一、项目
MilkTeaBrother是使用麦克纳姆移动方式的室内服务小车,动力系统为RoboMaster M2006,文中提到的相关文件可以在下方获取。
点击此处了解MilkTeaBrother相关信息
二、测试内容
测试在Ubuntu20.04环境下,在ROS中读取电机位置或速度反馈信息并控制电机,完成小车移动控制,通过PID控制算法,实现小车速度的闭环。
三、测试材料
① 优利德UNIT直流稳压电源UTP1310
UTP1310是经济型的直流稳压电源,具有过压保护、过流保护、过温保护、LED四位电压电流显示等功能。
了解UTP1310直流稳压电源相关信息
② RoboMaster M2006 P36直流无刷减速电机
了解M2006电机相关信息
M2006 P36电机采用三相永磁直流无刷结构,具有输出转速高、体积小、功率密度高的特点。M2006内置位置传感器,提供精确的位置反馈,以FOC矢量控制方式使电机产生连续的扭矩。减速箱减速比为36:1
电机的额定输入电压为24V,额定电流为3A
③ RoboMaster C610无刷电机调速器
了解C610电调相关信息
C610电调采用32位电机驱动定制芯片,使用磁场定向控制技术(FOC),实现对电机扭矩的精确控制,与M2006电机配合使用,可选用RoboMaster Assistant调参并升级固件
④ RoboMaster 电调中心板 2
了解RM2电调中心板相关信息
RoboMaster 电调中心板 2 是一款专为实现电源及 CAN Bus 通信接口扩展的转接板。中心板具有结构紧凑、接口集成度高等特性,可同时驱动 7 套动力系统;采用硅胶外壳设计提高了防护等级,保障产品可靠运行。
