FPGAʵ���¼��:״̬��ר����ϰ
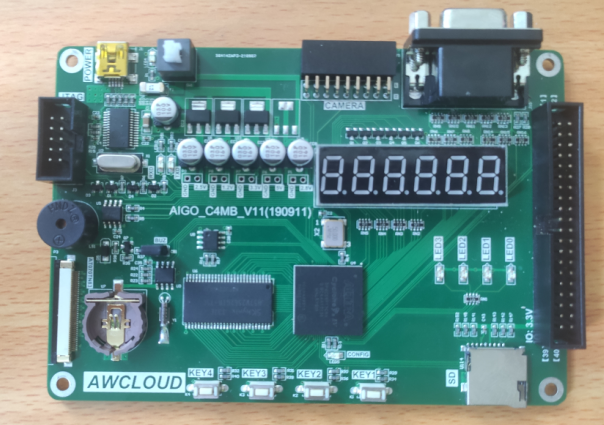
����:AWcloudC4 ������
IDE:QuartusII 18.1(Lite)
��������:Modelsim-Alterl
оƬϵ��:Cydone IV E
оƬ����:EP4CE6F17C8
оƬ����:EP4CE6
����Ŀ¼
ʵ��Ҫ��:
1��������������������verilog��дһ�δ���,����״̬����ʵ�ָù��ܡ�
(1)״̬��:ʵ��һ�����Թ���,�ù��̰���������״̬���������ԡ�ֹͣ���ԡ���ѯ���Խ������ʾ���Խ�������Խ������س�ʼ��6��״̬;��ʱ�������Ƹù���,90������ɸù���;
(2)����״̬��תʱ��;
(3)����ʵ�֡�
2. �������Լ��10010����״̬ͼ, ����verilog���ʵ��֮��
����״̬��
״̬��������״̬�Զ����ļ��,����ʵ�������й��������ɵ�һ����ѧģ�͡�
��������ʲô�ǡ�״̬��( State )����ʵ�������в�ͬ״̬��,����һ���Զ���,���� open �� closed ����״̬������ͨ����˵��״̬��������״̬��,Ҳ���DZ������������״̬������������,�����Զ��ŵ�״̬�������� open �� closed ��
״̬��,Ҳ���� State Machine ,����ָһ̨ʵ�ʻ���,����ָһ����ѧģ�͡�˵����,һ�����ָһ��״̬ת��ͼ������,�����Զ��ŵ����й���,���ǿ��Գ����������ôһ��ͼ��
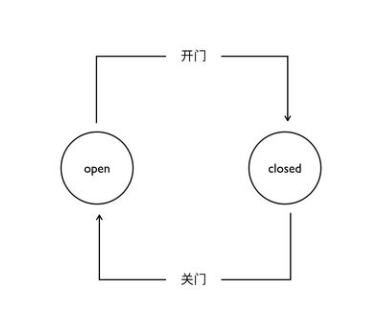
�Զ���������״̬,open �� closed ,closed ״̬��,�����ȡ�����ź�,��ô״̬�ͻ��л�Ϊ open ��open ״̬�������ȡ�����ź�,״̬�ͻ��л�Ϊ closed ��
״̬����ȫ��������״̬�Զ���,�Զ�������Ҳ�ǰ�����Ҫ����ġ�����һ��״̬��,ͬʱ�������ĵ�ǰ״̬�Լ�����,��ô���״̬ʱ������ȷ����������ġ���������Զ���,������ʼ״̬ closed ,�������롰���š�,��ô��һ��״̬ʱ������������ġ�
����״̬���Ļ����������Ǿͽ�������ˡ��ظ�һ��:״̬��������״̬�Զ����ļ��,����ʵ�������й��������ɵ�һ����ѧģ�͡�
һ���½�����
�������: ������Թ��̰���������״̬���������ԡ�ֹͣ���ԡ���ѯ���Խ������ʾ���Խ�������Խ������س�ʼ��6��״̬;��ʱ�������Ƹù���,90s����ɸù���;
