3.1 ����������״̬
3.1.1 ʲô������
????????FreeRTOS����ͬ���ճ�������˵�����������һ��,ָ�����εĹ���;ָ�����������Ρ�ֻ��FreeRTOS������ָ����(����Ҳ��Ϊ�����ij�ֹ���)��
????????���ճ�����Ϊ��,������������������,д��ҵ,�ظ�������Ϣ��д��ҵ���ظ���Ϣ������������

3.1.2 ʲô�Ƕ���������
????????һ��ʱ�����,ͬʱִ�ж����Զ����Ĺ���(����)��
????????����,дһ����ҵ,�ٻظ�һ����Ϣ,һ��ʱ����ͬʱִ����������,����Ƕ��������С�
3.1.3 ����״̬(State)
? ? ? ? ����״̬����������������������״��(����״��)��
????????����,��д��ҵ���ڽ���״̬ʱ,�ظ���Ϣ�ʹ����ݶ�״̬;���ظ���Ϣ���ڽ���״̬ʱ,д��ҵ������ͣ״̬��
????????�����״̬��Ϊ2��:����(Runing)��������(Not Running)�����ڷ����е�״̬,�����Լ���ϸ��Ϊ ����״̬(Ready),����״̬(Blocked),��ͣ״̬(Suspended)��
����(Running):��������ִ��,��ʱռ�ô�����������,����д��ҵ��������״̬,
����(Ready):���������ȫ������,��ʱ��������,ֻ�ǻ��ֲ�����,�ȴ�����,�´�����������ʼ��Ϊ����̬������,�ֻ���������,��ʱ�����Է�������Ϣ�ˡ�
����(Blocked):����ǰ���ڵȴ�ij���¼�,�����ź������ⲿ�жϡ�����,ֹͣд��ҵ,�ȴ���Ϣ,д��ҵ�Ϳ�����(����״̬û��������,д��ҵ��������״̬,���յ���Ϣ�ظ����,��д)��
��ʵ�ʲ�Ʒ��,���Dz�����һ������һֱ����,����ʹ��"�¼�����"�ķ�����������:
-
����Ҫ�ȴ�ij���¼�,�¼�����������������
-
�ڵȴ��¼�������,��������CPU��Դ
-
�ڵȴ��¼��Ĺ�����,�������ʹ�������״̬(Blocked)
������״̬������,�����Եȴ��������͵��¼�:
-
ʱ����ص��¼�
-
���Եȴ�һ��ʱ��:�ҵ�2����
-
Ҳ����һֱ�ȴ�,ֱ��ij������ʱ��:�ҵȵ�����3��
-
-
ͬ���¼�:���¼��ɱ������,�������жϳ������
-
����1:����A�ȴ�����B������������
-
����2:����A�ȴ��û����°���
-
ͬ���¼�����Դ�кܶ�(��Щ�����ں����ϸ��):
-
����(queue)
-
�������ź���(binary semaphores)
-
�����ź���(counting semaphores)
-
������(mutexes)
-
�ݹ黥�������ݹ���(recursive mutexes)
-
�¼���(event groups)
-
����֪ͨ(task notifications)
-
-
�ڵȴ�һ��ͬ���¼�ʱ,���Լ��ϳ�ʱʱ�䡣����ȴ���������,��ʱʱ����Ϊ10ms:
-
10ms֮�������ݵ���:�ɹ�����
-
10ms����,����û������:��ʱ����
��ͣ(Suspended)(����):���ڹ���̬������Ե����������Dz��ɼ��ġ�����,������������,�ֻ�����һ��ȥ��(���ֻ��ҵ�һ��ȥ��)
FreeRTOS�е�����Ҳ���Խ�����ͣ״̬,Ψһ�ķ�����ͨ��vTaskSuspend������
����ԭ������:
void vTaskSuspend( TaskHandle_t xTaskToSuspend ); //�������ΪNULL,��ʾ��ͣ�Լ���Ҫ�˳���ͣ״̬,ֻ��������������:
-
����������:vTaskResume
-
�жϳ������:xTaskResumeFromISR
ʵ�ʿ�����,��ͣ״̬�õò��ࡣ
3.1.4 �������ȼ�(Priority)
д��ҵ,����Ϣ? �������ȼ�һ��,������;
�����Ż���,ʲô����˵��,�����:���ȼ����ߡ�
????????FreeRTOS���ȼ���ȡֵ��Χ��:0~(configMAX_PRIORITIES �C 1),��ֵԽ�����ȼ�Խ�ߡ������ȼ������������С���ͬ���ȼ��ġ������е���������ִ�С���configMAX_PRIORITIES��ȡֵû�����ơ�����configMAX_PRIORITIES��ȡֵ���Ǿ���С,��ΪȡֵԽ��Խ�˷��ڴ�,Ҳ�˷�ʱ�䡣 һ�㲻����32��
3.1.5 ջ(Stack)
-
д��ҵʱ,��Ҫ�ǵ�д��������
-
����Ϣʱ,��Ҫ�ǵøղ��ĵ���ɶ
-
����ͬ������,��Щϸ�ڲ�һ��
-
��������˵,��Ȼ�Ǽ���������
-
���ڳ���,�Ǽ���ջ��
-
ÿ���������Լ���ջ
3.2 ��������
3.2.1 ��������ʱʹ�õĺ���
����ԭ��:
BaseType_t xTaskCreate( TaskFunction_t pxTaskCode, // ����ָ��, ������(һ����ѭ������)
const char * const pcName, // ���������,FreeRTOS�ڲ���ʹ����,������������á�����Ϊ:configMAX_TASK_NAME_LEN
const configSTACK_DEPTH_TYPE usStackDepth, // ջ��С,ÿ���������Լ���ջ����λu32,����10��ʾ��40���ֽ�
void * const pvParameters, // ����������ʱ����IJ���
UBaseType_t uxPriority, // ���ȼ�
TaskHandle_t * const pxCreatedTask ); // ������, �Ժ�ʹ���������������������˵��:
| ���� | ���� |
|---|---|
| pvTaskCode | ����ָ��,���Լ���Ϊ�������һ��C������ ��������һ��:��Զ���˳�,�����˳�ʱҪ����"vTaskDelete(NULL)" |
| pcName | ���������,FreeRTOS�ڲ���ʹ����,������������á� ����Ϊ:configMAX_TASK_NAME_LEN |
| usStackDepth | ÿ���������Լ���ջ,����ָ��ջ��С�� ��λ��word,���紫��100,��ʾջ��СΪ100 word,Ҳ����400�ֽڡ� ���ֵΪuint16_t�����ֵ�� ��ôȷ��ջ�Ĵ�С,��������,�ܶ�ʱ���ǹ��ơ� ��ȷ�İ취�ǿ�������롣 |
| pvParameters | ����pvTaskCode����ָ��ʱ�õ�:pvTaskCode(pvParameters) |
| uxPriority | ���ȼ���Χ:0~(configMAX_PRIORITIES �C 1) ��ֵԽС���ȼ�Խ��, �����������ֵ,xTaskCreate���������Ϊ(configMAX_PRIORITIES �C 1) |
| pxCreatedTask | ������,�����ɹ��Ժ�᷵�ش������������,��������ʵ����������ƿ��ַ���˲����������������������������API�������ܻ�ʹ�õ�������,�������������ȼ�,���������Դ���NULL�� |
| ����ֵ | �ɹ�:pdPASS; ʧ��:errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY(ʧ��ԭ��ֻ���ڴ治��) ע��:�ĵ��ﶼ˵ʧ��ʱ����ֵ��pdFAIL,�ⲻ�ԡ� pdFAIL��0,errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY��-1�� |
3.2.3 ʾ��1: ��������
/**
******************************************************************************
* @brief ������ ����
* @param pvParameters: �������ָ��
* @retval None
* @note
******************************************************************************
*/
void vTask1( void *pvParameters )
{
pvParameters = pvParameters; //ʹ��һ��,��ֹ�������
for( ;; ) //������������һ�㶼������ѭ��,
{
printf( "T1 run\r\n"); //��ӡ����1����Ϣ
vTaskDelay(5);
}
}
void vTask2( void *pvParameters )
{
pvParameters = pvParameters; //ʹ��һ��,��ֹ�������
for( ;; ) //������������һ�㶼������ѭ��,
{
printf( "T2 run\r\n"); //��ӡ����2����Ϣ
vTaskDelay(5);
}
}
/**
******************************************************************************
* @brief main ����
* @param None
* @retval None
* @note �Զ�����һ����ѭ������,���Զ����ɵ�main()�����е��á�Ϊ�˼������Զ����ɵĺ���
******************************************************************************
*/
void MainLoop(void)
{
printf("FreeRTOS Test\r\n");
xTaskCreate(vTask1, "Task1", 128, NULL, 1, NULL);
xTaskCreate(vTask2, "Task2", 128, NULL, 1, NULL);
vTaskStartScheduler(); //�����������.һ����������ϵͳ,CPU�ͻ��ܵ�������ȥִ�д���
for( ;; );
}ģ��������н������:
?ע��:
-
task 2������!
