һ�� MSP430FR5994 eUSCI����
eUSCI ģ�����ڴ�������ͨ�š� eUSCI ģ��֧��ͬ��SPI(3 pin��4 pin)��I2C��ͨ��Э��,�Լ��첽ͨ��Э��,��UART�������Զ������ʼ�����ܵ���ǿ�� UART �� IrDA��
eUSCI_An ģ���ṩ�� SPI(3 ��� 4 ��)��UART����ǿ�� UART �� IrDA ��֧�֡�
eUSCI_Bn ģ���ṩ�� SPI(3 ��� 4 ��)�� I2C ��֧�֡�
���ݷ�װ�IJ�ͬ,MSP430FR5994����ʵ���ĸ� eUSCI_A ģ�������ĸ� eUSCI_B ģ�顣
���� MSP430FR5994��Ӳ��SPI
2.1 ����
- 7 λ�� 8 λ���ݳ���
- LSB-first �� MSB-first ���ݷ��ͺͽ���
- 3 �ߺ� 4 �� SPI ����
- ��ģʽ���ģʽ
- �����ķ��ͺͽ�����λ�Ĵ���
- �����ķ��ͺͽ��ջ���Ĵ���
- �������ͺͽ��ղ���
- ��ѡ���ʱ�Ӽ��Ժ���λ����
- ��ģʽ�µĿɱ��ʱ��Ƶ��
- ���պͷ��͵Ķ����ж�����
- LPM4 �µĴ�(slave)ģʽ����
2.2 MSP430FR5994 launchpad SPIʹ��
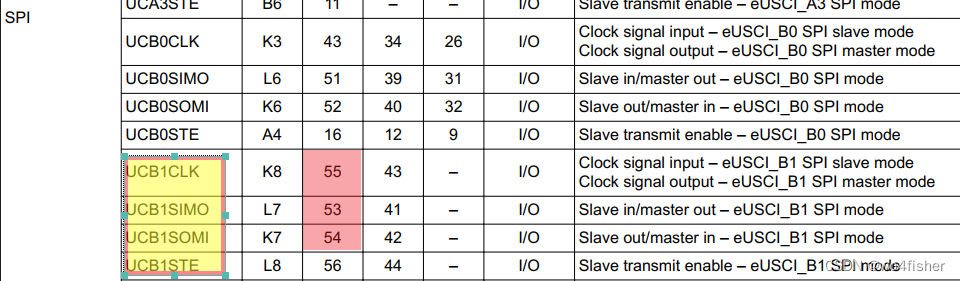
����(һ)����ʾ,MSP430FR5994Ӳ��SPI������eUSCI_Anģ���eUSCI_Bn��ʵ��,����ʵ��8·SPI��
�������launchpad���ŷֲ�,ѡ����ͼ�б�ע��SPI������������ΪӲ��SPI����ʹ�á�
// ʹ��eUSCI_B1����ģ��
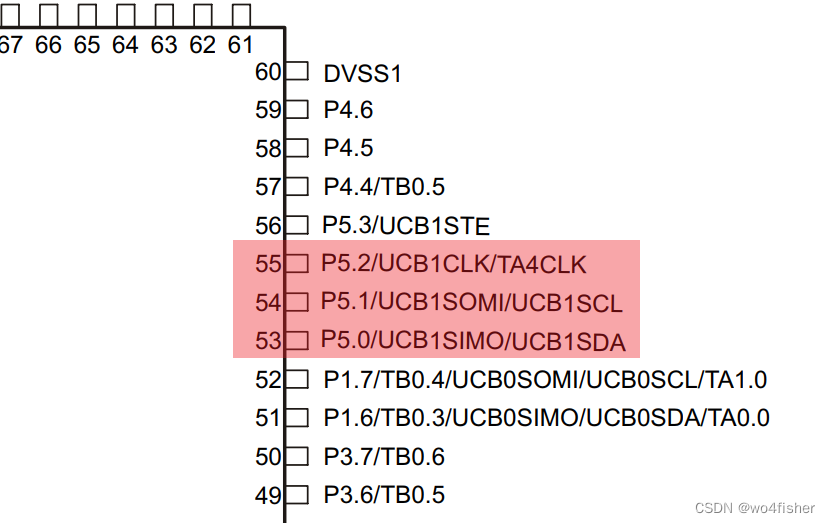
P5.0 --------SPI.MOSI