1. �½���Ŀ
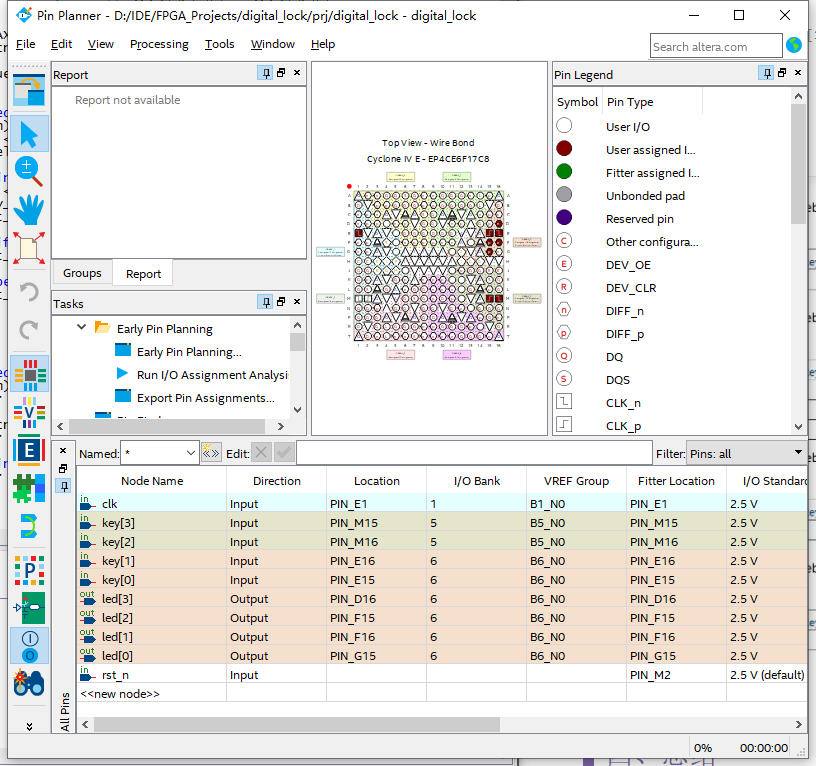
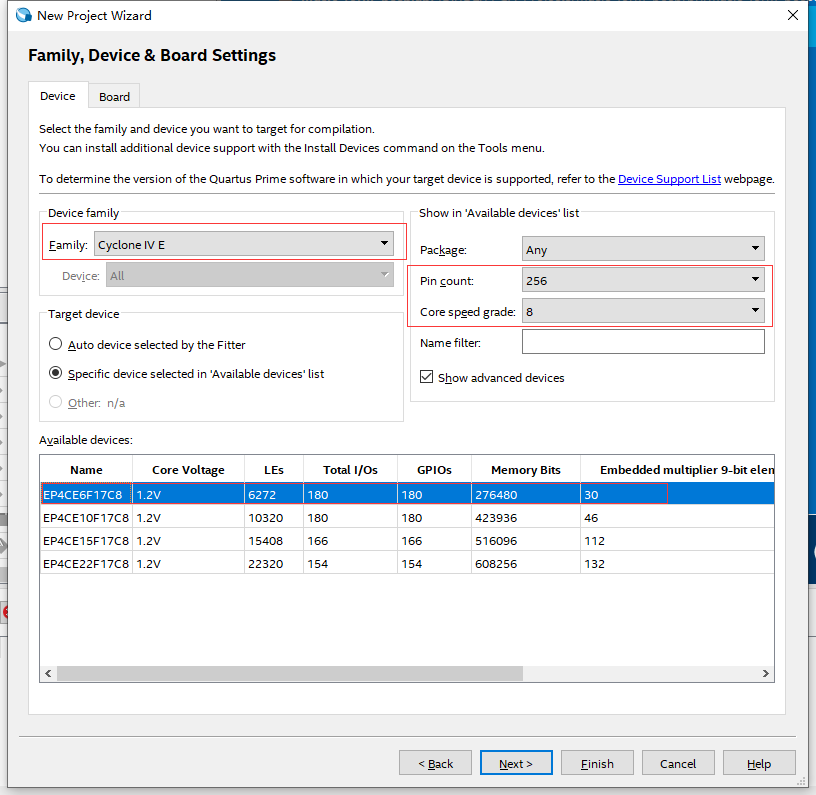
- �½�һ����Ϊstate_machine����Ŀ
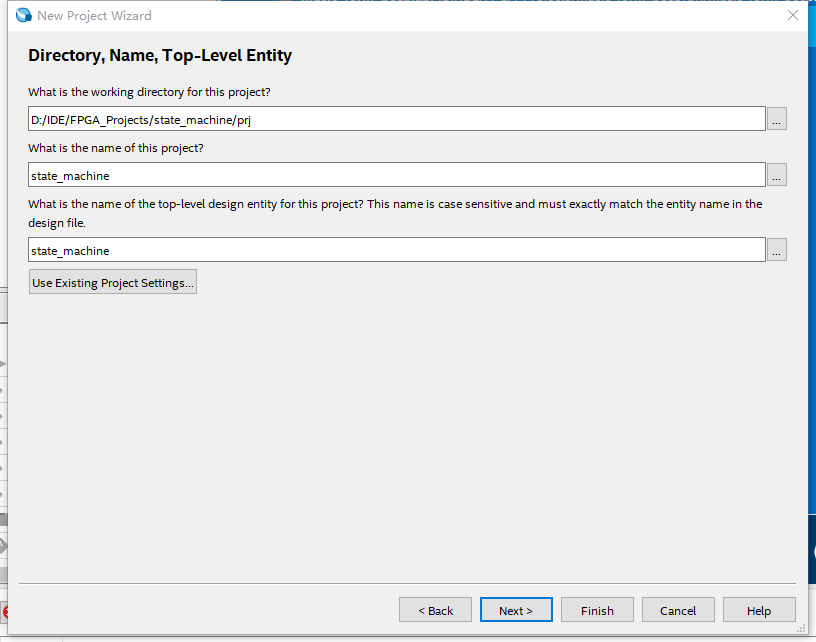
- ѡ��Cyclong IV Eϵ�е�оƬ,��������ѡ��256,
Core speed gradeѡ��8,оƬ����EP4CE6F17C8��оƬ,���next,����ѡ��ModelSim-Altera,Ȼ��finish��
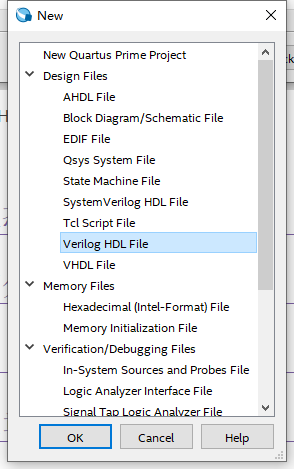
- �½�һ��Verilog HDL�ļ�
�������״̬��
1. ��Ƽ�ʱ��ģ��
AWcloudC4�������ʱ��Ƶ����50M/s,Ҫ����90s��ɰ���6��״̬������,����ƽ��ÿ��״̬��ʱ90/6=15s,��һ��״̬ʱ�ӻ���50M*15=750_000_000��
my_clock.v
//15s�����ź�
module my_clock(
input wire clk, //ʱ��,50MHZ
input wire rst_n, //��λ�ź�,�½�����Ч,negative
output wire sec_15//15s���һ�������ź�
);
parameter MAX_NUM = 30'd749_999_999;//�������15s,750_000_000��,Ϊ�˽�ʡ�ռ���ǰ-1
reg [29:0] cnt_15;//�����Ĵ���
reg sec_15_r;
//0.5s��ʱ��
always@(posedge clk or negedge rst_n)begin
if(!rst_n)begin
cnt_15 <= 25'd0;
end
else if(cnt_15 == MAX_NUM)begin
cnt_15 <= 25'd0;
end
else begin
cnt_15 <= cnt_15 + 1'd1;
end
end
//0.5s�����ź�
always@(posedge clk or negedge rst_n)begin
if(!rst_n)begin
sec_15_r <= 1'b0;
end
else if(cnt_15 == MAX_NUM)begin
sec_15_r <= 1'b1;
end
else begin
sec_15_r <= 1'b0;
end
end
assign sec_15 = sec_15_r;//���ұ߸ı�,������ֵ����� assign��always����
endmodule
2. ״̬���л�ģ��
module state_machine(
input clk,
input rst_n,
input wire sec_15
);
reg [2:0] cstate; //��̬
