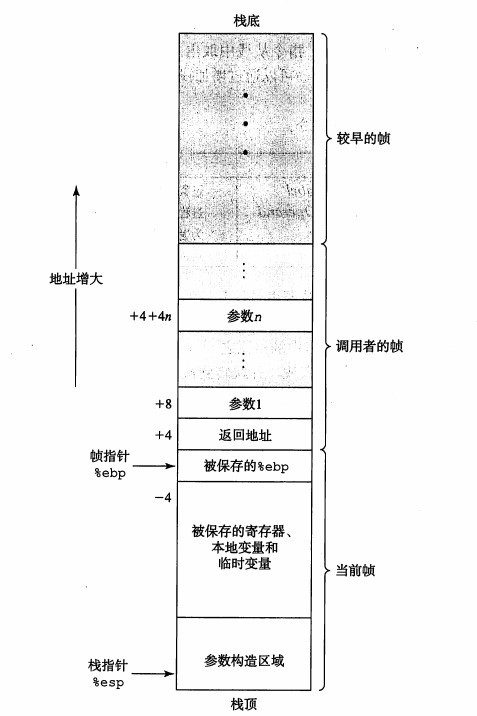
������ջ:��ջ�Ǻ�������ʱ���ڴ�ռ�,�ɸߵ�ַ��͵�ַ����,ebp�Ĵ����洢ջ��ַ,esp�Ĵ����洢ջ����ַ,ʼ��ָ��ջ��Ԫ��;ջ�Ӹߵ�ַ���ַ������
��������ʱ��Ҫ�������²���:
������:
(1)�������ú����IJ�����������������ջ��
(2)ִ��call����,��call�������һ��ָ���ַ,Ҳ�����ص�ַ,ѹջ,ͬʱ��ת�������ú���ִ�С�
�����ú���:
(1)pushl %ebp:�������ߵ�ջ��ַ��ջ,���ڷ��ص���������ִ�С�
(2)movl %esp, %ebp:%ebpָ��ǰջ��,Ҳ����%espָ����ͬ,�˺����Ķ�ջ�ʹ˽�������ִ��,��ʱ����ѹ���ջ��
(3)movl %ebp, %esp:%espָ��ú�����ջ�ס�
(4)popl %ebp:��%ebpջ��ָ������ָ������ߺ�����ջ��ַ��
(5)ret:�����ú�����ջ���������ص�ַ,���ص����ú�������ִ�С�
1.�����ջ��Ϣ
void
print_stackframe(void) {
/* LAB1 : STEP 1 */
/* (1) call read_ebp() to get the value of ebp. the type is (uint32_t);
* (2) call read_eip() to get the value of eip. the type is (uint32_t);
* (3) from 0 .. STACKFRAME_DEPTH
* (3.1) printf value of ebp, eip
* (3.2) (uint32_t)calling arguments [0..4] = the contents in address (uint32_t)ebp +2 [0..4]
* (3.3) cprintf("\n");
* (3.4) call print_debuginfo(eip-1) to print the C calling function name and line number, etc.
