STM32F103УР1ёцCANҝШЦЖЖч,ҝЙТФЕдәПВЯјӯ·ЦОцТЗАҙІвКФCANәНPCөДНЁРЕЎЈФЪҙЛЦ®З°ПИС§П°Т»ПВCANөД»щҙЎЦӘК¶ЎЈ
CAN ҝШЦЖЖчёщҫЭБҪёщПЯЙПөДөзО»ІоАҙЕР¶ПЧЬПЯөзЖҪЎЈЧЬПЯөзЖҪ·ЦОӘПФРФөзЖҪ(0),CAN_HәН CAN_LЦ®ІоОӘ 2.5VЧуУТ;ТюРФөзЖҪ(1),¶юХЯұШҫУЖдТ»ЎЈ¶шТюРФөзЖҪ¶ФУҰВЯјӯ 1 CAN_HәН CAN_LЦ®ІоОӘ 0VЎЈ·ўЛН·ҪНЁ№эК№ЧЬПЯөзЖҪ·ўЙъұд»Ҝ,Ҫ«ПыПў·ўЛНёшҪУКХ·ҪЎЈФЪЧЬПЯЙППФРФөзЖҪҫЯУРУЕПИИЁ,Ц»ТӘУРТ»ёцөҘФӘКдіцПФРФөзЖҪ,ЧЬПЯЙПјҙОӘПФРФөзЖҪЎЈ¶шТюРОөзЖҪФтҫЯУР°ьИЭТвО¶,Ц»УРЛщУРөДөҘФӘ¶јКдіцТюРФөзЖҪ,ЧЬПЯЙПІЕОӘТюРФөзЖҪ(ПФРФөзЖҪұИТюРФөзЖҪёьЗҝ)
ХвАпТӘЧўТв,әНіЈ№жАнҪвІ»Н¬,ПФРФөзЖҪОӘ0ЎЈ
»№УРТ»өг,CANЧЬПЯөДЖрЦ№¶Л¶јУРТ»ёц120Е·өДЖҘЕдөзЧи
іэБЛХэіЈ№ӨЧчДЈКҪНв,»№УР3ЦЦІвКФДЈКҪ:
- ҫІД¬ДЈКҪ(ҪУКХЧФјә·ўіцИҘөДКэҫЭәНЧЬПЯКэҫЭ,І»·ўЛН)
- »·»ШДЈКҪ(·ўЛНКэҫЭөҪЧЬПЯ,ө«І»ҪУКХЧЬПЯКэҫЭ,Ц»ҪУКХЧФјәTxөҪЧЬПЯөДДЗ·ЭКэҫЭ)
- »·»ШҫІД¬ДЈКҪ(І»·ўЛНКэҫЭөҪЧЬПЯ,І»ҪУКХЧЬПЯКэҫЭ,ҪцҪУКХЧФјәTxөДКэҫЭ)
ХвАп»№УРёцәЬЦШТӘөДЦӘК¶өг,ҫНКЗCANЧЬПЯөДІЁМШВК,јЖЛг·ҪКҪұИҪПёҙФУ,ҪбәПCubeMXЙПөДCANЙиЦГАҙҝҙ
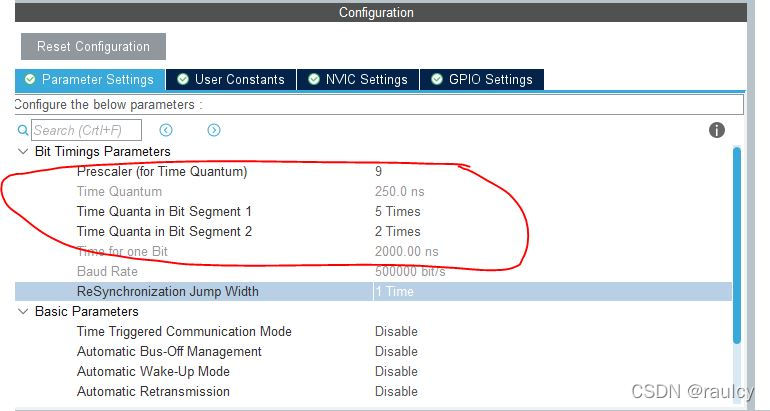
УР4ёцІОКэәНІЁМШВКУР№Ш,Prescaler,TQBS1,TQBS2әНSJW
APB1өДЖөВККЗ36MHz,·ЦЖөПөКэИЎ9өД»°,ФтТ»ёцTQОӘ1(36/9) =250ns,Ц®әу*(TQBS1+TQBS2+SJW),ФтCANөДО»КұјдОӘ2000ns,ПаУҰөДО»ІЁМШВКОӘ500Kbps(јЗЧЎХвёцЦө,әуГжәЬЦШТӘ)