⑤ MakerbaseMKS CANable Pro V1.0 USB转CAN模块
CANable 是一款小型的、低成本的开源 USB 转 CAN 适配器。 CANable 在您的计算机上显示为虚拟串行端口,并充当 CAN 总线接口的串行线路。 使用可选的candlelight固件时,CANable 将作为 Linux 上的本机 CAN 接口被调用。
CANable Pro 是 CANable 的电隔离版本,具有增强的 ESD 保护和分离式固定孔。
了解CANable相关信息
了解Makerbase商家提供的测试案例
四、测试前准备
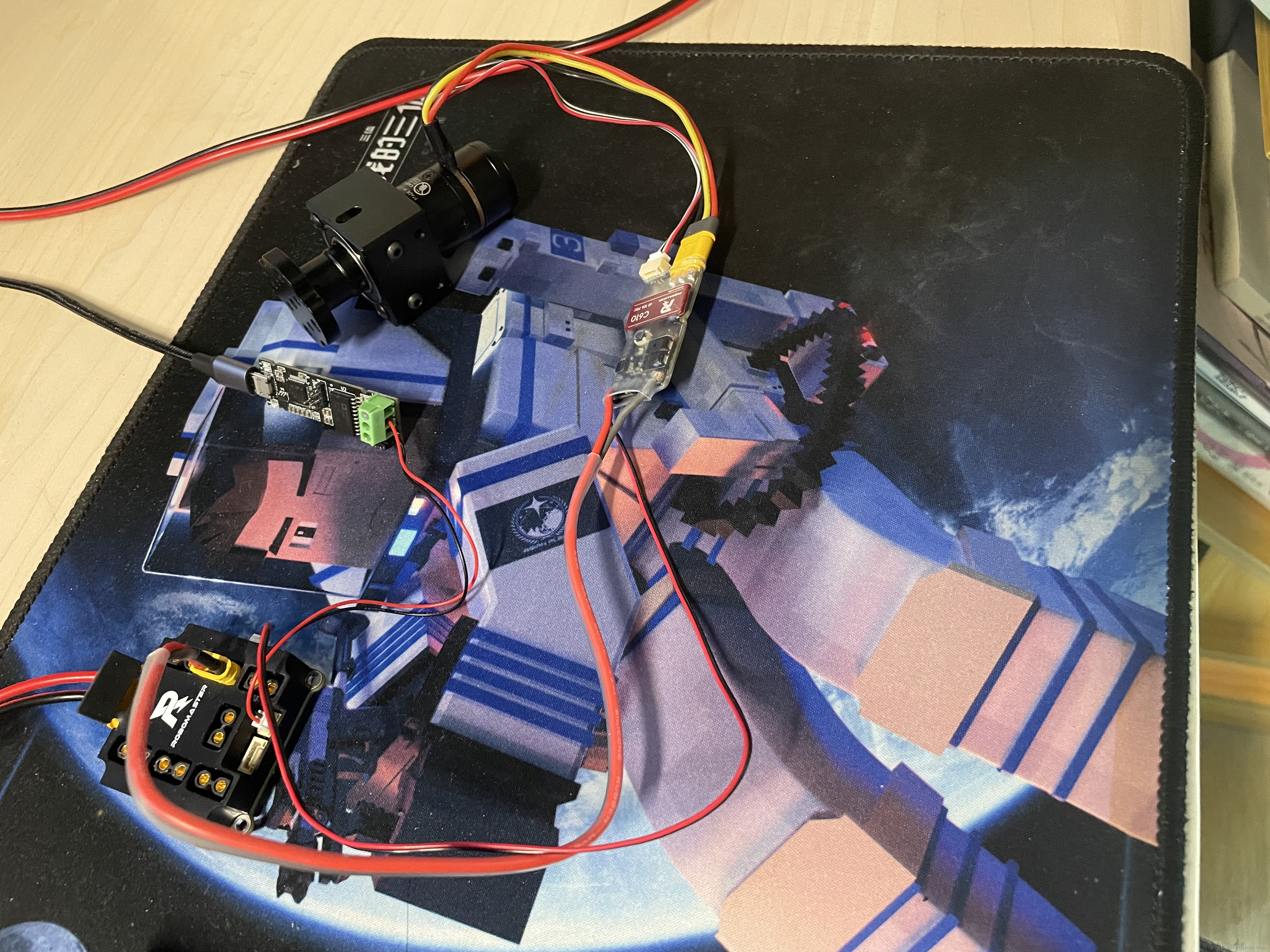
① 接线
开始测试前,需要首先将各部分接线如下:
1. 连接XT60电源线与中心板
RoboMaster Central Board 2额定输入电压为24V,额定输入电流为30A,电源输入接口为XT60
2. 连接中心板与XT30电源线
中心板上有七个XT30电源输出接口,额定电压为24V,额定输出电流为15A
3. 连接XT30电源线与C610电调
将XT30电源线正负两线,分别焊于电调的正负点位,对应焊接点在C610电调说明书中有具体描述。
C610电调额定电压为24V,最高支持10A的持续电流。
4. 连接中心板与CAN信号线
在中心板的顶部或侧面有多个2-Pin CAN总线接口,每个接口与板上其他CAN总线接口并联,用于CAN总线通讯。
5. 连接CAN信号线与C610电调
按照CAN信号线线序CAN_H、CAN_L,将CAN信号线焊接到C610电调背面对应端点,在说明书中有具体描述。
CAN总线比特率为1Mbps,M2006动力系统的CAN通信默认发送频率为1KHz