* (3.5) popup a calling stackframe
* NOTICE: the calling funciton's return addr eip = ss:[ebp+4]
* the calling funciton's ebp = ss:[ebp]
*/
uint32_t ebp=read_ebp(),eip=read_eip(); //���ebp��eip�ij�ֵ
int i,j;
for(i=0;i<STACKFRAME_DEPTH&&ebp;i++){
cprintf("ebp:0x%08x eip:0x%08x args:",ebp,eip);//���ebp��eip
uint32_t *arguments=(uint32_t *)ebp+2; //����ebp+2�ĵ�ַ,��ò���
for(j=0;j<4;j++){
cprintf("0x%08x ",arguments[j]); //���ÿһ����
}
cprintf("\n");
print_debuginfo(eip-1); //���caller����Ϣ
eip=((uint32_t *)ebp)[1]; //����ebp��eip
ebp=((uint32_t *)ebp)[0];
}
}
�ô�������ͨ��������ȡebp��eip�Ĵ���ֵ,�ֱ��ʾָ��ջ�ĵ�ַ����ǰָ��ĵ�ַ��Ȼ�������ջ�е���Ϣ�����ն�Ӧ��ʽ���ebp,eip�洢����Ϣ(0x%08x:��0x"Ϊ��ͨ�ַ������ʾ16���Ƹ�ʽ;��%08x"�Զ����16���Ƹ�ʽ���8λ�ַ�,����8λ��ǰ��0)��������ebp+2(ָ��+2,��ַ+8)�ĵ�ַ,��ò���(��ǰ���ͼ��֪������+8��ʼ)��Ȼ�����ÿһ����,�����������caller����Ϣ���Ҹ���ebp��eip(((uint32_t *)ebp)[1]= *(uint32_t *)(ebp + 4),�����ص�ַ;((uint32_t *)ebp)[0]= *(uint32_t *)(ebp),����һ��������ebp��ַ)��
��������:
2.�������һ�и�����ֵ�ĺ���
���һ����ebp:0x00007bf8 eip:0x00007d74 args:0xc031fcfa 0xc08ed88e 0x64e4d08e 0xfa7502a8,����ebp,eip��args�������,����ֱ�������͡�
ebp:0x00007bf8:��ʱebp��ֵ��kern_init������ջ����ַ,��ǰ����ϰ����֪��,����ջ��ջ����ַΪ0x00007c00,ebpָ���ջλ�ô�ŵ����ߵ�ebp�Ĵ�����ֵ,ebp+4ָ���ջλ�ô�ŷ��ص�ַ��ֵ,����ζ��kern_init�����ĵ�����(Ҳ����bootmain����)û�д����κ������������!��Ϊ���Ǵ�žɵ�ebp�����ص�ַ�Ѿ�ռ��8�ֽ��ˡ�
eip:0x00007d74:eip��ֵ��kern_init�����ķ��ص�ַ,Ҳ����bootmain��������kern_init��Ӧ��ָ�����һ��ָ��ĵ�ַ,�����bootmain����֤ʵ������жϡ�

args:0xc031fcfa 0xc08ed88e 0x64e4d08e 0xfa7502a8:һ����˵,args��ŵ�4��Ԫ���Ƕ�Ӧ4�����������ֵ��������Ƚ�����,����bootmain��������kern_init��û�����κ��������,����ջ����λ��ǡ����bootloader��һ��ָ���ŵĵ�ַ������,��argsǡ����kern_int��ebp�Ĵ���ָ���ջ�����ϵ�2~5����Ԫ,���args��ŵľ���bootloaderָ���ǰ16���ֽڡ�

��ϰ6:�����жϳ�ʼ���ʹ���
����ɱ��빤���ͻش���������:
1.�ж���������(Ҳ�ɼ��Ϊ����ģʽ�µ��ж�������)��һ������ռ�����ֽ�?�����ļ�λ�����жϴ�����������?
2.��������kern/trap/trap.c�ж��ж����������г�ʼ���ĺ���idt_init����idt_init������,���ζ������ж���ڽ��г�ʼ����ʹ��mmu.h�е�SETGATE��,���idt�������ݡ�ÿ���жϵ������tools/vectors.c����,ʹ��trap.c��������vectors���鼴�ɡ�
3.��������trap.c�е��жϴ�������trap,�ڶ�ʱ���жϽ��д����IJ�����дtrap�����д���ʱ���жϵIJ���,ʹ����ϵͳÿ����100��ʱ���жϺ�,����print_ticks�ӳ���,����Ļ�ϴ�ӡһ�����֡�100 ticks����
��ע�⡿����ϵͳ�����ж�(T_SYSCALL)ʹ����������������Ȩ��Ϊ�û�̬Ȩ������,�����жϾ�ʹ����Ȩ��(DPL)Ϊ0���ж���������,Ȩ��Ϊ�ں�̬Ȩ��;��ucore��Ӧ�ó�������Ȩ��3,��Ҫ���á�int 0x80��ָ�����(���ַ�ʽ��Ϊ���ж�,�����ж�,Tra�ж�,��lab5������)������ϵͳ��������,��Ҫ��ʵ�ִ���Ȩ��3����Ȩ��0��ת��,����ϵͳ�����ж�(T_SYSCALL)����Ӧ���ж����������е���Ȩ��(DPL)��Ҫ����Ϊ3��
Ҫ���������2������3 �������غ���ʵ��,�ύ�Ľ����Դ�����(���Ա���ִ��),����ʵ�鱨���м�Ҫ˵��ʵ�ֹ���,��д��������1�Ļش����������2��3Ҫ��IJ��ִ����,��������ϵͳ,���Կ�����Լÿ1������һ�Ρ�100 ticks��,�����µļ�Ҳ������Ļ����ʾ��
��ʾ:���Ķ�С�ڡ��ж����쳣����
����
1.�ж���������(Ҳ�ɼ��Ϊ����ģʽ�µ��ж�������)��һ������ռ�����ֽ�?�����ļ�λ�����жϴ�����������?
