�÷�������������Ȧ������,���ϲ��ִ��롣
����֪��ModbusΪ����Ϊ���ģʽ(�ߵ�ַ���ڵ�λ,�͵�ַ���ڸ�λ),�������������ǵ�ϰ��������IO���ݡ�����Ϊ���ö����Ȧ֡��

���������������Ͽ�modbusЭ����η��ͺͽ�����Э��֡�ġ�
��ͼ���ҵIJ��Լ�¼,���Կ������������ǵ�����3���ֽ�
��ѡ1:���͵ı���Tx:008108-01 0F 0B B8 00 10 02 03 00 43 68
��ѡ2:���͵ı���Tx:008116-01 0F 0B B8 00 10 02 03 C0 43 38 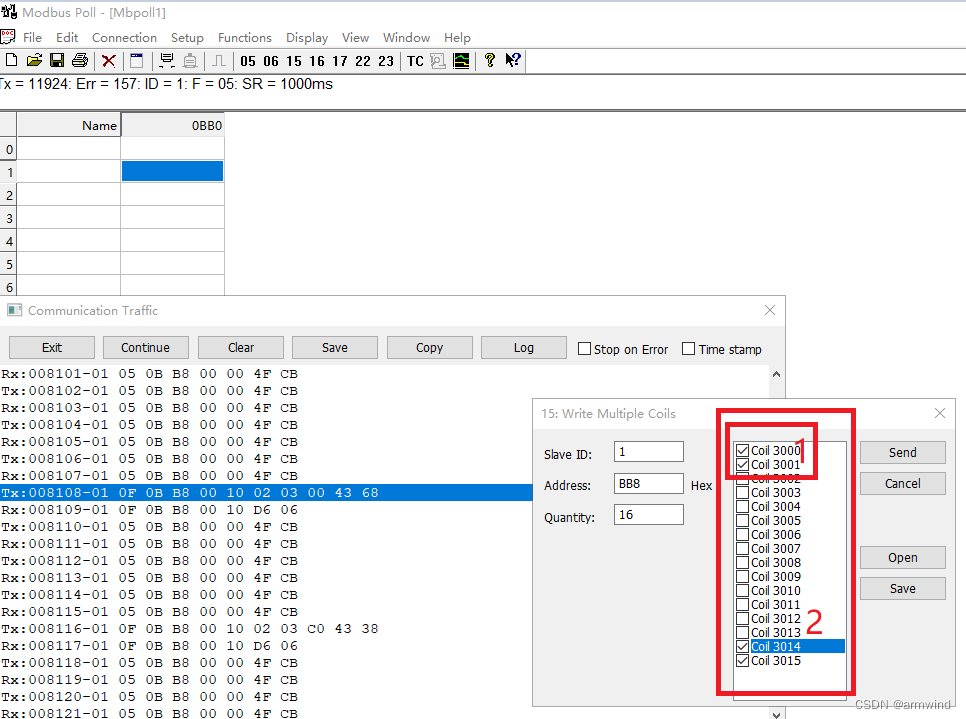
�������˽��� GD32��Ƭ���Ǵ�˻���С��ģʽ
{
uint16_t data= 0x1122;
uint8_t *usdat = (uint8_t*)&data;
LOGE("0x%x,%x",(uint8_t*)&usdat[0],usdat[0]);
LOGE("0x%x,%x",(uint8_t*)&usdat[1],usdat[1]);
}
��ӡ���:
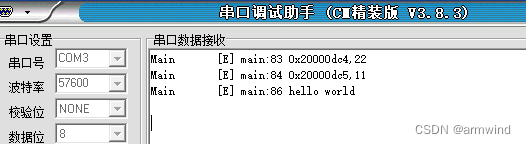
���Կ���,���GD32��Ƭ����˵,���ݵ�λ�����ڵ͵�ַ��,����С�ܵܡ��C>С�͵�ģʽ��
���������,Ŀǰ���Ȱ�3000��ʼ��2����Ȧ����,���Կ���Э�����ݲ�����03 00, ����modbus�Ǵ��ģʽ,��Ƭ����С��ģʽ,���λ��3000��3001�Ĵ�����Ӧ��״̬��0x03,����λ��2�������ˡ�
| 3000 | 3001 | ~~ | ~~ | 3015 |
|---|
eMBErrorCode
eMBRegCoilsCB(MBObj_t *pMbObj, UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNCoils, eMBRegisterMode eMode)
{
//return MB_ENOREG;
eMBErrorCode eStatus = MB_ENOERR;
short iNCoils = (short)usNCoils;
unsigned short usBitOffset;
//������Ҫ��MODBUS�ϲ����ѵ�ַ+1��,����I2C�Ķ���ַ(+1����),Ϊ������ѵ�ַ���л�ԭ
usAddress = usAddress -1;
LOGD("codi");
/* Check if we have registers mapped at this block. */
if ((usAddress >= REG_COILS_START) &&
(usAddress + usNCoils <= REG_COILS_START + REG_COILS_SIZE))
{
usBitOffset = (unsigned short)(usAddress - REG_COILS_START);
switch (eMode)
{
/* Read current values and pass to protocol stack. */
case MB_REG_READ:
while (iNCoils > 0)
{
*pucRegBuffer++ =
xMBUtilGetBits(ucRegCoilsBuf[pMbObj->portId], usBitOffset,
(unsigned char)(iNCoils >
8 ? 8 :
iNCoils));
iNCoils -= 8;
usBitOffset += 8;
}
break;
/* Update current register values. */
case MB_REG_WRITE:
LOGD("ncoils:%d",iNCoils);
{
UCHAR *Psrc = ucRegCoilsBuf[pMbObj->portId];
while (iNCoils > 0)
{//����ط�Ϊ��Ȧд����
//�ص�˵�ľ�������,������������16��bit,
//usBitOffset:����Ȧ��ƫ�ơ�3000-3000 = 0��iNCoils =16.�������뿴������������ľ���ʵ��
xMBUtilSetBits(Psrc++, usBitOffset,