reg [2:0] nstate; //��̬
//״̬����
localparam state_ready = 0; //������״̬
localparam state_start = 1; //��������
localparam state_stop = 2; //ֹͣ����
localparam state_query = 3; //��ѯ���Խ��
localparam state_display = 4; //��ʾ���Խ��
localparam state_initialize = 5; //��ʼ��
//��һ��:��̬�����̬,ʱ����,��������ֵ
always@(posedge clk or negedge rst_n)begin
if(!rst_n)
cstate <= state_initialize;//��λ��������,��ǰ״̬����Ϊ��ʼ��
else
cstate <= nstate; //��һ��״̬��ֵ����ǰ״̬
end
//�ڶ���:�����,������ֵ
always@(*)begin
if(!rst_n)
begin
nstate = state_initialize;
end
else
case(cstate)
state_initialize: begin
if(sec_15 == 1'b1) //��״̬����ʱ��Ϊ1s,1s��,��һ��״̬����Ϊled1��
nstate = state_ready;
else
nstate = state_initialize;
end
state_ready: begin
if(sec_15 == 1'b1)
nstate = state_start;
else
nstate = state_ready;
end
state_start: begin
if(sec_15 == 1'b1)
nstate = state_stop;
else
nstate = state_start;
end
state_stop: begin
if(sec_15 == 1'b1)
nstate = state_query;
else
nstate = state_stop;
end
state_query: begin
if(sec_15 == 1'b1)
nstate = state_display;
else
nstate = state_query;
end
state_display: begin
if(sec_15 == 1'b1)
nstate = state_initialize;
else
nstate = state_display;
end
default: ;
endcase
end
endmodule
3. �����ļ�
module state_machine_top(
input wire clk,
input wire rst_n
);
wire sec_15;//������ģ����ź���������
//������ʱ��ģ��
my_clock inst_my_clock(
.clk (clk ),//ʱ��,50MHZ