����ϵͳ��Ҫ�Լ����ϵͳ�еĸ���������й���,�����ҪCPU�������ܹ��ͨ�Ų��С�һ��������ٶ�Զ����CPU���ٶȡ�����ò���ϵͳͨ��CPU���������ġ�������¼�,������ͨ������ѯ(polling)����,��̫�˷�CPU��Դ�ˡ�������Ҫ����ϵͳ��CPU�ܹ�һ���ṩij�ֻ���,����������Ҫ����ϵͳ������������¼���ʱ��,�ܹ�������֪ͨ������ϵͳ,����ϲ���ϵͳ��Ӧ�õ�����ִ��,�ò���ϵͳ����������ش���,Ȼ���ڻָ�����ϵͳ��Ӧ�õ�����ִ�С��ڲ���ϵͳ��,���ֻ��Ƴ�Ϊ�жϻ��ơ�
��Ҫ���ж��������ⲿ�ж�(�ж�)���ڲ��ж�(�쳣)�����ж�(���塢ϵͳ����)��
�ⲿ�ж�:����cpu���������ͨ��,��������Ҫ��������ʱ������cpu�����ж�����
�ڲ��ж�:cpuִ���ڼ����������Ƿ�����(����������ַ����Խ��)ʱ�������ڲ��жϡ�
ϵͳ����:���ڳ���ʹ��ϵͳ���÷���
���жϷ���ʱ,cpu��õ�һ���ж�������,��ΪIDT(�ж���������)������,IDT����ʼ��ַ��IDTR�Ĵ����洢,cpu���IDT�����ҵ����ж���������Ӧ���жϷ��������ڵ�ַ,��ת���жϴ�������ִ��,�����浱ǰ�ֳ�;���жϳ���ִ�����,�ָ��ֳ�,��ת��ԭ�жϵ㴦����ִ�С���IDT�ı���Ϊ�ж�������,��Ҫ�������ж��š������š�������,���ʽ����:
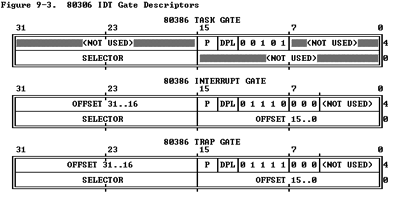
�ж�����������������������������һ����,�������ж����������ĸ�ʽ������չʾ:

�ж���������ΪIDT�ı���,ÿ������ռ��8�ֽ�(64λ),���ж�ѡ���Ӻ�ƫ�Ƶ�ַ���������жϴ���������ڵ�ַ,��0��31λ,47��63λ�����жϴ����������ڡ�����������,��ͨ��ѡ���Ӳ���GDT��Ӧ��������,�õ��ô���εĻ�ַ,��ַ����ƫ�Ƶ�ַΪ�жϴ���������ڵ�ַ��
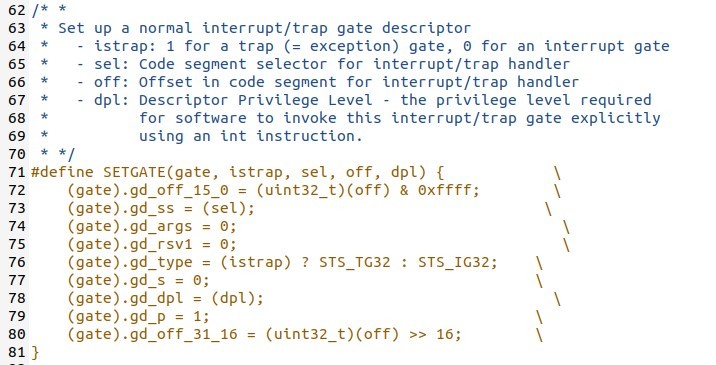
��mmu.h�ж��ж��������Ķ���Ҳ��֤�����Ͻ���:

2.��������kern/trap/trap.c�ж��ж����������г�ʼ���ĺ���idt_init����idt_init������,���ζ������ж���ڽ��г�ʼ����ʹ��mmu.h�е�SETGATE��,���idt�������ݡ�ÿ���жϵ������tools/vectors.c����,ʹ��trap.c��������vectors���鼴�ɡ�
����ÿ���жϵ������tools/vectors.c����,��kern/trap/vectors.S����tools/vector.c�ڱ���ucore�ڼ䶯̬���ɵ�,����256���жϷ������̵���ڵ�ַ�͵�һ����������ʵ��:
# handler
.text
.globl __alltraps
.globl vector0
vector0:
pushl $0
pushl $0
jmp __alltraps
.globl vector1
vector1:
pushl $0
pushl $1
jmp __alltraps
...