P5.1 --------SPI.MISO
P5.2 --------SPI.SCLK
P8.3 --------SPI.CS(gpioģ��)
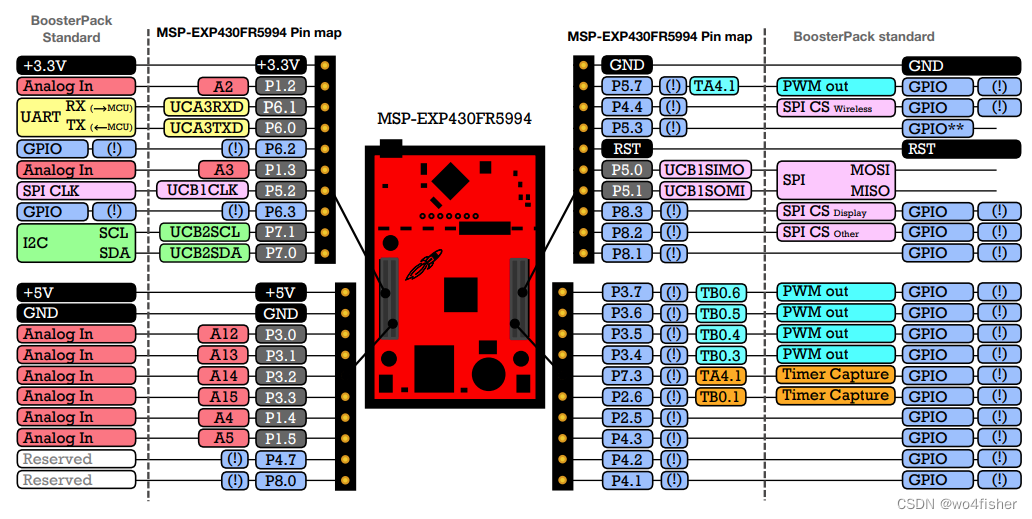
��ɫ����Ϊlaunchpad����5994оƬ������(����LQFP80��װ,����PN80)
����driverLib SPI API˵������ʼ��
3.1 ������
- EUSCI_B_SPI_changeClockPhasePolarity ʱ����λ�ͼ�������
- EUSCI_B_SPI_changeMasterClock ����ʱ�Ӽ�Ƶ��
- EUSCI_B_SPI_clearInterrupt ���жϱ�־
- EUSCI_B_SPI_disable ʧ��SPI����
- EUSCI_B_SPI_disableInterrupt ʧ���ж�
- EUSCI_B_SPI_enable ʹ��SPI
- EUSCI_B_SPI_enableInterrupt ʹ���ж�
- EUSCI_B_SPI_getInterruptStatus ��ȡ�жϱ�־
- EUSCI_B_SPI_getReceiveBufferAddress ��ȡ���ջ����ַ
- EUSCI_B_SPI_getTransmitBufferAddress ��ȡ���ͻ����ַ
- EUSCI_B_SPI_initMaster ��ʼ��SPIģ��,��SPI��Ϊmaster
- EUSCI_B_SPI_initSlave ��ʼ��SPIģ��,��SPI��Ϊslave
- EUSCI_B_SPI_isBusy �ж��Ƿ�busy
- EUSCI_B_SPI_receiveData ����һ���ֽ�����
- EUSCI_B_SPI_select4PinFunctionality ����Ϊ4��SPIģʽ
- EUSCI_B_SPI_transmitData ����һ���ֽ�����
3.2 SPI��ʼ������
eUSCI �� PUC �� UCSWRST ��
�� PUC ֮��,UCSWRST λ�Զ���λ,ʹ eUSCI �����ڸ�λ״̬�� ��λʱ,UCSWRST λ��λ UCRXIE��UCTXIE��UCRXIFG��UCOE �� UCFE λ,������ UCTXIFG ��־��
��� UCSWRST ���ͷ� eUSCI ���в�����
���ú��������� eUSCI ģ��ʱӦ�� UCSWRST ��λʱ,�Ա��ⲻ��Ԥ֪����Ϊ��
��λUCSWRSTλ,ʹ��SPIģ��;��λUCSWRSTλ,SPI������;UCSWRST��λʱ,����SPI��������(��ʼ��)
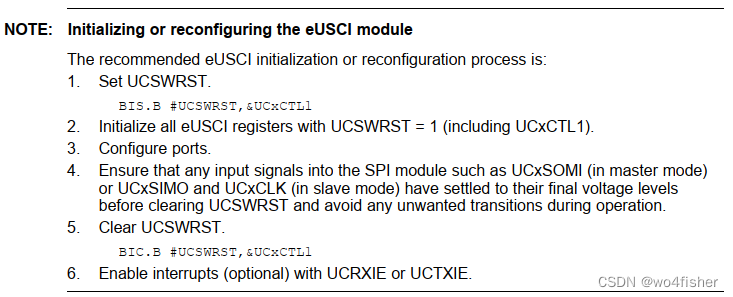
- 1) ��λUCSWRST;
- 2)��ʼ��SPI��ؼĴ���;
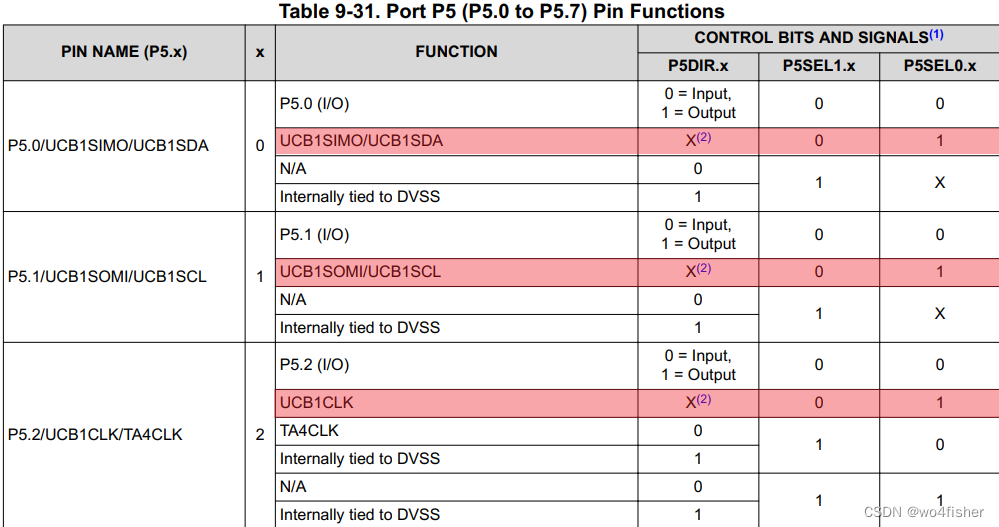
- 3)��ض˿ڳ�ʼ��;
- 4)Ϊ�˱��ⲻ��Ԥ֪�IJ���,ȷ��SCLK��MISO��MOSI���˿ڶ��ڡ����ա���ƽ;
- 5)��λUCSWRST(ʹ��SPI);
- 6)ʹ������ж�(�����Ҫ�Ļ�)��
UCSWRSTλ:

�ġ�����
4.1 SPI��ʼ��
void spi_init()
{
/*
* Select Port 8
* Set Pin 3 as output
* SPI_CS
*/
GPIO_setAsOutputPin(
GPIO_PORT_P8,
GPIO_PIN3
);
/*
* Select Port 8
* Set Pin 3 to output Low.
* SPI_CS
*/
GPIO_setOutputHighOnPin(
GPIO_PORT_P8,
GPIO_PIN3
);
/*
* Select Port 5
* Set Pin 0, 1, 2 to input Secondary Module Function, (UCB0TXD/UCB0SIMO, UCB0RXD/UCB0SOMI).