.rst_n (rst_n ),//��λ�ź�,�½�����Ч,negative
.sec_15 (sec_15) //15s���һ�������ź�
);
//����״̬��ģ��
state_machine inst_state_machine(
.clk (clk ),//ʱ��,50MHZ
.rst_n (rst_n ),//��λ�ź�,�½�����Ч,negative
.sec_15 (sec_15) //15s�����ź�
);
endmodule
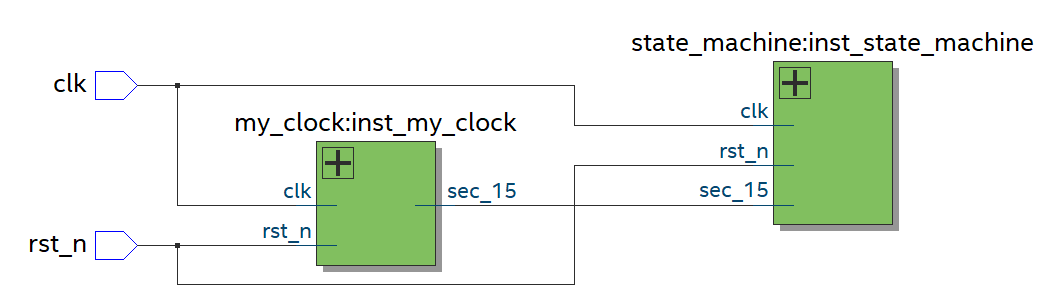
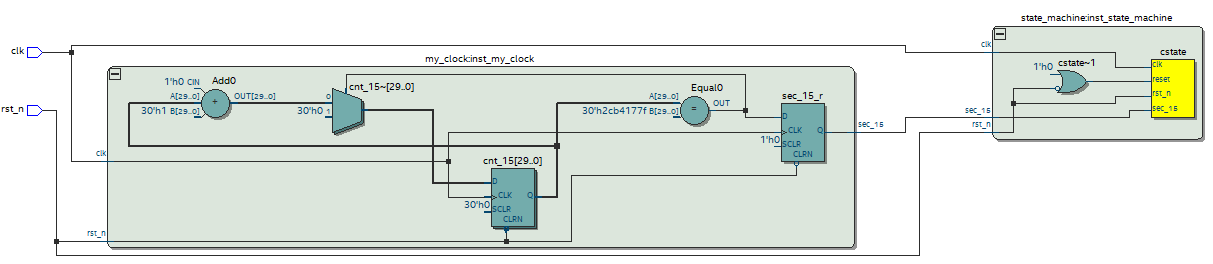
4. ������RTLview
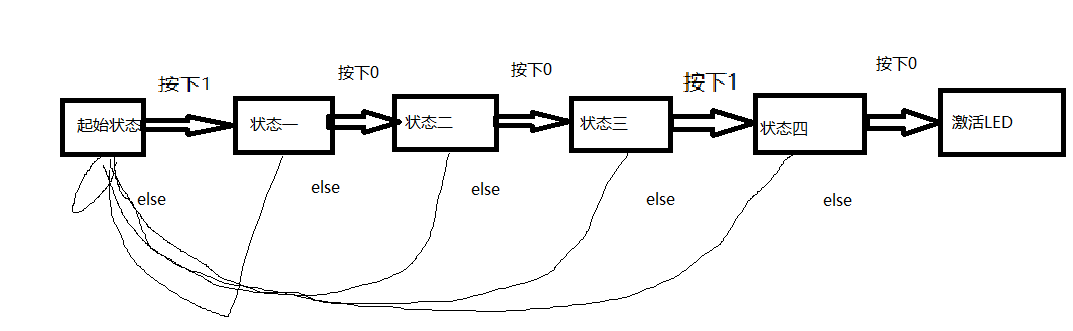
�����ܼ��10010��״̬��
���˼·������һ����������,ʹ��KEY1,KEY2�ֱ����0��1,����˳����10010ʱ,����һ��LED��ˮ�Ʊ�ʾ���ɹ�
1. �½�����
��ǰ��һ��,���ﲻ����
2. ��ư�������ģ��
module key_debounce(
input wire clk,
input wire rst_n,
input wire key,
output reg flag, //�ж϶����Ƿ������ı�־�ź�,0Ϊ����,1Ϊ��������
output reg key_value //�������ȶ��İ���ֵ����������ģ���LEDģ��
);
//����20ms�ӳټ�����,0.2s,1_000_000��
reg [19:0] delay_cnt;
//�Ĵ�����key��ֵ�����жϰ����Ƿ������ɹ�
reg key_reg;
//���°���20ms��ʱ������
always@(posedge clk or negedge rst_n)begin
if(!rst_n)
begin
key_reg <= 1'b1; //��λ�ź�,���ð�����Ч
delay_cnt <= 1'b0; //����������Ϊ0
end
else
begin
key_reg <= key;
if(key_reg ^ key) //����һ��keyֵ����һ��keyֵ��һ��,֤�����ڶ���
delay_cnt <= 20'd1_000_000; //�ӳ�ʱ��20ms
else if(delay_cnt > 0)
delay_cnt <= delay_cnt - 1; //û�ж���,��ʼ20ms����ʱ
else
delay_cnt <= 1'b0;
end
end
//������ʱ��������ȡ����״̬�Լ�����ֵ
always@(posedge clk or negedge rst_n)begin
if(!rst_n)
begin
flag <= 1'b0; //��λ�ź�,�����źű�־Ϊ����
key_value <= 1'b1; //���ó���ֵΪ1
end
else
begin
if(delay_cnt == 20'd1) //����ʱ1_000_000��1
begin
flag <= 1'b1;
key_value <= key; //�ȶ�20ms��keyֵ����key_value
end
else
begin
flag <= 1'b0;
key_value <= key_value; //20ms���Ȳ�ȡ��
end
end
end
endmodule
2. ��Ƶ�������ģ��
module state_machine_10010(
input clk,
input rst_n,
input [1:0] key,
output wire [3:0] led
);
parameter MAX_NUM = 24'd9_999_999;//0.2s��ʱ��
parameter T = 4'd10;//2s,100_000_000��
reg [2:0] cstate; //��̬
//״̬����
localparam state_0 = 0; //��ʼ״̬
localparam state_1 = 1; //����1
localparam state_10 = 2; //����10
localparam state_100 = 3; //����100
localparam state_1001 = 4; //����1001
localparam state_10010 = 5; //����10010
reg [3:0] cnt = 0; //��ʱ������ֵΪ0
reg [23:0] cnt_02 = 0;
reg time_flag;//��ʱ��־,1:��ʼ��ʱ,0:������ʱ
reg [3:0] led_r;
//0.2������ģ��
always@(posedge clk or negedge rst_n)begin
if(!rst_n)
cnt_02 <= 1'b0; //���¸�λ��,����
else if(cnt_02 == MAX_NUM)
cnt_02 <= 1'b0;
else
cnt_02 <= cnt_02 + 1'b1;
end
//2s������ģ��
always@(posedge clk or negedge rst_n)begin
if(!rst_n)
cnt <= 1'b0;//���¸�λ��,����
else if(time_flag == 1'b1)begin//��ʼ��ʱ
if(cnt_02 == MAX_NUM)begin
if(cnt < T)begin
cnt <= cnt + 1'b1;
end
else begin
cnt <= 1'b0;//cnt�����ﵽ�������
end
end
else begin
cnt <= cnt;//����ʱ�䱣��
end
end
else begin
cnt <= 1'b0;//����ʱ,cnt���
end
end
//״̬�л�ģ��
always@(posedge clk or negedge rst_n)begin
if(!rst_n)