-
Ҫ����xTaskCreate�Ĵ������֪��ԭ��:�������ȼ��ġ����ߺ��洴�������������С�
3.2.4 ʾ��2: ����һ�������������������
/**
******************************************************************************
* @brief ������ ����
* @param pvParameters: �������ָ��
* @retval None
* @note
******************************************************************************
*/
void vTaskFunction( void *pvParameters )
{
const char *pcTaskText = pvParameters;
for( ;; ) //������������һ�㶼������ѭ��,
{
printf(pcTaskText); //��ӡ�������Ϣ
vTaskDelay(5);
}
}
/**
******************************************************************************
* @brief main ����
* @param None
* @retval None
* @note �Զ�����һ����ѭ������,���Զ����ɵ�main()�����е��á�Ϊ�˼������Զ����ɵĺ���
******************************************************************************
*/
void MainLoop(void)
{
static const char *pcTextForTask1 = "T1 run\r\n";
static const char *pcTextForTask2 = "T2 run\r\n";
printf("FreeRTOS Test\r\n");
xTaskCreate(vTaskFunction, "Task1", 128, (void *)pcTextForTask1, 1, NULL);
xTaskCreate(vTaskFunction, "Task2", 128, (void *)pcTextForTask2, 1, NULL);
vTaskStartScheduler(); //�����������.һ����������ϵͳ,CPU�ͻ��ܵ�������ȥִ�д���
for( ;; );
}ģ��������н������:
?ע,����������ʹ��ͬһ������,�������:
-
ջ��ͬ
-
��������ʱ���Դ��벻ͬ�IJ���
3.3?ɾ������
3.3.1 ɾ������ʱʹ�õĺ���
����ԭ��:
void vTaskDelete( TaskHandle_t xTaskToDelete ); //xTaskToDelete Ҫɾ��������ľ��������NULL�����µ�������ɾ��������˵��:Ҫɾ��������ľ��������NULL��*���µ�������ɾ����
| ���� | ���� |
|---|---|
| xTaskToDelete? | Ҫɾ��������ľ����ʹ��xTaskCreate��������ʱ���Դ���һ������� Ҳ�ɴ���NULL,���ʾɾ���Լ��� |
3.3.2 ʾ��: ɾ������
-
��������1:����1�Ĵ�ѭ����,��������2,Ȼ������һ��ʱ��
-
����2:��ӡһ�仰,Ȼ���ɾ���Լ�
/**
******************************************************************************
* @brief ������ ����
* @param pvParameters: �������ָ��
* @retval None
* @note
******************************************************************************
*/
TaskHandle_t xTask2Handle; //����1���
void vTask2( void *pvParameters )
{
pvParameters = pvParameters; //ʹ��һ��,��ֹ�������
for( ;; ) //������������һ�㶼������ѭ��,
{
printf( "T2 Delete\r\n"); //��ӡ����1����Ϣ
vTaskDelete(xTask2Handle); // ����ֱ�Ӵ������NULL, ����ֻ��Ϊ����ʾ�����÷�
}
}
void vTask1( void *pvParameters )
{
const TickType_t xDelay100ms = pdMS_TO_TICKS( 100UL );
BaseType_t ret;
pvParameters = pvParameters; //ʹ��һ��,��ֹ�������
for( ;; ) //������������һ�㶼������ѭ��,
{
printf( "T1 run\r\n"); //��ӡ����2����Ϣ
ret = xTaskCreate( vTask2, "Task2", 128, NULL, 2, &xTask2Handle );
if(ret != pdPASS)
{
printf("Create Task2 Failed\r\n");
}
// ��������ߵĻ�, Idle�������õ�ִ��
// Idel�������������2ʹ�õ��ڴ�
// �����������Idle������ִ��, ����ڴ�ľ�,ϵͳ����
vTaskDelay(xDelay100ms);
}
}
/**
******************************************************************************
* @brief main ����
* @param None
* @retval None
* @note �Զ�����һ����ѭ������,���Զ����ɵ�main()�����е��á�Ϊ�˼������Զ����ɵĺ���
******************************************************************************
*/
void MainLoop(void)
{
printf("FreeRTOS Test\r\n");
xTaskCreate(vTask1, "Task1", 128, NULL, 1, NULL);
vTaskStartScheduler(); //�����������.һ����������ϵͳ,CPU�ͻ��ܵ�������ȥִ�д���
for( ;; );
}ģ��������н������:
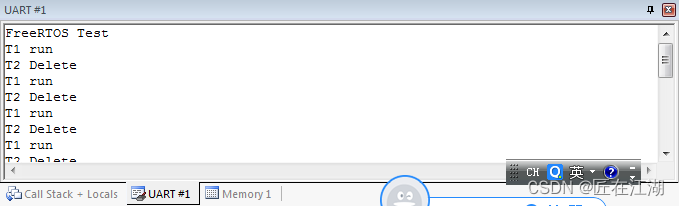
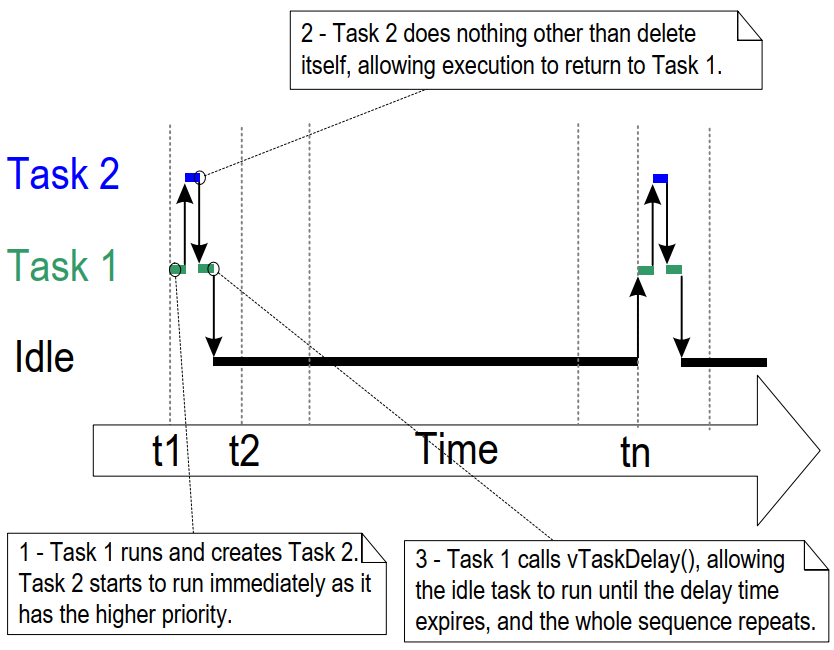
?��������ͼ:
-
main�����д�������1,���ȼ�Ϊ1������1����ʱ,����������2,����2�����ȼ���2��
-
����2�����ȼ����,������ִ�С�
-
����2��ӡһ�仰��,��ɾ�����Լ���
-
����2��ɾ����,����1�����ȼ����,�ֵ�����1��������,������
vTaskDelay()����Block״̬ -
����1 Block�ڼ�,�ֵ�Idle����ִ��:���ͷ�����2���ڴ�(TCB��ջ)
-
ʱ�䵽��,����1��Ϊ������ȼ����������ִ�С�
-
���ѭ����
����1�Ĵ�����,��Ҫע�����:xTaskCreate�ķ���ֵ��
-
�ܶ��ֲ���˵��ʧ��ʱ����ֵ��pdFAIL,�������0
-
��ʵʧ��ʱ����ֵ��errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY,�������-1
-
Ϊ�˱������,����ʹ�÷���ֵ��pdPASS���Ƚ�,�������1
3.4 �������ȼ���Tick
3.4.1 �������ȼ�?