# vector table
.data
.globl __vectors
__vectors:
.long vector0
.long vector1
.long vector2
...
__vectors�洢�˸��жϴ���������ڵ�ַ,ÿһ���жϴ����������ν������롢�ж�������ѹջ(һЩ��cpu�Զ�ѹ��������ֻѹ���ж�������),�ٵ���trapentry.S�е�__alltraps���д�����
�����ж���������ʽʹ��SETGATE�꺯����IDT���г�ʼ����,��������ȫ����Ϊ�ж���(istrapΪ0),�жϴ�����������ں�ִ̬��,��˴����Ϊ�ں˵Ĵ����,DPLӦΪ�ں�̬��0��
SETGATE�꺯��:
idt_init����:
/* idt_init - initialize IDT to each of the entry points in kern/trap/vectors.S */
void
idt_init(void) {
/* LAB1 : STEP 2 */
/* (1) Where are the entry addrs of each Interrupt Service Routine (ISR)?
* All ISR's entry addrs are stored in __vectors. where is uintptr_t __vectors[] ?
* __vectors[] is in kern/trap/vector.S which is produced by tools/vector.c
* (try "make" command in lab1, then you will find vector.S in kern/trap DIR)
* You can use "extern uintptr_t __vectors[];" to define this extern variable which will be used later.
* (2) Now you should setup the entries of ISR in Interrupt Description Table (IDT).
* Can you see idt[256] in this file? Yes, it's IDT! you can use SETGATE macro to setup each item of IDT
* (3) After setup the contents of IDT, you will let CPU know where is the IDT by using 'lidt' instruction.
* You don't know the meaning of this instruction? just google it! and check the libs/x86.h to know more.
* Notice: the argument of lidt is idt_pd. try to find it!
*/
extern uintptr_t __vectors[];
//������һ���ļ��е�__vectors
for (int i = 0; i < 256; i++)
SETGATE(idt[i], 0, GD_KTEXT, __vectors[i], DPL_KERNEL);
//��IDT�н����ж�������,���д洢���жϴ������̵Ĵ����GD_KTEXT��ƫ����__vectors[i],��Ȩ��ΪDPL_KERNEL������ͨ����ѯidt[i]�Ϳɶ�λ���жϷ������̵���ʼ��ַ��
SETGATE(idt[T_SYSCALL], 0, GD_KTEXT, __vectors[T_SYSCALL], DPL_USER);
//Ϊϵͳ�����ж������û�̬Ȩ��(DPL3)
lidt(&idt_pd);
//����LDT,����LDT����LDTR
}
3.��������trap.c�е��жϴ�������trap,�ڶ�ʱ���жϽ��д����IJ�����дtrap�����д���ʱ���жϵIJ���,ʹ����ϵͳÿ����100��ʱ���жϺ�,����print_ticks�ӳ���,����Ļ�ϴ�ӡһ�����֡�100 ticks����
�Ȳ鿴trap����:

����ע�Ϳ����˽,trap�����Ƕ��жϽ��д����Ĺ���,���е��ж��ھ����ж���ں���__alltrapsԤ������ (������ trapasm.S��) ,������ת������ڴ���������,���ݲ�ͬ���ж�����,������Ӧ�Ĵ���������Ӧ�Ĵ������̽����Ժ�,trap���᷵��,���жϵij����������С�������ϳ���ᱣ��trapframe(ջ֡)�С�
Struct trapframe
{
uint edi;
uint esi;
uint ebp;
...
ushort es;
ushort padding1;
ushort ds;
ushort padding2;
uint trapno;
uint err;
uint eip;
...