begin
cstate <= state_0;
end
else
case(cstate)
state_0: begin
if(key[1] == 1'b1) //��״̬����ʱ��Ϊ1s,1s��,��һ��״̬����Ϊled1��
cstate <= state_1;
else if(key[0] == 1'b1)
cstate <= state_0;
else
cstate <= state_0;
end
state_1: begin
if(key[0] == 1'b1)
cstate <= state_10;
else if(key[1] == 1'b1)
cstate <= state_0;
else
cstate <= state_1;
end
state_10: begin
if(key[0] == 1'b1)
cstate <= state_100;
else if(key[1] == 1'b1)
cstate <= state_0;
else
cstate <= state_10;
end
state_100: begin
if(key[1] == 1'b1)
cstate <= state_1001;
else if(key[0] == 1'b1)
cstate <= state_0;
else
cstate <= state_100;
end
state_1001: begin
if(key[0] == 1'b1)begin
cstate <= state_10010;
time_flag <= 1'b1;//��ʼ��ʱ
end
else if(key[1] == 1'b1)
cstate <= state_0;
else
cstate <= state_1001;
end
state_10010: begin
if(cnt == T)begin
cstate <= state_0;
time_flag <= 1'b0;//������ʱ
end
else
cstate <= state_10010;
end
default: ;
endcase
end
//������:����״̬���
always@(posedge clk or negedge rst_n)begin
if(!rst_n)
led_r <= 4'b0001;
else
case(cstate)
state_10010:if(cnt_02 == 24'd4_999_999)
led_r <= 4'b1111;
else if(cnt_02 == MAX_NUM)
led_r <= 4'b0000;
else
led_r <= led_r;
default : led_r <= 4'b0001;
endcase
end
assign led = led_r;
endmodule
if(key[1] == 1'b1)
nstate = state_1001;
else if(key[0] == 1'b1)
nstate = state_0;
else
nstate = state_100;
end
state_1001: begin
if(key[0] == 1'b1)begin