| ���ȼ���ȡֵ��Χ | ���ȼ�Խ�� | ��������˳�� |
| 0~(configMAX_PRIORITIES �C 1) | ��ֵԽ�� | �����ȼ�������;ͬ���ȼ�,����������,����ִ�� |
| ? ? ? ?���������� | configMAX_PRIORITIES? ? ? ? ? ? ? ? ?��С | ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?����ʹ�� | |
| ʹ��C����ʵ��ʱ | �����еļܹ�����ͬ���Ĵ��� | û������,��ȡֵԽ��Խ�˷� �ڴ� �� ʱ�䡣 | configUSE_PORT_OPTIMISED_TASK_SELECTION������Ϊ 0 |
| ʹ�û��ʵ��ʱ | ��Լܹ���ص��Ż��� | ȡֵ���ܳ��� 32 | configUSE_PORT_OPTIMISED_TASK_SELECTION������Ϊ 1 |
3.4.2 TickƵ����ͬ����������
FreeRTOS��TickƵ����FreeRTOSConfig.h�ļ���configTICK_RATE_HZ�����������������������ʱ�䡣Tick��ʱ��Ӳ����ʱ���жϲ���,STM32�����ں�Tick�δ�ʱ��������
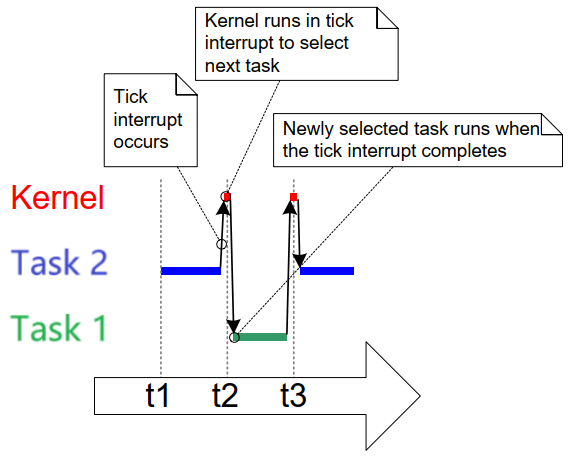
#define configTICK_RATE_HZ ( ( TickType_t ) 1000 ) // 1000HZ ���� 1 msͬ���ȼ���������ô�л���?�뿴��ͼ:
-
����2��t1ִ�е�t2
-
��t2����tick�ж�,����tick�жϴ�������:
-
ѡ����һ��Ҫ���е�����
-
ִ�����жϴ���������,�л����µ�����:����1
-
-
����1��t2ִ�е�t3
-
����ͼ�п��Կ���,�������е�ʱ�䲢�����ϸ��t1,t2,t3���↑ʼ
3.4.3 ����Tickʱ����ʱ
ʹ��Tick������ʱ��,����:
vTaskDelay(2); // �ȴ�2��Tick,����configTICK_RATE_HZ=100, Tick����ʱ10ms, �ȴ�20ms
//��ʹ��pdMS_TO_TICKS���msת��Ϊtick,��configTICK_RATE_HZ�ı���,����Ҳ����ȥ�Ĵ��롣
vTaskDelay(pdMS_TO_TICKS(100)); // �ȴ�100msע��,����Tickʵ�ֵ���ʱ������ȷ,����vTaskDelay(2)�ı������ӳ�2��Tick����,�п��ܾ���1��Tick��һ��ͷ����ˡ�ȡ�����������,vTaskDelay()����Ҫ���ϵij��ϡ�
����ͼ:

3.4.3 ʾ��: ���ȼ�ʵ��
����3������:
-
����1������2:���ȼ���ͬ,����1
-
����3:���ȼ����,��2
/**
******************************************************************************
* @brief ������ ����
* @param pvParameters: �������ָ��
* @retval None
* @note
******************************************************************************
*/
void vTask1( void *pvParameters )
{
pvParameters = pvParameters; //ʹ��һ��,��ֹ�������
for( ;; ) //������������һ�㶼������ѭ��,
{
printf( "T1\r\n"); //��ӡ�������Ϣ
}
}
void vTask2( void *pvParameters )
{
pvParameters = pvParameters; //ʹ��һ��,��ֹ�������
for( ;; ) //������������һ�㶼������ѭ��,
{
printf( "T2\r\n"); //��ӡ�������Ϣ
}
}
void vTask3( void *pvParameters )
{
const TickType_t xDelay3000ms = pdMS_TO_TICKS( 3000UL );
pvParameters = pvParameters; //ʹ��һ��,��ֹ�������
for( ;; ) //������������һ�㶼������ѭ��,
{
printf( "T3\r\n"); //��ӡ�������Ϣ
vTaskDelay(xDelay3000ms); // ��������ߵĻ�, �����������õ�ִ��
}
}
/**
******************************************************************************
* @brief main ����
* @param None
* @retval None
* @note �Զ�����һ����ѭ������,���Զ����ɵ�main()�����е��á�Ϊ�˼������Զ����ɵĺ���
******************************************************************************
*/
void MainLoop(void)
{
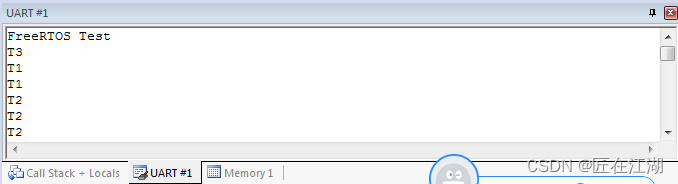
printf("FreeRTOS Test\r\n");
xTaskCreate(vTask1, "Task1", 128, NULL, 1, NULL);
xTaskCreate(vTask2, "Task2", 128, NULL, 1, NULL);
xTaskCreate(vTask3, "Task3", 128, NULL, 2, NULL);
vTaskStartScheduler(); //�����������.һ����������ϵͳ,CPU�ͻ��ܵ�������ȥִ�д���
for( ;; );
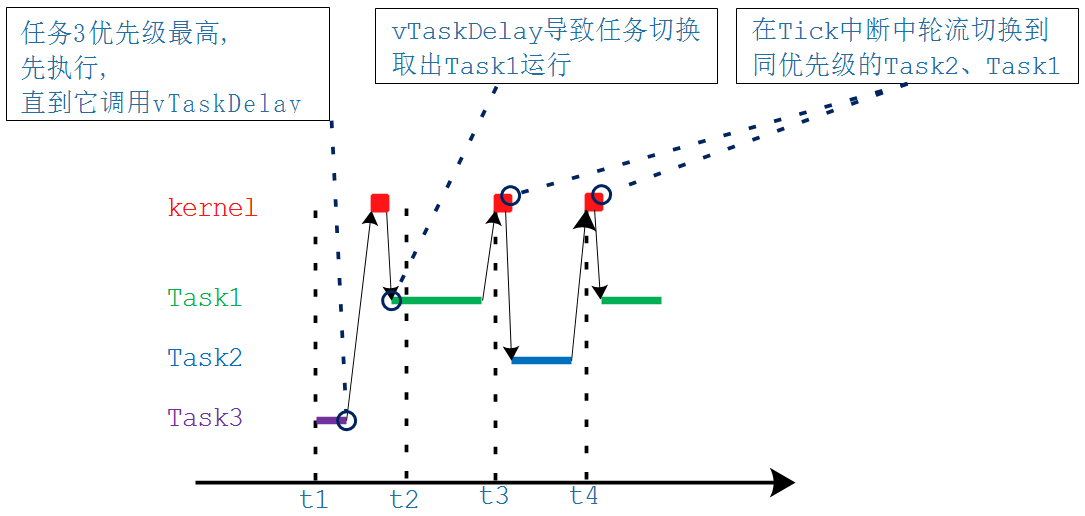
}�����������ͼ��ʾ:
-
����3����ִ��,ֱ��������vTaskDelay������������
-
����1������2:����ִ��(����1����һ���,����ʱ�仹û��,������������1,��������1�������β��ֵ�����2;����2ͬ��)
?�����������ͼ��ʾ:
3.4.4 ʾ��: �����������ȼ�ʵ��
/* ʹ�ò���xTask��ָ������,����ΪNULL��ʾ��ȡ�Լ������ȼ� */
UBaseType_t uxTaskPriorityGet( const TaskHandle_t xTask ); // �����������ȼ�
/* ʹ�ò���xTask��ָ������,����ΪNULL��ʾ�����Լ������ȼ�; ����uxNewPriority��ʾ�µ����ȼ�,ȡֵ��Χ��0~(configMAX_PRIORITIES �C 1) */
void vTaskPrioritySet( TaskHandle_t xTask,
UBaseType_t uxNewPriority ); // ������������ȼ�
/**
******************************************************************************
* @brief ������ ����
* @param pvParameters: �������ָ��
* @retval None
* @note Task1,Task2�������������������ͣ״̬�������ȼ�����˭������
******************************************************************************
*/
TaskHandle_t xTask2Handle;
void vTask1( void *pvParameters )
{
UBaseType_t uxPriority = uxTaskPriorityGet( NULL ); //�õ��Լ������ȼ�
pvParameters = pvParameters; //ʹ��һ��,��ֹ�������
for( ;; ) //������������һ�㶼������ѭ��,
{
printf("T1\r\n"); //��ӡ�������Ϣ
printf("Task2 priority high\r\n" );
vTaskPrioritySet( xTask2Handle, ( uxPriority + 1 ) ); //����Task2�����ȼ�����Task1, Task2�ἴ��ִ��
/*
���Task1�����е�����,��ʾ�������ȼ���Task2��
�Ǿͱ�ʾTask2�϶����Լ������ȼ�������
*/
printf("Task2 priority low\r\n" );
}
}
void vTask2( void *pvParameters )
{
UBaseType_t uxPriority = uxTaskPriorityGet( NULL ); //�õ��Լ������ȼ�
pvParameters = pvParameters; //ʹ��һ��,��ֹ�������
for( ;; ) //������������һ�㶼������ѭ��,
{
/*
�����е������ʾTask2�����ȼ�����Task1
Task1�����Task2�����ȼ�
*/
printf("T2\r\n"); //��ӡ�������Ϣ
printf("Task2 priority low\r\n" );
vTaskPrioritySet( xTask2Handle, ( uxPriority - 2 ) ); //����Task2�Լ������ȼ�,����С��Task1, Task1��������
}
}
/**
******************************************************************************
* @brief main ����
* @param None
* @retval None
* @note �Զ�����һ����ѭ������,���Զ����ɵ�main()�����е��á�Ϊ�˼������Զ����ɵĺ���
******************************************************************************
*/
void MainLoop(void)
{
printf("FreeRTOS Test\r\n");
xTaskCreate(vTask1, "Task1", 128, NULL, 2, NULL);
xTaskCreate(vTask2, "Task2", 128, NULL, 1, &xTask2Handle);
vTaskStartScheduler(); //�����������.һ����������ϵͳ,CPU�ͻ��ܵ�������ȥִ�д���
for( ;; );
}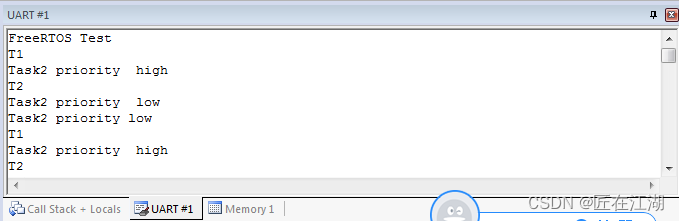
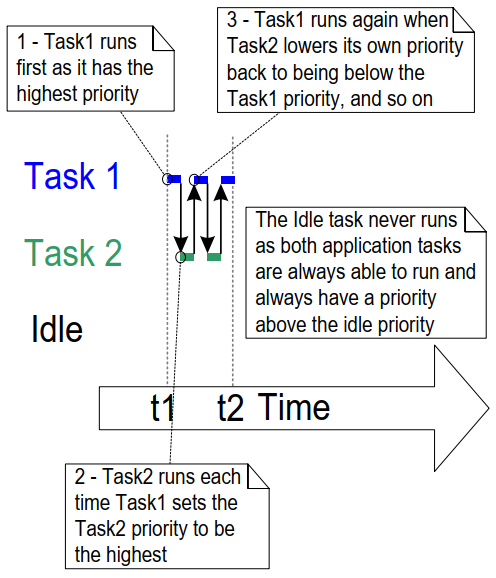
?�����������ͼ��ʾ:
-
1:һ��ʼTask1���ȼ����,����ִ�С���������Task2�����ȼ���
-
2:Task2�����ȼ����,��ִ�С������Լ������ȼ������ˡ�
-
3:Task1�����ȼ����,�ٴ�ִ�С���������Task2�����ȼ���
-
���ѭ����
-
ע��:Task1�����ȼ�һֱ��2,Task2�����ȼ���3��1,������0������Idel����û�л���ִ�С�
3.4.4 ʾ��: �����������ȼ�ʵ��
3.5 Delay����
3.5.1 ����Delay����
����ԭ������:
// vTaskDelay:���ٵȴ�ָ��������Tick Interrupt���ܱ�Ϊ����״̬
void vTaskDelay( const TickType_t xTicksToDelay ); // xTicksToDelay: �ȴ����ٸ�Tick����
/* vTaskDelayUntil:�ȴ���ָ���ľ���ʱ��,���ܱ�Ϊ����̬��
pxPreviousWakeTime: ��һ�α����ѵ�ʱ�� Tick Count