6. 连接C610电调与M2006电机的三相动力接头
连接时确保连线正确,在说明书中有具体说明。
7. 连接C610电调与M2006电机的4-Pin数据线
将M2006电机的4-Pin位置传感器数据线连接到C610电调对应端口上,在说明书中有具体描述。
最终接线情况应如下图所示:
② 接通电源并校准电机
1. 接通电源
待收到启动蜂鸣,电机与电调开始正常工作后,绿灯闪烁,此时可以开始校正电机。
2. 校正电机
校准过程中须保持空载,且不可触碰电机。
初次使用需校准电机,长按C610电调上的SET按键,直至指示灯变为绿灯高频闪烁,随后释放SET按键。此时电机将进入自动校准模式,校准完成后会自动退出校准模式。
五、测试
① 调试MakerbaseCANable USB转CAN模块
1. 获取CANable固件
可以从CANable官网下载固件。
也可查看文件夹中已经编译好的固件firmware.bin,或者是按照candlelight项目的编译步骤获取固件文件。
2. 烧录
使用STM32CubeProgrammer将固件烧录到板中。
下载STM32CubeProgrammer
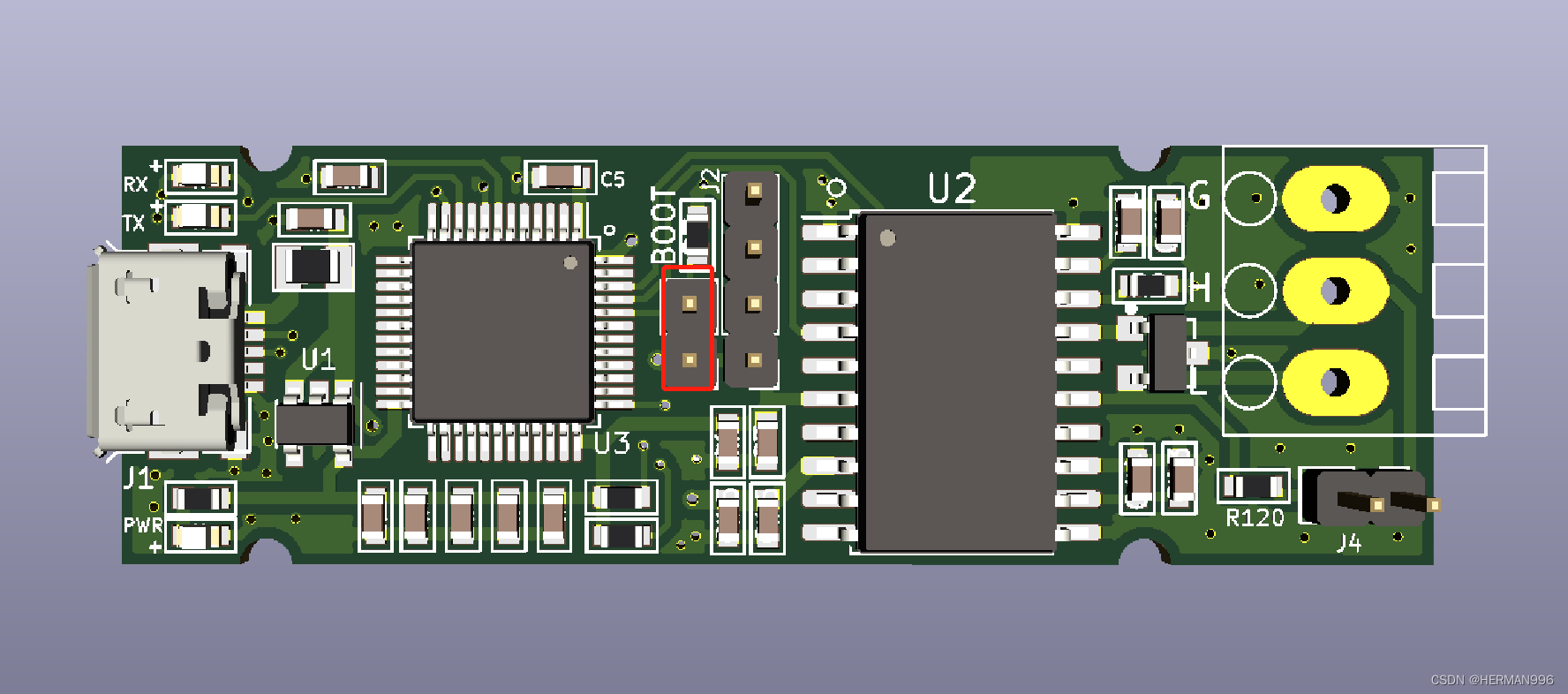
将板上的boot跳线连接,开启DFU (Device Firmware Upgrade) 烧录模式,boot位置即图上红框处。
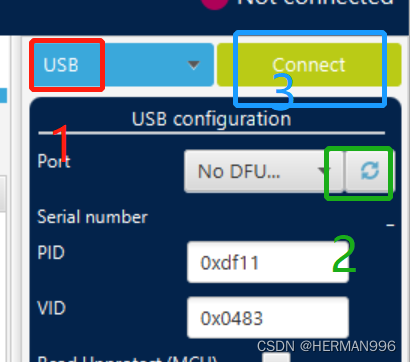
打开STM32CubeProgrammer,依次点击红绿蓝三个按钮,搜索可用的STM32设备。
随后按照图示顺序,加载本地的固件文件。