nstate = state_10010;
time_flag = 1'b1;//��ʼ��ʱ
end
else if(key[1] == 1'b1)
nstate = state_0;
else
nstate = state_1001;
end
state_10010: begin
if(cnt == T)begin
nstate = state_0;
time_flag = 1'b0;//������ʱ
end
else
nstate = state_10010;
end
default: ;
endcase
end
//������:����״̬���
always@(posedge clk or negedge rst_n)begin
if(!rst_n)
led_r <= 4'b0001;
else
case(cstate)
state_10010:if(cnt_02 == 24'd4_999_999)
led_r <= 4'b1111;
else if(cnt_02 == MAX_NUM)
led_r <= 4'b0000;
else
led_r <= led_r;
default : led_r <= 4'b0001;
endcase
end
assign led = led_r;
endmodule
4. ��ƶ���ģ��
module state_machine_10010_top(
input wire clk,
input wire rst_n,
input wire [1:0] key,
output wire [3:0] led
);
wire [1:0] flag;
wire [1:0] key_value;
//��������KEY1
key_debounce inst_key_debounce(
.clk (clk ),
.rst_n (rst_n ),
.key (key[0] ),
.flag (flag[0] ), //�ж϶����Ƿ������ı�־�ź�,0Ϊ����,1Ϊ��������
.key_value(key_value[0]) //�������ȶ��İ���ֵ����������ģ���LEDģ��
);
//��������KEY2
key_debounce inst_key_debounce1(
.clk (clk ),
.rst_n (rst_n ),
.key (key[1] ),
.flag (flag[1] ), //�ж϶����Ƿ������ı�־�ź�,0Ϊ����,1Ϊ��������
.key_value(key_value[1]) //�������ȶ��İ���ֵ����������ģ���LEDģ��
);
//����״̬��
state_machine_10010(
.clk (clk ),
.rst_n(rst_n ),
.key ({~key_value[1]&&flag[1],~key_value[0]&&flag[0]}),
.led (led)
);
endmodule
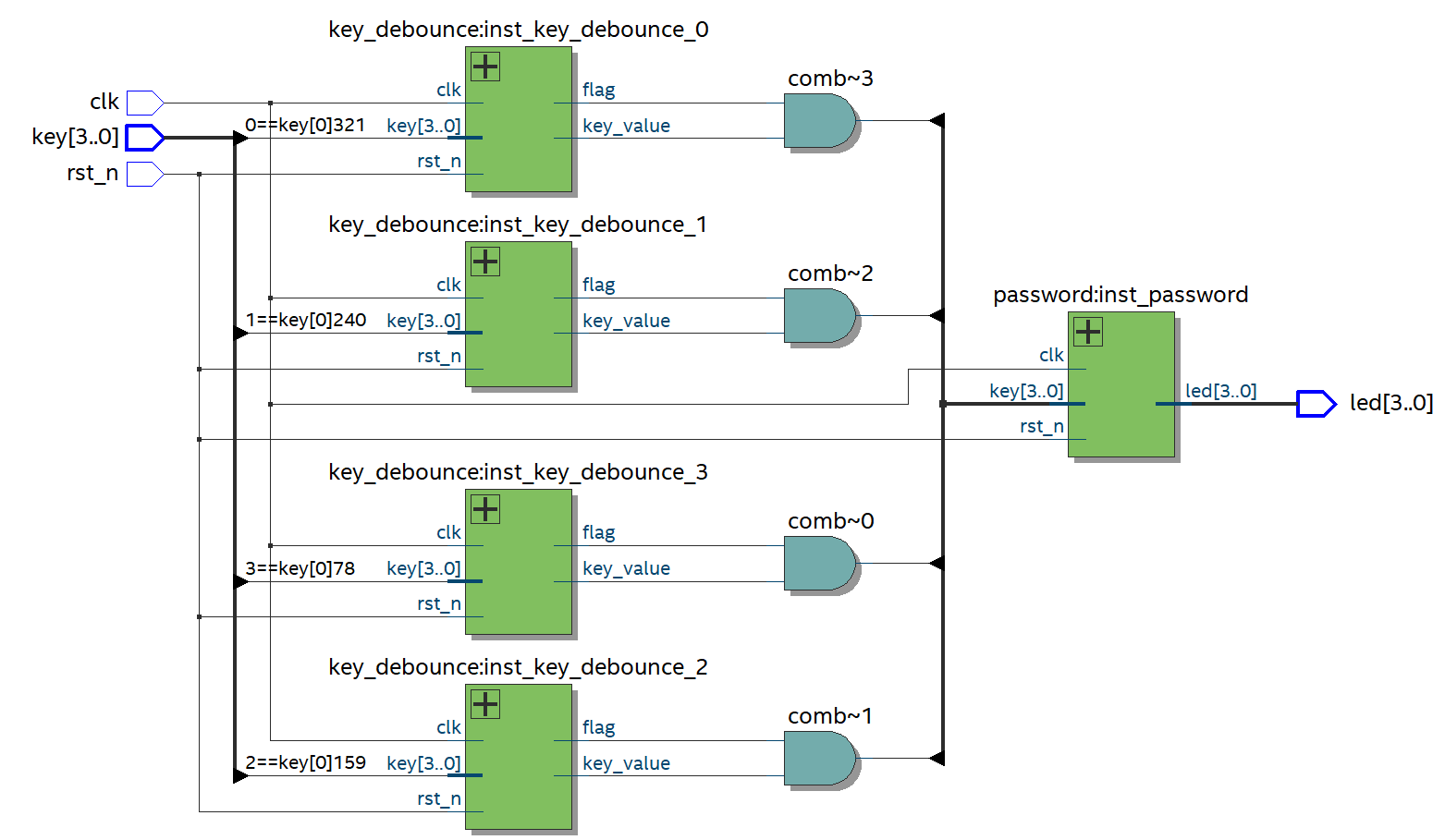
5. RTLview
6. ����