xTimeIncrement: �ȴ����ٸ�Tick ����
*/
BaseType_t xTaskDelayUntil( TickType_t * const pxPreviousWakeTime,
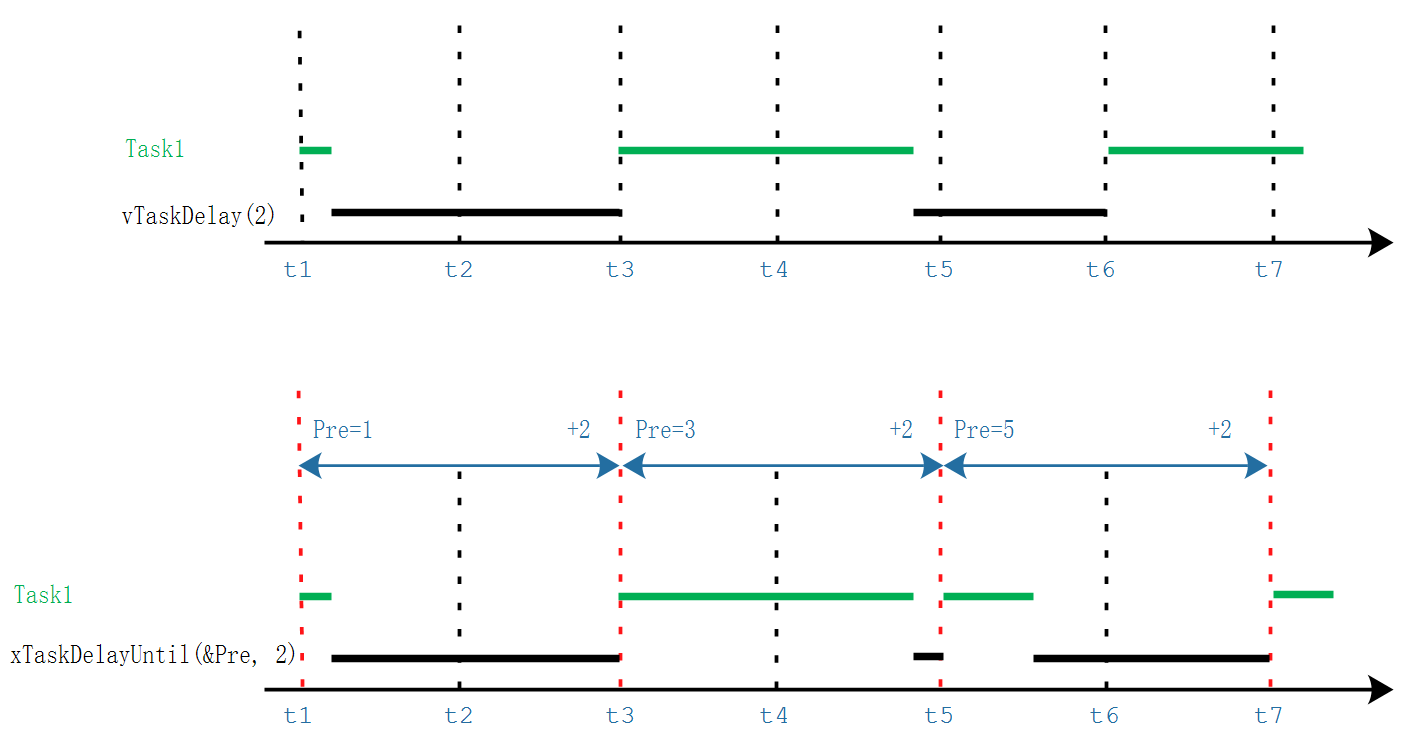
const TickType_t xTimeIncrement );���滭ͼ˵��:
-
ʹ��vTaskDelay(n)ʱ,���롢�˳�vTaskDelay��ʱ����������n��Tick�ж�
-
ʹ��xTaskDelayUntil(&Pre, n)ʱ,ǰ�������˳�xTaskDelayUntil��ʱ��������n��Tick�ж�
-
�˳�xTaskDelayUntilʱ����ͽ���ľ���״̬,һ�㶼�ܵõ�ִ�л���
-
���Կ���ʹ��xTaskDelayUntil�������������Ե�����
-
3.5.2 ʾ��: Delay
����2������:
-
Task1:
-
�����ȼ�
-
���ñ���flagΪ1,Ȼ�����
vTaskDelay(xDelay50ms);��vTaskDelayUntil(&xLastWakeTime,?xDelay50ms);
-
-
Task2:
-
�����ȼ�
-
���ñ���flagΪ0
-
/**
******************************************************************************
* @brief ���� ����
* @param pvParameters: �������ָ��
* @retval None
* @note
******************************************************************************
*/
volatile char flag;
void vTask1( void *pvParameters )
{
const TickType_t xDelay50ms = pdMS_TO_TICKS( 50UL );
TickType_t xLastWakeTime;
int i;
pvParameters = pvParameters; //ʹ��һ��,��ֹ�������
for( ;; ) //������������һ�㶼������ѭ��,
{
flag = 1;
for(i=0; i<5; i++) printf("T1\r\n"); //��ӡ�������Ϣ
#if 0 //ʹ������������ѡ��Delay����,1��Ϊ0�Ϳ���ʹ��vTaskDelayUntil
vTaskDelay(xDelay50ms);
#else
vTaskDelayUntil(&xLastWakeTime, xDelay50ms);
#endif
}
}
void vTask2( void *pvParameters )
{
pvParameters = pvParameters; //ʹ��һ��,��ֹ�������
for( ;; ) //������������һ�㶼������ѭ��,
{
flag = 0;
printf("T2\r\n"); //��ӡ�������Ϣ
}
}
/**
******************************************************************************
* @brief main ����
* @param None
* @retval None
* @note �Զ�����һ����ѭ������,���Զ����ɵ�main()�����е��á�Ϊ�˼������Զ����ɵĺ���
******************************************************************************
*/
void MainLoop(void)
{
printf("FreeRTOS Test\r\n");
xTaskCreate(vTask1, "Task1", 128, NULL, 2, NULL);
xTaskCreate(vTask2, "Task2", 128, NULL, 1, NULL);
vTaskStartScheduler(); //�����������.һ����������ϵͳ,CPU�ͻ��ܵ�������ȥִ�д���
for( ;; );
}
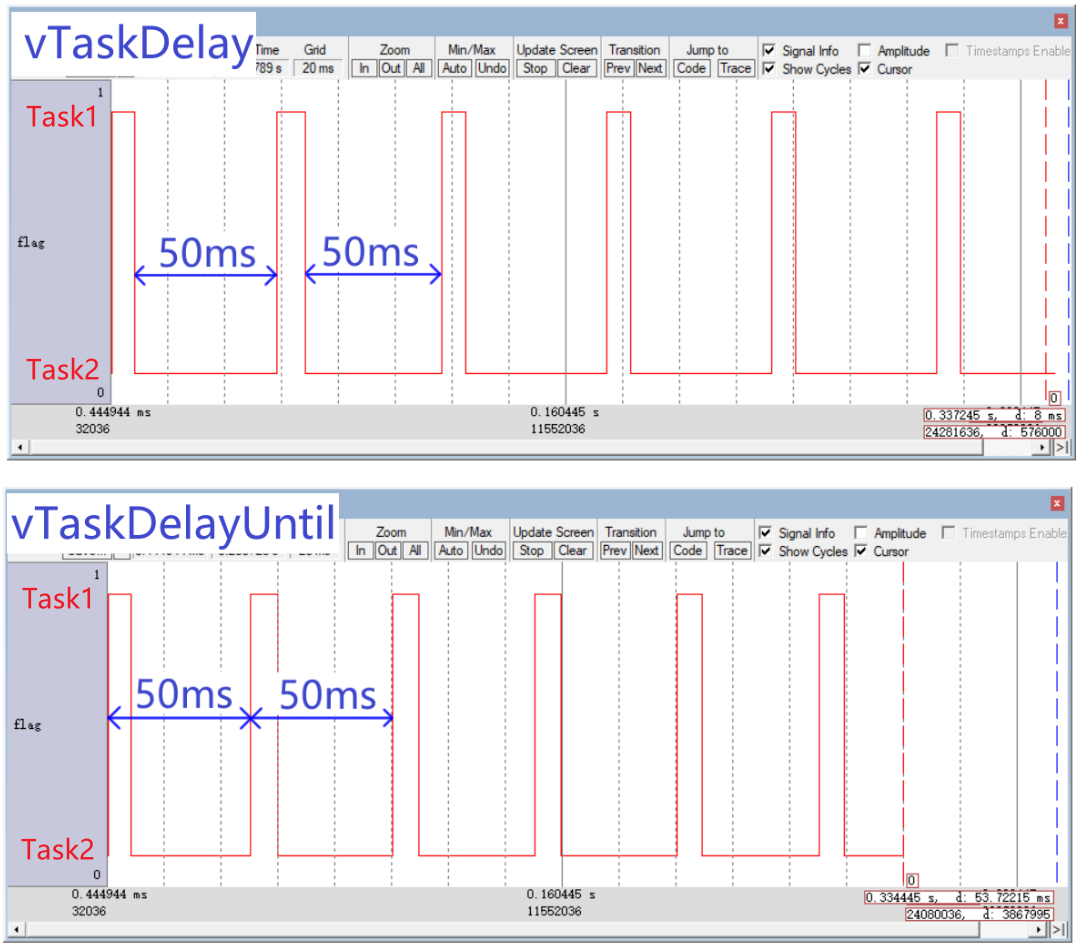
ʹ��Keil���������۲�flag������bit����,����:
-
flagΪ1ʱ��ʾTask1������,flagΪ0ʱ��ʾTask2������,Ҳ����Task1��������״̬
-
vTaskDelay:ָ������������ʱ��
-
vTaskDelayUntil:ָ����������ִ�еļ��������
3.6 ��������(Idle����)���乳�Ӻ���
3.6.1 ����
????????��ʹ��?vTaskStartScheduler()?����������������������ʱ,��������ڲ��ᴴ����������
���������ص�:
-
�����������ȼ�Ϊ0:�������谭�û���������
-
��������Ҫô���ھ���̬,Ҫô��������̬,��Զ��������
������������:
-
�ͷű�ɾ����������ڴ�
-
���û�����������״̬ʱ,�����������Ҹ���������,����Ҫ�ṩ����Զ�������Ŀ�������
-
���������ѭ��ÿִ��һ��,�ͻ����һ�ι��Ӻ��������������Ӻ���(Idle Task Hook Functions)���û�ʵ��һЩ����ܡ�
3.6.2 ��������Ĺ��Ӻ���
��������Ĺ��Ӻ���������:
-
ִ��һЩ�����ȼ��ġ���̨�ġ���Ҫ����ִ�еĺ���
-
����ϵͳ�Ŀ���ʱ��:���������ܱ�ִ�о���ζ�����еĸ����ȼ�����ֹͣ��,���Բ�����������ռ�ݵ�ʱ��,�Ϳ������������ռ���ʡ�
-
��ϵͳ����ʡ��ģʽ:���������ܱ�ִ�о���ζ��û����Ҫ������Ҫ��,��Ȼ���Խ���ʡ��ģʽ�ˡ�
��������Ĺ��Ӻ���������:
-
���ܵ��¿��������������״̬����ͣ״̬
-
������ʹ��?