- Generate codeЦ®әу,ОТГЗКЧПИІвКФ·ўЛН№ҰДЬЎЈ
CANөД·ўЛНұИҪПјтөҘ,К№УГөДКЗHAL_CAN_Start()әНHAL_CAN_AddTxMessage()ХвБҪёц·Ҫ·ЁЎЈ»№ТӘАыУГCAN_TxHeaderTypeDefХвёцҪб№№МеЎЈ
CAN_TxHeaderTypeDef TxHeader;
uint8_t TxData[8]={0x10, 0x20, 0x30, 0x40, 0x54, 0x65, 0x66, 0x99}; //ІвКФ·ўЛНХв8ёцЧЦҪЪ
uint32_t TxMailbox = 0;
TxHeader.StdId = 0x198;
TxHeader.ExtId = 0x999;
TxHeader.IDE = 0;
TxHeader.RTR = 0;
TxHeader.DLC = 8;
И»әуФЪҪшИлwhile(1)Сӯ»·З°,ҝӘЖфCANНЁөА
HAL_CAN_Start(&hcan); //F103ZETЦ»УРТ»ёцCAN,ЛщТФОЮРиРҙРтәЕ
whileСӯ»·ЦРјУИлПВБРҙъВл
HAL_GPIO_TogglePin(LED1_GPIO_Port,LED1_Pin); //LED1ЙБЛёұнКҫіМРтФЪХэіЈФЛРР
HAL_Delay(500);
HAL_CAN_AddTxMessage(&hcan, &TxHeader, TxData, &TxMailbox);
ұаТлЙХРҙәу,Ҫ«SaleaeөДUSB Logic AnalyzerөДCH0Б¬өҪҝӘ·ў°еөДCANL,ІўҪ«·ЦОцТЗөДөШПЯәНҝӘ·ў°еөДДіёцGNDПаБ¬,З§НтІ»ДЬНьөДКЗЙиЦГІЁМШВКОӘ500Kbit/sЎЈөг»чИнјюөДStartәу,ҝЙТФҝҙөҪІ¶»сөДІЁРО
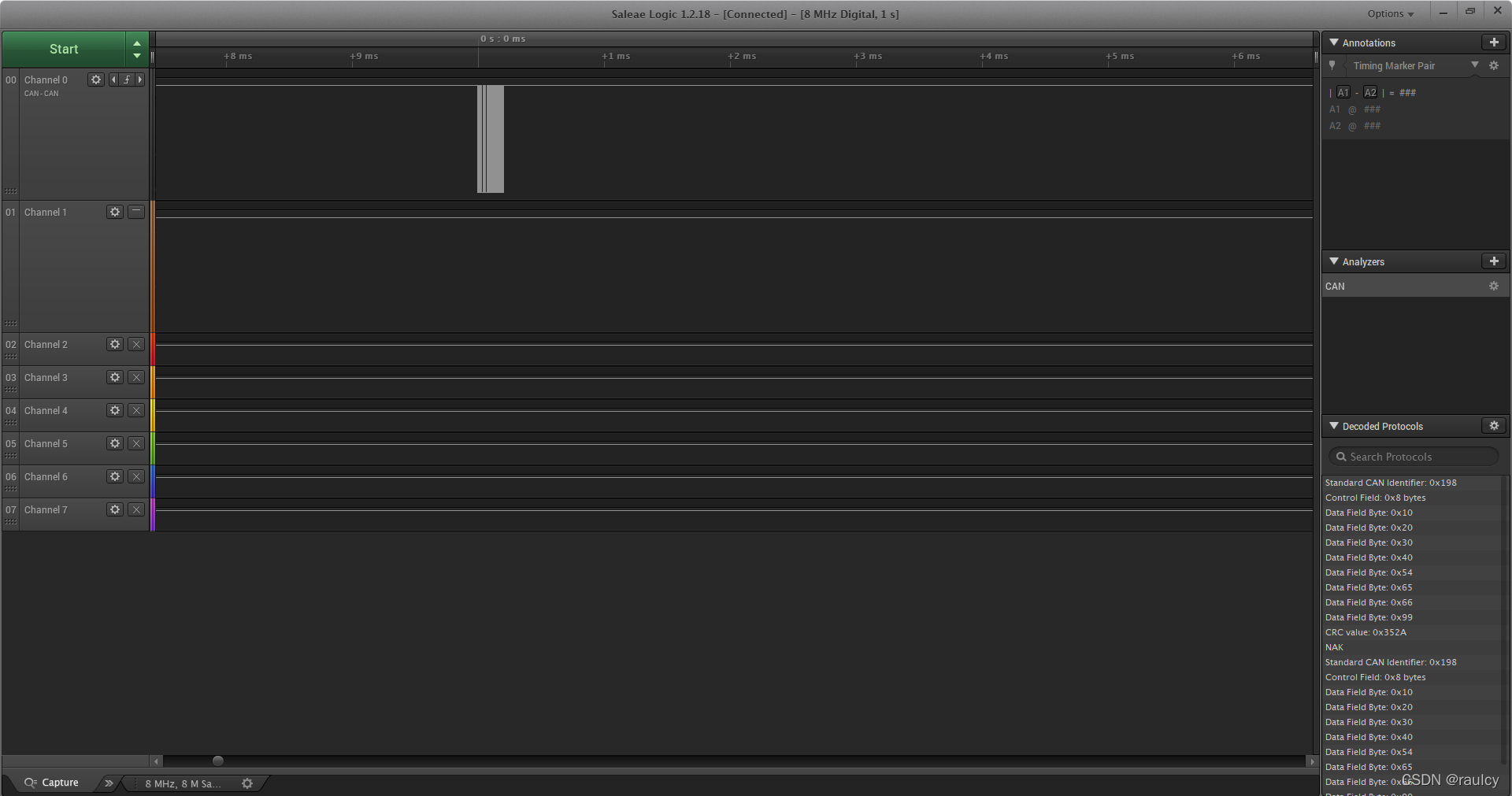
·ЕҙуУТПВҪЗАҙҝҙ
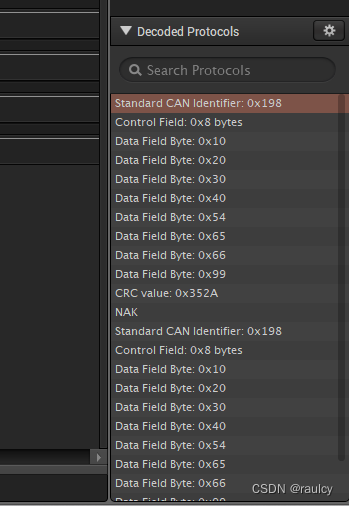
ҫНКЗОТГЗ·ўЛНөДКэҫЭТФј°CAN Identifier,ІвКФНЁ№э!