*/
GPIO_setAsPeripheralModuleFunctionInputPin(
GPIO_PORT_P5,
GPIO_PIN0 + GPIO_PIN1 + GPIO_PIN2,
GPIO_PRIMARY_MODULE_FUNCTION
);
//Initialize Master
EUSCI_B_SPI_initMasterParam param = {0};
param.selectClockSource = EUSCI_B_SPI_CLOCKSOURCE_SMCLK;
param.clockSourceFrequency = CS_getSMCLK();
param.desiredSpiClock = 500000;
param.msbFirst = EUSCI_B_SPI_MSB_FIRST;
param.clockPhase = EUSCI_B_SPI_PHASE_DATA_CHANGED_ONFIRST_CAPTURED_ON_NEXT;
param.clockPolarity = EUSCI_B_SPI_CLOCKPOLARITY_INACTIVITY_HIGH;
param.spiMode = EUSCI_B_SPI_3PIN;
EUSCI_B_SPI_initMaster(EUSCI_B1_BASE, ¶m);
//Enable SPI module
EUSCI_B_SPI_enable(EUSCI_B1_BASE);
}
4.2 SPI���ֽڷ���
void spi_put(uint8_t byte)
{
GPIO_setOutputLowOnPin(GPIO_PORT_P8,GPIO_PIN3);
EUSCI_B_SPI_transmitData(EUSCI_B1_BASE,byte);
while(EUSCI_B_SPI_isBusy(EUSCI_B1_BASE));
GPIO_setOutputHighOnPin(GPIO_PORT_P8,GPIO_PIN3);
}
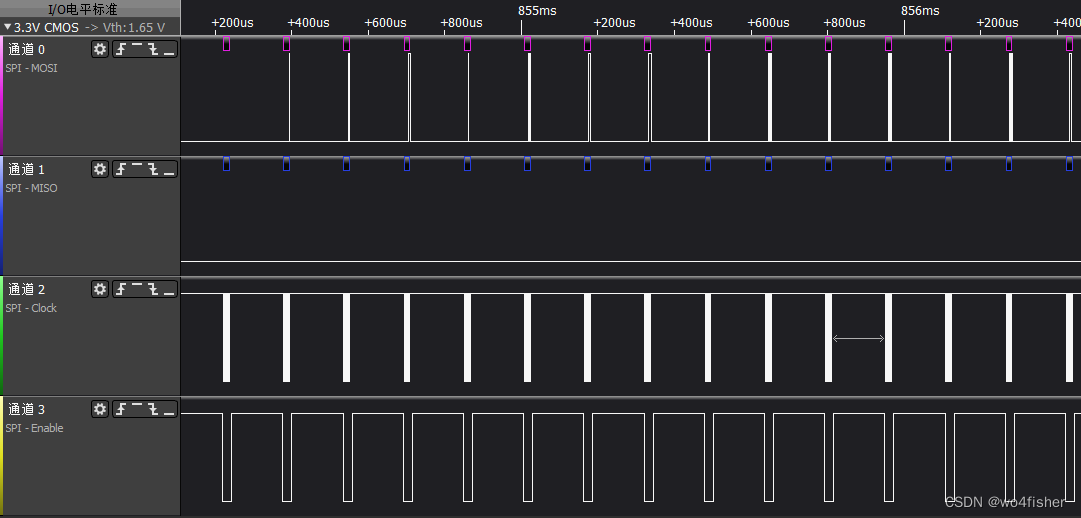
4.3 ���
���ֽڲ���ͼ
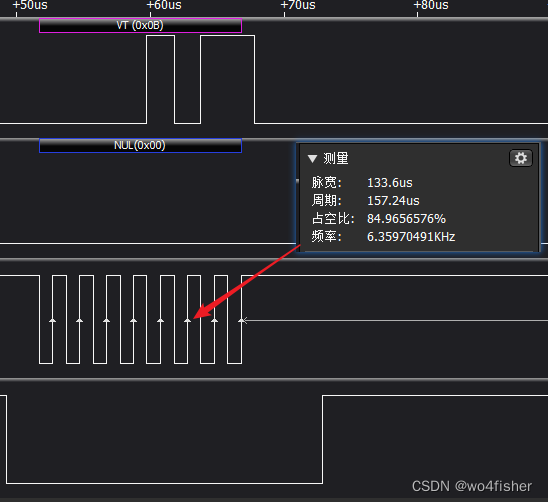
�������
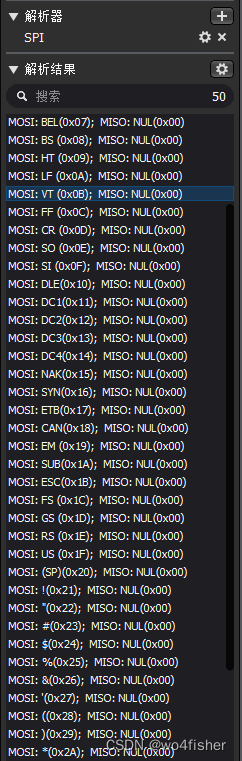
���ֽڷ��Ͳ���ͼ
�C(END)�C