vTaskDelete()?��ɾ������,��ô���Ӻ���Ҫ�dz���Ч��ִ�С��������������ֲ���ڹ��Ӻ�����Ļ�,�������ͷ��ڴ档
ʹ�ܿ��������Ӻ���:��FreeRTOSConfig.h��,�� configUSE_IDLE_HOOK �궨��Ϊ 1

���������Ӻ���:vApplicationIdleHook()

3.7 �����㷨
3.7.1 ��Ҫ����
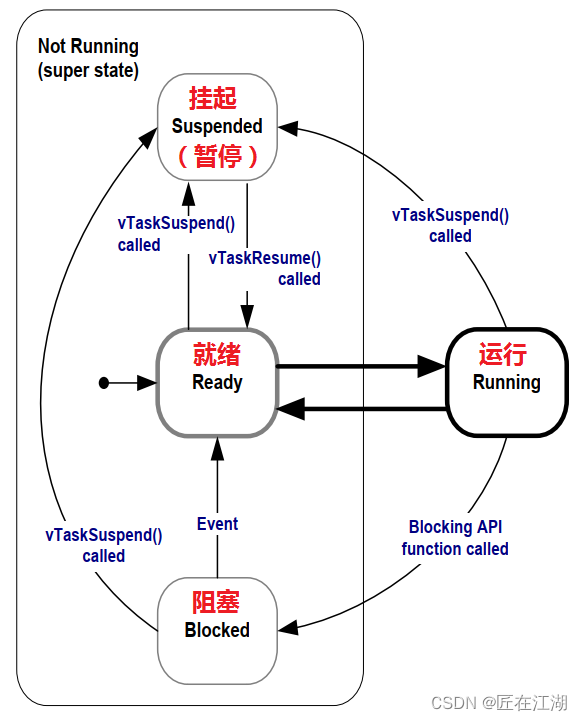
????????�������е�����,����Ϊ"����ʹ�ô�����",����������״̬���ڵ�����ϵͳ��,�κ�ʱ����ֻ����һ������������״̬��������״̬������,��������3��״̬֮һ:����(Blocked)����ͣ(Suspended)������(Ready)��
????????����״̬������,���Ա���������ѡ�����л�Ϊ����״̬,��������Զ������ѡ������ȼ��ľ���̬����������������״̬��
????????����״̬������,���ڵȴ�"�¼�",���¼�����ʱ����ͻ�������״̬���¼���Ϊ����:ʱ����ص��¼���ͬ���¼�����νʱ����ص��¼�,�������ó�ʱʱ��:��ָ��ʱ��������,ʱ�䵽�˾ͽ������״̬��ʹ��ʱ����ص��¼�,����ʵ�������ԵĹ��ܡ�����ʵ�ֳ�ʱ���ܡ�ͬ���¼�����:ij�������ڵȴ�ijЩ��Ϣ,�����������жϷ����������������Ϣ����ô"������Ϣ"?�����ܶ�,��:����֪ͨ(task notification)������(queue)���¼���(event group)���ź���(semaphoe)��������(mutex)�ȡ���Щ������������ͬ����Ϣ,�����ʾij������õ������ݡ�
3.7.2 ���õ����㷨
????????��ν�����㷨,������ôȷ���ĸ�����̬����������л�Ϊ����״̬��ͨ�������ļ�FreeRTOSConfig.h�����õ����㷨:���� configUSE_TICKLESS_IDLE ��һ����ѡ��,���ڹر�Tick�ж���ʵ��ʡ�硣���ڼ���configUSE_TICKLESS_IDLE����Ϊ0,�Ȳ�ʹ��������ܡ�
????????�����㷨����Ϊ��Ҫ������������:�����ȼ������������С�ͬ���ȼ��ľ���̬������α�ѡ�С������㷨Ҫȷ��ͬ���ȼ��ľ���̬����,��"����"����,������"��ת����"(Round Robin Scheduling)����ת���Ȳ�����֤���������ʱ���ǹ�ƽ�����,������ϸ��ʱ��ķ��䷽����
��3���Ƕ�ͳһ������ֵ����㷨:
-
�ɷ���ռ?�����ȼ��������ܷ�����ִ��(������: configUSE_PREEMPTION)
-
����:������"����ռ����"(Pre-emptive),�����ȼ��ľ�����������ִ��,������ϸ����
-
������:��������ֻ��Э����,������"��������ģʽ"(Co-operative Scheduling)
-
��ǰ����ִ��ʱ,�������ȼ������������Ҳ������������,ֻ�ܵȴ���ǰ���������ó�CPU��Դ��
-
����ͬ���ȼ�������Ҳֻ�ܵȴ�:�������ȼ�����������ռ,ƽ���ĸ�Ӧ����ʵ��
-
-
-
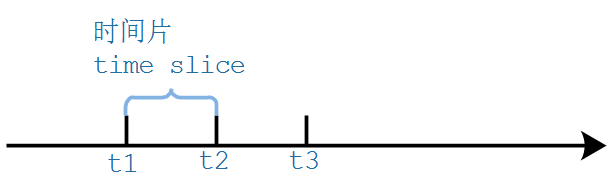
����ռ��ǰ����,ͬ���ȼ��������Ƿ�����ִ��(������:configUSE_TIME_SLICING)
-
����ִ��:����Ϊ"ʱ��Ƭ��ת"(Time Slicing),ͬ���ȼ�����������ִ��,��ִ��һ��ʱ��Ƭ������ִ��һ��ʱ��Ƭ
-
������ִ��:Ӣ��Ϊ"without Time Slicing",��ǰ�����һֱִ��,ֱ���������������߱������ȼ�������ռ
-
-
��"����ռ"+"ʱ��Ƭ��ת"��ǰ����,��һ��ϸ��:���������Ƿ��ò����û�����(������:configIDLE_SHOULD_YIELD)
-
�����������һ��,ÿִ��һ��ѭ��,�Ϳ����Ƿ�������λ���û�����
-
����������û�����һ��,�������ִ��,û��˭������
-
�����:
| ������˵�� | ������ | ���÷�ʽ | ||||
|---|---|---|---|---|---|---|
| A | B | C | D | E | ||
| ���� | ������ | ������ | ������ | �������� | ||
| �Ƿ� ����ռ | configUSE_PREEMPTION | 1 | 1 | 1 | 1 | 0 |
| �Ƿ� ʱ��Ƭ��ת | configUSE_TIME_SLICING | 1 | 1 | 0 | 0 | x |
| �Ƿ� ���������ò� | configIDLE_SHOULD_YIELD | 1 | 0 | 1 | 0 | x |
| �ر�Tick�ж���ʵ��ʡ�� | configUSE_TICKLESS_IDLE | 0 | 0 | 0 | 0 | 0 |
ע:
-
A:����ռ+ʱ��Ƭ��ת+���������ò�
-
B:����ռ+ʱ��Ƭ��ת+���������ò�
-
C:����ռ+��ʱ��Ƭ��ת+���������ò�
-
D:����ռ+��ʱ��Ƭ��ת+���������ò�
-
E:��������
�����������ļ�
configUSE_PREEMPTION��configIDLE_SHOULD_YIELD��������FreeRTOSConfig.h���Ѷ���,ֻ�������Ҫ��!