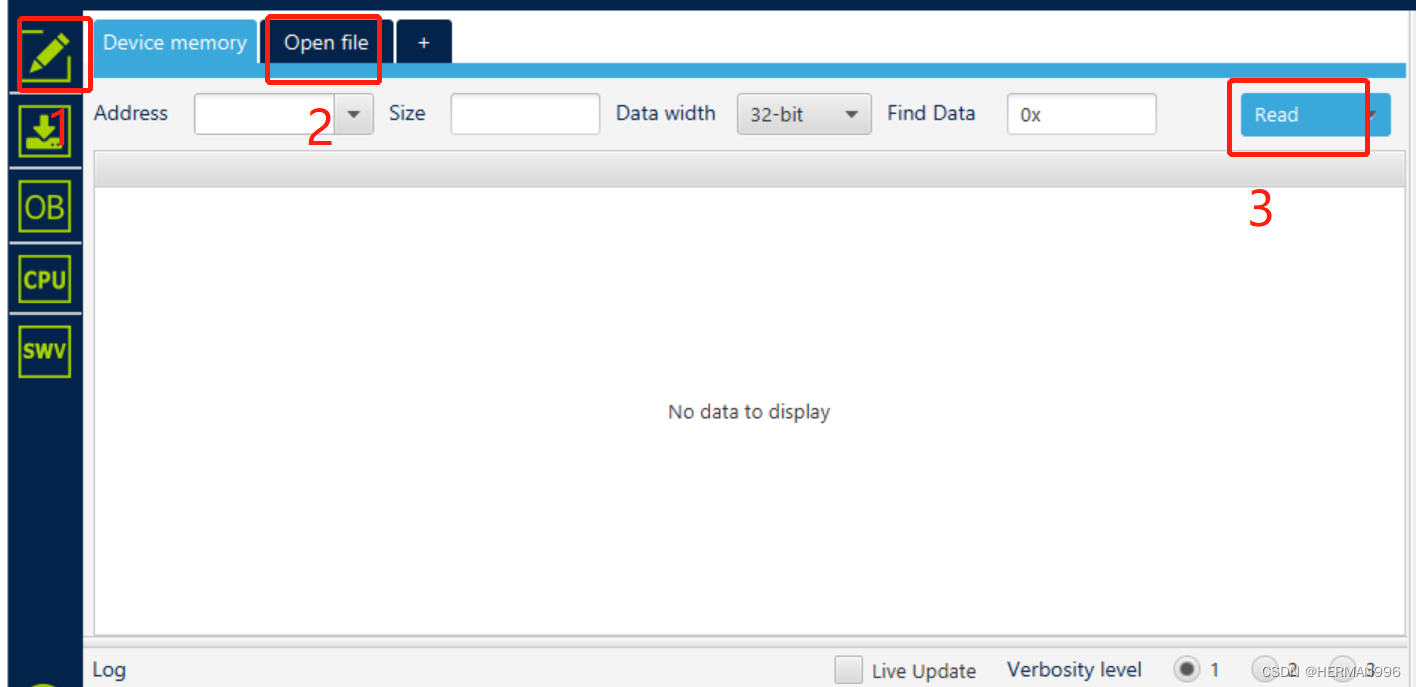
选择好本地的固件文件后,点击和上图中Read同位置的Download按钮,将固件文件载入板中。
当提示烧录成功后,断开跳线,准备开始下一步在Linux中进行测试。
② 在Linux中测试接收CAN总线信息
1. 安装测试软件包及其依赖
sudo apt-get install -y can-utils net-tools
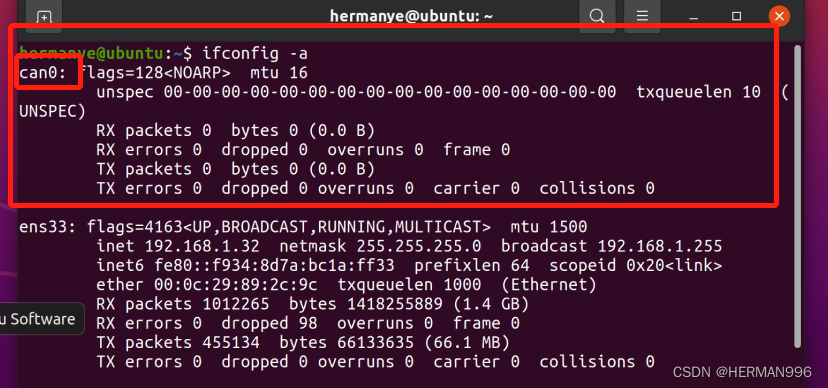
2. 查看CAN设备是否能被发现
can设备在Linux下在ifconfig中和其他设备一同管理,图中红框所示为测试要用的CAN设备。
ifconfig -a
3. 启用CAN设备
以CAN设备名为can0为例,比特率为1000000,启用该设备。
sudo ip link set can0 up type can bitrate 1000000
4. 监听CAN端口
监听Can0收到的信息。
candump can0
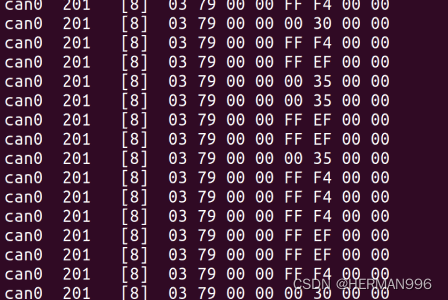
此时扭动电机,可以看到can0处收到的信息在不断变化,证明能接收到CAN总线信息,可以准备下一步测试,按照协议规则,读取CAN设备传达的具体信息。
③ CAN通讯
电调反馈
标识符0x200 当id为1时 标识符为0x201
[8] 8位 即 2八次方 256
data[0] 机械角度 以十六进制显示 FF时256
date[1]机械角度中的更小部分,以十六进制显示 转换后最高为十进制的256
data[2]转子转速
data[3]转子转速的更小部分
2的13次方为8192 转子机械角度为0~8191对应转子机械角度为0-360
rpm是RevolutionsPerMinute 转子速度
参考内容:https://blog.csdn.net/zengqz123/article/details/85682039?spm=1001.2014.3001.5502
要通过CAN总线收发电机的信息,首先要了解CAN本身,着重了解数据帧部分
了解CAN通讯数据帧相关内容
因为只涉及到应用CAN,因此对其底层的具体实现不需要全部掌握,使用python-can在Ubuntu中开发。
cantools
python-can 库为 Python 提供控制器区域网络支持,为不同的硬件设备提供通用抽象,以及一套用于在 CAN 总线上发送和接收消息的实用程序。
参考资料:
广东工业大学USB2CAN项目
CAN通讯
其他内容
RoboMaster Snail电机 应用于多旋翼飞行器
搭配RoboMaster C615电调
中心板2采用的是硅胶外壳,能否淘宝定做硅胶外壳给小车用
动力系统参数:
开发辅助工具:
RoboMaster Assistant
RoboMaster Assistant是辅助RoboMaster各类产品使用的软件工具。
该工具拥有对RM产品进行参数查询、参数设置、固件升级等功能。RoboMaster Assistant工具以下特点:
1、无须设置波特率和串口号,能够自动识别产品信息并进行连接,方便使用。
2、适用于多种串口设备
3、适用于多种RM的产品
4、一键远程固件升级
疑惑点:
电调 can终端电阻选择开关 on/nc位置 接入或断开120终端电阻,参阅can总线布线和终端电阻选择的相关规范,选择性接通
can信号线连接控制板,,can总线比特率为1mbps