(unsigned char)(iNCoils > 8 ? 8 : iNCoils),
*pucRegBuffer++);
iNCoils -= 8;
}
{
//add by armwind
UCHAR *PpduBUf = NULL;
master_ops->pvGetPduBuffer(&PpduBUf);
if (MB_FUNC_WRITE_SINGLE_COIL == PpduBUf[MB_PDU_FUNC_OFF]) {
//�û��ص�����
} else if (MB_FUNC_WRITE_MULTIPLE_COILS == PpduBUf[MB_PDU_FUNC_OFF]) {
//�û��ص�����
}
}
}
break;
}
}
else
{
eStatus = MB_ENOREG;
}
return eStatus;
}
//ע������,����������Ȧ�Ĵ�������ַΪ3000,����bitoffsetΪ6,ucNBitsΪ3,ucValue=0x03,
//��3006��ʼ��3��bit
//ucByteBuf:�Ĵ�����ַ
//usBitOffset:�Ĵ���ƫ�Ƶ�ַ
//ucNBits:��Ȧ����
//��Ȧ״ֵ̬
void
xMBUtilSetBits( UCHAR * ucByteBuf, USHORT usBitOffset, UCHAR ucNBits,
UCHAR ucValue )
{
USHORT usWordBuf;
USHORT usMask;
USHORT usByteOffset;
USHORT usNPreBits;
USHORT usValue = ucValue;
assert( ucNBits <= 8 );
assert( ( size_t )BITS_UCHAR == sizeof( UCHAR ) * 8 );
/* Calculate byte offset for first byte containing the bit values starting
* at usBitOffset. ƫ�Ƶ�ַ����ɼ����ֽ�,����usByteOffset=0*/
usByteOffset = ( USHORT )( ( usBitOffset ) / BITS_UCHAR );
/* How many bits precede our bits to set. �������bit��,usNPreBits=6*/
usNPreBits = ( USHORT )( usBitOffset - usByteOffset * BITS_UCHAR );
/* Move bit field into position over bits to set */
usValue <<= usNPreBits; //0x03<<6,���ݶ�����
/* Prepare a mask for setting the new bits. ?*/
usMask = ( USHORT )( ( 1 << ( USHORT ) ucNBits ) - 1 );//��������bit����,1<<3-1,��0x07
usMask <<= usBitOffset - usByteOffset * BITS_UCHAR; //����bit����,��������Ӧ����������
/* copy bits into temporary storage. */
usWordBuf = ucByteBuf[usByteOffset]; //��ȡ�͵�ַ����
usWordBuf |= ucByteBuf[usByteOffset + 1] << BITS_UCHAR; //��ȡ��λ��ַ����
/* Zero out bit field bits and then or value bits into them. */
// ��һ���Ƚ�����������0,Ȼ�������ϸ��������
usWordBuf = ( USHORT )( ( usWordBuf & ( ~usMask ) ) | usValue );
/* move bits back into storage */
ucByteBuf[usByteOffset] = ( UCHAR )( usWordBuf & 0xFF );
ucByteBuf[usByteOffset + 1] = ( UCHAR )( usWordBuf >> BITS_UCHAR );
}
-
��ȡ����bit����

-
�����ݻ�����ָ��ƫ�ƵĴ�����

Ȼ�����������,��Ǻ����������,�ٰ�λ�ɽ����ݸ��½�ȥ