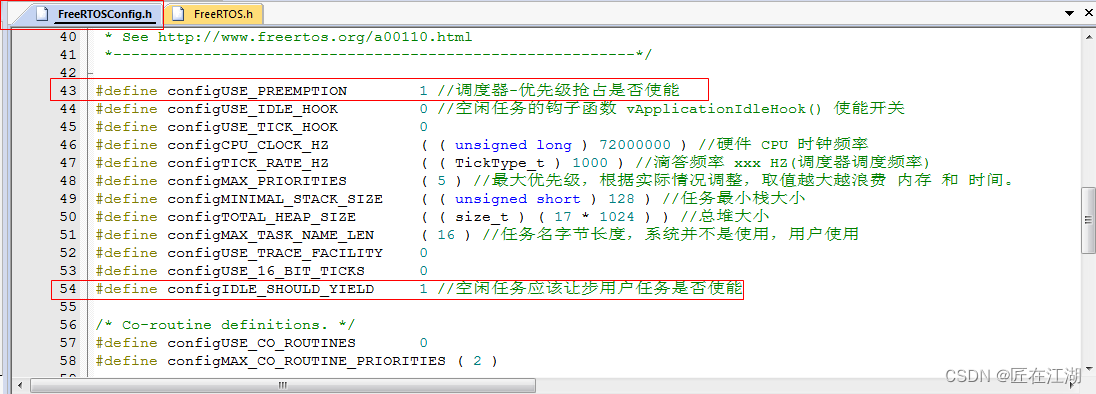
configUSE_TIME_SLICING��configUSE_TICKLESS_IDLE��������FreeRTOS.h��,��FreeRTOSConfig.h�� û�ж��� ��ʹ��FreeRTOS.h�е�Ĭ��ֵ����ΪFreeRTOS.h���Ȱ�����FreeRTOSConfig.h�ļ���



3.7.3 ʾ��: ����
�����������۲�Ч����������3������:Task1��Task2�����ȼ�����0,����������һ��,Task3���ȼ����Ϊ2�������ﶨ����4��ȫ�ֱ���,��ij��������ִ��ʱ,��Ӧ�ı����ͱ���Ϊ1,����ͨ��Keil���������Dz鿴�����л����:
/**
******************************************************************************
* @brief ���� ����
* @param pvParameters: �������ָ��
* @retval None
* @note
******************************************************************************
*/
static volatile char flagIdleTaskrun = 0; // ������������ʱflagIdleTaskrun=1
static volatile char flagTask1run = 0; // ����1����ʱflagTask1run=1
static volatile char flagTask2run = 0; // ����2����ʱflagTask2run=1
static volatile char flagTask3run = 0; // ����3����ʱflagTask3run=1
//����1������2��������,������"��������"(continuous task):
void vTask1( void *pvParameters ) //��������
{
pvParameters = pvParameters; //ʹ��һ��,��ֹ�������
for( ;; ) //������������һ�㶼������ѭ��,
{
flagIdleTaskrun = 0;
flagTask1run = 1;
flagTask2run = 0;
flagTask3run = 0;
printf("T1\r\n"); //��ӡ�������Ϣ
}
}
void vTask2( void *pvParameters )
{
pvParameters = pvParameters; //ʹ��һ��,��ֹ�������
for( ;; ) //������������һ�㶼������ѭ��,
{
flagIdleTaskrun = 0;
flagTask1run = 0;
flagTask2run = 1;
flagTask3run = 0;
printf("T2\r\n"); //��ӡ�������Ϣ
}
}
void vTask3( void *pvParameters )
{
const TickType_t xDelay5ms = pdMS_TO_TICKS( 5UL );
pvParameters = pvParameters; //ʹ��һ��,��ֹ�������
for( ;; ) //������������һ�㶼������ѭ��,
{
flagIdleTaskrun = 0;
flagTask1run = 0;
flagTask2run = 0;
flagTask3run = 1;
printf("T3\r\n"); //��ӡ�������Ϣ
vTaskDelay( xDelay5ms ); //��������ߵĻ�, �����������õ�ִ��
}
}
void vApplicationIdleHook(void) //��������Ĺ��Ӻ���
{
flagIdleTaskrun = 1;
flagTask1run = 0;
flagTask2run = 0;
flagTask3run = 0;
/* ��������ӡ��flagIdleTaskrun��Ϊ1��ʱ��ά�ֳ�һ�� */
printf("Id\r\n");
}
/**
******************************************************************************
* @brief main ����
* @param None
* @retval None
* @note �Զ�����һ����ѭ������,���Զ����ɵ�main()�����е��á�Ϊ�˼������Զ����ɵĺ���
******************************************************************************
*/
void MainLoop(void)
{
printf("FreeRTOS Test\r\n");
xTaskCreate(vTask1, "Task1", 128, NULL, 0, NULL);
xTaskCreate(vTask2, "Task2", 128, NULL, 0, NULL);
xTaskCreate(vTask3, "Task3", 128, NULL, 2, NULL);
vTaskStartScheduler(); //�����������.һ����������ϵͳ,CPU�ͻ��ܵ�������ȥִ�д���
for( ;; );
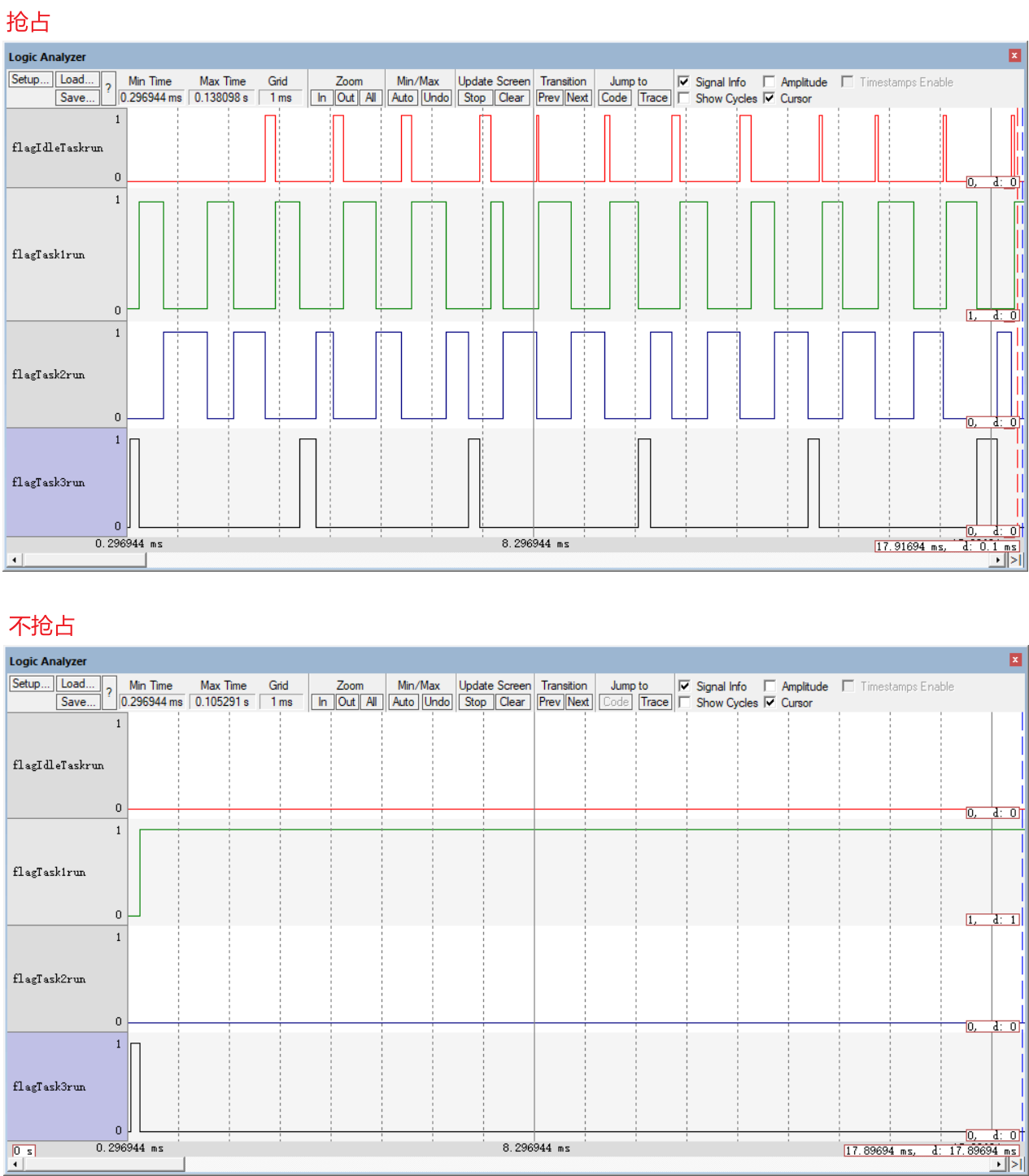
}3.7.4 �Ա�Ч��: ��ռ���
��FreeRTOSConfig.h��,���������ĺ�,�Ա��������ǵ�Ч��:
// ʵ��1:��ռ
#define configUSE_PREEMPTION 1
#define configUSE_TIME_SLICING 1
#define configIDLE_SHOULD_YIELD 1
// ʵ��2:����ռ
#define configUSE_PREEMPTION 0
#define configUSE_TIME_SLICING 1
#define configIDLE_SHOULD_YIELD 1������ĶԱ�ͼ����֪��:
-
��ռʱ:�����ȼ��������ʱ,�Ϳ�������ִ��
-
����ռʱ:���ȼ�ʧȥ������,��Ȼ������ռ��ֻ��Э����,ͼ������1һֱ������(һ�㶼û��Э�̾���),����������ִ�С���ʹ����3��
vTaskDelay�Ѿ���ʱ����ʹ�������ȼ�����,��û�취ִ�С�
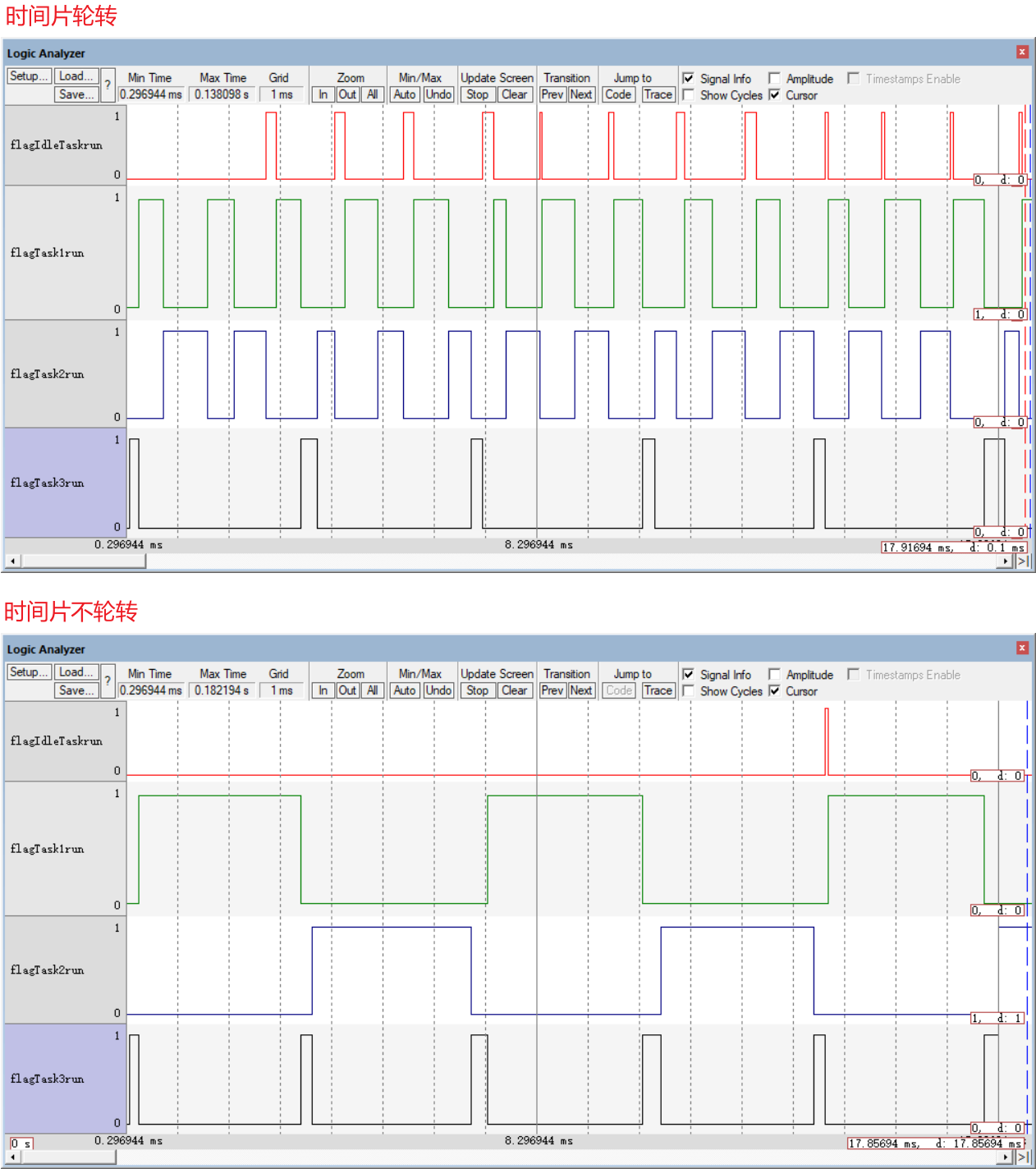
3.7.5 �Ա�Ч��: ʱ��Ƭ��ת���
��FreeRTOSConfig.h��,���������ĺ�,�Ա��������ǵ�Ч��:
// ʵ��1:ʱ��Ƭ��ת
#define configUSE_PREEMPTION 1
#define configUSE_TIME_SLICING 1
#define configIDLE_SHOULD_YIELD 1
// ʵ��2:ʱ��Ƭ����ת
#define configUSE_PREEMPTION 1
#define configUSE_TIME_SLICING 0
#define configIDLE_SHOULD_YIELD 1������ĶԱ�ͼ����֪��:
-
ʱ��Ƭ��ת:��Tick�ж��л����������л�
-
ʱ��Ƭ����ת:�����ȼ��������ʱ�����������л�,�����ȼ�����������ʱҲ�����������л������Կ�������3�������������ִ��,��������Ϻ��������л�������ʱ��û�������л�,���Կ�������1������2�������˺ܳ�ʱ�䡣
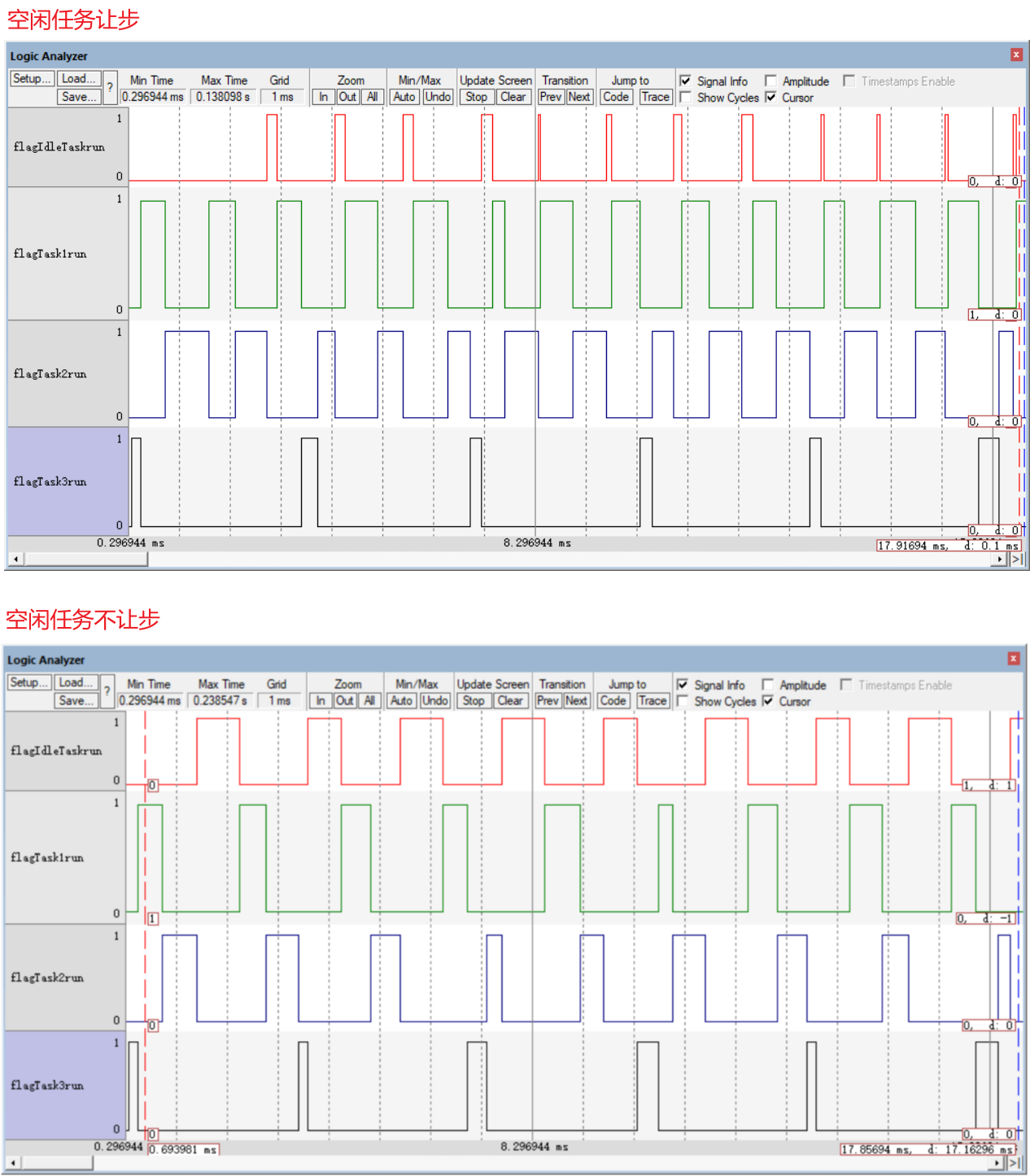
3.7.6 �Ա�Ч��: ���������ò�
��FreeRTOSConfig.h��,���������ĺ�,�Ա��������ǵ�Ч��:
// ʵ��1:���������ò�
#define configUSE_PREEMPTION 1
#define configUSE_TIME_SLICING 1
#define configIDLE_SHOULD_YIELD 1
// ʵ��2:���������ò�
#define configUSE_PREEMPTION 1
#define configUSE_TIME_SLICING 1
#define configIDLE_SHOULD_YIELD 0������ĶԱ�ͼ����֪��:
-
�ò�ʱ:�ڿ��������ÿ��ѭ����,�������ó�������,��ͼ�п��Կ���flagIdelTaskrun�IJ��κ�С
-
���ò�ʱ:�������������1������2ͬ�ȴ���,���ǵIJ��ο����Dz���