2. ҪУКХ№ҰДЬІвКФ
CANөДҪУКХұИ·ўЛНТӘёҙФУ,CANЧЬПЯРӯТйКЗУРУКПд»ъЦЖөД,ҫНКЗКХөҪөДұЁОДКЗРиТӘ·ЕөҪУКПдАп,РиТӘЕдЦГ№эВЛЖч(Filter),№ШУЪ№эВЛЖчөДЕдЦГ,ҝЙТФФЪ
stm32f1xx_hal_can.hЦРХТөҪCAN_FilterTypeDefҪб№№МеөДёчёціЙФұ¶ЁТе,Т»°г»бФЪcan.cЦРКЦ¶ҜҪ«ХвёцҪб№№МеөДёчёціЙФұҪшРРіхКј»ҜЎЈ

CANҪУКХәҜКэК№УГHAL_CAN_GetRxMessage(&hcan, CAN_RX_FIFO0, &RxHeader, RxData),ҪУКХөҪөДКэҫЭҙжөҪRxDataЦРЎЈ
УЙУЪОТКЦН·ЙПЦ»УРТ»ҝйҝӘ·ў°е,ОЮ·ЁПтCANҪУКХЖч·ўЛНКэҫЭ,ЛщТФҪУКХІвКФОЮ·ЁЧц,ө«ҝЙТФК№УГІвКФДЈКҪ»Ш»·јҙloopbackАҙІвКФҪУКХ№ҰДЬ,јҙ·ўКэҫЭІ»ҪшИлЧЬПЯ,ЦұҪУҪУКХ»ШАҙЎЈ
3. »Ш»·ІвКФ
ФЪcan.cАпҪ«hcan.Init.Mode = CAN_MODE_NORMALёДОӘhcan.Init.Mode = CAN_MODE_LOOPBACK,јҙҪшИлБЛ»Ш»·ДЈКҪЎЈПл·ЁКЗНЁ№эҙ®ҝЪҪ«ЛН»ШИҘөДRxDataҙтУЎіцАҙ
Ҫ«№эВЛЖчіхКј»Ҝәу,РиТӘФЪФӯАҙөДmain.cҙъВлЦРМнјУҪУКХЖчҪб№№МеөДіхКј»Ҝ
CAN_RxHeaderTypeDef RxHeader;
uint8_t RxData[8];
RxHeader.StdId = 0x234;
RxHeader.ExtId = 0x234;
RxHeader.IDE = 0;
RxHeader.RTR = 0;
RxHeader.DLC = 8;
while(1)Сӯ»·ЦРФЪФӯАҙөДҙъВләујУИлТФПВ
HAL_CAN_GetRxMessage(&hcan, CAN_RX_FIFO0, &RxHeader, RxData);
printf("RX of the CAN data is: %02X %02X %02X %02X %02X %02X %02X %02X\r\n", RxData[0], RxData[1], RxData[2], RxData[3], RxData[4], RxData[5], RxData[6], RxData[7]);
ХвСщФЪ·ўЛНіцИҘТФәуВнЙПҫНДЬ»ШөҪRxDataЦР,ҙтҝӘҙ®ҝЪөчКФЦъКЦҝЙТФҝҙөҪ

ЦӨГч·ўЛНіцИҘөДКэҫЭ¶јҝЙТФНЁ№эҙ®ҝЪҙтУЎіцАҙ,ІвКФНЁ№эЎЈ
Н¬КұНЁ№эВЯјӯ·ЦОцТЗТІ»№КЗДЬҝҙөҪCANДЈҝйөД·ўЛНКэҫЭЎЈ