}
��__alltrapsΪ���жϴ��������ǰ�ô���,���ڼ�����ջ�����trapframe�ṹ,����ѹ��ds��es��fs��gs��ͨ�üĴ���,�������ݶ��л�Ϊ�ں����ݶ�(�������IDT��ʼ������������Ϊ�ں˴����),���ѹ��trapframe�ṹ��ָ����Ϊtrap�����IJ���,�ٵ���trap������ɾ�����жϴ���,��������:
# vectors.S sends all traps here.
.text
.globl __alltraps
__alltraps:
# push registers to build a trap frame
# therefore make the stack look like a struct trapframe
pushl %ds
pushl %es
pushl %fs
pushl %gs
pushal
# load GD_KDATA into %ds and %es to set up data segments for kernel
movl $GD_KDATA, %eax
movw %ax, %ds
movw %ax, %es
# push %esp to pass a pointer to the trapframe as an argument to trap()
pushl %esp
# call trap(tf), where tf=%esp
call trap
# pop the pushed stack pointer
popl %esp
# return falls through to trapret...
Ȼ��trap_dispatch��������trapframe��ȡ�жϺ�ȥ������Ӧ�ж�,����ʱ���жϵĴ�������:
/* trap_dispatch - dispatch based on what type of trap occurred */
static void
trap_dispatch(struct trapframe *tf) {
char c;
switch (tf->tf_trapno) {
case IRQ_OFFSET + IRQ_TIMER:
/* LAB1 : STEP 3 */
/* handle the timer interrupt */
/* (1) After a timer interrupt, you should record this event using a global variable (increase it), such as ticks in kern/driver/clock.c
* (2) Every TICK_NUM cycle, you can print some info using a funciton, such as print_ticks().
* (3) Too Simple? Yes, I think so!
*/
ticks++;
if (ticks % TICK_NUM == 0) {
print_ticks();
}
break;
case IRQ_OFFSET + IRQ_COM1:
c = cons_getc();
cprintf("serial [%03d] %c\n", c, c);
break;
case IRQ_OFFSET + IRQ_KBD:
c = cons_getc();
cprintf("kbd [%03d] %c\n", c, c);
break;
//LAB1 CHALLENGE 1 : YOUR CODE you should modify below codes.
case T_SWITCH_TOU:
case T_SWITCH_TOK:
panic("T_SWITCH_** ??\n");
break;
case IRQ_OFFSET + IRQ_IDE1:
case IRQ_OFFSET + IRQ_IDE2:
/* do nothing */
break;
default:
// in kernel, it must be a mistake
if ((tf->tf_cs & 3) == 0) {
print_trapframe(tf);
panic("unexpected trap in kernel.\n");
}
}
}
��������

ʵ���ջ�
ͨ������ʵ��,����˽���һ��������IJ���ϵͳ�ӻ�������������ϵͳ���еĹ��̡���CPU�ӵ��,BIOS���л���IO��ʼ�����������ع��ܡ���BIOS��ɹ�����,�ѿ���Ȩ�ƽ���BootLoader,��ʱCPU����ʵģʽ,����л�������ģʽ��ȡ������ELFִ���ļ���ʽ��ucore����ϵͳ���ڴ�,�㽫����Ȩ�ƽ���ucore����ϵͳ,��ʱucore�ͽӹ�����������Ȩ����ucore�Ĺ�������ɻ������ڴ�����������жϹ�������������л��漰������ģʽ�ͷֶλ���,��ַ�ռ�,Ӳ�̷���,ELF�ļ�,������ջ,�жϵ����֪ʶ,�����۵�ʵ�������˽�����Щ֪ʶ��

